松软土壤环境下月球车动力学与控制的仿真工具
2008-12-20 02:05:29徐亚伟陈建新刘良栋刘建军
空间控制技术与应用 2008年6期
徐亚伟,陈建新,刘良栋,2,刘建军,2
(1.北京控制工程研究所,北京100190;2.空间智能控制技术国家级重点实验室,北京100190)
松软土壤环境下月球车动力学与控制的仿真工具
徐亚伟1,陈建新1,刘良栋1,2,刘建军1,2
(1.北京控制工程研究所,北京100190;2.空间智能控制技术国家级重点实验室,北京100190)
开发一种月球车三维可视化动力学与控制的仿真工具。该工具融合多刚体系统动力学、车轮-土壤交互动力学以及运动控制系统模型,可以模拟松软土壤与复杂地形等环境,评估月球车在这些环境下的运动状况,并研究如爬越松软土壤的大角度坡面等关键工况下的运动控制方法及其优化。最后给出月球车在该仿真工具上运动控制的应用实例。
月球车;动力学与控制;松软土壤-车轮交互作用;仿真工具
1 引 言
在月球车的方案设计和验证阶段,通常需要采用地面样机技术进行综合试验,并对运动与控制系统的性能进行评估。但在项目初期,由于开发地面样机技术成本高,耗时过多,需要重复试验,因而难以实施。同时,地面样机还缺乏对设计细节随意更改的灵活性,在地面上复现月球表面环境也较为困难,需要仿制月面表层土壤并构建模拟月面的试验场。运用虚拟样机技术(VPT,virtual prototyping technology)开发的描述月球车多刚体系统动力学和车轮-地形-土壤接触交互作用的仿真工具,为解决上述问题提供了一种高效、可行的方法。
目前,国外研究空间机器人和行星探测车的相关科研机构,运用可视化的系统三维建模与动力学分析软件,开发了多种行星探测车运动子系统性能评估与控制优化的仿真工具。Patel等人研制了一种称为RMPET(rovermobility performance evaluation tool)的探测车底盘评估工具[1],该工具使用了基于贝克理论[2]的车轮-土壤解析模型和结构机构设计软件Solid-Works三维仿真器。Jain[3]和Yen[4]等人研制了一种名为ROAMS(rover analysis,modelling and simulation)的虚拟探测车仿真器,该仿真器既可进行独立仿真,也可利用车载软件进行闭环或开环操作等多种模式的仿真。Harnish和Lach等人开发了ORSIS(off road system interactive simulation)仿真系统[5],其中包含了三维车体的多刚体系统动力学模型、传动系和转向机构模型、车轮-土壤动力学模型以及三维地形模型。欧空局(ESA)也研发了RCAST[6]仿真工具,用来对其研制的火星探测车(ExoMars)进行评估和优化。
