面向精密制造的微材料特性检测机构
2010-03-16 09:21:34陆震
北京航空航天大学学报 2010年3期
陆 震
(北京航空航天大学 自动化科学与电气工程学院,北京 100191)
陈学东
(华中科技大学 机械科学与工程学院,武汉 430074)
何广平
(北方工业大学 机电工程学院,北京 100144)
面向精密制造的微材料特性检测机构
陆 震
(北京航空航天大学 自动化科学与电气工程学院,北京 100191)
陈学东
(华中科技大学 机械科学与工程学院,武汉 430074)
何广平
(北方工业大学 机电工程学院,北京 100144)
微机电系统(MEMS,Micro Electromechanical Systems)在航空航天、汽车、生物医学、环境监控、军事等领域中有着广泛的应用前景.其材料力学性能的测试目前是其性能测试的薄弱环节,它涉及到微位移、精密定位和载荷/位移测量.采用传统“机械”制造技术,由于摩擦、间隙、爬行和多环节传动误差积累等原因而无法实现.为此,提出了一种冗余驱动全柔性并联机构和压电陶瓷驱动器所组成的新型测量平台.在推导 4RRR冗余驱动并联机构运动学逆问题方程的基础上,经过最佳拓扑选择、运动学分析,并基于动力学优化,确定了微位移/精密定位运动平台主要结构尺寸.实验表明:采用该平台,可以满足 MEMS材料力学性能测量所需的微位移和精确定位要求.
微机电系统;冗余驱动;全柔性机构
微机电系统(MEMS,Micro Electromechanical Systems)是一种适于批量制作的、集微型机构、微型传感器、微型执行器以及相应的信号处理和控制、通信接口、电源等微电子器件在一体的能完成特定功能的微系统.EMS技术最初是借鉴上个世纪 50年代的微电子技术,在大规模半导体芯片工艺基础上发展起来的.与微电子系统不同,MEMS涉及机、电、光等多种信号介质和多个物理场,各种微构件通过变形实现运动和功能,其尺度一般在亚微米到毫米级,属于微观或介观的尺度范围.受加工工艺、尺寸效应和表面缺陷等因素的影响,微构件力学性能无法以宏观力学所能解释,它涉及到微流体、微润滑、微观材料力学等基础理论问题,其材料力学性能的研究是个重要的理论问题,包括硬度、弹性模量、屈服强度、断裂强度、疲劳强度等.微构件的尺寸越小,它所表现的尺寸效应越突出,迫切需要方便可靠的测试方法和测试仪器.需要检测的参数主要包括微机械量、微几何量、微材料特性和电参数.其中电参数的检测技术成熟,而微材料特性检测目前是 MEMS测量技术的薄弱环节.这些涉及到微位移、精密定位和载荷/位移测量.定位精度和分辨率从微米、亚微米到纳米,并要求有足够的驱动力、运动范围和控制精度.采用常规的电动机、机构、运动副的传动方式往往由于摩擦、间隙、爬行和多环节传动误差积累等原因而无法实现,必须寻找新型的驱动元件和传动机构.
本文采用冗余驱动的全柔性并联机构和压电陶瓷的驱动器组成了 MEMS材料力学性能测试装置.整个装置由精密定位子系统、载荷/位移测量子系统、试件夹持子系统和测控子系统组成,本文主要讨论精密定位子系统.
