半船移位受力分析及运动仿真研究
2010-01-28 02:32,,,
船海工程 2010年4期
,,,
(1.江苏科技大学 船舶与海洋工程学院,江苏 镇江 212003;2.上海外高桥造船有限公司,上海 200137)
大型造船企业为了提高船坞的利用效率,采用串联造船法,即在船坞首端建造第一艘船的同时,在船坞的尾端建造第二艘船的尾部,待第一艘船下水后,将第二艘船尾部移至船坞的首端,继续吊装其他分段建造整艘船体。与此同时,建造第三艘船的尾部,依此类推。上述船坞串联造船法要求船坞长度大于1.5倍船长,即船长方向要保证能够同时串联放置一艘半在建船舶。上海外高桥造船有限公司的2号船坞长360 m,宽76 m。建造载重量17.5万t散货船的总长约为280 m,型宽约45 m,坞长大于船长,但不足1.5倍,坞壁与船艏之间实际工作间隙约为60 m,无法采用纵向串联造船法。而将串联建造的第二艘半船在垂直于第一艘的方向装配建造,便形成了横向半串联造船法。横向半串联造船法对于船舶装配具有与纵向串联造船法相同的益处,同串联造船法一样也有一个半船平移的过程,不同之处在于半串联造船法还多了一个半船旋转过程,见图1。
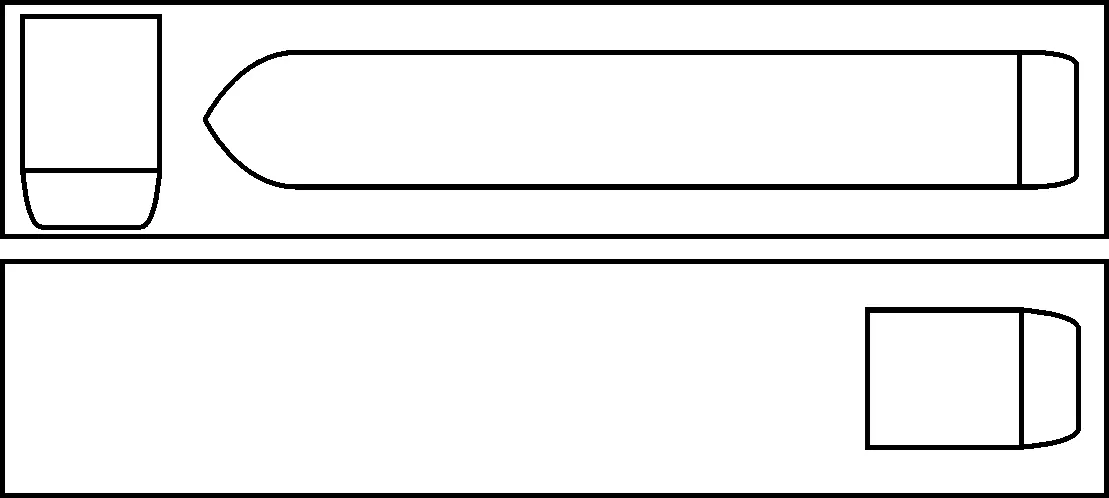
图1 半串联造船船坞布置示意图
为确保半串联造船法中移位的成功实施,建立半船受力模型,应用仿真计算软件,对半船的起浮、转向、平移、落墩过程进行数学仿真分析,求出半船所受外力随时间及旋转角度变化的情况,直观地描述半船平移及旋转过程,为安全生产提供理论保障。
