EKF/UKF在编队飞行卫星GPS相对导航中的应用
2008-12-12 05:39:05楚瑞
空间控制技术与应用 2008年5期
楚 瑞
(西安邮电学院电子与信息工程系,西安710121)
EKF/UKF在编队飞行卫星GPS相对导航中的应用
楚 瑞
(西安邮电学院电子与信息工程系,西安710121)
航天器编队飞行协调工作,必须精确确定各航天器的相对位置和相对速度,即进行编队飞行相对导航。将扩展卡尔曼滤波(EKF,extended Kalman filter)和非线性滤波unscented Kalman filter(UKF)算法同时应用于编队飞行卫星的载波相位差分GPS相对导航。EKF与UKF算法原理不同,UKF算法的精度比EKF的精度高。在实际应用中,可以将两种算法组成互为备份的相对导航滤波器,这样可提高滤波系统冗余性能。
扩展卡尔曼滤波;UKF;载波相位差分GPS;编队飞行卫星;相对导航
1 引 言
随着现代小卫星技术的迅速发展,20世纪90年代后期出现的一种新的卫星组网方式¯¯¯卫星编队飞行[1]。在运行过程中,小卫星间始终保持较近的距离,彼此密切联系,通过星间通信和信息耦合互相协同工作,就象一颗大卫星一样完成某项空间任务。
编队构型的保持和控制需要精确确定航天器间的相对位置和相对速度,即相对导航[2]。当前航天器近距离相对状态的确定往往采用C-W方程(即Hill方程),而在一般情况下航天器间的相对运动是非线性的,编队飞行的精确导航需要引入各种相对测量装置进行相对距离、相对速度和视线角度等观测测量,观测量与滤波状态所具有的非线性加剧了滤波的非线性性,目前对于非线性模型的状态估计广泛采用EKF和UKF。EKF采用非线性系统的线性化模型,只能达到一阶精度。UKF采用粒子滤波的采样思路,通过仔细选择高斯随机变量采样点(即Sigma采样点)最小集合来近似系统的估计状态,当通过非线性方程演化后,它们以二阶精度近似非线性系统状态的验后分布,且UKF不需要进行Jacobian和Hessian矩阵计算,整体滤波计算的复杂度与EKF相同。本文研究了基于EKF/UKF滤波技术的多航天器编队飞行卫星相对导航,并对结果进行分析比较。
2 非线性系统滤波方法简介
2.1 EKF滤波
不失一般性,非线性系统可表示为[3]

式中,xk∈Rn表示系统状态量,vk∈Rq表示系统过程噪声,yk∈Rp表示系统输出,wk∈Rr表示系统观测噪声。
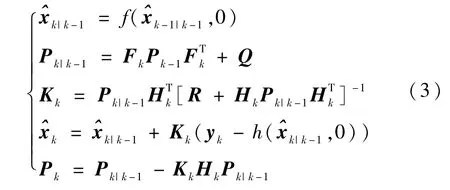
