加速旋转螺旋桨噪声测试水洞试验研究
2010-02-21 05:34冯源陶然卓智海
兵工学报 2010年12期
冯源,陶然,卓智海
(北京理工大学 信息与电子学院,北京100081)
0 引言
近几年来,港口水域内水下攻防技术备受各国关注[1-2]。用于水下监测系统、水声导引头和智能水声引信的水声探测及目标分类识别技术,是研发先进港口水域水下攻防装备的关键技术之一。船只离靠港是港口水域目标的典型运动特征,加速或减速航行是它们必须经历的运动过程。从离靠港船舶的螺旋桨辐射噪声中提取与船只加速度相关水声信号特征是探测及分类港口水域机动目标的有效途径。为获取加速旋转螺旋桨水声信号特征及相应的信号处理算法,研究加速旋转螺旋桨噪声测试的试验方法,并获取加速螺旋桨噪声数据是十分必要的。由于在海中进行试验时,设备和人力成本高昂,且水声环境的影响不易控制,因而初期采用符合国际标准的水洞试验方式是相对经济的,且试验参数易于控制。
众多国内外研究人员对在水洞中应用缩比螺旋桨模型模拟实桨空化噪声的试验进行了研究[3-9]。其中,第18 届国际拖曳水池会议(ITTC)空化委员会提出了进行水洞噪声测试试验的相似准则[3],并成为尔后诸多水洞噪声试验的参照准则[4-7]。然而,现有文献中仅有一些关于水流不稳定时声信号特征的试验研究成果[8-9],而尚未有关于利用模型桨在空泡水洞中模拟实桨加速过程的噪声测试试验方法研究,且尚未获得有意义的加速旋转螺旋桨噪声试验数据。因此,本文讨论了在水洞试验相似准则约束下,模型桨模拟实桨加速工况噪声测试的试验条件,并提出相应的试验工况设计方法。文中还提出了从试验采集的螺旋桨转速脉冲信号中获取起始转速及加速度参考值的方法。对实测的水洞试验数据进行了分析,说明了螺旋桨在近似匀加速状态下辐射噪声与螺旋桨转速的关系,为进一步的试验、信号特征和信号处理方法研究奠定了基础。
1 试验介绍
1.1 水洞介绍
为了研究处于加速旋转状态下的螺旋桨噪声的水声信号特性,在中国船舶研究中心的大型空泡循环水洞进行了加速螺旋桨噪声测量试验。该循环水洞实验段的体积为10.5 m ×2.2 m ×2.0 m,水洞内压力调节范围10~400 kPa,水流速度范围1~15 m/s,流速不均匀度小于±1.0%,湍流度低于3.0%,并具有很低的背景噪声。
水洞实验段的正下方安置了体积为9.5 m ×2.2 m×2.0 m 的水声测量舱,为了减少水流对噪声测量的影响,水洞试验段和水声舱采用有机玻璃进行隔离,计算中可忽略其对声传播的影响。为了减小壁面反射对噪声测量的影响,水声舱的四壁布满消声尖劈。在测量舱底部安装有B&K8015 标准水听器及B&K2635 放大器。以上这些性能指标使得该水洞十分适合于进行螺旋桨空化噪声测量测试。
1.2 试验模型介绍
由于该水洞庞大的容积,可以开展整船模型带推进器的噪声测量试验,模拟伴流场更加接近于实船真实流场[7]。带舵的某型集装箱船模主要参数如表1所示。在整船模型的船尾,安装有为该集装箱船设计的五叶缩比模型桨,以产生试验中的目标声源,其主要参数如表2所示。
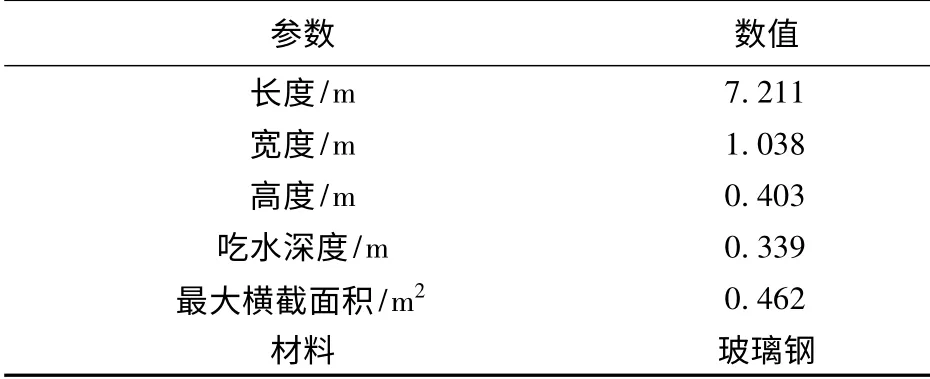
表1 整船模型参数Tab.1 Hull model parameters
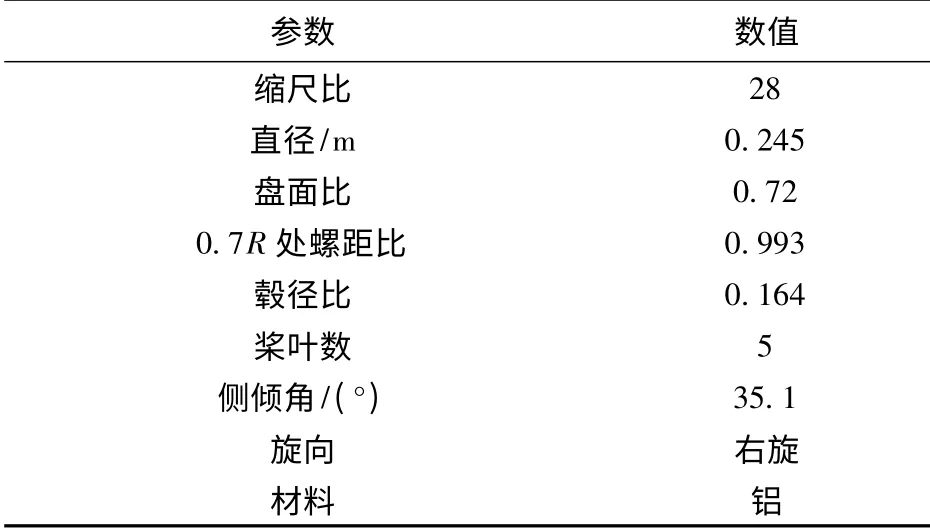
表2 模型桨参数Tab.2 Model propeller parameters
带舵的整船模型安装螺旋桨的实物图如图1所示。噪声测量试验的配置如图2所示。

