基于ANSYS的差动式位移放大机构性能分析
2010-03-23 09:30江晓阳陈定方
湖北工业大学学报 2010年4期
江晓阳,陈定方
(武汉理工大学智能制造与控制研究所,湖北 武汉 430063)
超磁致伸缩致动器是利用超磁致伸缩材料在外部磁场变化时发生伸缩形变特性而制作的一种新型精密致动器,具有低电压驱动、位移分辨率高等优点,在精密加工领域已显示出良好的应用前景[1].虽然超磁致伸缩材料的伸缩应变比较大,但其位移输出相对实际应用来说仍很小,一般只有几十μ m.在实际的工程应用中,有些应用场合要求有更大的位移,因此,在大位移的应用场合,需要位移放大机构与其配合.
柔性铰链是一种新型机械传动和支撑机构,用于提供绕轴做复杂运动的有限角位移.它是利用材料可逆的弹性变形来产生运动或传递能量,具有无空回、无摩擦、无间隙、无噪声、无磨损、空间尺寸小、运动灵敏度高等特点,特别适合应用于精密驱动器件中[2].常见的柔性铰链有圆弧型和直梁型2种.圆弧型柔性铰链的运动精度较高,但转动范围相对较小;直梁型柔性铰链有较大的转动范围,但运动精度较差;而倒角型柔性铰链兼顾运动精度和运动范围的优势[3-4].本文设计了一种基于倒角型柔性铰链的差动式位移放大机构,并分析了其性能.
1 差动式杠杆放大原理
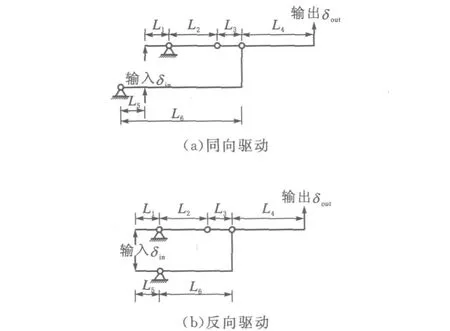
差动式杠杆放大根据输入的方向可以分为同向驱动和反向驱动2种,其原理如图1所示.采用差动式杠杆放大,可以在有效的空间尺寸内实现较大的放大倍数.
假定输入位移为δin,根据杠杆原理,则经过放大后的输出位移

理论放大倍数

2 位移放大机构的结构
位移放大机构各柔性铰链为倒角型结构,依靠铰链微转动变形实现运动的传递和位移的放大(图2).该结构具有以下特点:1)该机构采用差动式杠杆放大原理实现位移放大,方法和结构简单,空间尺寸小;2)该机构采用对称式结构,具有较高的整体刚性,输入位移可通过左右2条放大链向输出端进行传递,理论上可以完全消除机构的侧向附加位移,有效地减小了机构自身的纵向耦合位移误差;3)一体化结构易于加工,避免了装配误差.根据式(2)可以求得该机构的理论放大倍数A=11.25.
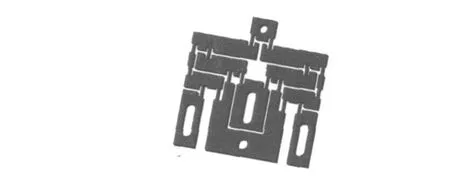
图2 位移放大机构结构图
3 位移放大机构的有限元分析
当超磁致驱动器通过位移放大机构输出位移时,由于位移放大机构采用全柔性结构,各杆件的弹性变形、柔性铰链的轴向变形以及内反力均会造成能量损耗,超磁致驱动器做的功并没有全部输出,所以位移放大机构的实际放大倍数比理论放大倍数小[5].为保证所设计的位移放大机构正确可靠地工作,需要对位移放大机构的强度、放大倍数和动态特性等进行分析,而有限元法是一种有效分析方法.
3.1 位移放大机构有限元模型
在软件ANSYS10.0中,根据位移放大机构几何模型,采用实体单元Solid95进行建模,有限元模型见图3.位移放大机构材料为60Si2Mn,弹性模量为206 GPa,泊松比为0.3.划分网格后有42208个单元和107474个节点.
