光滑粒子流体动力学法拉伸不稳定性改进研究
2010-03-24 06:10马志涛庞宝君
哈尔滨工业大学学报 2010年9期
贾 斌,马志涛,张 伟,庞宝君
(1.哈尔滨工业大学航天工程系,哈尔滨150080,jiabin@hit.edu.cn;2.清华大学航天航空学院,北京100084)
光滑粒子流体动力学(Smoothed Particle Hydrodynamics,简称SPH)法最初是由Lucy L B[1]于1977年提出的一种纯Lagrange无网格方法,并在天体物理领域里得到了广泛应用,成功地模拟了超新星爆发、银河系的形成和演化、云团的碰撞等超大尺度的复杂问题.该方法的基本思想是将整个流场的物质离散为一系列具有质量、速度和能量的“粒子”,然后通过一个称为“核函数”的积分进行“核函数估值”,从而求得流场中不同位置在不同时刻的各种动力学量.1993年Libersky L D等[2]首先将材料强度效应引入SPH方法,成功进行了高速碰撞数值模拟.
但SPH方法中存在着一些内在的缺点,其中一个主要问题便是1995年Swegle J W等人[3]指出的在具有材料强度的问题中存在着拉伸不稳定性.为改进这一问题,Morris J P[4]提出了应用特殊核函数,因为拉伸不稳定与核函数的二阶导数紧密相关,尽管此方法在一些情况中非常成功,但对于一般情况却不能总得到令人满意的结果.Wen Y等[5]及Balsara D S[6]提出了守恒光滑的方法来消除拉伸不稳定,但该方法并不能解决所有的情况,而且还增加了计算时间.Dyka C T等[7-8]首次在一维算法中引入了应力点法,随后Randles P W等[9]将该方法扩展到了多维空间,其中SPH粒子与应力粒子交错排列,该方法虽然能够解决拉伸不稳定,但增加了大量的计算时间和内存.Monaghan J J等[10-11]提出了用于稳定计算的人工力,该力与具体的核函数有关,虽然在一定程度上解决了拉伸不稳定的问题,但依然存在一定的震荡.本文提出了一种改进形式的人工力,并在人工粘性力的基础上叠加抗拉伸不稳定的人工力,建立了统一的张量形式的人工力.
1 SPH基本方程
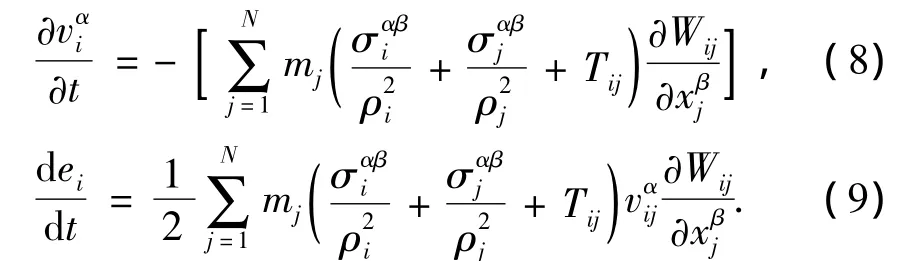
考虑材料的弹塑性效应,全应力张量空间中的SPH插值公式的质量守恒方程、动量守恒方程、能量守恒方程分别表示为[12-13]

其中:ρ为密度;m为粒子质量;v为粒子速度;σαβ为应力张量(上角标α和β表示张量坐标);e为比内能;x为位置矢量;W为核函数;下标i为粒子编号,下标j为i粒子的近邻粒子编号.核函数取最常用的三次B-Spline函数

其中:s=|x-x'|/h,h是光滑长度;在一维、二维、三维中,αd分别为1/h,15/(7πh2),3/(2πh3);函数的影响域|x|=2h.
2 拉伸不稳定性
2.1 压缩失稳与拉伸失稳
所谓拉伸不稳定性,是指当粒子处于拉伸应力状态时,粒子的运动变得不稳定,从而出现粒子凝集和较大的空洞.Swegle J W等[3]曾对其进行了比较细致的研究,指出这种不稳定性是由核函数的二阶导数和应力状态的乘积决定的,并提出了拉伸失稳产生的充分条件,如下式所示:

