
未知环境下模块化移动机器人路径规划的研究
2010-03-23 09:53费燕琼朱跃梁
哈尔滨工程大学学报 2010年9期
费燕琼,朱跃梁,徐 磊
(上海交通大学 机器人研究所,上海 200240)
模块化移动机器人[1]是由几个功能独立的单元模块组成,它的优点是维护容易、修复方便、成本降低、加工周期缩短,如果一个单元模块出现故障,可以在较短的时间内将故障的模块直接替换而不需要改变其他模块,同非模块化机器人相比,极大地降低了维修护理的费用,并且每个模块可批量生产,大大降低了生产成本.目前国内外对移动机器人的研究和应用较多,但对模块化移动机器人的研究很少,有必要把模块化的思想应用到移动机器人中,扩大它的使用范围.
对于移动机器人,主要研究其路径规划问题.目前国内外研究机器人路径规划的方法中以人工势场法较为成熟[2-3].该方法的优点在于无需大量的计算,自动产生较光滑的路径,并且由于使用局部信息,可以满足实时运行要求.但由于势场法把所有信息压缩成单个合力,从而损失部分有价值的局部障碍物分布信息,容易陷入局部最小而不能使机器人到达目标位置[4-5].有些学者采用神经网络法[6-7],其基本原理是将环境障碍等作为神经网络的输入层信息,经由神经网络并行处理,神经网络输出层输出期望的转向角和速度等引导机器人避障行驶以到达目的地.其优点是并行处理效率高,具有学习功能,能收敛到最优路径.但神经网络整体应用却不是非常成功.模糊逻辑算法[8-10]是基于对驾驶员的工作过程观察研究而得出的,该方法克服了势场法易产生局部极小问题,对处理未知环境下的规划问题显示出很大优越性,对于解决用通常的定量方法来说很复杂的问题或当外界只能提供定性近似的、不确定信息数据也非常有效.但目前国内外对移动机器人的研究大多集中在二维环境下的路径规划,对三维环境的路径规划研究较少,还很不成熟.
本文首先设计了一种新颖的模块化移动机器人,针对该机器人提出一种基于模糊逻辑推理的移动机器人“感知-动作”行为控制新方法,并把该方法运用到复杂未知环境下自主移动机器人的路径规划中,解决了机器人的导航和避障问题.
1 移动机器人的模块化结构
将移动机器人的结构模块化,使机器人具有更好的鲁棒性,且有助于移动机器人结构的标准化及批量生产.本文设计的模块化移动机器人结构(如图1(a))主要由驱动模块、控制模块、传感模块及标准连接模块4个基本功能模块组成.传感模块:使用各种传感器来获得环境动态变化的信息,根据传感器采集数据、处理数据并确定移动机器人的行为.驱动模块(如图1(b)):驱动机器人运动并执行任务.控制模块:主要由电池、电机及控制电路板组成,给机器人提供能源,控制移动机器人动作.标准接口模块:物理连接机构(机械、电子连接口),便于各模块间、机器人间的相互快速连接、脱离.
