故障模式下的空间交会防撞设计
2008-12-20 02:05:27徐世杰
空间控制技术与应用 2008年6期
卢 山,徐世杰
(北京航空航天大学宇航学院,北京100191)
故障模式下的空间交会防撞设计
卢 山,徐世杰
(北京航空航天大学宇航学院,北京100191)
针对轨道平面内某一方向发动机失效的情况,利用控制力的耦合效应,设计了航天器轨道转移的控制律。利用碰撞概率计算公式分析航天器发生碰撞的可能性,并结合燃料消耗选择一条碰撞概率小于给定的警戒值且燃料最优的转移轨道。最后通过仿真验证了发动机失效情况下的主动防撞机动控制律的有效性。
交会对接;主动防撞;碰撞概率;发动机失效
1 引 言
随着航天器交会对接任务的日益增多,尤其是自主交会技术的发展,空间交会的安全性成为一个不容忽视的问题。在设计交会轨迹时,任务专家会事先定义一条安全交会走廊,在该走廊内,主动航天器即使发生推力失效等故障,也不会与目标航天器发生碰撞,这种防撞方式称为被动防撞[1-2]。而如果主动航天器超出了安全交会走廊,则需要采取主动防撞措施来避开目标,一般可以根据C-W方程来设计防撞机动的控制律。
为了更准确地描述两个航天器发生碰撞的可能性,文献[3-5]提出了采用碰撞概率来表示两个航天器碰撞可能性的方法,该方法通过定义安全区域包络体和相对状态误差的协方差矩阵,求出任意时刻的碰撞概率密度,并在整个安全区域内积分得到两个航天器的碰撞概率。这种方法能定量地描述发生碰撞的可能性,并且将航天器的安全区域和相对状态误差都考虑在内,具有全面性。但由于需要积分得到碰撞概率,会对星上判断是否会发生碰撞的快速性产生影响。文献[6]基于碰撞概率设计了主动防撞的轨道机动控制律。但是目前针对主动防撞的研究都忽略了一个问题,即主动航天器发生故障往往是由于某一方向上的发动机失效而无法喷气,因此即使根据相应的控制律得到机动所需要的推力,也有可能因为在某一方向上无法提供推力而造成主动防撞失败。
本文利用轨道平面内控制力的耦合效应,设计某一方向发动机失效状态下的轨道转移控制律,同时利用简化后的碰撞概率计算公式分析了航天器之间发生碰撞的可能性,最后设计出一条符合安全要求的主动防撞转移轨道。
2 基于碰撞概率的空间安全分析
为了计算两个航天器之间的碰撞概率,需要先定义安全区域包络体和位置误差3σ椭球。
(1)安全区域包络体
每个航天器都需要定义一个安全区域,任何其他航天器都不能进入该区域,否则认为两个航天器发生了碰撞。一般可以把航天器的安全区域定义为一个球体,该包络体的中心为参考航天器中心。
(2)相对位置误差3σ椭球
由于相对状态的测量存在着误差,假设该误差可以用三维Gauss分布来描述,则相对位置误差可以用协方差矩阵来表示,在空间描述为一个3σ椭球,该椭球的中心定义为主动航天器中心。两者在空间的关系如图1所示。

图1 相对位置误差椭球和安全区域包络体
图2表示根据碰撞概率设计的空间防撞流程。首先给定两个航天器的初始相对状态和预先设计好的安全防撞转移的目标位置,然后外推一段时间内的相对位置和误差协方差矩阵并计算每个时刻的瞬间碰撞概率。如果存在某一个时刻,碰撞概率大于给定的警戒值,则表明两个航天器存在发生碰撞的可能性,主动航天器需要采取防撞机动,可以根据给定的初始相对位置和目标位置,选择一个机动时间。如果机动后的轨道外推得到的每个时刻的碰撞概率均小于警戒值,则该机动时间选择合适,可以进行轨道机动。如果仍存在大于警戒值的时刻,则说明选择的机动时间不合适,需要重新选择时间并重复上述步骤,直至找到合适的机动时间。