图1 整船模型带螺旋桨实物图Fig.1 Photograph of hull model with model propeller
2 试验方法
2.1 试验条件
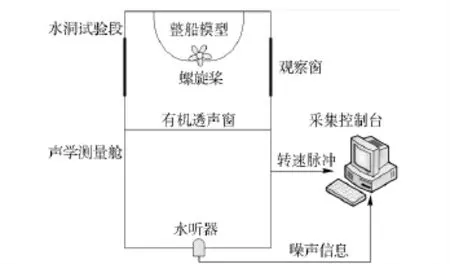
图2 试验配置Fig.2 Experimental setup
根据ITTC 建议的试验准则及中国船舶研究中心提供的试验指导,在水洞中进行模型桨模拟实桨加速过程噪声测试时,需要遵守的相似准则是[3-4]:
1)几何相似:按缩尺比1∶28 制作的船体模型、螺旋桨模型保证了模型与实体的几何相似,且强度、刚度满足试验要求。
2)螺旋桨0.7R 处雷诺数超过临界雷诺数Rn(0.7R),
式中:va是螺旋桨前进速度;C0.75R是0.75R 处桨叶切面弦长;R 为半径;n 为螺旋桨转速;D 为螺旋桨直径;ν 是水的运动粘滞系数。
3)推进器的负荷系数KT相等,即

式中:ρs是海水的密度;ρm是水洞中水的密度;Ts是实桨推力;Tm是模型桨推力;Ds和Dm分别是实桨和模型桨的直径;ns和nm分别是实桨和模型桨的转速。
4)模型桨轴线正上方0.9R 处的空泡数σ(0.9R)m和实船空泡数σ(0.9R)s相等:

式中:Pa是大气压;hs是实桨桨轴中心沉深;P0是水洞中的压力调节值;γ 是水的重量密度;h0.9R是0.9R半径剖面在12 点钟位置的深度;pv是水的饱和蒸汽压。
当模拟螺旋桨加速旋转状态时,首先可认为对于实船和水洞试验,在较短的加速时间间隔内,环境参数不会发生变化,即Pa、P0、ρm、ρs、γ、pv、v 为常数;并可认为实桨和模型桨的吃水深度不变,即h0.9R和hs为常数。另外由于螺旋桨的几何参数Ds、Dm、C0.75R是恒定的,因此式(6)和式(7)可以写成:

式中:cs和cm为常数。从式(8)和式(9)可以得出:当实桨和模型桨的起始转速能够使式(5)成立,则当ns和nm成比例增长时,可以满足等空泡数的条件。
由于船舶通常具有较大的惯性,因此我们可以认为在船舶螺旋桨相对短暂的加速过程中,船速是近似不变的,即va是常数。因此在螺旋桨加速旋转时,若模型桨起始转速满足相似准则的要求,则整个加速过程均可满足雷诺数大于临界雷诺数的要求。
考虑到船舶加减速时通常船速和螺旋桨转速都对应相应的档位,且各个档位的进速比J =va/nD 的设计值往往都落在螺旋桨特性曲线(KT-J 曲线)的线性段上,且远离非线性段的一端[10]。因此当va是常数时,即使转速在一定范围内的增长,仍能使负荷系数与进速比保持线性关系。所以,在利用模型桨模拟实桨工况时,若能满足假设条件:螺旋桨加速旋转过程中,转速的提高不会使KT的值落在KT-J 曲线的非线性段上,则式(3)和式(4)可以写成:

式中:as、am、a's和a'm均为固定的比例系数。因此,若实桨和模型桨的起始状态能够满足式(2),则当ns和nm成比例增长时,可以满足等负荷系数的准则。
根据以上的分析,在水洞中进行模型桨模拟实桨加速状态下的噪声测试试验时,为符合水洞试验相似准则的要求,应该满足的试验条件是:
1)试验中,模型桨起始状态的试验参数应该满足式(1)、式(2)、式(4)和式(5),即模型桨起始状态可预报到实船的某较低速工况;
2)试验中水流速度保持不变,模拟实桨加速而实船航速尚未来得及提高的过程;
3)试验中及实船工况下的环境参数保持不变,且桨轴深沉不变,即使式(8)和式(9)成立;
4)保证模型桨与实桨的负荷系数值在螺旋桨特性曲线的线性段范围内增加,并且模型桨与实桨转速等比例增长,即使式(10)和式(11)成立。
其中,第2)~3)项的试验条件在较短的加速时间间隔内与实际情况是近似相符的,第1)和4)项可以通过试验工况设计实现。
2.2 试验工况设计
根据2.1 节中总结的试验条件,加速螺旋桨水洞噪声测试试验的工况设计步骤为:
第1 步:根据实船的一个较低速的测试点工况,通过式(2)至式(7)计算起始试验参数,包括:水流速度、压力调节值和模型桨起始转速,并保证试验流速和模型桨转速能够满足式(1)超过临界雷诺数的要求。
第2 步:计算螺旋桨转速允许增加的范围。通过各自的KT-J 曲线确定其线性段对应的最小的进速系数值J'm及J's.再根据模型桨及实桨的负荷系数与转速的关系,计算此模型桨的最大目的转速

式中:vs是实船的航速;n's=vs/J'sDs是实桨的最大允许转速。
第3 步:保持压力和水流速度不变,均匀地调节控制台的螺旋桨转速控制旋钮,提高螺旋桨的转速且不超过n'm,这样就可以通过模型桨在水洞中的加速试验模拟了实桨加速工况,并进而获得有效的加速螺旋桨噪声水洞试验数据。
3 试验结果及数据分析
3.1 试验工况
本次试验模拟的某集装箱船的3 个起始工况的参数如表3所示。按照上文所述试验工况设计步骤,并根据此工况下给定的实桨推力Ts及动力仪测得的模型桨推力Tm,通过式(2)~式(7)计算得到水洞试验螺旋桨起始参数也示于表3。
将表3中各个工况的螺旋桨起始试验参数带入式(1),可以满足大于临界雷诺数的要求。由于通常出于船舶推进系统安全性等方面的考虑,其螺旋桨在加速过程中可认为转速的提高是近似均匀的,因此在试验中均匀提高模型桨的转速至目的转速,从而完成螺旋桨匀加速旋转过程的模拟。在不同的工况下并分别进行多次试验,以获得多组试验数据。