1 全柔性机构
上世纪 80年代提出了全柔性机构或称为柔顺机构(comp lian mechanism)的概念[1].它与通常意义下的柔性机构(flexible linkage)研究有本质不同.在柔性机构中,人们考虑的是如何避免或消除因其自身所具有的弹性造成的变形和振动.而在全柔性机构的研究中,人们恰恰关心的是利用机构元素的弹性实现运动和力的传递.其优点是:①整体化或单片化设计可简化结构,免于装配,统计表明,装配成本占整个制造成本的 50%.②无传统运动副构成的机械系统的间隙和摩擦,可实现高精度运动.③无磨损,提高了系统的工作寿命.④免于润滑,没有润滑剂对外界的污染,也没有外界灰尘对机构运转的不利影响.⑤由于取消了轴承等刚度薄弱环节,系统的综合刚度好.全柔性机构可分为集中柔度全柔性机构和分布柔度全柔性机构.采用并联的全柔性机构可以很好地实现 MEMS微机械力学性能测试.全柔性机构的柔性铰链本身有变形误差,并联机构运动链的布置.可以限制这种误差的累积和放大,良好的整体刚度能够保证机构有较高的定位精度和抗扰动能力.并联机构的结构紧凑,这与全柔性机构作为紧密定位系统执行机构的要求相吻合.并联机构的对称结构还可以补偿温度变化和加工等因素引起的误差,从整体上提高系统的运动精度和定位精度,同时对称性结构也便于加工和模块化.而并联机构工作空间小的缺点对全柔性机构是无关紧要的.并联机构在实际运用中,还存在着奇异位形、避障性能差、驱动铰链载荷分配不合理等问题.若在并联机构中采用冗余驱动方式可以较好地解决这些问题.常见的并联机构冗余驱动方式有 2种:①将并联机构的某些被动铰链变为主动铰链;②在并联机构中增加零约束的驱动分支.图 1为2自由度的非冗余驱动并联机构和 2种冗余驱动的并联机构.对于传统的微间隙刚性机构,冗余驱动是难以实现的,必须采用复杂的控制系统和控制策略,解决由于冗余驱动引起的驱动器间的力纷争问题.但是对于微动全柔性机构却是易于实现的,并能显著改善机构的力传递性能.本文以图2所示的 3自由度冗余驱动并联机构作为微材料特性检测的微位移和精密定位系统的机械本体.其设计过程包括最优拓扑选择、运动学建模和模型分析、机构力传递性能优化和机构全柔性化.