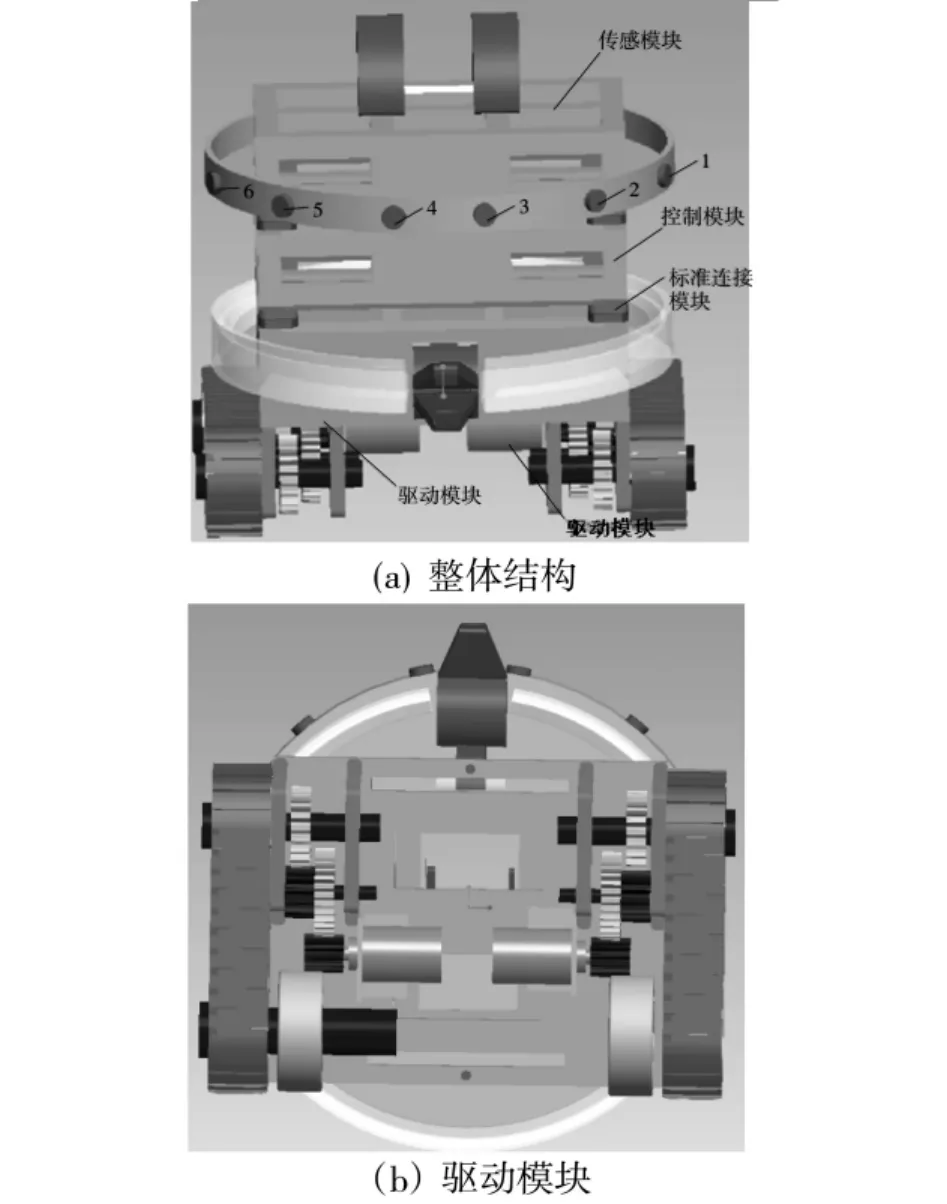
图1 模块化移动机器人Fig.1 Modular mobile robot
2 避障模糊控制器的设计
2.1 基于感知-动作的移动机器人避障模糊控制器
把基于感知-动作的模糊控制新方法用于模块化移动机器人的模糊逻辑控制方案中(如图2),所选取的模糊控制器的输入变量为左、右两侧传感器的距离(DL、DR),输出变量为机器人平动速度和转动角度.该机器人通过图1(a)所示的安装在机器人前端的6个超声传感器阵列来获取环境信息,得到移动机器人左侧、右侧的障碍物距离信息.
超声传感器从左向右按顺时针顺序进行编号(如图1(a)),依次为1、2、3、4、5、6.把6个超声传感器的输入信号分为左、右2组,每组3个,即机器人左边3个超声传感器(1、2、3)为左组,机器人右边3个超声传感器(4、5、6)为右组.每次读入左组3个超声传感器测得的距离信号x1、x2、x3,选取其中最小的一个数值DL=min{x1,x2,x3}作为左边的输入;同样,每次读入右组3个超声传感器测得的距离信号x4、x5、x6,选取其中最小的一个数值 DR= min{x4,x5,x6}作为右边的输入.