1 仿真方法及计算工具的选取
在实际半船移位过程中,半船运动轨迹具有较大的随意性,不便于展开分析。为此,将半船移位过程分解为旋转和平移两个主要阶段。移位过程在坞内完成,不需要考虑潮流的影响,外力只考虑拖船的拖力和坞内海水的作用力,忽略风载影响。利用ADAMS可对半船运动情况进行计算机仿真,但由于ADAMS主要面向机械构件的运动仿真,没有涉及流体的动力分析求解,为使仿真更加接近实际状况,近似将半船转动和平移过程都看成是在拖船拉力和水阻力的作用下匀速进行的。先利用流体力学仿真软件计算求得半船移位过程中受到的水阻力,进而求得半船移位过程中的拖轮拖力,仿真出移位过程[1]。
半船转动过程中所受水阻力作用复杂,求解困难,采用计算流体动力学(computational fluid dynamics,CFD)思想求解[2]。利用FLUENT软件对半船以一定角速度匀速转动过程中所受水的阻力进行求解计算。考虑到计算效率,采用船舶初步设计软件MAXSURF的Hullspeed模块来求解半船平移过程中所受水阻力作用值[3]。
2 仿真过程及结果
依据上海外高桥造船有限公司提供的半船、拖船、船坞等实体的尺度,分别在ADAMS、FLUENT和MAXSURF中进行建模。
在利用FLUENT计算半船旋转过程中水阻力时,设定计算工况:半船吃水6 m,在计算中水上部分可忽略不计,旋转角速度3 600 rad/s。选取计算步长0.3,迭代4 000次。采用分区非结构三角网格划分方法。船的原始状态见图2,逆时针方向旋转。