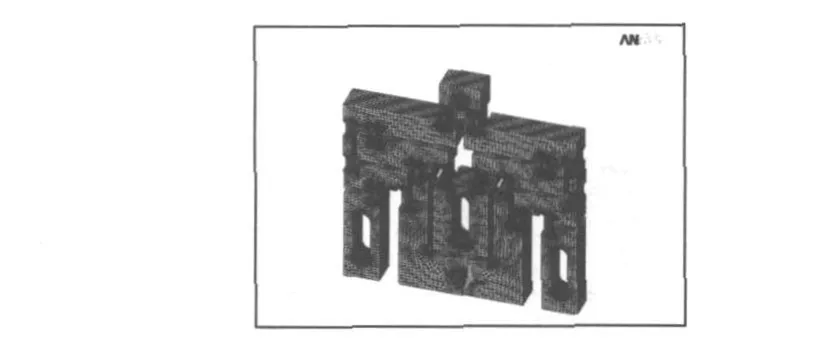
图3 位移放大机构的有限元模型
3.2 位移放大机构静态分析
本文针对的超磁致驱动器最大输出位移为0.05 mm,计算位移放大机构在不同输入下的放大倍数和强度,计算结果见表1.当位移放大机构的输入位移δin=0.05 mm时应力最大,最大应力σmax=575 MPa<885 MPa,满足强度要求.在无负载情况下,输入位移与输出位移关系曲线如图4所示.位移放大机构在不同输入作用下的放大倍数比较稳定,输出位移线性度较好.但与理论放大倍数比较,实际放大倍数只有理论放大倍数的60%,说明位移损失比较大.
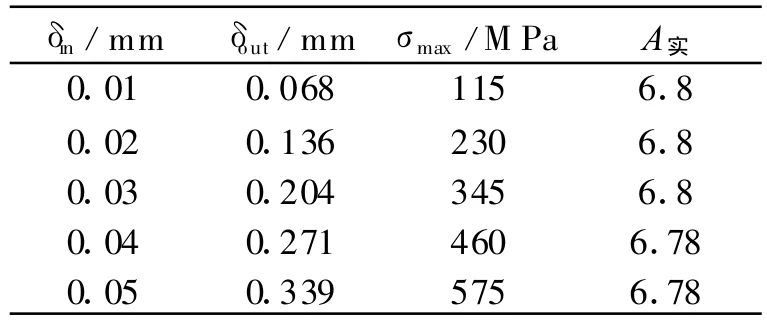
表1 不同输入位移下的输出位移和放大倍数
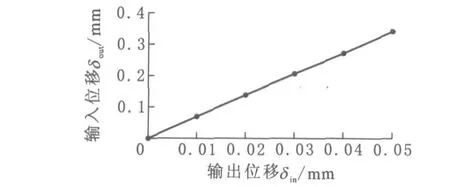
图4 输入位移与输出位移关系曲线
当放大机构的输入位移为0.05 mm时,分析不同载荷下的放大倍数和强度,计算结果见表2,负载与放大倍数关系如图5所示.分析结果表明,位移放大机构的放大倍数随负载增多而减小.