式中:W″是核函数的二阶导数.
式(4)的三次B-Spline函数曲线和一阶导数曲线如图1所示,图中s=r/h(r为粒子i和粒子j的间距),核函数一阶导数的绝对值在s=2/3处有极大值.根据式(5),如果核函数的二阶导数为正,则SPH方法在拉伸应力状态下是不稳定的,会出现拉伸失稳现象;反之,则是稳定的.因此,在B-Spline函数中,可以将极值点右侧的区域称为拉伸失稳区.当s>2/3时,核函数一阶导数的绝对值随着两点距离的增大而减小,即邻近点j对计算点i的贡献随着距离的增大而减小.当s<2/3时,核函数一阶导数的绝对值随着两点距离的减小而减小,即j对i的贡献随着距离的减小反而减小,说明j对i的贡献要小于离i更远的粒子对i的贡献,并且这种趋势随两点距离的减小而加剧,这便是压缩失稳产生的根本原因.因此,可将极值点左侧的区域称为压缩失稳区.
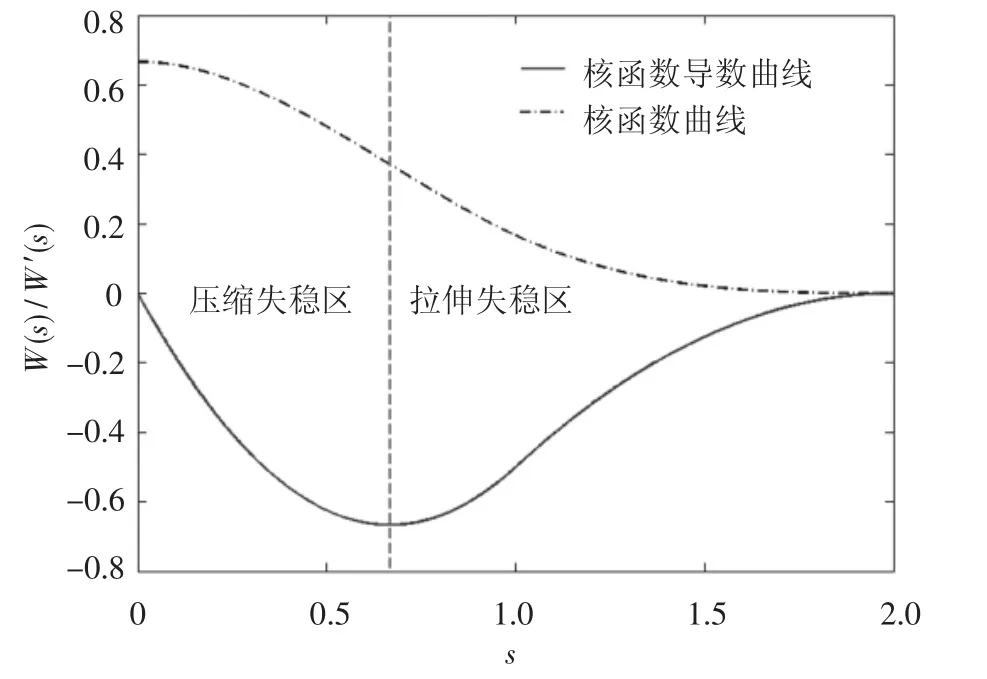
图1 三次B-Spline函数及其一阶导数曲线
2.2 消除压缩失稳的人工粘性
压缩失稳可通过引入人工粘性来解决.人工粘性的形式很多,但通常采用的形式包含两种不同类型的粘性,即适用于消除波后振荡的线性粘性Π =-αρlc▽·v和抑制冲击波强间断面数值振荡的二次粘性Π=βρl2(▽·v)2.其中:α和β是无量纲系数;l是激波长度传播尺度;c是声速.
将上述两种粘性考虑在一起,Monaghan J J等[14]给出了适合于SPH法的混合型人工粘性

引入人工粘性后,式(2)和式(3)分别变为

2.3 改进拉伸失稳的人工力
Swegle J W等[3]指出拉伸不稳定既不依赖于人工粘性,也不依赖于时间积分项,它是典型的与状态方程无关的问题,因为在状态方程中不产生拉伸应力.Monaghan J J等[10-11]提出了用于稳定计算的人工力,该力与具体的核函数有关,对于三阶B-Spline函数,当h<rij≤2h时,
式中:rij为粒子i和粒子j的间距,h为两粒子平均光滑长度,σ和ρ分别为应力和密度;ε和n无量纲,通常为0.2和4.式(2)和式(3)分别变为
当rij=2h时式(8)和(9)不连续,而且当粒子间距rij增大时Tij大幅减小,难以抵消拉伸不稳定的影响.因此虽然在一定程度上解决了拉伸不稳定的问题,但依然存在一定的震荡.为了进一步解决拉伸不稳定问题,考虑到物体处于弹性拉伸时弹性模量乘以应变即是应力的现象,本文提出了如下形式的人工力:

式中,κ通常取0.1~0.3;E为弹性模量;α和β的取值范围通常为0.2~1.0和1.0~5.0.该人工力是连续的,其第一项随粒子间距rij增大而增大,与式(7)相比可更有效地抵消拉伸不稳定的影响;第二项为粒子分离时的人工粘性力[15].该人工力起作用的条件为
1)粒子间距:当h<rij≤2h时;
2)粒子反向运动:当vij·xij>0时;
3)粒子状态:相互作用的粒子是固体,并且尚未失效;
4)粒子归属:相互作用的粒子属于同一物体.
对于二维和三维情况,Owen J M[16]提出了张量形式的人工粘性力,对消除压缩失稳得到了较好的结果.本文在该人工粘性力的基础上叠加抗拉伸不稳定的人工力,建立了统一形式的人工力,此时式(2)和式(3)分别变为
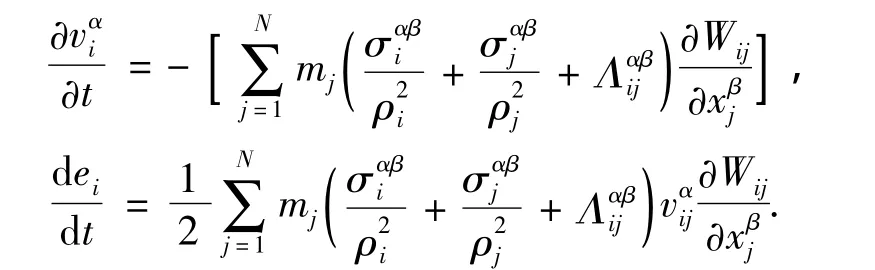
式中:统一张量形式的人工力Λαβij=Ταβij-Παβij,张量形式的人工粘性力Παβij有如下定义[16]:


3 算例
3.1 算例1
设一维铝杆长 100 mm,左半部分具有-100 m/s的初速度,右半部分静止.由于拉力作用,应力波从中间向两侧传播.将该铝杆进行均匀离散,光滑长度取为0.1 mm,采用三阶B-Spline核函数和所提出的人工力,计算至5 μs.铝杆材料为 Al 2024,采用 Mie-Grüneisen状态方程和Johnson-Cook强度模型进行模拟,材料参数见表1和表2.

表1 Mie-Grüneisen状态方程参数

表2 Johnson-Cook强度模型参数
Mie-Grüneisen状态方程为

其中:pH=ρ0cμ(1+μ)/[1-(s-1)μ]2,eH= (pHμ)/(2ρ0(1+μ)),μ=(ρ/ρ0)-1,Γρ= Γ0ρ0=const,U=c0+sup.式中:p和e分别为静水压力和比内能;pH和eH分别为冲击Hugoniot曲线上静水压力和比内能的参考值;Γ和ρ分别为Grüneisun参数和密度,相应地 Γ0和 ρ0为初始Grüneisun参数和初始密度;U和up分别为冲击波波速和波后质点速度,c0为体积声速,s为U和up之间线性关系的斜率;μ为压缩比.
Johnson-Cook强度模型为

式中:σy为屈服应力;εp为等效塑性应变;˙εp为等效塑性应变率;参考应变率=1 s-1;若T为温度,TRoom为室温,TMelt为熔点,则T*=(T-TRoom)/ (TMelt-TRoom);A,B,n,C和m是材料常数.