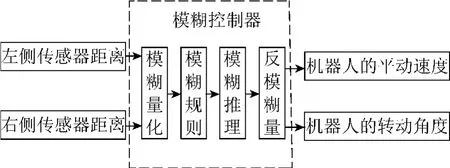
图2 模块化移动机器人的模糊逻辑控制方案Fig.2 Fuzzy logic control scheme of the robot
2.2 系统输入、输出变量的模糊化
模糊控制器的输入语言变量是该机器人超声传感器信号,其分别为DL和DR.使用连续型论域,采用线性化处理方法,将其距离输入变量的模糊子集划分为{近,中,远},表示为:{ND,MD,FD}.根据超声传感器的实际测量距离,其实际论域为[0.5 m,1.5 m],取计算论域为[-5,5].采用线性变换,则

式中,x*为实际距离值,x为离散论域点,k1=10为比例因子.
左、右两侧输入距离的模糊语言隶属度函数如图3(a)所示.其模糊变量赋值如表1所示.
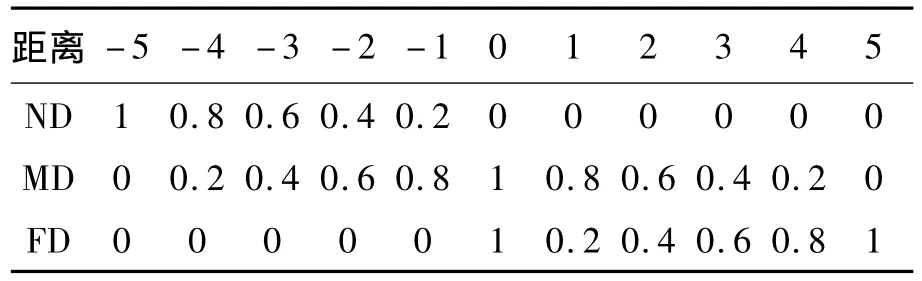
表1 输入距离模糊变量的赋值表Table 1 Fuzzy variable assignment sheet of the input distance
本模块化移动机器人的输出变量为该机器人的平动速度和转动角度,分别用V和θ表示.V的模糊子集划分为{零,慢,中,快},简化为:{VZ,VL,VM,VF}.移动机器人的实际速度范围为[0,2 km/h],将其量化为:当0≤v<0.3 km/h,等级为 0;当 0.3 km/h≤v<0.6 km/h,等级为1;当0.6 km/h≤v<0.9 km/h,等级为2;当0.9 km/h≤v≤1.2 km/h,等级为3;当1.2 km/h≤v≤1.5 km/h,等级为4;当1.5 km/h≤v≤1.8 km/h,等级为5;当1.8 km/h≤v≤2.0 km/h,等级为6,故平动速度V的论域为[0,6].
转动角度θ的模糊子集划分为{负大,负小,零,正小,正大},简化表示为{NB,NS,Z,PS,PB}.该机器人转动角度θ的实际论域范围为[-60°,60°],取向左为正方向,其计算论域为[-6,6].采用线性变换,则

式中:y*为实际转动角度值,y为离散论域点,k2= 1/10为比例因子.平动速度V和转动角度θ的模糊语言隶属度函数如图3(b)、(c)所示.
2.3 基于感知-动作的模糊控制规则的建立
模糊控制规则是一组多重条件语句,由模糊集合理论可知,这种因果关系可以表示为从输入变量到输出变量的2个模糊关系矩阵.当机器人距离障碍物较远时,趋向目标的行为起主要控制作用,机器人尽量对准目标前进;当机器人距离障碍物较近时,模糊控制的避障行为起主要的作用,机器人根据障碍物的分布方位结合目标方位做出合理的决策,在保证避障的同时尽量靠近目标.
