
基于Matlab/simulink对直流电机拖动系统的仿真
2010-02-20 07:42郑则炯
装备制造技术 2010年5期
郑则炯
(广东轻工职业技术学院 机电工程系,广东 广州 5103000)
随着科学技术的发展,当今的控制系统研究分析,仅靠人工计算已不能满足要求,已逐步趋向于计算机辅助设计,主要利用Matlab高级语言对控制系统进行计算机分析。本文以研究直流电机拖动系统为例,通过Matlab平台对控制系统传递函数的稳定性分析,并通过Simulink对其仿真验证,结果得出的结论是:线性系统是稳定的,单位阶跃响应是一致的。所以Matlab的出现,给控制系统的分析提供了极大的方便。
1 直流电机控制系统模型
假设系统对输入u1(t)信号的响应为y1(t),而对u2(t)输入信号的响应为y2(t),若对任意的常数a和b,系统对输入信号au1(t)+bu2(t)的响应,可以表示成ay1(t)+by2(t),则称系统是线性的。本文假设的直流电机拖动系统就是个线性系统,功能方框图如图1。
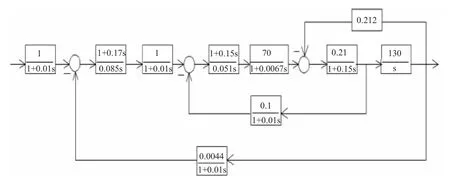
图1 直流电机系统的功能方框图
2 运用Matlab软件建立系统的传递函数
Matlab程序为
>>g1=tf(1,[0.01,1]);g2=tf([0.17,1],[0.085,0]);g3=g1;
g4=tf([0.15,1],[0.051,0]);g5=tf(70,[0.0067,1]);
g6=tf(0.21,[0.15,1]);g7=tf(130,[1,0]);g8=0.212;
g9=tf(0.1,[0.01,1])*inv(g7);g10=0.0044*g1;
gg1=feedback(g7*g6,g8);gg2=feedback(gg1*g5*g4,g9);
G=feedback(gg2*g3*g2,g10)*g1;zpk(minreal(G))%零极点显示
Zero/pole/gain:
111 852 502 194.907 8(s+6.667)(s+5.882)
(s+180.9)(s+84.12)(s+48.21)(s^2+15.16s+74.33)(s^2+27.57s+354)
2.1 系统的稳定性分析
调用的Matlab程序为
>>g1=tf(1,[0.01,1]);g2=tf([0.17,1],[0.085,0]);g3=g1;
g4=tf([0.15,1],[0.051,0]);g5=tf(70,[0.0067,1]);
g6=tf(0.21,[0.15,1]);g7=tf(130,[1,0]);g8=0.212;
g9=tf(0.1,[0.01,1])*inv(g7);g10=0.0044*g1;
gg1=feedback(g7*g6,g8);gg2=feedback(gg1*g5*g4,g9);
G=feedback(gg2*g3*g2,g10)*g1;%总系统模型
bode(G);%绘制 Bode图
figure;nyquist(G);%绘制Nyquist图
得到系统的Bode图和Nyquist图,分别如图2和图3。

图2 系统的Bode图

图3 系统的Nyquist图
由上面系统的Bode图和Nyquist图可以判断,该系统是线性稳定的。
2.2 系统单位阶跃响应及脉冲响应
调用Matlab程序为
>>step(G),axis([0,1,0,400]);
impulse(G),axis([0,1,0,3000]);
得到的系统单位阶跃响应和脉冲响应,如图4和图5所示。

图4 系统单位阶跃响应

图5 系统脉冲响应
3 运用Simulink对直流电机控制系统进行仿真

图6 系统仿真模型图
键入Simulink命令后,打开系统模型库,在建立M—file文件中直接加入所需要的模块,该系统的仿真模型及仿真阶跃响应如图6所示。为了使得到较满意的效果,可以调整外环的PI控制器参数(αs+1)/0.085s,假设分别选择 α =0.17,0.3,0.5。启动simulink(如图7所示)。从阶跃仿真的结果来看,如果选择PI控制器为(0.17s+1)/0.085s,则能得到较满意的效果。

图7 仿真阶跃响应
4 结束语
以上结合直流电机控制系统实例总结了Matlab在控制系统中的应用,可以看到Matlab为系统分析提供了极大的方便,是研究控制系统的强有力的工具。因此,将Matlab应用于自控原理中,使Matlab语言和自动控制原理的内容有机地结合在一起,为科研人员和工程技术人员提供了一种新的研究手段。
[1]薛定宇,陈阳泉.基于MATLAB/Simulink的系统仿真技术与应用[M].北京:清华大学出版社,2008.
[2]王正林,王胜开,陈国顺,王琪.MATLAB/Simulink与控制系统仿真(第2版)[M].北京:电子工业出版社,2008.
[3]何衍庆,姜捷,江艳君,等.控制系统分析、设计和应用[M].北京:化学工业出版社,2003.
[4]胡寿松.自动控制原理(第5版)[M].北京:科学出版社,2007.
[5]李国勇,谢克明.控制系统数字仿真与CAD[M].北京:电子工业出版社,2003.
[6]耿道霞,刘家彬.基于Matlab的Simulink仿真环境在控制系统设计中的应用[J].电脑知识与技术,2007,(14):519-520.
[7]韩芝侠.基于Matlab/Simulink仿真的电力电子实验系统设计与实现[J].陕西理工学院学报(自然科学版),2008,24(2):26-3O.
[8]邢国泉,但汉久.基于Matlab的控制系统分析[J].现代电子技术,2009,(16):153-154.
[9]林盾,李建生.基于simulink的线性系统仿真设计与性能分析[J].湘潭师范学院学报(自然科学版),2009,31(2):74-77.
[10]刘川,刘景林.基于Simulink仿真的步进电机闭环控制系统分析[J].测控技术,2009,28(1):44-49.
猜你喜欢
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年12期)2022-07-05
化工自动化及仪表(2021年6期)2021-11-26
上海大中型电机(2021年1期)2021-06-09
天津教育·下(2018年9期)2018-07-13
自动化仪表(2017年8期)2017-08-30
电子制作(2017年1期)2017-05-17
演艺科技(2016年11期)2016-12-24
电子制作(2016年1期)2016-11-07
中国舰船研究(2015年2期)2015-02-10