图2 5 μs时杆中应力-位置曲线
计算得到的5 μs时杆中应力 -位置曲线如图2所示.其中,图(a)为通过Ansys Autodyn v6.1利用有限元法的计算结果,不会出现拉伸不稳定现象;图(b)中显示了没有施加人工力时SPH法产生了极度不稳定现象.当加入Monaghan J J等提出的人工力进行模拟后,结果如图(c)所示,其曲线整体趋势与图(a)相同,在一定程度上解决了拉伸不稳定的问题,但依然存在一定的振荡.使用本文的人工力后计算结果如图(d)所示,可以看出得到的曲线平滑且几乎不产生振荡,与有限元结果非常接近,拉伸不稳定性得到了较大改善,其效果优于Monaghan J J等提出的人工力.
3.2 算例2
设一维铝杆长 100 mm,左半部分具有-100 m/s的初速度,右半部分具有100 m/s的初速度.材料及离散方式与算例1相同,计算得到的5 μs时杆中应力-位置曲线如图3所示.
其中,通过Ansys Autodyn v6.1利用有限元法的计算结果如图(a)所示;图(b)显示了没有施加人工力时SPH法产生的极度不稳定现象.当加入Monaghan J J等提出的人工力进行模拟后,结果如图(c)所示.使用本文的人工力后计算结果如图(d)所示.从图中可以看出,通过施加本文人工力得到的曲线更加平滑且振荡较小,与有限元结果接近,其效果优于Monaghan J J等提出的人工力.

图3 5 μs时杆中应力-位置曲线
[1]LUCY L B.A numerical approach to the testing of the fission hypothesis[J].Astronomical Journal,1977,82: 1013-1020.
[2]LIBERSKY L D,PETSCHEK A G,CARNEY T C,et al. High strain Lagrangian hydrodynamics:a three-dimensional SPH code for dynamic material response[J].Journal of Computational Physics,1993,109(1):67-75.
[3]SWEGLE J W,HICKS D L,ATTAWAY S W.Smoothed Particle Hydrodynamics stability analysis[J].Journal of Computational Physics,1995,116(1):123-134.
[4]MORRIS J P.Analysis of Smoothed Particle Hydrodynamics with applications[D].Melbourne:Monash University,1996.
[5]WEN Y,HICKS D L,SWEGLE J W.Stabilizing SPH with conservative smoothing,SAND94-1932[R].Albuquerque:Sandia National Laboratories,1994.
[6]BALSARA D S.Von Neumann stability analysis of Smoothed Particle Hydrodynamics-suggestions for optimal algorithms[J].Journal of Computational Physics,1995,121(2):357-372.
[7]DYKA C T,INGEL R P.An approach for tension instability in Smoothed Particle Hydrodynamics[J].Computers and Structures,1995,57(4):573-580.
[8]DYKA C T,RANDLES P W,INGEL R P.Stress points for tension instability in Smoothed Particle Hydrodynamics[J].International Journal for Numerical Methods in Engineering,1997,40(13):2325-2341.
[9]RANDLES P W,LIBERSKY L D.Normalized SPH with stress points[J].International Journal for Numerical Methods in Engineering,2000,47(10):1445-1462.
[10]MONAGHAN J J.SPH without a tensile instability[J].Journal of Computational Physics,2000,159(2):290-311.
[11]GRAY J P,MONAGHAN J J,SWIFT R P.SPH elastic dynamics[J].Computer Methods in Applied Mechanics and Engineering,2001,190(49-50):6641-6662.
[12]CUMMINS S J,RUDMAN M.An SPH projection method[J].Journal of Computational Physics,1999,152 (2):584-607.
[13]MONAGHAN J J.Extrapolating B-Splines for interpolation[J].Journal of Computational Physics,1985,60 (2):253-262.
[14]MONAGHAN J J,GINGOLD R A.Shock simulation by the particle method SPH[J].Journal of Computational Physics,1983,52(2):374-389.
[15]SWEGLE J W,ATTAWAY S W,HEINSTEIN M W.An analysis ofSmoothed Particle Hydrodynamics,SAND93-2513[R].Albuquerque:Sandia National Laboratories,1994.
[16]OWEN J M.A tensor artificial viscosity for SPH[J].Journal of Computational Physics,2004,201(2):601-629.
猜你喜欢
数学年刊A辑(中文版)(2022年3期)2023-01-05
煤气与热力(2021年6期)2021-07-28
皮革制作与环保科技(2020年13期)2020-03-17
数学物理学报(2019年6期)2020-01-13
数学物理学报(2018年2期)2018-05-14
北京航空航天大学学报(2017年1期)2017-11-24
中国继续医学教育(2015年1期)2016-01-06
华东理工大学学报(自然科学版)(2015年3期)2015-11-07
沈阳医学院学报(2014年4期)2014-12-27
中国卫生(2014年8期)2014-11-12