电梯永磁同步曳引机封星制动转矩提升方法
2025-03-07 00:00:00胡亚山商志国李永岗周根富杨亚军
湖南大学学报·自然科学版 2025年2期
















摘要:电梯接触器封星和传统电子封星存在中高速阶段封星制动转矩下降的问题,为保证电梯在中高速失控时安全有效地制动,提出一种基于最优电阻的永磁同步曳引机电子封星制动转矩提升方法,不需要额外装置,利用原有驱动系统实现制动转矩的提升. 电机的定子电阻不同,传统电子封星下的制动转矩特性不同,通过分析电子封星下某一固定脉冲宽度调制(pulse-width modulation,PWM)占空比下的电压和电流关系,揭示虚拟电阻与占空比的关系.根据当前电流幅值、母线电压和转速动态地调整PWM占空比,进而改变永磁同步曳引机的等效电阻,与产生最大制动转矩的最优电阻匹配,以此来达到提高电子封星制动转矩的目的. 通过实验验证了本文方法的可行性和正确性,电梯在中高速时的制动转矩相较于传统电子封星有明显的提升.
关键词:电梯;封星;制动;转矩提升;最优电阻
中图分类号:TM351 文献标志码:A
随着永磁同步曳引式电梯技术的发展,对电梯的安全性要求越来越高. 在一些使用场景中,可能发生上行超速、溜梯等轿厢意外移动的情形,工作制动器是整个电梯安全系统的保障,工作制动器不但要承担正常的制动功能,同时还要承担轿厢意外移动制动的功能. 在制动器异常情况下,电梯轿厢质量和对重侧质量不匹配,轿厢受到不平衡力而产生一定的加速度,进而引起轿厢意外移动,造成一定的安全风险[1-2]. 为了保障电梯能够有效地减速或限制电梯速度,通常采用短接电机三相输入,此时跟随曳引机旋转的绕组线圈会切割永磁体形成的磁场而产生磁感应电流,通过接触器封星短接产生反向电磁力矩,来抵消部分曳引机转速,从而使永磁同步曳引电机永磁体产生的制动力使电梯减速或限制电梯速度,避免电梯失控冲顶或蹲底,由此降低风险[3-4].
目前,电梯控制系统常用的封星方法有接触器封星和电子封星. 接触器封星要承受封星后的大电流,通常体积较大并且成本较高. 此外,接触器寿命较短,在开关动作次数较少之后就要进行更换[5]. 电子封星变频器无故障的前提条件下,在变频器封锁上(下)桥臂驱动信号的同时,控制下(上)桥臂的开关管导通,实现短接电机三相输入. 封锁所有上桥臂(或下桥臂),能量只能从电机侧流入母线侧,可以有效避免电机处于电动状态产生电动转矩,满足电梯电子封星系统中安全转矩取消(safe torque off, STO)功能[6]的要求. 由于制动器和变频器同时出现故障的概率很低,且电梯具有限速器安全钳联动机构和油压缓冲器等安全措施,采用电子封星代替接触器封星,在满足安全规范的前提下可以实现对电梯控制系统的简化[7],降低成本,提高可靠性.
接触器封星或电子封星初期有较大的不平衡电流. 王翊仲等[8]、冯云[9]和罗旋旋等[10]采用一种延时封星方案,在降低封星初期的不平衡电流的同时,能够实现切断电机的供电电源,同时避免封星初期过大的电流冲击,以最大的制动力实施封星制动. 合理地选择封星接触器并配以合理的延时电路有助于提高电梯的安全性. 郭威等[11]提出可以在电梯需要实施封星制动时,依据电机转子永磁体的当前相位与下桥臂开关管闭合时的磁极相位的相位一致次序时,先后将封星保护信号传给逆变器的各下桥臂开关管,通过保护信号控制电流的初期相位,抑制封星制动初期的不平衡电流,避免逆变器以及电机受到过大的电流冲击,但该策略不能保证足够的封星制动转矩.
为了提升封星制动转矩,李辉等[12]在电机绕组回路中串入合适的电容,可以实现低速或高速时封星转矩的提升,但其是以增加成本为代价的. 何栋林等[13]、梁丙雪等[14]分析了永磁同步曳引机参数对封星制动力矩的影响,改变电机的定子电阻,最大封星制动转矩不变,但最大制动转矩对应的电机转速发生变化. 无论采用接触器封星还是采用传统电子封星的方法,都会存在中高速时封星转矩随速度增加而减小的问题.