式中,P为状态误差协方差矩阵,Kk为卡尔曼增益矩阵,Q为过程噪声协方差矩阵(假设为零均值高斯白噪声),R为量测噪声协方差矩阵(仍然假设为零均值高斯白噪声)为过程模型Jacobians矩阵,为量测模型Jacobians矩阵。
2.2 UKF滤波
对于UKF,这里仍采用如式(1)所示的系统状态描述[4],其滤波算法描述如下:
1)初始化
若过程噪声v和量测噪声w具有可加性,X是Sigma点向量,P0是非线性状态向量的初始协方差,Q和R分别是非线性部分过程噪声协方差和量测协方差矩阵。设置初始值如下:

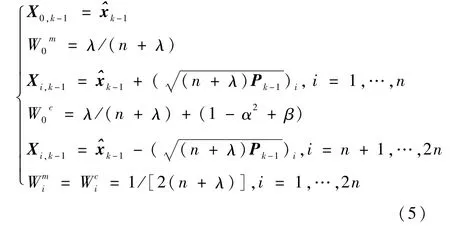
2)计算Sigma采样点式中,λ=α2(n+k)-n,常数α用于确定Sigma采样点在其均值附近的分布情况,往往给定一个小的正值,针对不同的非线性状态配置不同的λ值将有助于状态滤波的收敛以及滤波精度的提高,k通常被置为零,β包含x分布的先验信息,通常被置为一个小的正值,是矩阵平方根的第i列是均值和协方差阵的权值,上标m和c分别表示均值和协方差。
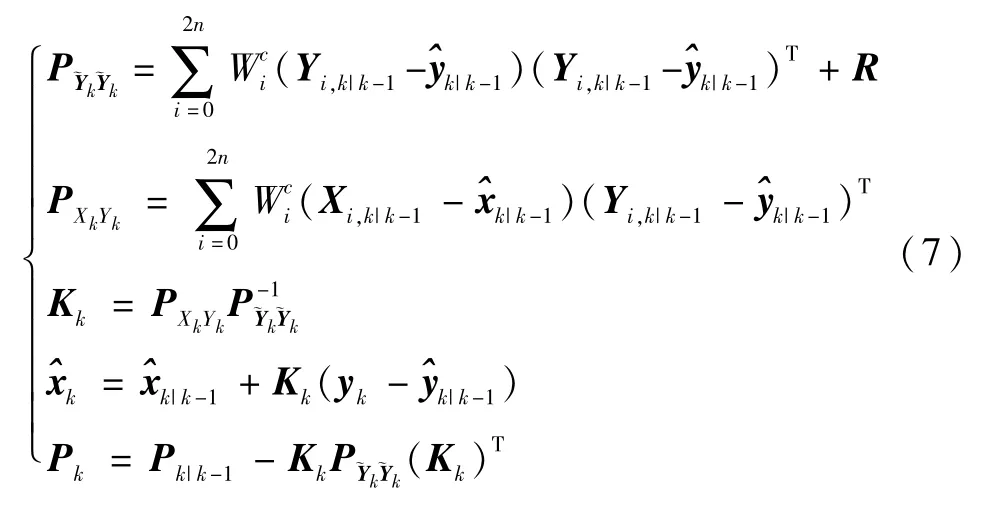
(3)非线性状态的预测与更新
预测:
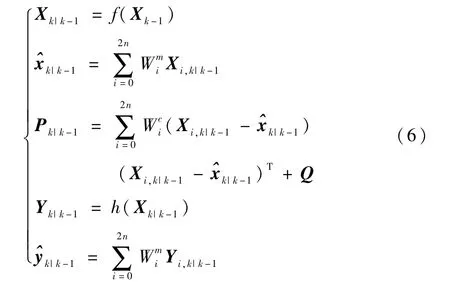
更新:
3 编队飞行GPS相对导航
3.1 系统状态方程
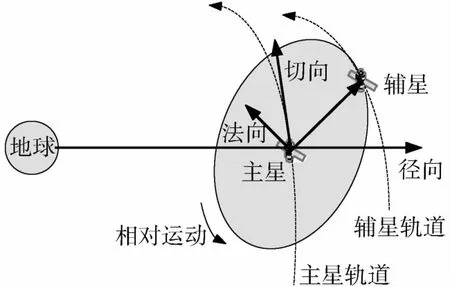
图1 相对轨道示意图
如图1所示,定义相对轨道位置向量为ρ=[x y z]T,相对速度向量为相对轨道运动学方程为[5]
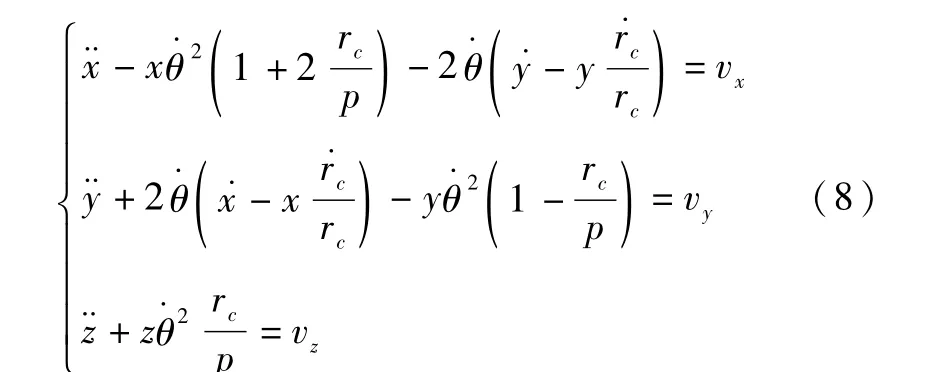
式中,p表示主星轨道半通径,rc表示主星轨道地心距,表示主星真近点角速度,vx,vy和vz表示相对运动扰动项,采用零均值高斯白噪声近似表示。真近点角加速度和主星轨道半径加速度为
若主星轨道为圆轨道,则˙rc=0,p=rc,上述相对轨道运动学方程(8)、(9)简化为如下著名的HCW(Hill-Clohessy-Wiltshire)方程:
3.2 系统观测方程
GPS载波相位测量方程为[6]

主星与辅星的载波相位单差方程为

在载波相位单差方程中,导航星钟差被消除,在这里假设各编队卫星是完全相同的,所以线偏差也被消除,观测方程离散化后噪声的协方差矩阵为R。如果编队参考星与伴随星的距离为百米级,可以认为它们到同一导航星的视线矢量相同,则可表示为

