深水半潜式钻井平台锚泊系统技术概述
2007-01-28 06:51:16
船海工程 2007年3期
中国船级社 北京 100007
为了满足在深海的恶劣环境条件下进行钻探等工程作业的需要,必须在较长一段时间内精确地保持半潜式平台在海面上的位置,但是半潜式平台对于水平面内的运动不具有回复力,这就需要安装定位系统,平衡作用在浮体的外力,减小浮体的水平运动,使其不致发生位移。近年来,为了适应深海钻探的要求,出现了不采用锚的自动动力定位系统(dynamic position)以保持井位。它可以在锚泊有极大困难的海域作业,如极深海域、海底土质不利于抛锚的区域等等;另外动力定位机动性好,一旦到达作业海域,立即可以开始工作;遇有恶劣环境突袭时,又能迅速撤离躲避。但是全动力定位系统初始投资和营运成本都比较高。海上的定位,最普遍的还是锚泊系统(mooring systems),这种方法很早就在船舶上应用,具有结构简单、可靠、经济性好等优点。由于开采石油向深海的发展趋势,这对深水锚泊装置提出了更高、更严格的要求,并使得其设计、建造、使用操作等方面都增加了困难,因此对深海半潜式平台的锚泊系统的研究具有重要的意义,也具有很大的发展空间和研究价值。为了满足深水锚泊的要求,对锚泊系统方面的改进主要从锚索材料、锚的设备、设计研究方法等方面进行[1-2]。
1 锚泊线状态
锚泊系统可以分为柔性和刚性两种形式。柔性系统包括悬链线锚泊(SMS)(见图1)和张紧式锚泊(TMS)(见图2)。这两种锚泊系统的工作机理都与弹簧类似,分别用锚泊线的垂向悬链线效应或锚泊线伸长的弹性效应引起的恢复力,使作用在浮体水平面内的外力传递到海床上,使平台保持允许的位移。
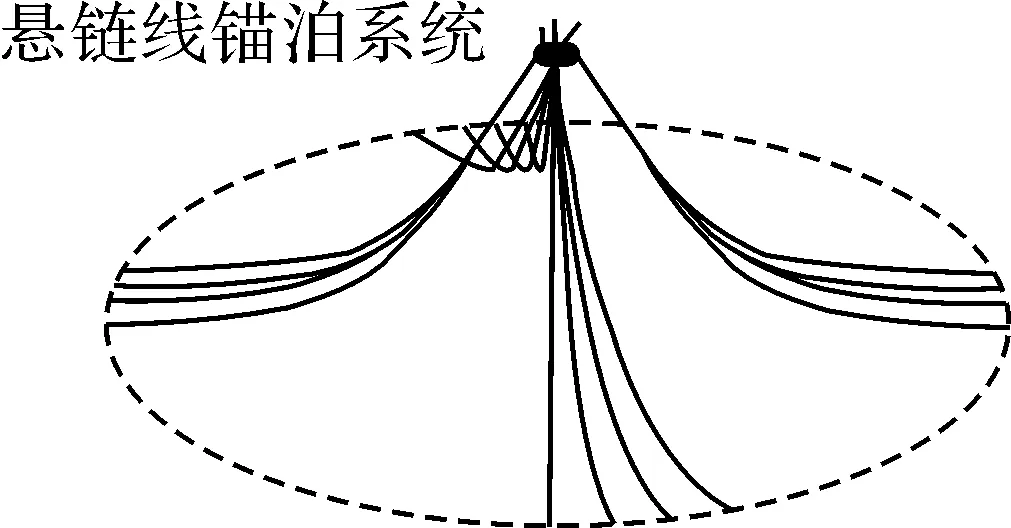
图1 悬链线锚泊示意图
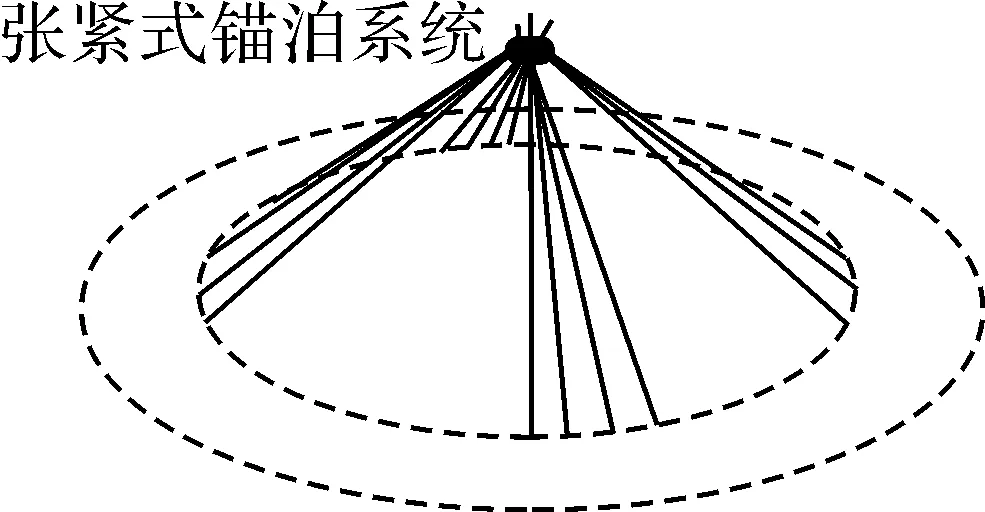
图2 张紧锚泊示意
悬链线锚泊系统即传统展开式锚泊系统,具有悠久的使用历史,能适应较恶劣的海洋环境,在当前的深水海洋油气浮式生产结构定位技术中仍然占有重要的地位[3]。悬链线锚泊由标准的悬链线方程定义,它与锚缆的淹没重量、水平锚泊载荷、锚泊线张力、导向孔处锚泊线的角度等因素有关。悬链线锚泊系统的受力由锚泊线的几何变形和轴向弹性变形一起来确定。锚泊线的几何变形使横向拖曳力对锚泊系统产生的影响较大。
由于水深的增加导致了传统的钢质锚链和钢筋束系统的自重增加,水平刚度减小,造成了锚泊的有效性变差。另外在深水中悬链线形状的锚泊系统覆盖着相当大的区域,严重地影响到当地管线与缆线的敷设和其它船舶在该水域的锚泊。为了解决这一问题,传统的呈悬链线形状的锚链已逐渐为张紧或半张紧形状的锚泊线所代替,锚泊线质量相对较小,在锚和导缆孔之间呈张紧状态,从而减小了锚缆覆盖的区域。张紧锚泊系统没有经历大的横向几何改变,恢复力完全由锚泊线的轴向弹力来提供。但是受力方式的改变,使锚基受到了会随着锚泊线的长度的增加而减少的垂向力作用,因此张紧或半张紧形状的锚泊系统对锚基要求更高。
2 锚泊线材料
锚泊线材料的成分选取除了考虑锚泊线状态的要求外,还要考虑磨损破坏、老化和疲劳寿命等因素。不同类型的锚泊线,如锚链、合成纤维绳、钢丝绳等或它们之间的组合都已有应用。
