
基于GPS/GPRS的挖掘机车载终端设计
2009-06-20 08:45张继飞刘强
中国高新技术企业 2009年6期
张继飞 刘 强
摘要:文章设计了一种基于GPRS(General Packet Radio Service)和GPS定位跟踪的挖掘机车载终端,通过GPRS模块建立与远程监控中心的链路连接,实现挖掘机主机与监控中心的数据交互。该终端的设计与开发对工程机械远程监控具有实际意义并得到广泛应用。
关键词:挖掘机;GPRS网络;GPS;CAN总线;数据传输
中图分类号:TP23文献标识码:A文章编号:1009-2374(2009)06-0012-02
近年来,对现场作业的工程机械进行有效的远程监控,获得工程机械设备的位置、工况等信息的需求越来越高。当前通常的做法是通过SMS短信进行远程数据的传输,传输的工程机械数据一般只有定位信息,数据容量小,实时性差。通用分组无线业务(General Packet Radio Service,GPRS)能够提供远程数据的大容量、实时传输。通过GPS人们能够对远程现场作业的挖掘机进行全国范围、实时工况、实时位置的监控。同时将GPRS技术与全球定位技术(GPS)技术相结合,为挖掘机的客户提供如防盗、维护、调度等各种增值功能,在工程机械行业具有广泛的应用前景。
一、远程监控信息服务系统组成
整个远程监控信息服务系统由客户挖掘机、GPS全球卫星定位系统、GPRS远程通讯系统、Internet、车载终端数据采集系统和远程监控系统组成,如图1所示:
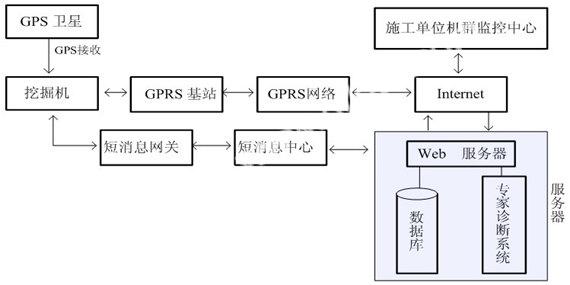
图1 挖掘机远程监控信息服务系统总体结构原理框图
它是依靠安装在挖掘机上的各种传感器和控制器,对设备的运行状态参数、故障信息和位置参数进行采集,经过控制器转换为CAN总线数据,发送到CAN总线,经过处理器运算处理以后,它将GPS位置和时间信息及其它信息,由GPRS模块无线发送到GPRS网络,通过GGSN(Gateway GPRS Support Node. GPRS网关支持节点)和SGSN(Serving GPRS Support Node. GPRS业务支持节点)到达远程监控中心服务端,实现客户挖掘机与远程监控服务端的通信;企业远程监控服务端系统通过与故障诊断数据库中相应正常状态参数数值相比较对故障信息进行诊断,并将诊断的结果信息通过GPRS的方式发送到车载终端的监控器,操作员就可以通过监控器的各种故障显示来进行相应的操作。同时,若有些重要的部件超过规定范围也可以启动故障报警程序,提醒操作者和监控者,或者可以直接进行远程控制。
二、车载终端设计和实现
由于车载终端需要完成数据的通信、处理、存储,因此需要MCU的嵌入式板,三星S3c2410芯片采用ARM9内核,通信接口包括串口、CAN等,符合车载终端远程通信的要求。同时,与远程监控中心交互,需要支持网络通信协议。目前主要有两种实现方式:一种是采用微控制器控制GPRS通信模块,;另一种方法是直接采用嵌入式网络模块来实现。相比较而言第一种方法具有更大的灵活性,简便易行。第一种方法由于模块内嵌了PPP、TCP、IP、UDP等网络通信协议栈,因此使用方便,而第二种方法需要编写上述通信协议,应用方式复杂,因此我们选用第一种,使用GPRS通信模块。
(一)硬件结构
系统的硬件设计总体如图2所示:
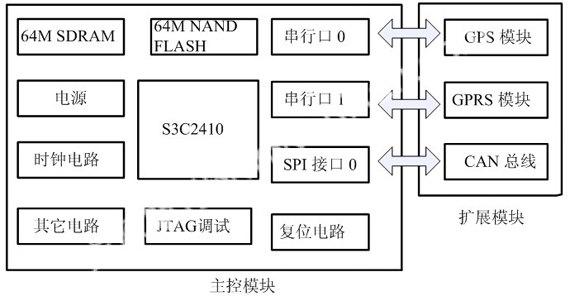
图2 挖掘机车载终端整体电路框图
硬件系统主要由GPRS网络通信模块、微控制器、GPS定位模块、CAN等外部接口电路组成。
GPRS网络通信模块选用MC55模块。MC55模块是西门子公司推出的新一代全球移动通信系统通信模块,支持端对端用户的通信方式,支持短信息业务和GPRS等数据传输和语音呼叫。模块提供了非常完整的使用接口,包括两路串行数据通信接口、用户识别卡接口,内嵌TCP/IP栈,串口支持GSM07110协议,波特率可调。GPRS通信模块的串行接口是一个全双工的UART口,用户可以通过这个串口发送AT命令与MC55交互,进行数据的收发和信息交互。
S3c2410微处理器是一款由三星半导体公司为手持设备等相关应用设计的,低功耗、高集成度的微处理器,采用272脚FBGA封装,包含一个ARM920T内核。其内部包含以下功能模块:
1.8V/2.0V内部供电,3.3V存储器,3.3V外部I/O供电,具有16KB一体化的Cache/MMU;具有外部存储器控制器(SDRAM控制和片选逻辑);4路DMA,具备外部请求脚;3路UART(支持IrDA1.0,16字节的发送FIFO,16字节的接收FIFO)/2通道SPI;1路多主模式的IIC总线,1路IIS总线控制器;4路PWM定时器和一路内部定时器;具有看门狗定时器;另外,通过设计CAN总线控制模块完成采集挖掘机其它部分的控制器或者传感器的输出信号量,从而使挖掘机整体具备电路故障的自诊断功能,方便了挖掘机车辆电路故障的维修以及各个状态参数的监控,提高了挖掘机作业的安全性。