图2 空间防撞设计的流程
3 相对状态误差矩阵和碰撞概率
3.1 相对状态误差矩阵计算
定义目标航天器的轨道坐标系So,原点在目标航天器的质心,z轴沿径向朝向地球,x轴垂直于z轴且沿速度方向,y轴符合右手定则,即沿轨道面负法线方向。
假设目标航天器运行在圆轨道或近圆轨道上,在交会对接阶段两个航天器的距离较近,故相对运动可以用如下C-W方程来描述:
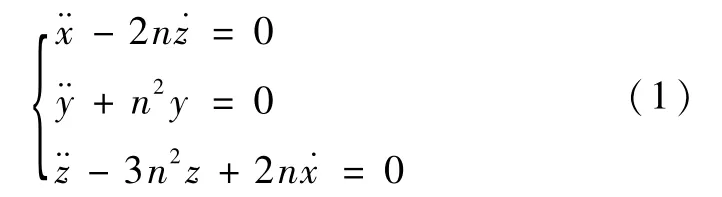
式中,x、y、z表示主动航天器相对于目标航天器的位置在轨道坐标系上的分量,n表示目标航天器的轨道角速度。
上式是一个常系数线性微分方程组,可以得到其状态转移矩阵为

式中,t为转移时间,C(nt)=cos(nt),S(nt)=sin(nt)。

设初始时刻相对状态误差的协方差矩阵为Cx0,则协方差矩阵的传播方程为

3.2 碰撞概率计算
定义相对位置R=[x y z]T,取相对位置的误差协方差矩阵,即协方差矩阵Cx的左上角的3×3子矩阵,记为CR。用符号‖CR‖表示行列式|CR|的绝对值。根据文献[3]直接得到两个航天器在t时刻的瞬时碰撞概率密度为

则t时刻的瞬时碰撞概率为概率密度在整个安全包络体内的积分,即
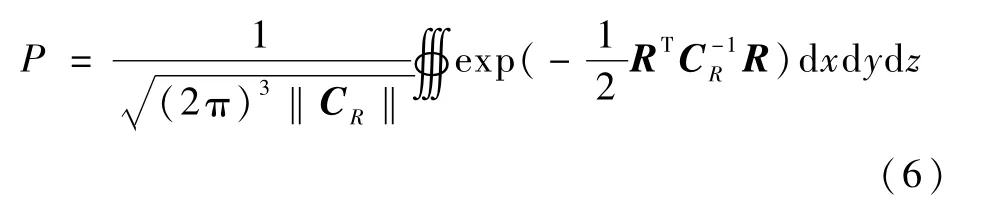
主动航天器在接近目标的过程中,可以通过状态转移方程和协方差矩阵的传播方程外推得到在一段时间内任意时刻的相对状态和误差协方差矩阵,并根据式(6)积分得到任意时刻的碰撞概率。一旦在某一时刻的瞬时碰撞概率大于预先给定的安全值,则主动航天器可以提前采取机动措施防止发生碰撞。
但观察式(6)也可以发现,在外推计算某一时刻的碰撞概率时都需要进行三维积分运算,而航天器上计算机的运算能力有限,这就大大降低了计算速度。对于安全防撞而言,实时性和快速性十分重要,同时通过文献[5]的比较结果,可以近似认为在安全包络体内的概率密度是一致的,因此式(6)可以简化为