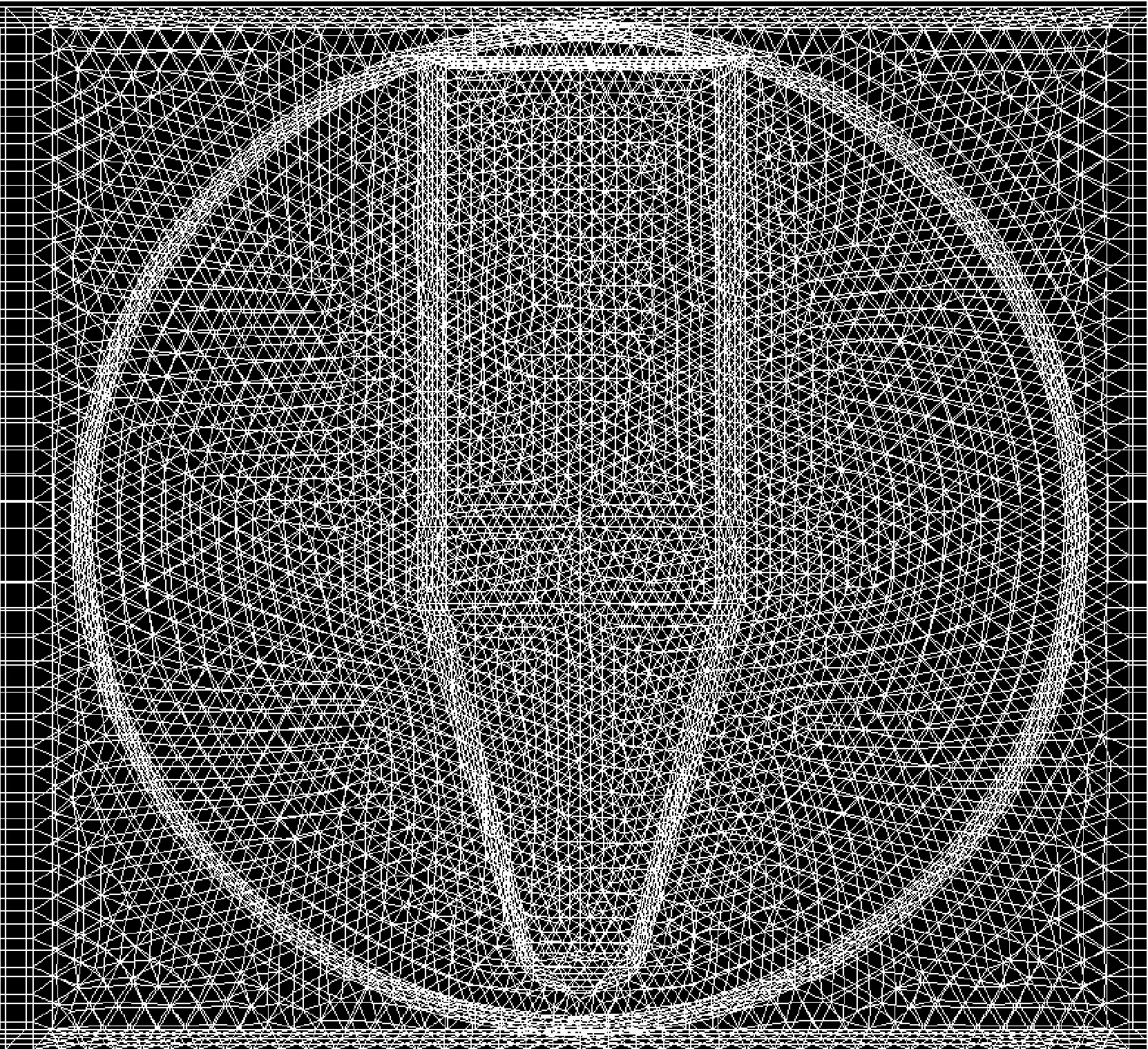
图2 计算网格图
计算得到的等值线见图3~6,反映了不同时间船体表面流场的动压和速度分布情况。

图4 旋转60 s的速度等值线
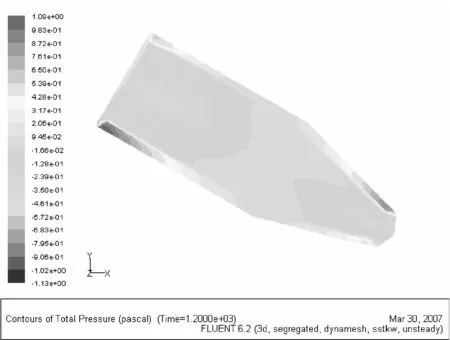
图5 旋转1 200 s的总压力等值线
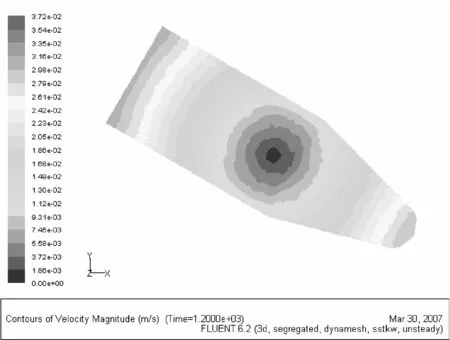
图6 旋转1 200 s的速度等值线
从图3~6可以看出,最后的计算结果是比较合理的。力矩见图7。
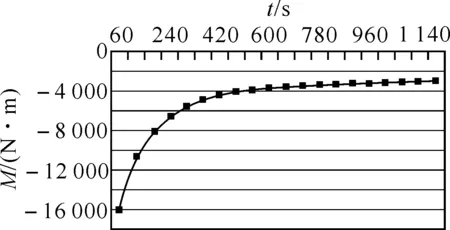
图7 力矩随时间的变
利用MAXSURF软件对半船以一定速度匀速平移过程中所受水的阻力进行求解计算。设定的计算工况的是:吃水6 m,水上部分在计算中忽略不计,半船平移速度u=0.014 m/s。计算得到直航阻力为80 kN。
半船移位仿真中将旋转过程分为两个阶段仿真:第一阶段由拖船拖动半船尾端进行旋转;第二阶段拖船运动到半船右侧,由拖船顶推半船旋转至90°时停止,旋转过程完成。接下来便是拖船牵引直航和定位落墩。移位仿真过程见图8~9。
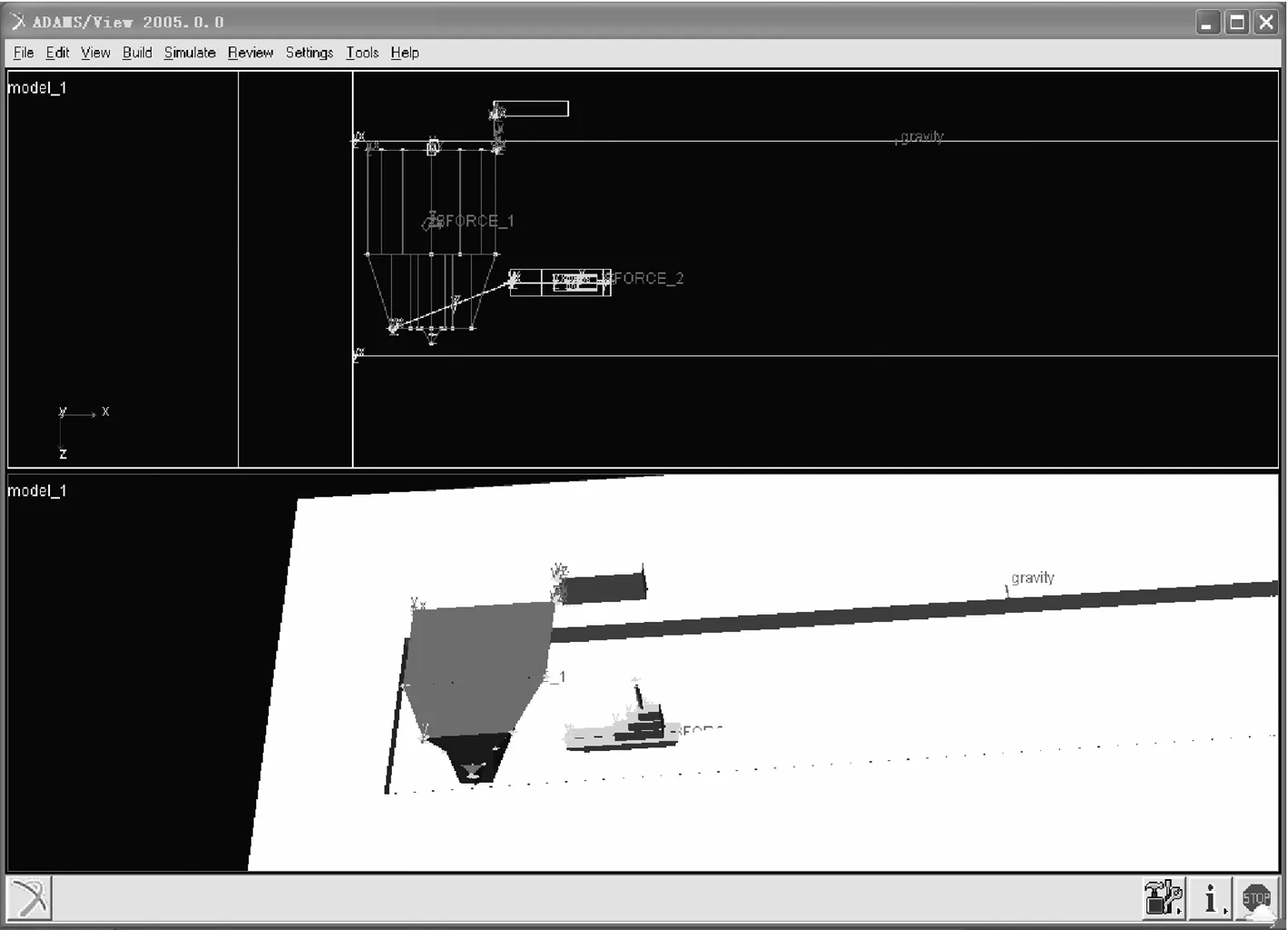
a) 初始状
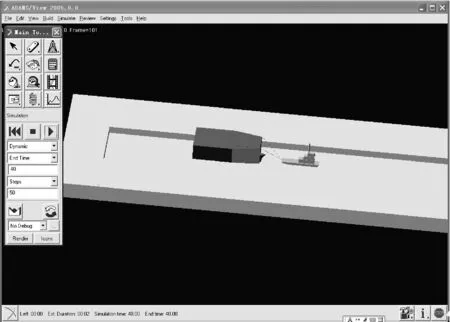
图9 半船平移仿