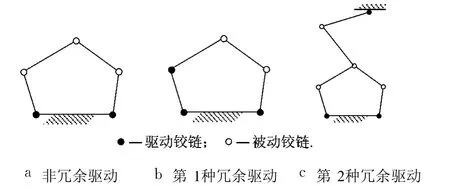
图1 2自由度平面并联机构和冗余驱动并联机构
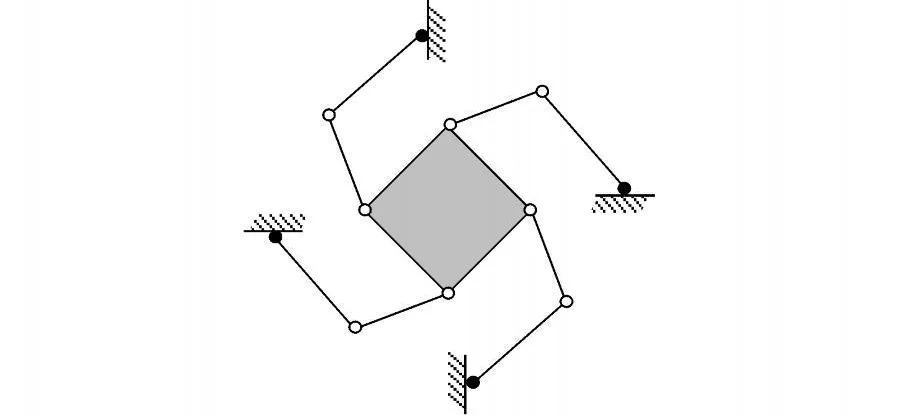
图2 3自由度冗余驱动并联机构
2 最优拓扑选择和运动学模型
上述 4支链平面并联机构由 4个 RRR支链将运动平台和机架连接起来形成.如果各支链的连架铰链均为驱动铰链,如图 2中实心圆所示,则机构为冗余驱动方式.各支链具有 2种构型,如图3中的实线和虚线所示.对于 4个支链应该有 8种不同组合,考虑到对称性,实际上是 4种拓扑构型.由在工作空间中 Jacobian矩阵的条件数计算可知,其中 4支链走向为同一方向的构型,即图 2所示的构型,具有最好的运动各向同性特征[2].图 4为所设计的 4RRR平面冗余驱动并联机构运动简图.为简化设计,取固定平台为正方形,动平台也为正方形,它们的边长为 H和 C.各支链的两个杆长分别为 a和 b.机构的主要参数为:C=H=80mm,a=b=25mm.动平台标志线 OC1与 x轴的初始夹角 β0=82°.冗余驱动机构的运动学正问题方程是超定方程组,即矛盾方程组,是无解的,输入变量必须满足一定的相容条件,才有准确解.与正问题不同,其逆问题是可解的.与动平台相连的铰链为 Ci(i=1,2,3,4)在固定坐标系中的坐标为

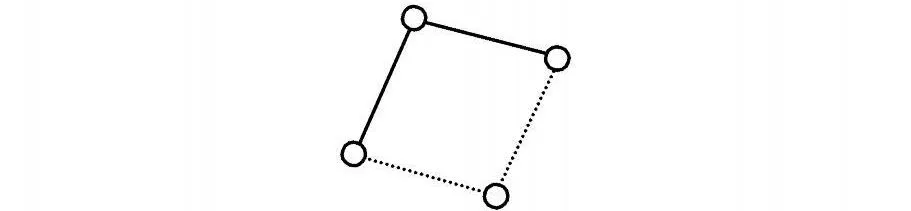
图3 支链的两种装配构型
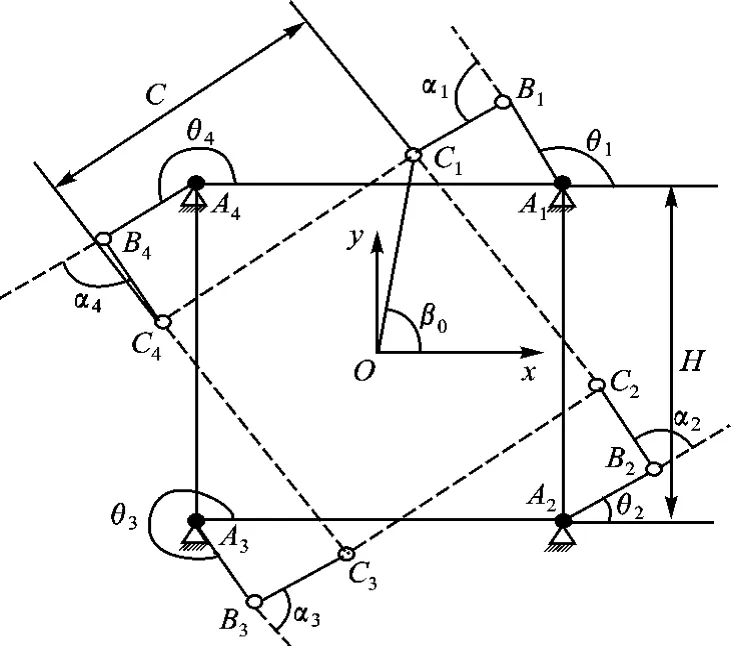
图4 4RRR平面并联机构
若已知动平台的位姿 x,y,β,铰链 Ci(i=1,2,3,4)的坐标还可以表示为

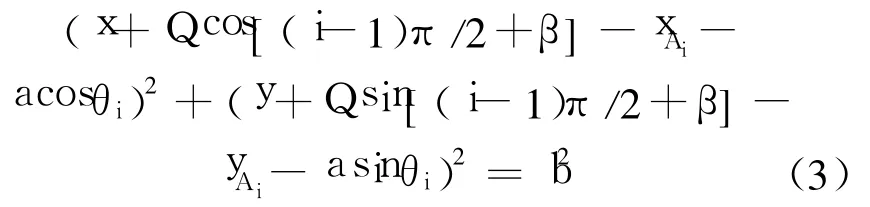
由方程(3)进行机构运动学逆问题位移分析,分别考虑动平台平动和纯转动 2种情况,机构输入角 θ1,θ2,θ3,θ4在各位置的变化分别如表 1和表 2所示.