在国内,北京控制工程研究所最早运用虚拟样机技术对月球车动力学特性进行了分析和仿真研究[7],并对其机械结构进行了优化设计。此外,王巍[7]提出可以采用虚拟样机技术对月球车机电与控制系统进行建模与仿真的方案;蔡则苏[8]采用虚拟样机技术对HIT-1月球车进行了仿真研究;高海波[9]基于ADAMS(automatic dynam ics analysis of mechanical systems)软件研究了行星轮式月球车的地面不平度函数。但迄今还没有研制出一种融合车轮-土壤交互作用和月球车动力学特性及其控制系统的综合仿真工具。
本文以6轮摇臂-托架式月球探测车为对象(如图1所示),开发了一种月球车运动子系统动力学与控制的三维可视化数字仿真工具。该工具主要用于在地面难以复现的月面环境下,对月球车行驶在月面松软土壤和复杂地形中的动力学特性以及导航控制方法进行仿真分析、验证和演示。

图1 月面巡视探测器虚拟样机三维可视化仿真工具的界面
2 仿真工具的体系结构与功能
图2表示仿真工具的体系结构、核心组成模块的连接关系及变量传递关系。目前该工具具备以下功能:
1)对CAD软件中导出的月球车三维几何模型,包括悬架式等复杂的底盘结构进行多刚体系统的动力学快速建模;
2)复杂多刚体系统的动力学三维可视化仿真以及仿真结果的交互式显示;
3)车轮-土壤交互作用的定量分析。实时计算松软土壤对车轮的作用力和力矩、车轮运动状态以及滑移量,用于指导运动控制系统的设计和仿真;
4)地形的定义和三维可视化建模。支持创建和修改任意的三维地形文件,实现月球车在复杂地形上行走和接触效果的三维可视化仿真;
5)月球车导航与控制系统仿真。集成直流电机、传感器等底层控制单元模型和各种控制算法的仿真接口,实现电机开环的力矩控制和闭环的位置、速度伺服控制等两种模式的仿真,以支持不同的控制算法。
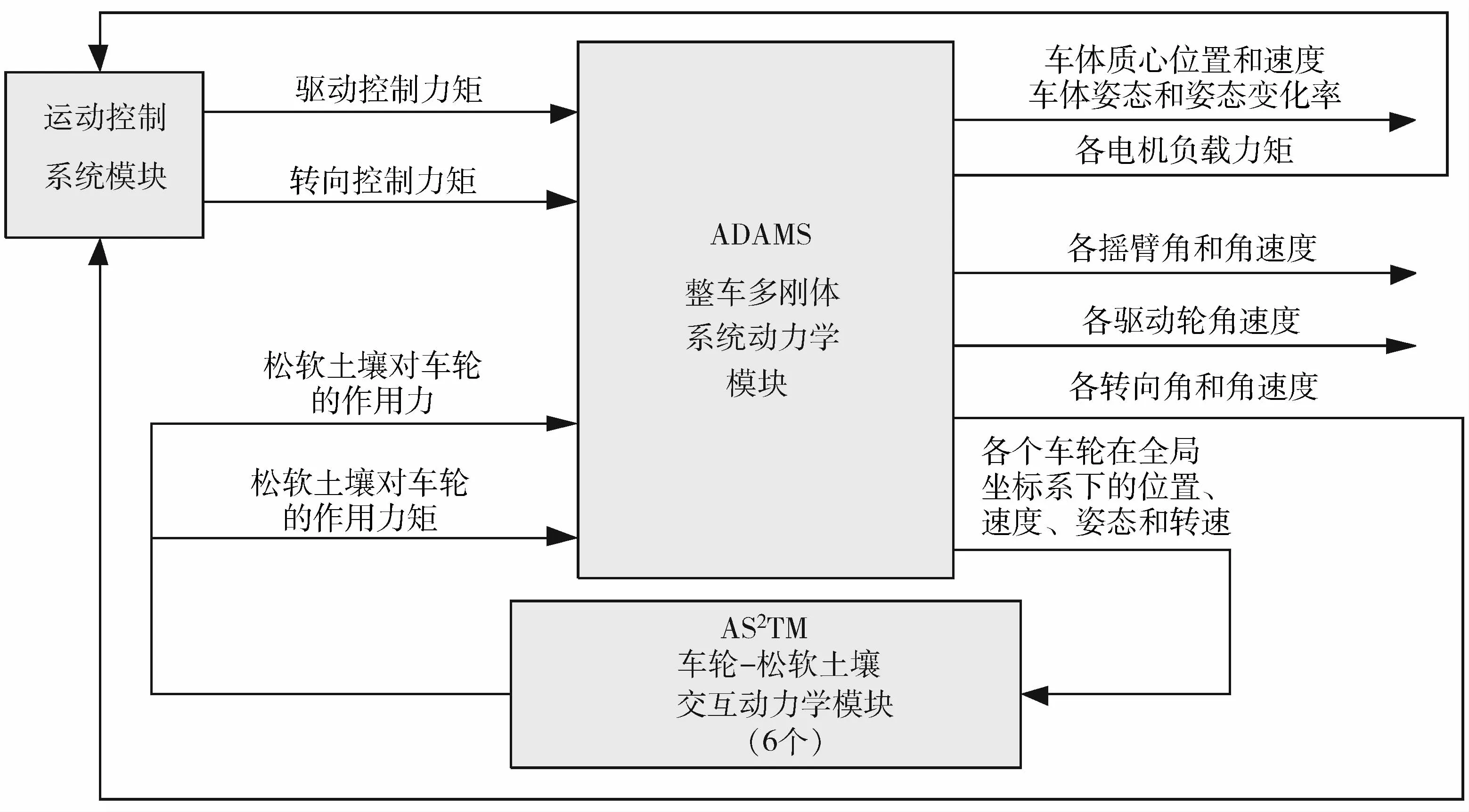
图2 仿真工具的组成模块
3 仿真工具的组成模块
3.1 月球车ADAM S多刚体系统动力学模块
本文中,月面巡视探测器运动子系统的底盘结构采用6轮摇臂-托架式被动适应型悬架,所建立的底盘结构如图3所示。
总包(General Contract)也被称为工程总承包,通常是指总包商被工程项目业主委托,根据总包合同规定,来对项目进行设计、采购、实施等操作流程。一般来说,总包业务被分成三种形式:设计采购施工总承包(EPC)、交钥匙工程总承包(Turnkey)、设计施工总承包(DB)[1]。其中EPC总包模式,是最受工程项目管理者推崇的形式,被广泛运用在各类项目当中,成为目前该领域的主流承包方式。具体包括以下优势:

图3 月面巡视探测器摇臂-托架式悬架
图中车体主体结构与左、右主摇臂之间采用差速机构相连。差速机构是各运动约束设计的关键和难点,这里采用在车体与左、右主摇臂关节的平面旋转铰之间建立斜齿轮耦合运动副的方法,使主体结构相对地面的姿态保持均化,以防止地形起伏较大时,由两个主摇臂之间的大角度差值引起主体的俯仰角姿态变化过大。
除与被动悬架式底盘机构的摇臂与托架相关的被动自由度外,与所创建探测车运动子系统相关的自由度还包括:
1)前两个车轮与后两个车轮转向的自由度;2)绕6个车轮轮轴转动的自由度。