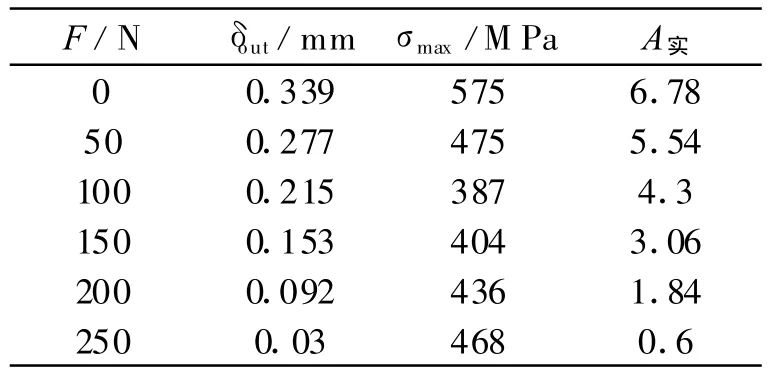
表2 不同负载下的输出位移和放大倍数
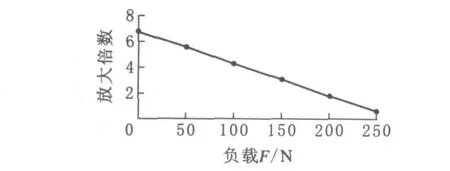
图5 负载与放大倍数关系曲线
3.3 位移放大机构模态分析
系统固有频率是评价机构内在特性的重要指标,它对系统控制和机构优化设计都有着重要的意义.由于位移放大机构的固有频率是它承受动态载荷结构设计中的重要参数,所以对放大机构进行模态分析具有重要的意义.ANSYS提供了强大的模态分析功能,计算出位移放大机构的前6阶固有频率如表3所示,前6阶振型如图6所示.
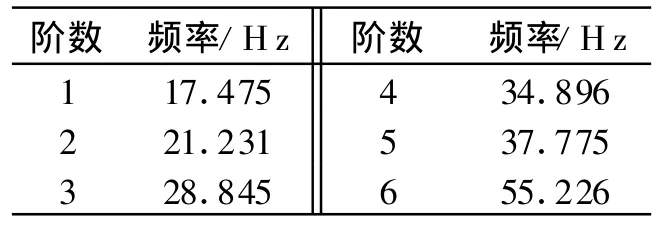
表3 模态分析结果
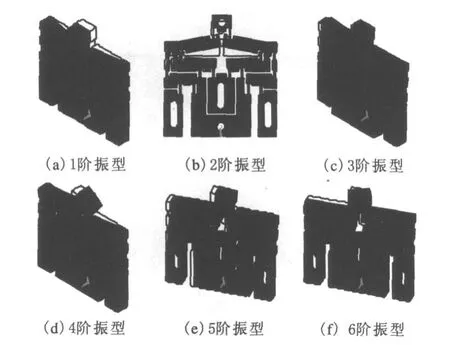
图6 位移放大机构振型
4 结束语
为了扩展超磁致驱动的应用范围,满足实际工程的需要,本文结合差动式杠杆放大原理和柔性铰链,设计了一种位移放大机构,并采用有限元方法进行仿真分析.该放大机构具有结构紧凑、易加工、空间尺寸小、放大倍数大、输出线性度大、动态性能好等优点,对实现大行程的超磁致驱动具有重要的指导性意义,并且在精密工程中具有广泛的应用前景.
[1]卢全国,陈定方,钟毓宁等.超磁致伸缩致动器热变形影响及温控研究[J].中国机械工程,2007,18(1):15-19.
[2]吴鹰飞,周兆英.柔性铰链的应用[J].中国机械工程,2002,13(18):1615-1618.
[3]Nicolae Lobontiu,Jeffrey SN Paine.Ephrahim Garcia Corner-filleted flexure hinges[J].Journal of Mechanical Design,Transactions of the ASM E,2001,123(9):346-352.
[4]成立峰,余跃庆,王雯静.椭圆形柔性铰链的频率特性分析[J].机械设计,2009,26(2):52-53.
[5]于靖军,毕树生,宗光华.全柔性微位移放大机构的设计技术研究[J].航空学报,2004,25(1):74-78.
猜你喜欢
民用飞机设计与研究(2019年2期)2019-08-05
山西化工(2019年2期)2019-06-05
西南民族大学学报(自然科学版)(2019年2期)2019-05-17
北京汽车(2019年6期)2019-02-12
汽车电器(2018年10期)2018-11-01
电子制作(2017年10期)2017-04-18
电子制作(2017年23期)2017-02-02
光学精密工程(2016年6期)2016-11-07
雷达与对抗(2015年3期)2015-12-09
电测与仪表(2015年24期)2015-04-09