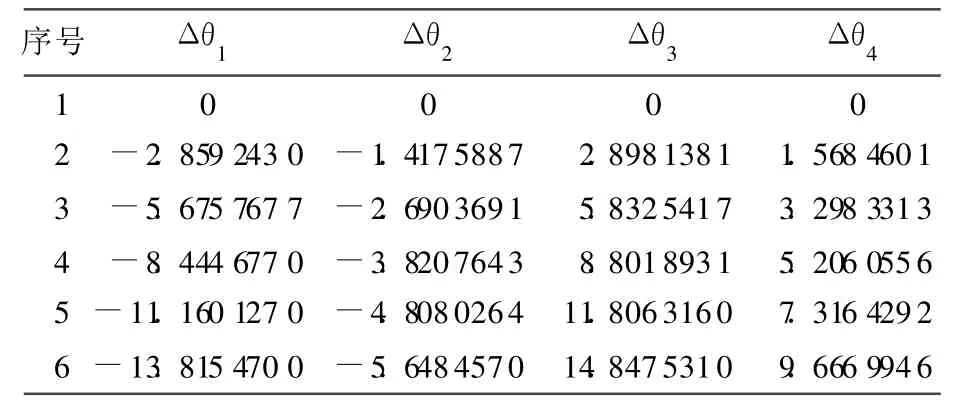
表 1 平台平动 Δx=Δy=2.5mm,Δb=0时各输入角位移 (°)

表 2 平台纯转动 Δx=Δy=0,Δb=5°时各输入角位移 (°)
机构运动位形图如图 5和图 6所示.将式(3)两边对时间求导,可得到机构的速度方程为


图5 动平台平动时机构位形图
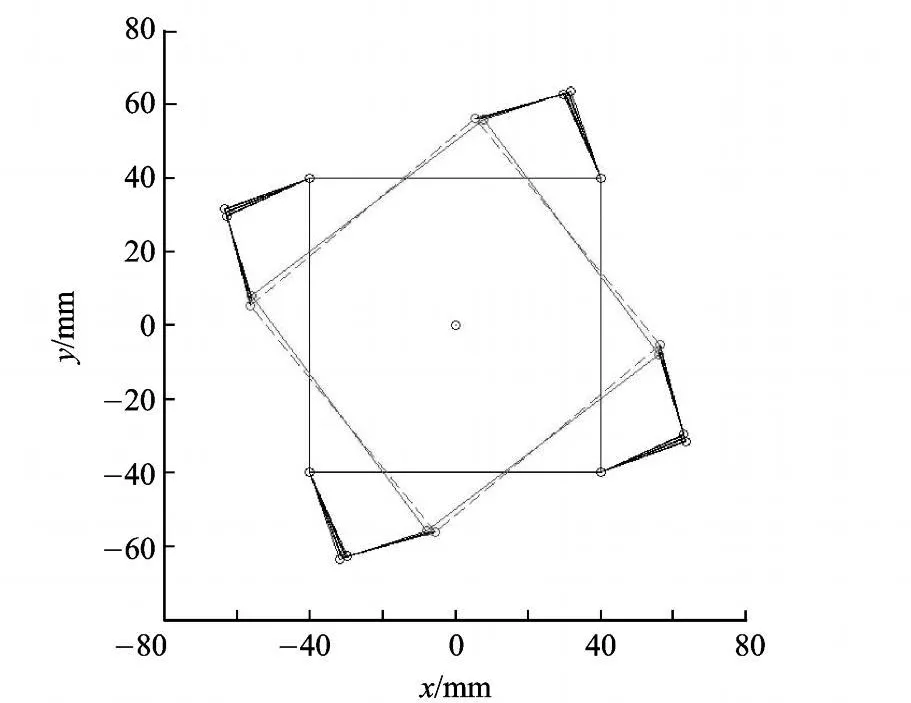
图6 动平台纯转动时机构位形图

在完成上述机构运动学位置逆解问题后,可以由方程(4)得到机构速度正解方程,其中 Jacobian矩阵为

其条件数可以用来优化机构的力传递性能.
