永磁同步电机负载转矩观测器
2010-01-16 00:58:26郑泽东李永东MauriceFadel
电工技术学报 2010年2期
郑泽东 李永东 肖 曦 Maurice Fadel
(1. 清华大学电力系统及发电设备控制和仿真国家重点实验室 北京 100084 2. 法国图卢兹国家理工学院INPT-ENSEEIHT LAPLACE-CNRS实验室 图卢兹 31071)
1 引言
永磁同步电机具有功率密度高、功率因数高、控制性能优越等特点,因此在高性能控制领域得到了越来越广泛的应用,如数控机床、机器人等。永磁同步电机高性能闭环控制需要转子位置和转速信息,通常需要在转子上安装机械传感器。机械传感器输出一般为位置信号,如旋转变压器和光电码盘等,受分辨率的限制,存在位置的量化误差。转速的直接测量一般采用测速发电机,在实际中应用的比较少。
传统的转速和位置测量方法中,位置直接采用机械传感器的输出,转速一般由位置的微分得到。受机械传感器对转子位置测量分辨率和量化误差的影响,直接微分得到的速度量往往含有很大的微分噪声,所以常常使用一个滑动平均或低通滤波器,但是这样又会造成动态过程中速度测量的相位延迟,影响系统的动态响应速度[1],而用状态观测器来根据机械传感器的测量值观测转子位置和转速是一个很好的解决方案[2]。
永磁同步电机闭环控制中,传统的转速控制器的设计都是假设负载转矩扰动为零或固定值,由此得到转速的实际值和参考值之间的传递函数,以优化这个闭环传递函数为目的得到控制器的设计方案。但是当负载转矩发生变化时,这个控制器并不能同时很好地抑制负载扰动,而引入负载转矩的前馈补偿形成二自由度控制器是一个很好的解决方案。负载转矩的直接测量成本较高,并且受仪器精度和响应速度的影响较大,因此负载转矩观测器就成为一个很好的选择。由于电机运动方程中包含负载转矩,所以一般把转子位置和转速的观测和负载转矩的观测结合在一起,仍然称之为负载转矩观测器。一般来说,负载转矩的观测有直接计算法、全阶及降阶Luenberger观测器、模型参考自适应法和Kalman滤波器等。Kalman滤波器可根据状态变量估计的误差、测量噪声和系统噪声的统计特性等来自动计算最优的反馈增益系数,相对于普通的Luenberger观测器,Kalman滤波器对测量误差和干扰等的抑制能力比较强[3-6]。
利用观测的负载转矩,可以形成对参考转矩的前馈补偿。文献[7]中对采用观测的负载转矩形成前馈补偿的系统的稳定性进行了分析。文献[8-9]指出在控制器中引入观测转矩的前馈补偿,形成二自由度控制器,可以提高控制器的响应速度和鲁棒性。文献[6,10]通过仿真和实验验证,指出在同样的负载转矩冲击下,引入前馈补偿后转速的波动大大减小。
本文提出了用状态观测器的方法来处理机械传感器的输出信号的方法,用状态观测器代替直接微分算法来观测转子位置和转速。通过仿真分析了传统的 Luenberger观测器的局限,最终选择 Kalman滤波器来实现最优的状态观测器,并且用观测的转子位置代替机械传感器测量的离散值,用观测转速代替微分计算值,用观测转矩作为前馈补偿形成二自由度转速控制器,提高了系统的控制性能。
2 Luenberger负载转矩观测器模型
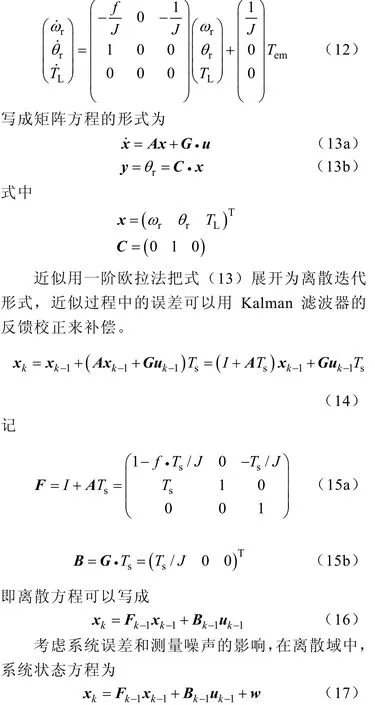
永磁同步电机转子机械运动方程为