(二)软件结构
终端软件部分有无线数据传输与处理、GPS数据传输与处理组成两个模块组成。软件使用基于Linux操作系统的QT来设计人机界面和线程。
1.线远程数据传输与处理。无线远程数据传输与处理模块的程序流程如图3所示:
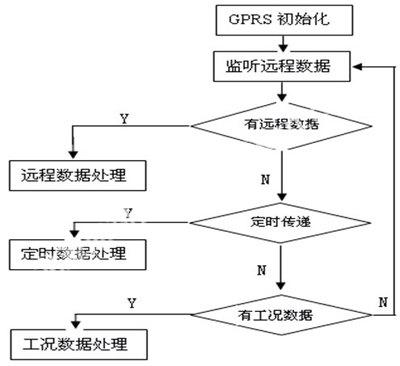
图3 无线远程数据传输与处理模块的程序流程图
终端启动后进行GPRS通信模块的初始化,主要是通过AT命令设置MC55的各种通信参数并与远程监控中心建立-个Socket连接,然后侦听监控中心是否有参数传输或命令数据如果侦听到远程数据传输,进行相应的处理,远程数据的侦听使用MC55的一种数据主动传输方式,当MC55接收到远程数据时,自动接收远程数据。
如果终端通过侦听没有发现远程数据传输,则判断是否进入定时数据传输状态,终端每个2小时将向远程监控中心传输一次终端信息,包括定位信息(位置、速度、方位)、时间信息、连接信息(终端IP、端口号)。
终端在处理远程数据和定时数据时,同时监听本地通信接口是否有来自主机控制器(图2)的工况数据传输请求,如果检测到有工况数据传输请求,则进行相应的处理,如果没有数据请求则终端无线传输处理模块重新进入侦听状态。
2.GPS数据传输与处理。GPS模块采用GARMIN公司的GPS-LVC接收机,通过S3C2410的串口0连接GPS模块的数据输出口,GPS模块每隔1秒输出定位信息和时间信息,格式为NMEA0183标准语句,通过解析GPRMC语句获得时钟和定为信息,其中GPI MC语句解释如下:
该类型定位数据的各个符号位的含义如下所示:
$GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,*hh,
$GPRMC:定位语句起始标志;
<1>:协调世界时UTC(hhmmss);
<2>:GPS定位状态指示,A为有效定位,V为无效定位;
<3>:纬度(ddmm.mmmm);
<4>:纬度标志,N为北纬,S为南纬;
<5>:经度(dddmm.mmmm);
<6>:经度标志,E为东经,W为西经;
<7>:相对于地面的速度(000.0-999.9),单位为海里;
<8>:轨道相对于地面的夹角(000.0-359.9度);
<9>:UTC日期(ddmmyy);
<10>:磁偏角:000.0-180.0度;
<11>:磁偏方向:E为东偏,W为西偏;
*:校验标志符;
hh:总校验和;
GPS信息解析过程中注意时间信息是按照格林威治时间作为基准的,如果转换成北京时间需要加上北京所在的时区时间,GPS信息解析完毕后将实时定位数据保存,等待无线传输与处理模块的定时数据传输请求或远程数据请求,如果收到远程数据请求,模块按照请求的类型将定位信息或时间信息传输到无线传输与处理模块。
三、结语
基于GPRS/GPS的挖掘机车载终端采用GPRS网络作为数据通信平台,GPS作为时间和定位信息来源,充分利用了GPRS的数据传输优势和GPS技术优势,结合挖掘机的自身特点,具有数据传输实时性强、可靠性高的特点。需要注意的是采用本终端在GPRS信号差的地方可以自动切换到GPRS通信模块自带的GSM短信通道,完成数据传输。
参考文献
[1]陈壮奕.基于GPRS的电能远程抄表系统的设计与实现[J].广东电力,2006.
[2]Siemens.MC 55/56 Hardware interface description[Z].2005.
[3]周立功公司.LPC21 19/2129/2194/2292/2294使用指南[Z].2004.
[4]北京合众思壮科技有限公司.GARMIN GPS0EM产品说明书[Z].2006.
[5]由相,张少圃,吕其惠.GPS-GPRS在智能挖掘机远程在线监控系统中的设计应用[J].建设机械技术与管理,2007,(6).
[6]杨栋,王汉其,熊俊.基于GPRS工程机械远程监控终端的设计[J].自动化技术与应用,2008.
基金项目:福建省自然科学基金资助项目(项目编号E0510023)。
作者简介:刘强(1972-),男,华侨大学机电学院副教授,硕士生导师;张继飞(1983-),男,华侨大学机电学院硕士研究生,研究方向:嵌入式系统应用。
猜你喜欢
装备制造技术(2020年4期)2020-12-25
现代电子技术(2016年24期)2017-01-19
现代电子技术(2016年22期)2016-12-26
有色金属设计(2015年2期)2015-02-28