式中Venvelope为安全包络体的体积,由于在两个航天器接近过程中安全包络体的体积是恒定的,则瞬时碰撞概率的求解可以进一步简化为求解瞬时碰撞概率密度ρ。由于瞬时碰撞概率密度的求解是一个简单的外推计算过程,因此就可以大大缩短碰撞分析的时间,有利于主动航天器及时地发现碰撞危险,并迅速地采取防撞机动。
预先给定碰撞概率密度的安全警戒值ρsafe及外推一段时间内的瞬时碰撞概率密度,可以得到该时间范围内最大碰撞概率密度ρmax,如果该值大于安全警戒值,则表明主动航天器需要提前采取防撞措施。
4 发动机故障情况下的轨道机动控制
主动航天器在得到需要采取防撞措施的指令后,可以根据C-W方程和预先指定的安全目标点,采取合适的机动操作转移至安全位置。但如果发生发动机失效的故障,根据C-W方程计算得到的主动航天器三轴轨道控制力可能会由于某一轴发动机的失效而无法实施,从而影响轨道转移的效果,甚至在机动后仍然会出现碰撞事故。
从式(1)的C-W方程可以看出,垂直于轨道平面(y轴)的两个航天器的相对运动是独立的,而轨道平面内(x轴和z轴)两个航天器的相对运动是相互耦合的,因此,如果这两个轴的某一轴发动机失效无法喷气,则可以通过另一个轴的耦合作用进行喷气控制。下面就针对轨道平面内某一轴发动机失效的状况设计控制律。
4.1 正常情况下轨道平面内的C-W机动控制
考虑轨道平面内的相对运动控制情况,式(2)的6×6矩阵可以简化为只包含轨道平面内相对状态的4×4矩阵,即
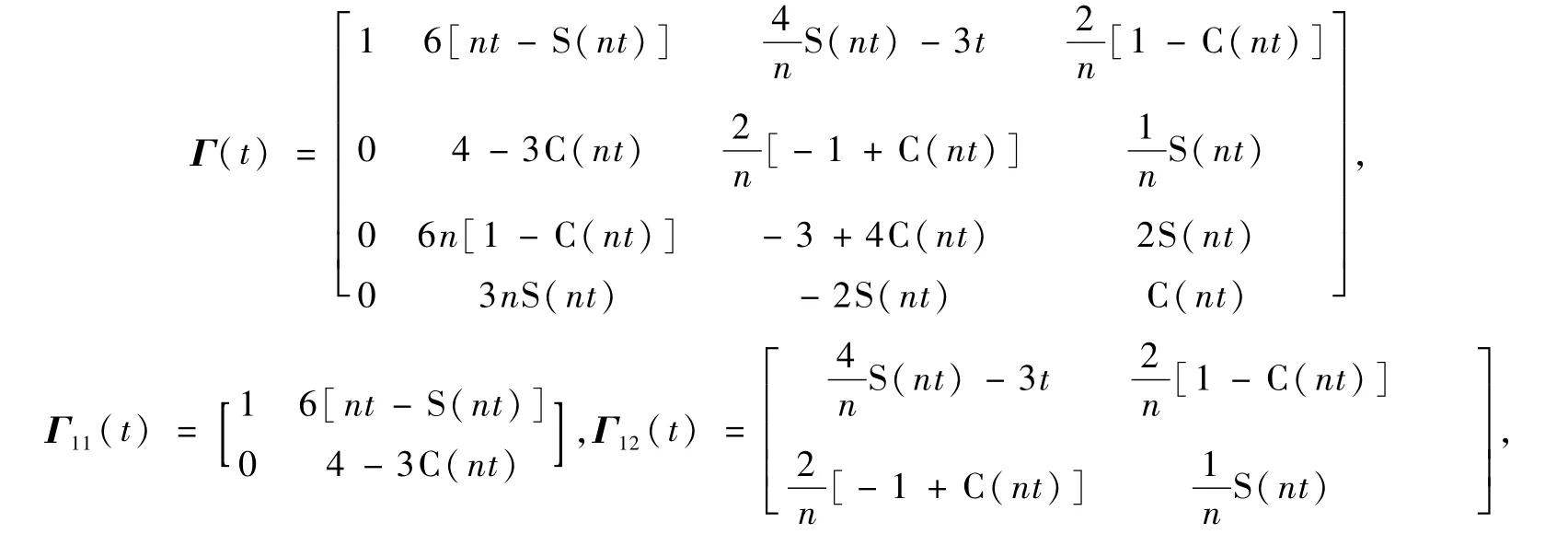