显然,由于被动适应式底盘机构和车轮的转向与滚动共同作用,使得月球车在非平坦地形上行驶时,车体主体将额外产生关于位置和姿态的6个自由度(6-DOF)。
3.2 AS2 TM车轮-松软土壤交互作用模块
AS2TM(AESCO soft soil tyre model)模块[10]可以S-Function的形式无缝地集成到MATLAB/Simulink环境中。图4为AS2TM模块的组成结构。
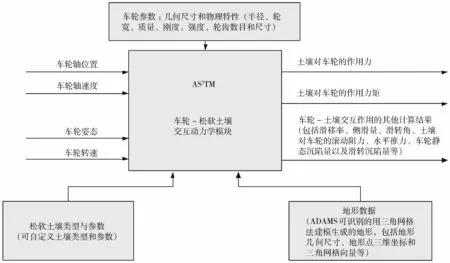
图4 AS2 TM模块的结构
AS2TM模块能够对车轮与松软土壤的交互作用进行各种动态和静态仿真。考虑单个车轮与土壤相互作用的同时,还应考虑在其所属的整车动力学模型中,车轮与车体悬架之间存在的多刚体系统动力学效应。因此AS2TM模块提供了与ADAMS无缝连接的轮胎模型接口和三角网格地形接口,能够与ADAMS整车多刚体系统动力学模块进行轮胎数据和地形数据的交换,从而实现车体动力学-车轮-土壤交互作用的联合仿真。其中车体-车轮动力学由ADAMS求解,而车轮-土壤交互作用的相关参数由AS2TM模块求解。
3.3 运动控制系统模块
建立运动控制系统仿真环境,需要在对月球车运动系统多刚体系统动力学、车轮-土壤交互作用和月球表面地形环境进行融合的基础上,创建控制系统仿真所需要的各种传感器模型和执行机构模型,明确动力学模型与控制系统的接口以及输入与输出的相关设置,以便与控制系统通信。运动控制系统的仿真主要包括如图5所示的几个环节。
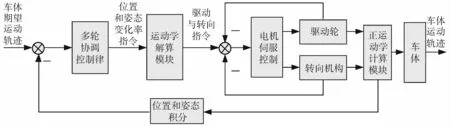
图5 运动控制系统的一种仿真框图
考虑到月球车既有基于运动学模型的控制策略,又有基于动力学模型的运动控制策略,因而设计了控制系统的两种仿真配置方案:基于运动学控制的仿真配置和基于动力学控制的仿真配置。基于动力学控制的仿真配置比较简单,只需对作为执行机构的电机实施开环控制,按照指令给车轮施加驱动力矩或转向力矩;而基于运动学的控制方案则要求电机带动车轮或转向机构,跟踪给定的车轮转速或转向角度,因此需要对电机采用车轮位置或速度伺服闭环控制。图5给出了基于运动学控制策略的仿真方案。
创建月球车动力学模型的输入状态变量和输出状态变量,将动力学模型作为被控对象,以SFunction的形式通过ADAMS/Controls接口送到MATLAB环境下,与AS2TM车轮-土壤交互作用模块和控制系统模块相连,就可以进行松土环境下的月球车运动控制仿真。
4 应用实例
在所开发的仿真工具上,使用基于运动分解的路径跟踪控制方法[11]对月球车进行运动控制,使其按照如下的给定路径行驶:
1)直线路径:前4 s内的路径设置为沿车体纵向前进方向的直线;
2)曲线路径:4 s之后的路径设置为向左偏航的圆弧,转弯半径为5 m,共仿真10 s。
将导航坐标系原点设置在初始时刻车体的质心处,沿车体纵向正前方为X方向,沿车体横向向左为Y方向。
(1)路径跟踪控制的仿真结果
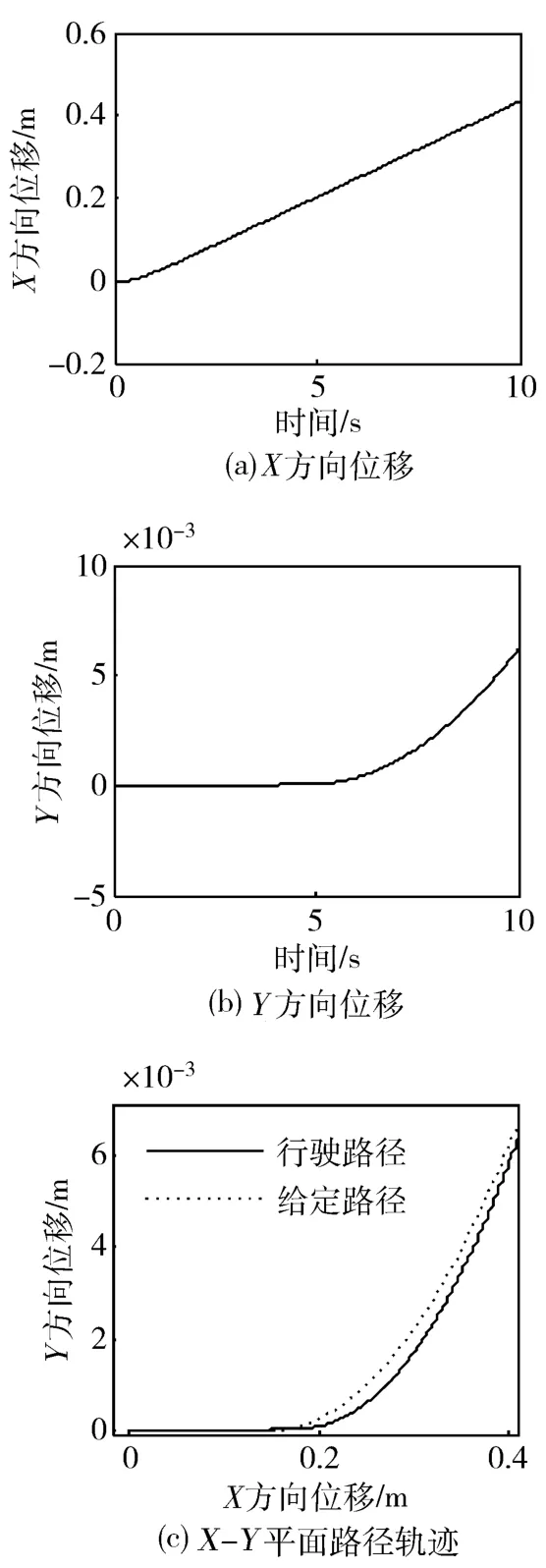
图6 月球探测车的位移和路径轨迹