表3 模拟工况及试验参数Tab.3 Simulated operation condition and test parameters
3.2 转速参考值的获取方法
水洞试验设备可输出水流速度、水听器采集信号及螺旋桨转速3 路模拟信号,均通过采样频率Fs=108.696 kHz 的采集卡采样,每次采集数据的时间为10 s.其中水流速度以电压表示,且其数值与螺旋桨转速无关,可以直接换算获得。
而螺旋桨转速并非直接输出,而是每旋转一圈,由螺旋桨动力仪产生256 个脉冲,从而形成连续的脉冲串信号,如图3所示为0.005 s 内的转速脉冲串信号。

图3 螺旋桨转速脉冲信号Fig.3 Rotation pulse signal of the propeller
通常螺旋桨水洞试验中转速是固定的,可以通过计算固定时间内脉冲个数以换算得到转速参考值,此时由于脉冲重复周期固定,转速测量精度可得到保证;而当螺旋桨加速旋转时,脉冲重复周期不断变短,仍采用这样的计算方法精度也随之变化。为此,采用螺旋桨每旋转固定的角度所经历的时间进行换算,此时时间精度为采样间隔,不仅精度值固定且精度更高,同时也不会带来运算量的增加,因此是更好的获取螺旋桨转速与时间关系曲线(n-t 曲线)的方法。之后,再基于最小二乘准则拟合n-t 曲线,以获取起始转速和加速度的参考值。获取加速螺旋桨转速信息的实现步骤为:
1)求出脉冲信号p(k)的中值Am,并计算pm(k)=p(k)-Am;
2)逐点扫描pm(k),通过判断pm(k)/pm(k -1)的正负以确定pm(k)是否过零,每过2 次零点计为一个脉冲;
3)每计64 个脉冲,计算扫描的采样点数Np,以求出螺旋桨每旋转90 度所经过的时间Tp=Np/Fs,并换算得到该段时间的平均转速vR=1/8Tp;
4)重复步骤3),以获得整个采集时间内的n-t曲线;
5)分别截取螺旋桨匀速、加速时间段的n-t 曲线,根据文献[11]中的计算方法,运用最小二乘准则拟合n-t 曲线。匀速段拟合阶次取1,加速段拟合阶次取2,从而得到螺旋桨的起始转速、目的转速和加速度参考值。
图4所示为计算得到的某次试验的n-t 曲线。多次试验的n-t 曲线最小二乘拟合结果与试验数据分析结果一起列于表4中以进行对比。

图4 加速螺旋桨转速-时间曲线Fig.4 Rotation speed-time curve of accelerating propeller
3.3 采集数据分析
在水洞中模拟实桨加速过程的试验目的是为了研究提取加速旋转螺旋桨水声信号特征的方法,因而在满足水洞试验相似准则的前提下,主要关心的是试验数据所反映出的水声信号变化规律,即所采集的数据能否反映螺旋桨转速及其变化信息。被动水声探测系统通常利用噪声调制包络分析[12](DEMON)方法提取螺旋桨的转速特征,因此分别计算得到试验数据的DEMON 图,如图5所示。
DEMON 图体现了宽带螺旋桨噪声幅度调制包络的时频分布,由于的模型桨各桨叶间空化程度比较均匀,因此从图5中可以看到输出结果中仅叶频分量显著,而通常情况下,螺旋桨的一个叶片要比其他叶片空化剧烈[10-11],在轴频及其各次谐波处也有相应的谱线。图5说明在加速段调制信号的叶频分量频率是随时间近似线性增加的。
对DEMON 图所表征的加速段部分作Radon 变换,可以提取图谱上的线谱成分。图5的Radon 变换输出如图6所示。
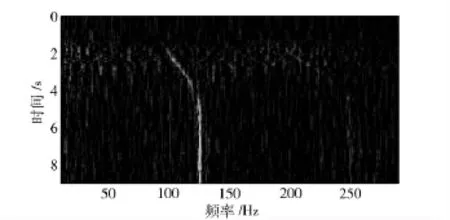
图5 实测加速螺旋桨噪声的DEMON 图Fig.5 DEMON spectrogram of measured propeller noise