式中R0、V0分别为初始时刻主动航天器相对于目标航天器的位置和速度。ΔV=[ΔvxΔvz]T,即在机动初始时刻施加给主动航天器的速度增量。
当给定目标点的相对状态,就可以直接求解上式得到轨道转移机动需要的速度增量。
4.2 某一方向发动机失效时的C-W机动控制
假设主动航天器z轴的发动机失效无法喷气,则轨道平面内的状态转移矩阵变成

z轴发动机失效情况下的C-W机动为

给定转移的目标位置R(tf),则展开上式后可以得到相对位置的方程为

由于Γ′12是列满秩,可求得其广义逆为

则x轴所需施加的速度增量为

若x轴的发动机失效无法喷气,则可以省略状态转移矩阵中与Δvx有关的项,同样采用上述方法,可计算得到所需Δvz的大小。
4.3 发动机开关逻辑设计
实际的航天器上发动机是以有限推力方式工作的,且存在测量误差,因此需要实时地计算所需速度增量,当速度增量达到某一阈值时发动机开机工作,当小于某一阈值时关机。设开机阈值为Δ1,关机阈值为Δ2,且Δ1>Δ2。一般Δ1与允许的速度误差有关,Δ2与控制精度有关。发动机开机的判断逻辑为:

式中,fx(k)表示k时刻x轴的控制加速度,fx(k-1)表示k时刻的前一步x轴控制加速度,a表示加速度大小。
5 仿真分析
设目标航天器运行在600km高度的圆轨道上,主动航天器的质量为200kg,6个方向均配备一台10N的发动机,初始时刻主动航天器的+z轴发动机出现故障无法喷气,此时初始相对状态为X(0)=[-300 0-40 2.2 0 0.75]T,单位分别为m和m/s。给定初始相对状态的误差协方差矩阵为Cx0=diag{2,2,2,0.1,0.1,0.1},碰撞概率密度警戒值ρsafe为1×10-7,安全区域包络体的半径为50m。选择防撞机动的目标位置为[300 0 0]m,机动时间范围为[200 2500]s之间,即目标航天器半个轨道周期之内。
图3表示选择不同的机动时间t所对应的最大碰撞概率密度和需要的机动速度增量Δv,根据给定的碰撞概率密度警戒值ρsafe,可以将机动时间分成两个区域:一个是碰撞区,主动航天器选择在该区域内进行机动仍然存在与目标航天器发生碰撞的可能;另一个是安全区,选择在该区域内进行机动可以保证两个航天器的安全。同时还可以发现在该区域内机动所需的速度增量随着机动时间的增加而单调递增,因此机动的时间越短越节省燃料,最终选择机动时间为545s。

图3 机动时间对最大碰撞概率密度和速度增量的影响
图4和图5分别显示机动前后两个航天器在轨道平面内的相对运动轨迹和碰撞概率密度的变化。从图4可以看到,机动前主动航天器会进入目标航天器的安全区域,存在碰撞的可能,而机动后可以避开该安全区域,最终转移至预定的安全区域。从图5可以看到机动前的最大碰撞概率密度会达到9.5×10-7左右,而机动后的最大碰撞概率密度小于给定的警戒值。