在半船平移并成功定位落墩后,船坞横向半串联建造法中最重要的环节——半船的移位过程就此完成,继续吊装其他分段即可完成整艘船体的建造。在移位过程中,拖船作用力最大值出现在旋转过程中,为186.65 kN。
3 结束语
通过仿真结果可以清晰地看到,上海外高桥造船有限公司的半串联船坞建造法是切实可行的。研究成果将为实际移位过程确定拖轮牵引力及拖轮主机马力提供理论依据。通过对半船移位全过程的仿真,可以较为精确地绘制出半船各部位的运动轨迹,对实际移位过程中优化移位轨迹,避免移位过程中磕碰坞壁有很好的借鉴作用。
[1] 郑 凯,胡仁喜,陈鹿民,等.ADAMS 2005机械设计高级应用实例[M].北京:机械工业出版社,2006.
[2] 范成建,熊光明,周明飞.虚拟样机软件MSC.ADAMS应用与提高[M].北京:机械工业出版社,2006.
[3] 蒋毅文.Maxsurf 及相关设计程序在船舶设计中的应用[J].船海工程,2005(4):38-41.
猜你喜欢
地理空间信息(2022年6期)2022-07-04
中国船检(2021年8期)2021-11-21
矿山测量(2020年6期)2021-01-07
珠江水运(2020年21期)2020-12-01
珠江水运(2020年16期)2020-09-16
物探与化探(2020年2期)2020-04-22
中国水运(2017年4期)2017-04-26
经营管理者·下旬刊(2016年6期)2016-08-13
考试·教研版(2013年11期)2013-09-26
中国船检(2011年10期)2011-08-04