根据模糊逻辑推理的基本理论及控制策略,规定2个定性输入变量DL、DR和2个定性输出变量V、θ.根据生物学上的“感知-动作”的行为,简化模糊控制规则.如:移动机器人前进过程中,若左方障碍物较近,右方障碍物较远,则定义移动机器人的平动速度V为中速VM,转动角度θ为大角度向右旋转PB.表达为

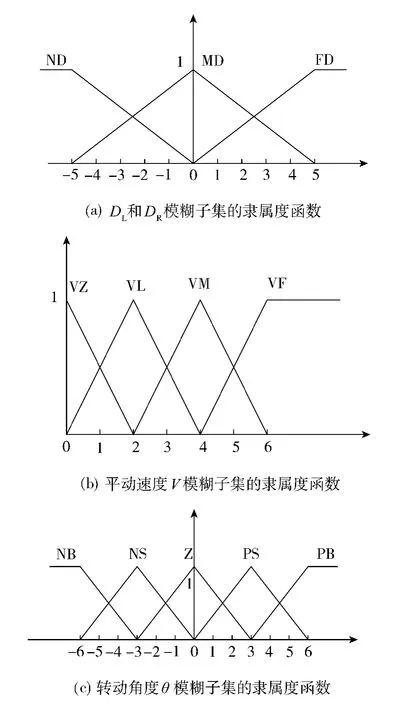
图3 隶属度函数Fig.3 Membership function
将类似的9条规则R1~R9列举出并存放到数据库中,以供查询,即表2.其中U代表输出变量即平动速度V和转动角度θ.
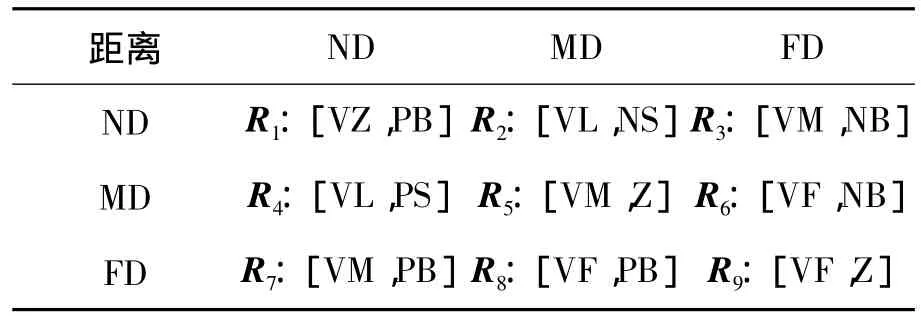
表2 模糊控制规则表Table 2 Fuzzy control rule table
系统总的控制规则R可采用并的方法求出,即

该控制器是一个两输入两输出的模糊控制器,由于V和θ相互独立,故可以分别对V和θ进行模糊推理运算.以V为例,模糊关系可表示为

式中:i为规则序号,Ui代表第i个系统输出结果,“×”表示2个集合的直积,“◦”表示2个集合的合成关系.由检测到的右侧距离变量和左侧距离变量得到输出:

根据上述公式得到的输出是模糊量,不能直接控制被控对象,需要进行非模糊化、转换成精确量才能执行.本文采用重心法,即将模糊隶属度函数曲线与横坐标轴围成面积的质量中心作为模糊推理的最终输出值.其表达式如下:
式中:uN(x)代表输入量DL、DR对应的隶属度函数,x代表输出量V和θ隶属度函数所对应面积的重心.
3 二维仿真
模块化移动机器人从起点运动到目标点的过程中,实际上有2种行为,即避障行为和趋向目标的行为,这2种行为被融合进了模糊控制器,共同作用后输出得到机器人的平动速度和转动速度.为了验证上述提出理论的有效性和可靠性,首先对本移动机器人的避障路径规划在二维环境下进行仿真.使用Mobotsim仿真平台[11],依照本文设计的机器人驱动原理,设置对应数目的传感器,在任意改变的二维复杂环境下,形象的模拟该模块化移动机器人的避障、趋向目标的过程.

图4 二维仿真Fig.4 2-D simulation
从图4可以看出,机器人在障碍物密集度较小(图4(a))和障碍物密集度较大(图4(b))时,都能避开障碍物成功到达目标点.