为了保持稳定,观测器极点在z平面中应该选择0~1之间的值,极点越靠近0,观测器的反馈增益越大,观测器响应也越快,但是对噪声也就越敏感。
在式(6)所示的观测器中,可以看出无论是转速还是转矩都跟转子位置无关,如果转子位置是由传感器测量得到的,就可以把转子位置这一项去掉,从而得到降阶观测器

基于前面的分析,在Matlab的Simulink平台上,以式(6)所示的3阶负载转矩观测器为例进行仿真分析。如果实际的电机转速和转子位置均可准确测量得到,并作为负载转矩观测器的输入,所有的状态观测器的极点在z平面上都选择为0.8,则转矩观测结果如图1所示。
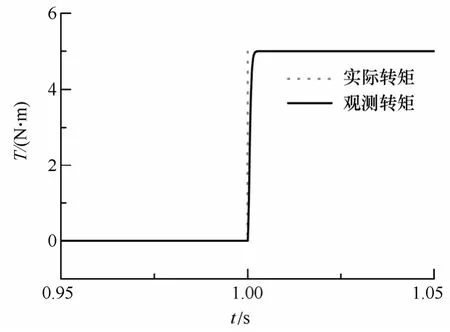
图1 实际位置为反馈量时的转矩观测结果Fig.1 Observed load torque with real position as feedback
可以看出,在实际的转子位置和转速作为负载转矩观测器的输入时,观测转矩能够很好地跟踪实际的负载转矩的变化。
在实际中,机械传感器输出的往往是位置的绝对值或者增量值,存在着量化误差。为了检验观测器对这种误差和精度限制的适应能力,在Simulink仿真中假设电机使用分辨率为 10 000点/圈的机械位置传感器,信号输出后经过正交编码电路后变为40 000点/圈,在1s时对电机突加5N·m的负载转矩,极点仍然选择为0.8,机械传感器的量化误差可以看作是一种测量噪声。通过仿真可以看出,如果机械传感器的输出中存在较大的测量噪声时,普通状态观测器对于噪声的抑制能力较差,容易引起系统不稳定。如果降低观测器的反馈增益,设置观测器极点在0.99,则仿真结果如图2所示。可以看出,噪声增大时,为了维持系统稳定,需要降低状态观测器的反馈增益,但是这样又会造成系统的响应速度变慢,需要在稳定性和响应速度两方面的要求之间寻找一个平衡点。文献[1]中也指出,由机械传感器量化误差造成的这种转速误差会造成观测器不稳定,需要对转速测量环节的相位延迟等进行补偿才能保证转矩观测器的稳定。

图2 小反馈增益时的转矩观测结果Fig.2 Observed load torque with little feedback gain
3 基于Kalman滤波器的负载转矩观测器
Kalman滤波器是由 R.E.Kalman在20世纪 60年代提出的一种最小方差意义上的最优预测估计的方法,也叫做最优观测器。它的突出特点是可以有效地削弱随机干扰和测量噪声的影响,根据当前状态变量估计的误差来实时调整系统反馈增益,Kalman滤波器可以通过噪声特性矩阵的选择来调节状态估计的收敛速度,并保持系统的稳定,最终通过一系列的递推算法来寻找最优的状态反馈增益[11]。观测器的状态方程如下

如果把观测的负载转矩形成对参考转矩的前馈补偿,用观测的转子位置来代替直接测量值,用观测转速来代替对测量位置的微分得到的转速值,系统框图如图3所示。

图3 采用基于Kalman滤波器的负载观测器的系统框图Fig.3 System scheme with load torque observer based on Kalman filter
4 仿真结果
本文以基于 Kalman滤波器的观测器为例,在Matlab Simulink平台上对负载转矩观测器进行了仿真。假设电机的机械传感器分辨率为每圈256点,转速观测结果如图4所示。

图4 Kalman滤波器对转速的观测结果Fig.4 Speed observation results of Kalman filter
图4中的测量转速指的是对机械传感器输出的离散位置信号直接微分得到的转速。因为机械传感器的位置分辨率比较低,每圈只有256个点,所以转速是对每隔50个点进行微分得到的