锚泊线一般由钢丝绳和锚链组成,有时由于布置形式的需要,还要加上重块和浮筒。锚链耐磨损、不易破坏,但一般较重,造价也高。对于悬链锚泊系统而言,锚泊线的长度与水深成一定的比例关系。水越深,锚链越粗重,船体需要承担锚泊线悬链部分的重量。深水半潜式平台的锚泊系统需要的锚泊线长、尺寸大,因而深海锚泊系统设计面临着垂向载荷增加、水平恢复力降低、漂移增大和锚泊半径大等问题。
在深水锚泊系统中,为了降低重量和成本,一般不采用全链系统。由于同样的断裂强度,钢丝绳比锚链轻得多,悬浮部分常常采用钢丝绳代替锚链,增加系泊链的强度,减少上部张力。但钢丝绳的抗磨损能力差,与锚连接并触底的一段依然采用锚链。金属索通常多根缠绕在一起,形成复杂的结构,有螺旋形、6股或多股等缠绕形式。随着水深的增加,锚链-钢丝绳组合系统的优越性越来越明显。当产生相同的位移时,锚链-钢丝绳这样的多成分系统的回复力明显大于全索链系统[4]。
在超深水的恶劣环境条件中,平台的锚泊系统的设计与以往的平台有很大的不同。由于自重大,水平刚度小,锚链-钢丝绳系统无法承担外载荷,这些传统的悬链线形状的布置形式被张紧式的布置形式所代替。材料和构成都不同的合成纤维绳由于具有强度/重量比大、弹性好、成本低等优点,已经广泛代替锚链和钢丝绳。合成纤维绳的材料包括尼龙、聚酯、聚乙烯、聚丙烯等。这些新的锚泊材料的使用给工程提供了更多的选择,但是与锚链和钢丝绳相比,合成纤维绳显示出来更加复杂的非线性作用,这使得其相关的机理特性、动力因素的模拟等方面需要进行更深入的研究,为深水锚泊系统中的使用提供更有效和精确的理论支撑。
3 锚设备的型式
锚是保持平台固定在一定位置的关键设备。随着锚的移动,传统的拖曳嵌入式锚的锚泊线张力能够在锚链之间进行相互调整,即使在恶劣的环境下,锚产生一定运动后还能具有相当大的维持能力。
但是随着水深的增加,平台的锚泊定位系统有时要求考虑垂直方向的载荷,传统的拖曳嵌入式锚只能产生水平方向的抓力,难以在深海的工作环境中发挥效用。另外锚泊线材料、状态,海床状况的改变也需要在不增加锚重的条件下提高抓力,这都导致了可以抵御垂直载荷的锚泊设备及其基础出现新的形式[5]。国内外陆续开发了一些不同于传统的拖曳嵌入式锚的其他形式的深海锚泊,以满足深水域内对大抓力深海锚泊的设计需求和发展趋势。
4 模型试验
模型试验是研究新形式、复杂结构的平台运动和锚泊受力等水动力性能最重要的方法,可以帮助了解影响锚泊系统的因素,比数值模型更能反映平台在海中的性能。数值模拟的验证以及数学模型中众多的水动力系数的校准也主要依赖于平台及其锚泊系统在给定的海洋环境中的模型试验结果,因此,平台及其锚泊系统的模型试验是推进数值模拟的基础。
比例尺的影响在物理模型试验中扮演了重要的角色。尤其是带有扩展式锚泊系统的平台要求实验时所占的海底面积的半径约是水深的五倍,这对缩尺比的要求更加高,更加难处理。一般认为缩尺比在1∶50~1∶100之间取值是比较合理的。当采用缩尺比大于100的超小比例模型试验时,毛细现象(表面张力)、粘性等因素所产生的影响都不可忽略,再加上造波能力的限制,水域的加深对于传统的模型比例的要求已超过现有的试验水池的能力[6]。目前,实验室中可以采用的最大的比例尺为1∶170。