4 三维仿真
目前国内外对移动机器人路径规划算法的研究大多数建立在二维地形图上,对三维环境的路径规划研究较少.二维环境下路径规划算法的仿真并不能适用于实际问题,为了验证上述方法在实际机器人控制中的效果,采用三维仿真软件Webots,模拟移动机器人在三维环境下的避障及趋向目标点的过程.本文采用Webots提供的场景树建立机器人模型和环境模型,如图5所示.其中机器人模型的三维尺寸为 160 mm×100 mm×90 mm,车轮直径为30 mm,图 5立方环境的尺寸为 2 000 mm × 2 000 mm.

图5 三维模型Fig.5 3-D model

图6 单机器人三维仿真Fig.6 3-D simulation of a single robot
三维环境中的路径规划,不仅要考虑障碍物的形状,而且还要考虑其自身高度以及与机器人传感器高度的关系.图6为移动机器人在整个路径规划过程中的轨迹.其中图6(a)显示了在机器人初始未感知到障碍物时为趋向目标行为,故其轨迹为直线,图6(b)显示了在机器人感知到障碍物时为模糊避障行为.图7为多个机器人从各个不同地方,避开障碍物、调整好姿态,最后到达指定位置.
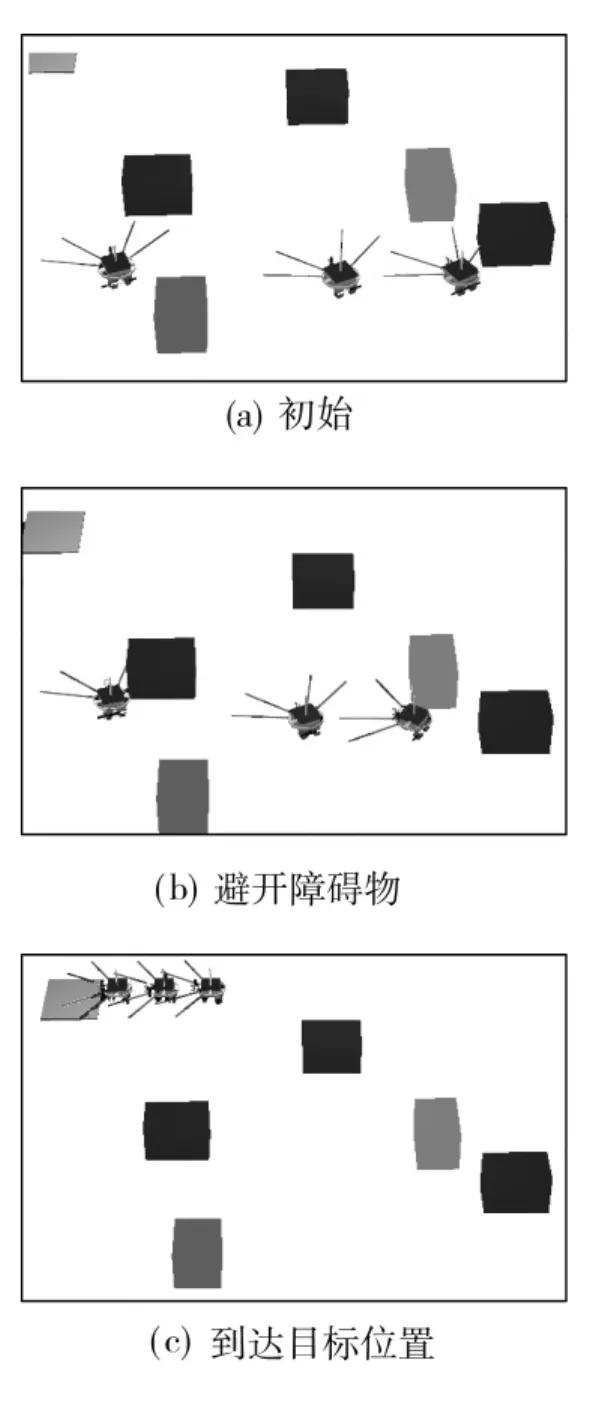
图7 多机器人三维仿真Fig.7 3-D simulation of multi-robots
5 结论
1)本文设计了一种新颖的模块化移动机器人结构,其主要由驱动模块、控制模块、传感模块及标准连接模块4个基本功能模块组成.