3 机构力传递性能优化
机构 Jacobian矩阵的条件数为

可以证明矩阵 J的条件数 0≤cond≤1,同时可用于评价机构的局部运动传递能力和力传递能力,机构在对应于 σmin的方向上的运动传递能力和力传递能力很差[3].因此,优化机构的结构参数,使机构在全工作空间中雅可比矩阵的条件数均最大化是机构优化设计目标.为此构造如下优化模型:

式中,s为整个工作空间;pi为待优化的机构参数;分别为 pi的取值下界和上界.采用遗传算法搜索[4]可得到机构参数的优化结果为 C=H=80mm,a=b=25mm,动平台初始转角 β0=82°.将其做成柔性机构,其外形、实物照片分别如图7、图 8所示 .
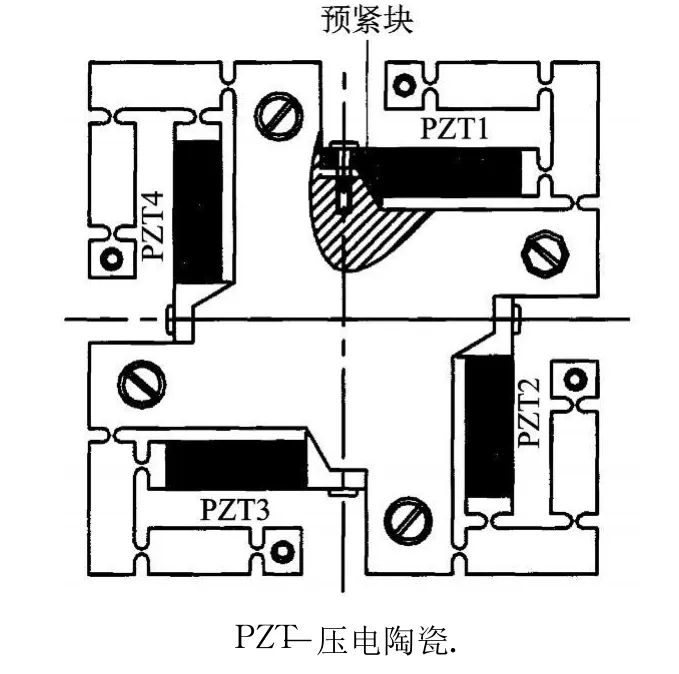
图7 4RRR全柔性机构

图8 4RRR全柔性机构装置实物照片
4 结 论
采用冗余驱动的并联全柔性机构可以满足MEMS系统微位移和精确定位的要求.所需的输入角位移和驱动力可以由压电陶瓷驱动器提供.存在多余分支的冗余驱动并联机构在机构参数相同的条件下,不同拓扑结构具有不同的运动性能.对于结构全对称的平面 4分支 3自由度并联冗余驱动机构而言,各支链旋转方向相同时具有最佳的运动学和力学各向同性特征.为进一步提高冗余驱动并联机构的运动性能,以全局运动学性能评价指标进行了优化,提出的优化数学模型和优化方法可用于其他冗余驱动并联机构的优化设计.