如图6所示,前4 s内在驱动电机作用下,月球车可以按照给定的直线路径行驶。4 s之后,在转向和驱动电机的共同控制作用下,开始按照给定向左偏航的圆弧路径进行跟踪,沿Y方向的位移逐渐加大。从X-Y平面上的路径轨迹图可以看出,月球车基本按照给定的圆弧路径行驶,并且由于运行在松软土壤上的滑移以及控制电机本身的响应误差等因素的影响,会导致一定的路径跟踪误差。
图7所示的月球车的偏航角曲线也表明,在前4 s内跟踪沿车体纵向前进方向的直线路径时,车体偏航角基本为0。在4 s之后,发出运动分解控制指令,带动转向电机动作,月球车开始以接近0.01 rad/s的偏航速率跟踪给定的向左偏航的圆弧路径。经计算分析,得出最终的偏航角姿态误差为3.5×10-3rad。

图7 探测车的偏航角
(2)车轮与土壤的相互作用结果
以左前轮为例,由仿真工具得到的车轮滑移信息如图8所示。在车轮沿直线行驶的启动阶段和月球车转换到沿圆弧路径行驶的初始阶段,车轮都有较大的纵向滑移,并且滑移率都接近于1(完全滑转)。这说明车轮在启动和大角度转向机动的短暂时间内,滑移都比较大。在达到稳定行驶状态后,滑移率基本都维持在小于0.1的小数值范围内。同时还可以看出,月球车以稳定速度跟踪直线路径时,基本没有侧向滑移和滑转角;但4 s后,当月球车开始跟踪圆弧路径时,车轮持续向左偏航,此时由于松软土壤对车轮作用的影响,导致左前轮出现向右(-Y方向)的侧向滑移,并且出现了滑转角。
从仿真结果可以看到,仿真工具能够描述月球车在松软土壤上的行驶状态及其动力学特性,得出车轮与土壤相互作用的结果以供分析。
通过以上仿真分析可知,由于松软土壤对车轮的作用,车体和车轮都产生了一定程度的滑移。在启动阶段和持续偏航阶段,这种影响尤为突出。因此,下一步研究工作可以在仿真工具辅助下,集中分析滑移给运动控制带来的影响,并通过改进控制方法来提高运动控制效果,或在车轮启动和越障过程中按照给定的滑移率实现对滑移的优化控制,从而提高车体的平稳性和安全性。
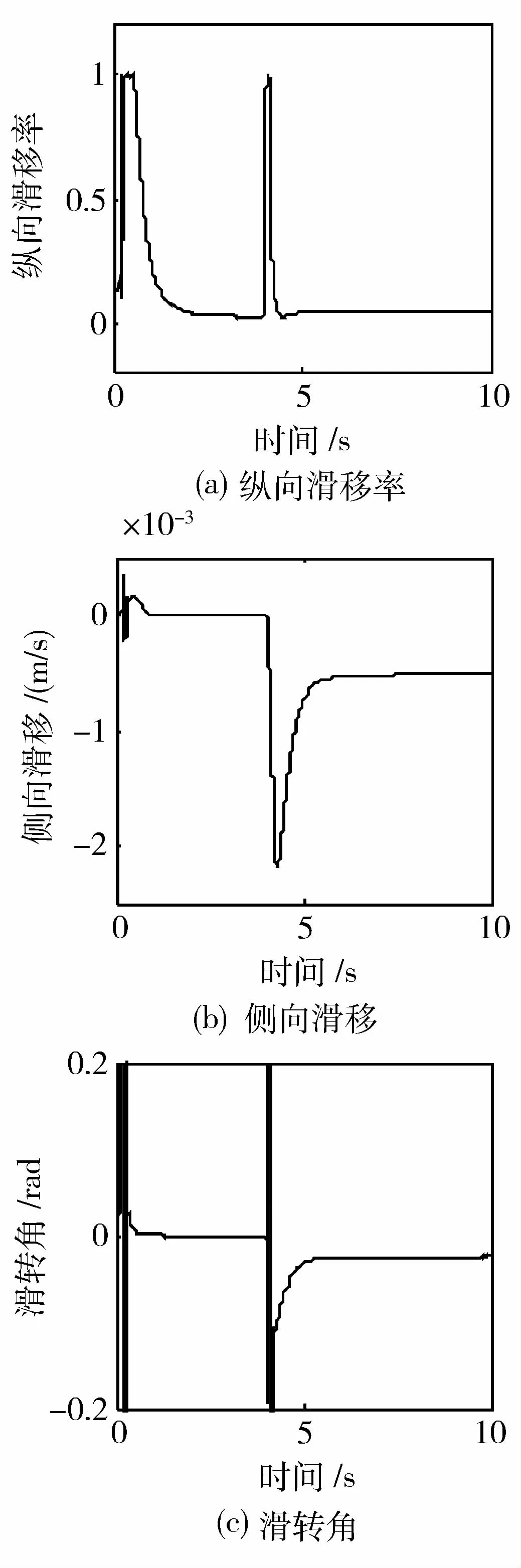
图8 左前轮的纵向滑移率、侧滑和滑转角
5 结束语
本文运用虚拟样机技术,开发了一种用于描述月球车运动系统多刚体系统动力学特性,并融合车轮-土壤交互接触作用和地形建模功能的三维可视化月球车动力学与运动控制仿真工具。该工具可以模拟松软土壤与复杂地形等环境,评估月球车在这些环境下的运动状况和动力学特性。利用在该工具上所实现的运动控制系统仿真,能够进行关键工况下的运动控制方法设计及优化研究。给出的应用实例表明,仿真工具能够评估月球车在松软土壤上的运行效果,并验证运动控制方法的有效性。下一步工作集中在考查AS2TM模块对诸如侧滑等其他工况的描述能力。为全面验证6轮月球车仿真工具的效果,还需要进一步的试验支持。