在实际工程中,许多深海平台的工作水深已达到3 000 m,并仍有向更深海域进军的趋势。所以国际海洋工程界的学者们面对由于尺度上的限制,无法完成全深水锚泊系统模型的现状,提出了几种解决的途径。其中用截断锚泊线的混合试验方法(hybrid model testing technique)成为最有效的解决办法。在实验后需要对模型试验中截断的部分进行数值重构,因此这是将理论数值计算模型和物理试验模型结合起来的试验方法,是一种强有力的深水平台研究工具。
5 数值模拟
随着水深的增加,由于模型大小、水池尺度、水池造波机的能力等因素的限制,深海中的锚泊系统很难进行整体结构的模型试验。而且锚泊系统的实际工作环境十分复杂多变,难以在实验室中进行全面的模拟。因此尽管模型试验是一种相当有效的研究手段,但仅有这种手段不能确保得到令人满意的设计。这意味着模型试验应和理论分析方法与计算机模拟应同时进行,使得锚泊系统的数值模拟变得越来越重要。而且,复杂的浮体/锚泊线/立管系统响应的理论对于发展混合模型试验也是很必要的。
由于平台向深海发展,用传统的计算方法预测几何形状、载荷、海底摩擦等原因引起的锚泊线的强非线性和平台系统的响应不再有效。因此,在深水数值模拟中,动力模型代替了准静力模型,非线性时域方法代替了频域线性方法,耦合分析代替了非耦合分析。这些深水锚泊系统的数值模型对于计算机能力的高要求使许多问题有待解决。
5.1 锚泊系统静力分析
锚泊系统的设计,在许多情况下要决定锚索在静止情况下的形状及张力分布。特别在定位问题中,常需要知道被系泊结构的位移与张力的关系。因此,锚索的静力学问题在工程上有很大的实际意义。浮动平台的锚链系统一般由多根锚链组成,作用在锚链上的力有水动力、重力和张力等,具有明显的非线性特征,但对锚链动力分析进行数值计算时需要很长的计算时间,为简化计算,一般在方案设计阶段没必要进行很详细的动力分析,这时往往做一些简化,以快速得到系统的运动和受力特性,供设计参考[7]。准静力分析方法计算简便,与各种规范中较大的安全系数相配合后,能够满足一定的精度要求,大量的工程实践已经证明了其安全性。该方法目前仍具有一定的生命力,可以作为初步设计的依据,也可以作为动力分析的基础。通过锚泊系统的准静力计算可研究在稳态载荷作用下锚泊线的受力和形状,对锚泊系统布置形式、锚泊线材料和成分等特征参数进行优化选择[8]。
准静力分析中忽略了导索点的垂直运动、锚泊线的变形,以及与锚索质量、阻尼、流体动力有关的动力效应,用2D代替了3D效应。由于假定条件过多,虽然计算简单并有解析解,但结果精度不足,尤其是当锚链上作用的流体作用力较大或锚链线有三维运动效应或锚链线有弹性变形时,结果更差。对于锚泊线本身的载荷来说,在水深不大的情况下,应用准静定假设所得到的结果是可以应用的,但是当水深较大时,准静定分析将低估锚泊线的受力。随着人们对锚泊系统研究的深入,传统的准静力分析方法受到了挑战。
5.2 锚泊系统动力分析
准确预估半潜式平台在风、浪、流等环境条件的作用下运动所导致的锚泊线张力变化的动力特性对平台锚泊系统的设计、安全和操作都有着重要的意义。由于各种原因过去虽然也认识到动力分析的重要性,但是设计时往往忽略动力作用。随着水深的增加,动力分析越来越重要。