式中,sj为编队参考星到第j颗导航星的视线向量。实际应用中可以通过伪距定位与接收星历数据中包含的导航星坐标信息来确定。
对于钟差项,可以用如下二阶马尔可夫过程进行模拟:
式中,τ为钟差项,f为频漂项,Sτ为钟差,Sf为频漂的噪声谱密度。
4 仿真结果
本仿真以相对距离1km左右对地观测双星编队为例,进行相对导航滤波解算。编队卫星轨道参数如下表1所示:

表1 编队卫星轨道根数
GPS数据根据官方服务网站提供,将上述编队卫星轨道参数与GPS参数输入STK软件进行仿真,得到实时GPS测量数据,在MATLAB下进行滤波仿真,仿真结果如图2~3所示。
由仿真计算得到EKF滤波算法均方根(相对位置为:径向0.05435m,切向0.03568m,法向0.03148m;相对速度为:径向0.018354m/s,切向0.017326m/s,法向0.011376m/s),UKF算法均方根(相对位置为:径向0.01168m,切向0.01453m,法向0.01248m;相对速度为:径向0.009523m/s,切向0.006789m/s,法向0.008356m/s)。
以上数据明显看出,UKF算法精度高于EKF算法,其本质在于对非线性系统的处理思路不同,UKF算法采用粒子滤波采样的思路,当通过非线性方程进行演化后,它们以二阶精度近似非线性系统状态的验后分布,而EKF只能达到一阶精度,
但UKF算法的缺点是计算速度慢,根据仿真条件(P4 1.6/ddr333 256/40G)可以定量分析出两者计算速度:运行一次仿真,EKF需10.3s左右,而UKF需40s左右。
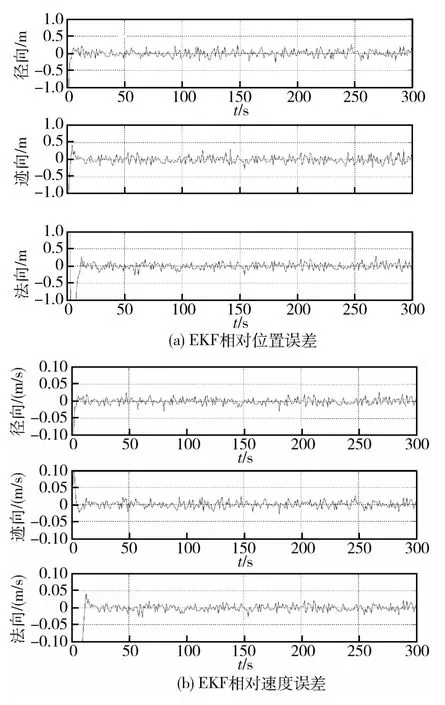
图2 EKF相对误差
5 结 论
载波相位差分GPS以其高精度而受到普遍重视,在地面的测量中得到广泛的应用,上世纪90年代以后在航天相对导航中逐渐得到应用,其体积小、质量轻,非常适合在编队小卫星载荷受限制的情况下代替现在普遍采用的导航设备实现编队的自主相对导航。
本文运用EKF/UKF滤波算法进行相对导航解算,从结果可以得到两种滤波算法都达到很高的相对导航精度。但EKF算法仅利用非线性系统在状态预测处的一阶泰勒展开,而UKF算法采用Sigma点对状态进行采样,使得采样点统计特性与状态变量一致,其精度可达到二阶以上泰勒展开水平。因此使得UKF算法精度比EKF算法精度高,但以计算时间加长为代价。在实际航天器应用中,可以将两种算法组成互为备份的相对导航滤波器,星载计算机繁忙或导航精度要求不高时,采用EKF进行滤波解算,要求提高导航精度时,采用UKF算法,以提高整个相对导航滤波系统的冗余性能。