References)
[1]Her I,Midha A.A compliance number concept for compliant mechanisms,and type synthesis[J].ASME Journal of Mechanisms,Transmissions,and Automation in Design,1987,109(3):348-355
[2]范春辉.全柔性机构的优化设计和实验研究[D].北京:北方工业大学机械电子工程学院,2006 Fan Chunhui,Research on optimizing design and experiment of fully compliant mechanism[D].Beijing:College of Mechanical Electronical and Engineering,North University of Technology,2006(in Chinese)
[3]何广平,谭晓兰,张向慧,等.平面全柔性 3-DOF过驱动并联机构的最优综合 [J].机器人,2006,28(6):623-635 He Guangping,Tan Xiaolan,Zhang Xianghui,et al.Optimal synthesis of a planar 3-DOF over actuated full-compliant parallel mechanism[J].Robot,2006,28(6):623-635(in Chinese)
[4]陈国良,王煦法,庄镇泉,等.遗传算法及其应用[M].北京:人民邮电出版社,1996 Chen Guoliang,Wang Xufa,Zhuang Zhenquan,et al.Genetic algorithm and application[M].Beijing:Posts&Telecom Press,1996(in Chinese)
[5]Fimani F,Podhorodeski R P.Force-unconstrained poses for a redundantly-actuated planar parallel manipulator[J].Mechanism and Machine Theory,2004,39(5):459-476
[6]温诗铸.关于微机电系统的研究[J].中国机械工程,2003,14(2):151-163 Wen Shizhu.Researches on the micro-electromechanical system[J].China Mechanical Engineering,2003,14(2):151-163(in Chinese)
[7]周兵,仲昕,杨汝清.平面三自由度并联冗余机构的位置和工作空间分析[J].湖南大学学报:自然科学版,2002,29(2):52-57 Zhou Bing,Zhong X in,Yang Ruqing.Displacement and workspace analysis of 3-d of planar parallel tedundant robot[J].Journal of Hunan University:Natural Science,2002,29(2):52-57(in Chinese)
[8]Merlet JP.Direct kinematics of planar parallel manipulators[C]∥Proceedings of the 1996 IEEE International Conference on Robotics and Automation.Minneapolis,Minnesota:ICRA,1996
(编 辑:刘登敏)
Micro-material-test mechanism oriented precision technique
Lu Zhen
(School of Automation Science and Electrical Engineering,Beijing University of Aeronautics and Astronautics,Beijing 100191,China)
Chen Xuedong
(School of Mechanical Science and Engineering,Huazhong University of Science and Technology,Wuhan 430074,China)
He Guangping
(College of Mechanical Electronical Engineering,North University of Technology,Beijing 100144,China)
Micro electromechanical systems(MEMS)have vast vistas of application in the aeronautics,astronautics,automobile,bioengineering,environmental management,military,etc.However,the material tests are the bottleneck of the property test for MEMS.That is concerned with subtle motion,precision location,and the measurement of tiny load/displacement.Traditional mechanical manufacture is helpless for the mission duo to friction,clearance,crawl,and error-accumulation of multi-trans mission.For this reason,a new type of the redundantly actuated compliant parallel mechanism with piezoelectric actuators was proposed.Based on the inverse kinematics of the redundantly actuated compliant parallel mechanism,and by means of optimum topology,kinematical analysis,and dynamical optimization,the key dimensions of the mechanism were determined.The experiment demonstrates the mechanism is capable in the subtle motion,precision location,and the measurement of tiny load/displace ment for the MEMS material test.
micro electromechanical systems;redundantly actuated;compliantmechanism.
TP 242
A
1001-5965(2010)03-0328-05
2009-03-02
国家重点实验室开放基金资助项目
陆 震(1942-),男,江苏无锡人,教授,zhenluh@buaa.edu.cn.
猜你喜欢
河北省科学院学报(2020年1期)2020-05-25 06:57:18
民用飞机设计与研究(2019年2期)2019-08-05 01:33:44
北京汽车(2019年6期)2019-02-12 05:19:50
制造技术与机床(2018年11期)2018-11-23 01:07:50
汽车电器(2018年10期)2018-11-01 01:17:26
海军航空大学学报(2015年1期)2015-11-11 17:18:37
实用手外科杂志(2015年2期)2015-08-28 09:50:56
饲料博览(2015年4期)2015-04-05 10:34:14
北京航空航天大学学报(2014年1期)2014-12-19 08:58:38
CHIP新电脑(2014年5期)2014-05-14 20:54:03