在深水平台的锚泊系统中,锚泊线长,尺寸大,对应的强度也大;风、浪、流的影响也不同于一般的水深,受力越来越复杂。在同一动力载荷条件下,不同结构的动力反应是不同的,反应的大小与结构的自振频率有着直接的关系。在不规则波中,差频分量的频率很低,与浮体-锚泊系统的水平振荡频率相接近,会造成上部浮体在水平方向上做大振幅低频振荡,在锚链中诱发很大的张力,甚至导致破坏。而和频波浪力的频率较高,会与浮体-锚索系统的垂向振动频率相接近,造成浮体在垂向的持续振荡,引起锚索的疲劳。在设计和施工中应特别注意锚泊系统的动力特性,以避开与海浪产生共振,从而避免锚索疲劳破坏。
在共振响应下,阻尼对系统的振荡幅值有重要的影响,波浪阻尼是其中的一项重要部分,有时还会出现负值,使整个系统的阻尼水平有所降低,造成振动幅值的加大。锚泊系统随结构一起运动,它不仅提供复原力,限制船体的运动,同样将提供慢荡阻尼。对于给定的锚泊布置方式,所产生的阻尼的比例将随水深的增加而增加,最多可以占到所有阻尼的80%。要精确预报系统的运动,正确估算这一阻尼部分,必须考虑由流体载荷、锚泊线的阻尼、惯性质量和回复力的影响。再加上水深的增加,非线性的影响也增加。在这些情况下,都需用动力分析模型用来替代准静力分析模型来进行分析。过去几十年来,已建立的一系列计算锚泊线动力问题的模型,总的来说可以将这些方法归结为时域和频域两种解法。
另外,工程中风险的可靠性评价要求的提高,平台服务寿命的延长,新型系泊系统的出现和新材料的采用也导致锚泊线动力特性与传统的有较大差别等原因,使动力学分析显得越来越重要。而计算工具的发展使得非线性、多自由度系统动力分析的成本降低,也使得在设计中可以更精确地计入锚泊线的动力载荷[9]。深水平台对计算方法的要求使得一些组织对平台设计规范和规则进行了修改。API规范就建议将准静力分析方法的应用范围限制在初步设计阶段,而对最终设计阶段采用动力分析法。
5.3 锚泊系统与浮体的耦合计算
当前海洋深水开发所用的浮式平台系统多为平台与锚泊系统的耦合体,这样,平台与锚泊系统之间必将有相互影响及相互作用。但是以往作平台的波浪响应分析时,锚泊系统的作用一般是忽略不计的或只考虑静力回复力,而没有将它们同平台作为一体进行动力计算。平台的运动和锚泊系统的载荷影响一般都是先由线性频域过程的绕/辐射理论计算上部平台的运动和受力,然后根据非线性时域理论,利用根据得到的平台运动量来计算锚泊线的动力载荷响应。这种分离的计算用简化的方法处理了低频运动的锚泊系统的重要阻尼影响,没有考虑平台的波频运动对锚泊系统的动力响应。随着水深的增加,锚泊系统与平台的相互影响越来越显著,简化计算的结果其精确性越来越低。
因此,平台和锚泊系统不能单独计算,必须作为一个整体来考虑。耦合分析已经成为深水中设计和检查方式的主要推荐的方法。
耦合分析方法可分为时域和频域两种解法。传统的频域分析计算简单、快速,可以直观地在一定程度上表现平台的锚泊系统慢荡运动产生阻尼的机理以及主要的控制因素等系统特征[10],被广泛用于实际海洋工程结构的设计中。但是在应用频域法时,所有的非线性项都要进行线性化,因为频域法原则上只是用于线性系统,如要正确处理好非线性情况,时域分析方法显而易见是最为有效的方法[11]。时域解法在模型化时可考虑所有的非线性、漂移力作用与粘性阻尼的影响。这种方法在每一时间步长上,对每一质量项、阻尼项、刚度项和载荷项都必须重新计算,进行结构物与锚系的耦合求解,计算比较复杂费时,但是这种处理方法在工程上有较广的适用性。