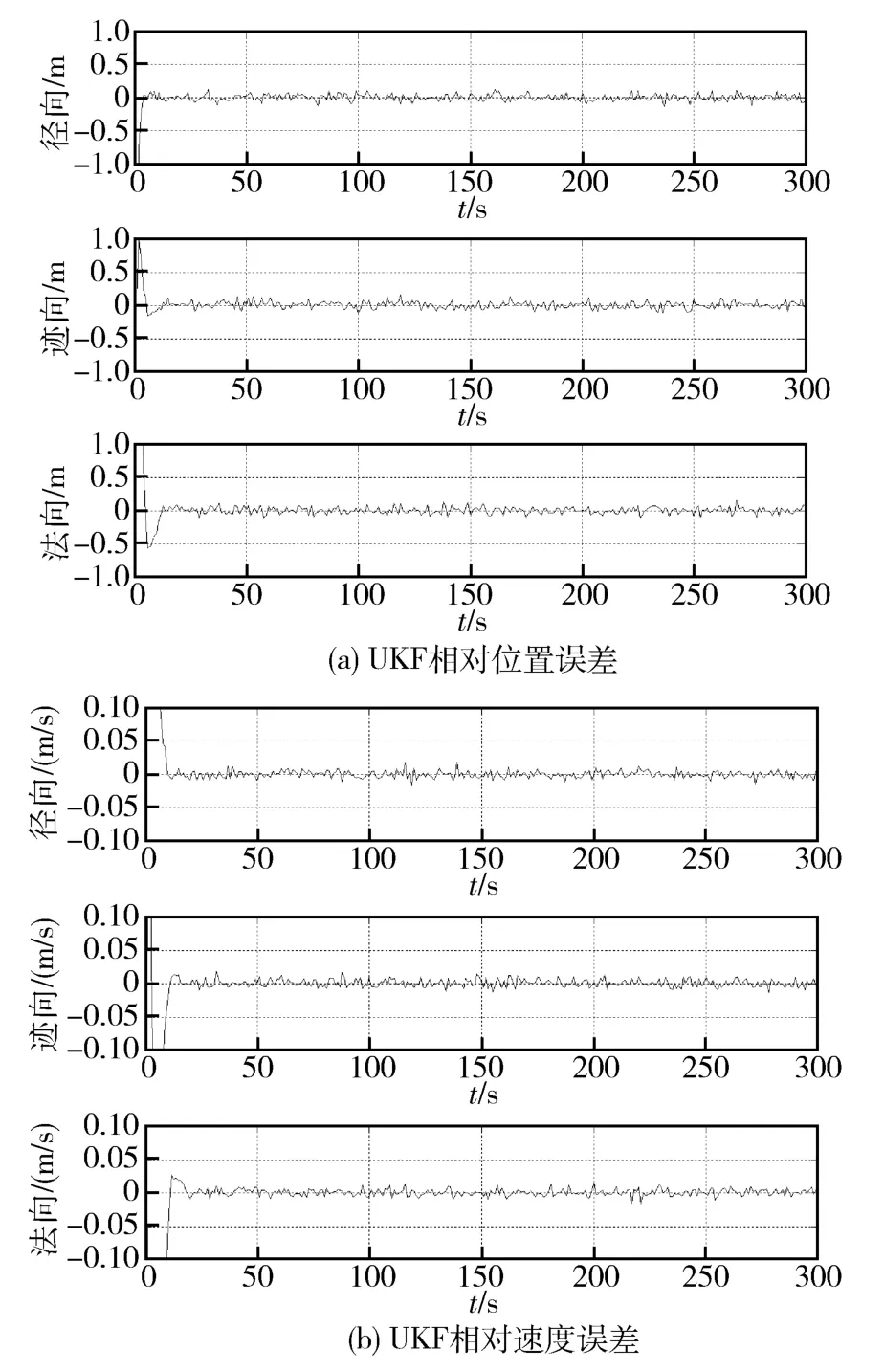
图3 UKF相对误差
[1] 张洪华,林来兴.卫星编队飞行相对轨道的确定[J].宇航学报,2002,23(6):77-81
[2] Michael F,Herve M.Relative GPS navigation for ATV rendezvous[C].ION GPS295 Conf.,California,PalmSpring,1995
[3] Minkler.Theory and application of Kalman filtering[M].Magellan Book Company,1993
[4] Julier S J.A new method for the nonlinear transformation ofmeans and covariances in filters and estimators[J].IEEE Trans.on Automatic Control,2000,45:477-482
[5] Xing G Q.Shabbir A P.Relative attitude kinematicsamp;dynamics and its applications to spacecraft attitude state capture and tracking in large angle slewing maneuvers[C].Space Control Conference,MIT Lincoln Laboratories,April,1999
[6] Hofmann W,Lichtenegger H,Collins J.GPS theory and practice[M].New York Springer,1992-1993
App lication of EKF/UKF in the GPS Relative Navigation for Form ation Flying of Spacecrafts
CHU Rui
(Department of Electronics and Information Engineering,Xi'an Institute of Postamp;Telecommuni cations,Xi'an,710121)
Accurate relative position and velocity determination are required for formation flying of spacecrafts.The comparison of EKF and UKF algorithms for relative navigation based on carrier differential global position system for formation flying is given in this paper.Simulation results indicate that the UKF has better accurate but longer computation time than the EKF since difference of filter's principles.Both filters are used in practical application for consideration of navigation system redundancy and reliability.
extended Kalman filter;unscented Kalman filter;carrier differential global position system;spacecrafts formation flying;relative navigation
TP391.9 V448
A
1674-1579(2008)05-0057-04
2008-05-26
楚瑞(1978-),女,陕西人,助教,研究方向为先进控制理论与应用(e-mail:churui@xiyou.edu.cn)。
猜你喜欢
军事文摘(2023年5期)2023-03-27 08:56:26
北京航空航天大学学报(2017年3期)2017-11-23 05:14:41
自动化学报(2016年8期)2016-04-16 03:38:55
无线电通信技术(2015年3期)2015-12-23 11:37:00
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
海军航空大学学报(2015年4期)2015-02-27 13:45:56
导航定位与授时(2014年2期)2014-04-27 13:41:08
电子设计工程(2014年20期)2014-02-27 12:01:00
中国科学技术大学学报(2013年8期)2013-03-11 20:18:37