[1]Patel N,Ellery A,Allouis E,et al.Rover mobility performance evaluation tool(RMPET):a systematic tool for rover chassis evaluation via application of Bekker theory[C].The 8thESA Workshop on Advanced Space Technologies for Robotics and Automation,ASTER 2004,ESTEC,Noordwijk,The Netherlands,November 2-4,2004
[2]Bekker M.Introduction to terrain-vehicle systems[M].Ann Arbor,USA:The University of Michigan Press,1969
[3]Jain A,Guineau J,Lim C,et al.ROAMS:planetary surface rover simulation environment[C].International Symposium on Artificial Intelligence Robotics and Automation in Space,Nara,Japan,May 19-23,2003
[4]Yen J,Jain A,Balaram J.ROAMS:rover analysis,modelling and simulation[C].International Symposium on Artificial Intelligence Robotics and Automation in Space,Noord wijk,The Netherlands,June,1999
[5]Harnisch C,Lach B.Off road vehicles in a dynamics three-dimensional real time simulation[C].The 14thInternational Conference of the International Society for Terrain-Vehicle Systems,Vicksburg,MSUSA,October 20-24,2002
[6]Robert B,Winnie L,Tim B.Development of a dynamic simulation tool for the ExoMars rover[C].ISAIRAS Conference,Munich,Germany,September 5-8,2005
[7]王巍,梁斌,强文义.基于虚拟样机技术月球机器人运动仿真[J].高技术通讯,2002,2(11):42-48
[8]蔡则苏,洪炳熔,刘玉强,等.基于虚拟样机的月球探测机器人运动学建模[J].哈尔滨工业大学学报,2004,36(2):209-214
[9]高海波,邓宗全,胡明,等.月球车用行星车轮等效地面不平度函数的研究[J].哈尔滨工业大学学报,2004,36(2):183-186