从图4中可以看出,直接对位置离散信号进行微分,虽然已经加大了微分时间间隔,相当于施加了一个滑动平均滤波器,但是微分结果仍然存在很大的噪声,需要对微分结果再进行低通滤波才能应用于控制中,这个低通滤波又会造成转速测量的延迟,影响控制性能。但是 Kalman滤波器观测的转速就能很好地跟实际转速吻合,并且有效地去除了噪声的影响。转子位置的观测结果对比如图 5所示。
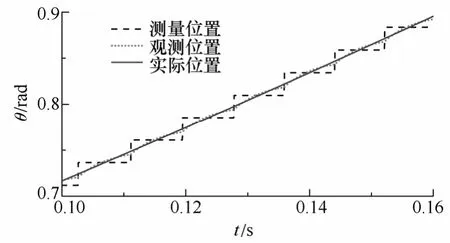
图5 Kalman滤波器对转子位置的观测结果Fig.5 Position observation results by Kalman filter
因为转矩观测器中包含当前的转速和转矩信息,所以在测量位置偏离实际位置的时候,观测器能够根据当前的电机运动状态如转矩和转速等信息对当前的位置进行近似估计,使观测的转子位置能够更加符合实际转子位置的变化。
5 实验结果
为了验证基于 Kalman滤波器的负载转矩观测器的性能,进行了实验验证。实验平台控制部分由美国德州仪器(TI)公司的TMS320C6711浮点DSP和Altera的EP1K100 FPGA组成,其中DSP负责核心算法计算,FPGA控制A/D采样和D/A转换,并产生 PWM信号。负载转矩可以由一个转矩传感器测量得到,其输出信号用Labview虚拟仪器采集到PC机。负载转矩由一台磁粉制动器提供。转子位置由旋转变压器测量得到,其分辨率为256点/圈。主电路采用MOSFET组成的电压型逆变器,前端直流母线由三组12V的蓄电池串联供电,直流母线电压为36V。系统采样周期为100μs。
电机为表面贴式永磁同步电机,电机及其负载系统参数见下表。电机参数中,转子磁链幅值可以由电机参数得到,机械参数如转动惯量和摩擦系数都是由近似测量得到,跟实际值之间存在一定的偏差。另外,转矩传感器测量的转矩里面也会包含一部分负载的摩擦转矩。

表 电机及其负载参数Tab. Parameters of the motor and its load
Kalman滤波器对转子转速和转子位置的观测结果如图6和图7所示。

图6 转速观测结果Fig.6 Observed speed

图7 位置观测误差Fig.7 Position observation error
其中测量转速指的是由式(21)得到的转速再施加一个低通滤波器得到的转速信号。可以看出观测转速能够很好地跟测量转速吻合,并且观测的转子位置跟测量位置之间的误差很小。
Kalman滤波器对负载转矩的观测结果如图8所示,可以看出,观测转矩能够很好地跟测量转矩吻合。受摩擦转矩等的影响,在假设空载时的负载转矩测量值并不为零。
把观测转矩用作参考转矩的前馈补偿,在同样的PI控制器参数下,突加和突减同样大小的负载转矩,转子转速的控制效果如图9所示。