2)针对复杂未知环境下移动机器人的路径规划问题,提出了基于感知-动作的模糊逻辑控制体系结构,该结构中,将机器人的行为分为:有障碍物时的模糊控制避障,及无障碍物时的趋向目标行为.将障碍物的距离信息作为控制器的输入,机器人的平动速度和转动速度作为控制系统的输出,实现了对自主移动机器人二维及三维避障运动的控制.
3)在二维和三维复杂环境下,应用基于“感知-动作”的模糊逻辑控制方法对单个及多个模块化移动机器人进行了避障仿真,仿真结果验证了该方法的可行性.
[1]ROH S G,PARK K H,YANG K W,PARK J H,KIM H S,LEE H G,CHOI H R.Development of dynamically reconfigurable personal robot[C]//Proc IEEE Int Conf Robotics and Automation.New Orleans,USA,2004:4023-4028.
[2]YORAM K,JOHANN B.Potential field methods and their inherent limitations for mobile robot navigation[C]//Proc IEEE Int Conf Robotics and Automation.Sacramento,California,USA,1991:1398-1404.
[3]GE SS,CUI Y J.New potential functions for mobile robot path planning[J].IEEE Transaction on Robotics and Automation,2000,16(5):615-620.
[4]王萌,王晓荣,李春贵,等.改进人工势场法的移动机器人路径规划研究[J].计算机工程与设计,2008,29 (6):1504-1506.
WANG Meng,WANG Xiaorong,LI Chungui,et al.Study of local path planning of mobile robot based on improved artificial potential field method[J].Computer Engineering and Design,2008,29(6):1504-1506.
[5]LEE M C,PARK M G.Artificial potential field based path planning for mobile robots using a virtual obstacle concept[C]//Proceedings of 2003 IEEE/ASME International Conference on Advanced Intelligent Mechatronics.Port Island,Kobe,Japan,2003:735-740.
[6]FIERRO R,LEWIS F L.Control of nonholonomic mobile robot using neural networks[J].IEEE Trans on Neural Networks,1998,9(4):589-600.
[7]邢军,王杰.神经网络在移动机器人路径规划中的应用研究[J].微计算机信息,2005,21(11):110-112.
XING Jun,WANG Jie.Application research of artificial neural network in robot trajectory planning[J].Microcomputer Information,2005,21(11):110-112.
[8]BEZDEK J C.The coming age of fuzzy logic[C]//Proceedings of the 1989 IFSA Congress.Seattle:University of Washington,1989:303-306.
[9]ANTONELLI G,CHIAVERINI S,GIUSEPPE F.A fuzzy-logic-based approach for mobile robot path tracking[J].IEEE Transactions on Fuzzy Systems,2007,15(2):211-221.
[10]庞思红,李维,李春书,等.移动机器人模糊逻辑控制系统避障研究[J].微计算机信息,2007,23(2):250-251.
PANG Sihong,LI Wei,LI Chunshu,et al.Fuzzy control of obstacle avoidance for mobile robot[J].Microcomputer Information,2007,23(2):250-251.
[11]Cyberbotics Ltd.Webots reference manual[EB/OL].[2008-08-16].http://www.cyberbotics.com/.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
成都信息工程大学学报(2021年6期)2021-02-12
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
测控技术(2018年10期)2018-11-25
制造技术与机床(2017年3期)2017-06-23
广东石油化工学院学报(2016年3期)2016-05-17
体育科学研究(2015年5期)2015-02-28
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
中国海洋大学学报(自然科学版)(2014年7期)2014-02-28