[10]AESCO.MATLAB/Simulink module AESCO soft soil tyre model(AS2TM)user's guide[M/CD].Hamburg,Germany:AESCO,2005,1-49
[11]徐亚伟,刘良栋,陈建新.松软土壤环境下月球车的路径跟踪控制[C].第十三届空间及运动体控制技术学术会议,湖北宜昌,2008
A Simulation Tool for Dynamics and Control of a Lunar Rover in Soft Soil Environment
XU Yawei1,CHEN Jianxin1,LIU Liangdong1,2,LIU Jianjun1,2
(1.Beijing Institute of Control Engineering,Beijing 100190,China;2.National Laboratory of Space Intelligent Control,Beijing 100190,China)
This paper develops a 3-D visualization simulation tool for lunar rover's locomotion and control that incorporates rigid multi-body dynamics and tyresoil interactions,allows us to study key test cases such as slope climbing in soft soil,and gives an example of application of the lunar rover's motion control in the simulation tool.
lunar rover;dynamics and control;tyresoil interactions;simulation tool
TP242.3
A
1674-1579(2008)06-0052-06
2008-05-10
徐亚伟(1983-),男,郑州人,硕士研究生,研究方向为空间机器人控制(e-mail:xuyawei@gmail.com)。
猜你喜欢
工业工程设计(2021年3期)2021-06-30 12:15:04
教学考试(高考物理)(2019年2期)2019-04-24 12:48:00
电子制作(2018年23期)2018-12-26 01:01:32
铜仁学院学报(2018年6期)2018-07-05 09:47:52
科学24小时(2017年5期)2017-05-19 02:39:34
电力系统及其自动化学报(2016年5期)2016-12-01 03:13:00
太空探索(2016年9期)2016-07-12 10:00:05
焊接(2015年1期)2015-07-18 11:07:33
焊接(2015年1期)2015-07-18 11:07:33
中学科技(2015年7期)2015-07-03 05:44:32