6 结束语
目前,海洋油气资源开发向深海发展已成为必然趋势,深水平台的数量随之迅速增长。随着水深的增加,锚泊系统的各个方面的研究方法、设计方法都有所不同,传统的设计和分析方法不再适用,数值和物理模型的研究也成为巨大的挑战。在深水平台锚泊系统中,锚泊线的布置方式发生了改变,合成纤维绳也取代钢质锚链作为锚泊线材料,吸力式沉箱锚等不同锚设备也代替了传统的拖曳锚。这些改变也促使新材料的机理、各种恶劣的环境条件下系统的动力行为、船体-锚泊系统的耦合计算研究,以及各种物理模型实验技术的进一步发展。
我国目前已经具备200 m水深内的自主开发能力,最深可达300 m,但与目前国际上公认成熟的作业水深1 500 m相比还存在较大差距,应该积极进行深海技术的储备,进一步开展深海平台技术的研究,为深海开发创造条件。
[1] 李润培,谢永和,舒 志.深海平台技术的研究现状与发展趋势[J].中国海洋平台,2003,18(3):1-5.
[2] 王言英,肖 越.深水锚泊的新概念与新技术[J].船舶工程,2004,26(2):1-3.
[3] 余 龙,谭家华.深水中悬链线锚泊系统设计研究进展[J].中国海洋平台,2004,19(3):24-29.
[4] 余 龙,谭家华,深水多成分悬链线锚泊系统优化设计及应用研究[J],华东船舶工业学院学报,2004,18(5):8-13,8-13.
[5] 徐 蓉,何炎平,谭家华.几种新型深海锚泊形式概念[J].中国海洋平台,2005,20(2):30-33.
[6] 张火明,杨建明,肖龙飞,深海平台混合模型试验方法应用技术研究[J].中国海洋平台,2006,21(1):16-19.
[7] 滕 斌,郝春玲,韩 凌.Chebyshev多项式在锚链分析中的应用[J].中国工程科学,2005,7(1):21-26.
[8] 黄 剑,朱克强.半潜式平台两种锚泊系统的静力分析与比较[J].华东船舶工业学院学报,2004,18(3):1-5.
[9] 王 林等.海洋深水钻井锚链的动力特性探讨[J].西南石油学院学报,2004,26(5):24-26.
[10] 肖 越,王言英.浮体锚泊系统计算分析[J].大连理工大学学报,2005,45(5):682-686.
[11] 石 山,冉志煌,漆春茂.海洋工程深水开发浮式系统的耦合计算方法[J].中国造船,2005,46(4):47-51.
猜你喜欢
江苏船舶(2023年2期)2023-06-14 11:07:44
船海工程(2021年6期)2021-12-17 03:17:44
船舶标准化工程师(2020年1期)2020-06-12 09:16:24
当代陕西(2019年8期)2019-05-09 02:23:00
武汉理工大学学报(交通科学与工程版)(2015年5期)2015-12-05 02:19:55
中国卫生(2015年8期)2015-11-12 13:15:16
江苏科技大学学报(自然科学版)(2015年3期)2015-03-07 08:27:44
船舶力学(2014年5期)2014-01-19 05:50:04
水道港口(2013年2期)2013-04-27 14:14:16
船舶力学(2011年11期)2011-06-22 05:06:42