图4 机动前后的轨道平面内的相对轨迹

图5 机动前后的碰撞概率密度
图6显示主动航天器x轴和z轴的推力变化,可以发现+z轴由于发动机失效不再产生推力,而通过控制力的耦合作用,主动航天器最终仍然实现了有效的轨道转移,验证了控制律的有效性。
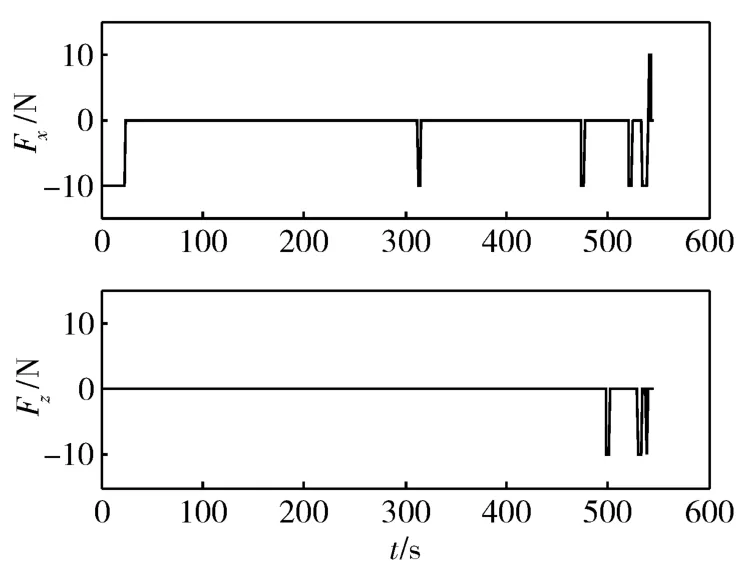
图6 x轴和z轴的控制力
6 结 论
本文针对交会对接中,在轨道平面内主动航天器某一方向发动机的失效情况,采用瞬时最大碰撞概率密度计算公式分析了两个航天器发生碰撞的可能性,并结合轨道机动的燃料消耗选择出一条最佳的防撞机动路径。同时,设计了在缺少某一方向推力情况下的轨道转移控制律,并通过仿真验证了该控制律的有效性,为航天器安全防撞提供了一个选择方案。
但本文所设计的控制律利用了轨道平面内相对运动互相耦合的特点,因此对于轨道平面外(y轴)发动机失效的情况不再适用。
[1] Fehse W.Automated rendezvous and docking of spacecraft[M].Cambridge,UK:Cambridge University Press,2003
[2] 朱仁璋,汤溢,尹艳.空间交会最终平移轨迹安全模式设计[J].宇航学报,2004,25(4):443-447
[3] Patera R P.General method for calculating satellite collision probability[J].Journal of Guidance,Control and Dynamics,2001,24(4):716-722
[4] Patera R P.Method for calculating collision probability between a satellite and a space tether[J].Journal of Guidance,Control and Dynamics,2002,25(5):940-945
[5] 王华,李海阳,唐国金.飞行器碰撞概率计算的一般方法[J].国防科技大学学报,2006,28(4):27-31
[6] 王华,李海阳,唐国金.基于碰撞概率的交会对接最优碰撞规避机动[J].宇航学报,2008,29(1):220-223
Collision Avoidance Design of Space Rendezvous in the Failure M ode
LU Shan,XU Shijie
(School of Astronautics,Beijing University of Aeronautics and Astronautics,Beijing 100191,China)
A new control law of collision avoidance maneuver(CAM)is designed using coupling effect under a thruster failure.The collision probability is used to analyze the collision probability of two spacecrafts.And a transfer trajectory of orbitmaneuver with safe and optimal fuel consumption is able to be selected in combination with the analysis of collision probability and fuel consumption.Simulation results validate that the CAM control law is effective under a thruster failure.
rendezvous and docking;collision avoidance maneuver;collision probability;thruster failure
V412
A
1674-1579(2008)06-0039-05
2008-08-08
卢 山(1982-),男,浙江人,博士研究生,研究方向为空间飞行器制导、导航与控制(e-mail:buaals@sohu.com)。
猜你喜欢
装备制造技术(2020年3期)2020-12-25 05:21:52
数学学习与研究(2020年15期)2020-11-28 07:22:43
当代陕西(2019年12期)2019-07-12 09:12:02
汉语世界(The World of Chinese)(2019年1期)2019-03-18 01:50:16
小哥白尼(趣味科学)(2018年12期)2018-12-18 02:13:58
汽车工程师(2018年1期)2018-07-13 00:47:56
中国公路(2017年13期)2017-02-06 03:16:33
民用飞机设计与研究(2015年3期)2015-12-07 12:09:31
数学年刊A辑(中文版)(2015年1期)2015-10-30 01:55:52
河北建筑工程学院学报(2015年2期)2015-04-29 12:23:52