图6 加速螺旋桨噪声DEMON 图的Radon 变换结果Fig.6 Radon transform of the DEMON spectrogram
分别求采集的3 个工况6 次试验数据DEMON图的Radon 变换,以其输出的峰值所对应角度的正切值估计得到螺旋桨轴频加速度,将估值与参考值在表4中对比列出:

表4 螺旋桨转速参考值与加速度估值对比Tab.4 The comparison of nominal value and estimated result for the propeller rotation speed
表4的对比结果表明,采用Radon 变换识别DEMON 图上调制包络变化率的结果接近于转速加速度参考值,说明加速螺旋桨水洞噪声测试试验所获取的数据能够反映出转速变化率的信息,因而能够为进一步研究加速状态下螺旋桨辐射噪声的水声信号特征及特征提取算法提供有力的支撑。
4 结论
本文开展了模型桨模拟实桨加速过程的噪声测试水洞试验研究,获得的主要结论有:
1)获得了加速旋转螺旋桨噪声测试水洞试验条件与工况设计步骤,从而可通过水洞试验获取能反映实桨加速状态下辐射噪声特性的有效试验数据;
2)提出了从螺旋桨动力仪输出脉冲信号中获取转速参考值的方法,且测量精度不受脉冲重周期变化的影响,固定为采样间隔;
3)采用Radon 变换识别对加速旋转螺旋桨试验数据DEMON 图的分析结果表明,螺旋桨噪声调制包络频率的变化率等于螺旋桨旋转加速度,有助于进一步研究螺旋桨在加速状态下的水声信号特征及其提取算法。
References)
[1]James S,Warren D,Meggitt D.Navalmaritime security test and evaluation site (NMSTES)[C]∥Proc MTS/IEEE OCEANS.Washington D.C:2005:1841 -1843.
[2]Johnson E.Unmannedundersea vehicles and guided missile submarines:Technological and Operational Synergies[D].Occasional Paper No.27,2002.
[3]ITTC.Cavitation committee report[C]∥Proc of 18th ITTC.Kobe,1987:183 -186.
[4]张永坤,熊鹰.船舶螺旋桨空泡噪声研究[J].舰船科学技术,2008,30(4):54 -60.ZHANG Yong-kun,XIONG Ying.A review of ship propeller cavitaion noise[J].Ship Science and Technology,2008,30(4):54-60.(in Chinese)
[5]Park C,Seol H,Kim K,et al.A study on propeller noise source localization in a cavitation tunnel[J].Ocean Engineering,2009,36:754 -762.
[6]Atlar M,Takinaci A C,Korkut E,et al.Cavitationtunnel tests for propeller noise of a FRV and comparisons with full-scale measurements[C]∥Proc of the 4th International Symposium on Cavitation.Pasadena:2001:1 -13.
[7]WANG Tian-kui,LU Fang,FAN Xiao-bing,et al.A new large cavitation channel in China ship scientific research center[J].Journal of Hydrodynamics Ser B,2003,15(4):59 -62.
[8]Duttweiler M,Brennen C.Experimental investigation ofan instability on a cavitating propeller[C]∥Proc of FEDSM'99.San Francisco,1999:1 -7.
[9]Duttweiler M,Brennen C.Surge instability on a cavitating propeller[J].J.Fluid Mech,2002,458:133 -152.
[10]Ross D.Mechanics of underwater noise[M].3rd Edition.Los Altos:Peninsula Publishing,1983:253 -285.
[11]Kummert A.Fuzzy technology implemented in sonar system[J].IEEE J Oceanic Eng,1993,18(4):483 -490.
[12]王广斌,刘义伦,金晓宏,等.基于最小二乘原理的趋势项处理及其MATLAB 的实现[J].有色设备,2005,(5):4 -8.WANG Guang-bin,LIU Yi-lun,JIN Xiao-hong,et al.Treatment of tendency part and its MATLAB accomplishment based on leastsquare principle[J].Non-ferrous Metallurgical Equipment,2005,(5):4 -8.(in Chinese)
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年20期)2022-11-28
航空发动机(2020年3期)2020-07-24
小学生优秀作文(低年级)(2019年6期)2019-07-01
中学科技(2017年10期)2017-11-04
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
创新作文(1-2年级)(2014年5期)2014-07-19
大众考古(2014年4期)2014-06-26
中国舰船研究(2014年1期)2014-05-14