图8 负载转矩观测结果Fig.8 Observed load torque
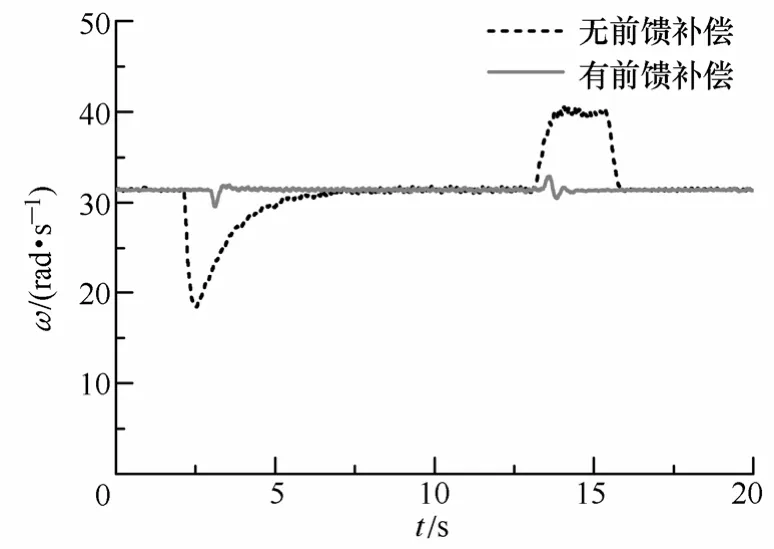
图9 有无前馈补偿时的转速控制结果Fig.9 Speed control results with and without feed-forward compensation
通过比较可以看出,观测转矩的前馈补偿可以非常好地补偿负载转矩的变化,大大提高了负载变化过程中的转速控制性能。通过补偿后的转速控制波形同样也可以看出观测转矩能够很好地跟踪实际的负载转矩的变化。
6 结论
本文分析了转速、位置和负载转矩观测器的原理及实现方法。分析了 Luenberger观测器和基于Kalman滤波器的负载转矩观测器,并以Kalman滤波器为例进行了仿真和实验验证,该观测器可以利用低分辨率的机械传感器的输出信号准确观测出转子位置和转速,代替了传统的转速计算方法。观测器可以准确跟踪负载转矩的变化,用观测的转矩形成对参考转矩的前馈补偿可以大大提高系统在负载发生变化过程中的转速控制性能,弥补了传统的PI控制器不能很好地兼顾转速跟踪性能和对负载干扰的抑制能力的缺点,在保证系统稳定性的前提下提高了系统的动态性能。
[1] Kickul H, Kwanghee N. A disturbance torque compensation scheme considering the speed measurement delay[C]. Industry Applications Conference,1996, 1: 403-409.
[2] Batzel T D, Lee K Y. Slotless permanent magnet synchronous motor operation without a high resolution rotor angle sensor[J]. IEEE Transactions on Energy Conversion, 2000, 15(4): 366-371.
[3] Cerruto E, Consoli A, Raciti A, et al. A robust adaptive controller for PM motor drives in robotic applications[J]. IEEE Transactions on Power Electronics, 1995, 10(1): 62-71.
[4] Gasc L, Fadel M, Astier S, et al. Load torque observer for minimising torque ripple in PMSM[C]. ICEMS 2003, 2003, 2: 473-476.
[5] Senjyu T, Shingaki T, Uezato K. Sensorless vector control of synchronous reluctance motors with disturbance torque observer[J]. IEEE Transactions on Industrial Electronics, 2001, 48(2): 402-407.
[6] Xu Dianguo, Yang Gao. An approach to torque ripple compensation for high performance PMSM servo system[C]. PESC, 2004, 5: 3256-3259.
[7] Bertoluzzo M, Buja G, Stampacchia E. Performance analysis of a servo system with high-bandwidth torque disturbance observer[C]. International Workshop on Advanced Motion Control, 2002: 110-115.
[8] Chan Ki K, Hong Woo R, Yoon Ho K. Robust speed control of PMSM using Kalman filter load torque observers[C]. IECON 97, 1997, 2: 918-924.
[9] Fa T Ming, Yu T Ying. A transputer-based adaptive speed controller for AC induction motor drives with load torque estimation[J]. IEEE Transactions on Industry Applications, 1997, 33(2): 558-566.
[10] Zhang Y, Akujuobi C M, Ali W H, et al. Load disturbance resistance speed controller design for PMSM[J]. IEEE Transactions on Industrial Electronics, 2006, 53(4): 1198-1208.
[11] 郑泽东, 李永东, Maurice Fadel, 等. 基于扩展Kalman滤波器的 PMSM 高性能控制系统[J]. 电工技术学报, 2007, 22(10): 18-23.Zheng Zedong, Li Yongdong, Maurice F, et al. High performance PMSM control system based on extended Kalman filter[J]. Transactions of China Electrotechnical Society, 2007, 22(10): 18-23.
猜你喜欢
数学物理学报(2021年2期)2021-06-09 08:54:26
数学物理学报(2019年5期)2019-11-29 07:46:34
四川冶金(2018年1期)2018-09-25 02:39:26
广东技术师范大学学报(2016年5期)2016-08-22 09:07:22
通信电源技术(2016年1期)2016-04-16 04:57:26
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
哈尔滨师范大学自然科学学报(2015年1期)2015-04-19 06:55:30
电测与仪表(2015年19期)2015-04-09 11:32:56
电机与控制应用(2015年3期)2015-03-01 03:49:59