在实际应用中,很难在电机回路中串入实际的可变电阻用于提升封星制动转矩. 寇天明[15]引入虚拟电阻控制策略对永磁同步电机的矢量控制性能进行改善,但虚拟电阻控制策略用于改善电梯电子封星制动转矩未见报道. 为了进一步保证电梯在失控时的安全、有效地制动,本文提出一种基于最优电阻的永磁同步曳引机电子封星制动转矩提升方法,根据当前电流幅值、母线电压和转速,动态改变PWM占空比从而改变虚拟电阻的大小,使永磁电机实际定子电阻与虚拟电阻的和为最优电阻值,在当前转速下能够产生最大制动转矩,以此来达到提高电子封星制动转矩的目的. 本文提出的方法在不改变原有硬件系统和不增加任何硬件成本的基础上,提高了电梯溜梯运行在中高速时的封星转矩.
1 接触器封星制动转矩解析模型
接触器封星原理图如图1所示,其中M代表永磁同步电机(permanent-magnet synchronous motor,PMSM,简称PM电机),U、V、W为PM电机的三相输入端子. 在变频器与 PM 电机之间增加封星接触器,实现短接电机三相输入[6]. 分析电梯封星时的制动力矩,需要借助永磁同步电机的数学模型. 为了简化分析,假设:三相绕组对称分布,各绕组轴线在空间上互差 120°;忽略定子铁心和转子铁心的涡流损耗和磁滞损耗;转子上的永磁体产生主磁场,转子没有阻尼绕组.
永磁同步电机电压方程为[16]:
式中:p 为微分算子;ud、uq 分别为直、交轴定子电压;id、iq 分别为直、交轴定子电流;Ld、Lq 分别为直、交轴电感;Rs 为定子电阻;ωe 为电子角速度;ψr 为转子磁链. 转矩方程为:
式中:np 为电机的极对数.
电梯接触器封星时,输入电压ud = uq = 0. 在轿厢与对重不平衡产生的力矩作用下,曳引机运动使得永磁体磁场切割三相电机绕组而产生电流,从而产生制动力. 当曳引机的制动转矩与系统不平衡力矩相等时,曳引机的转速维持恒定达到稳定运行状态,此时电流的变化率为0,即pid = piq = 0,此时式(1)变成:
将式(4)和式(5)代入式(2)可得电机转矩为:
从式(7)可知,当永磁电机三相短接时,输出转矩为制动转矩. 从式(4)、式(5)和式(7)可得,直、交轴电流id、iq 和转矩Te标幺值随电机运行频率f 标幺值变化的关系如图2所示.从图2中可以看出,系统存在一个最大的制动转矩,超过某一速度后,制动转矩和交轴电流iq 随速度升高而减小. 当速度较高时,封星时会出现比较大的直轴弱磁电流,可能会导致永磁体退磁,同时dq 轴电感可能变大,导致封星转矩进一步降低.
2 基于最优电阻的电子封星方案
在低速封星时,当轿厢不平衡力矩小于该最大转矩时,电梯可以通过封星实现匀速运行,反之会出现飞车现象. 在高速封星时,当高速封星制动力矩大于轿厢不平稳力矩时,速度变小,封星转矩变大,直至速度越过图2所示的拐点速度,在拐点速度左边对应的某一速度下稳定下来;当轿厢不平衡力矩大于高速封星时的制动转矩时,速度变大,制动力矩变得更小,从而导致飞车. 因此提高中高速时的封星转矩对电梯的安全至关重要.
将式(7)对Rs 进行求导,得到:
令dTe /dRs = 0,得到某一速度下制动转矩极值对应的电阻为:
由式(9)可知,当电机电感值确定时,制动转矩最大值所对应的电阻与电机运行频率成正比. 如图3所示,随着定子电阻的增大,最大封星制动转矩标幺值对应的电机运行频率标幺值在增大,这为提高中高速下的封星制动转矩提供了一种可行的方案. 值得注意的是,通常永磁同步曳引机电机功率密度设计较高,永磁电机参数通常为非线性,最优电阻与转速的关系并非是线性的,在实际应用中可采用标定的电感值用于式(9)的计算,即根据当前的dq 轴电流,通过查表的方式获取当前负载下的dq 轴电感.
使用接触器封星时,很难通过改变电机电阻值提升中高速封星时的制动转矩. 电子封星方案简图如图4所示,KM1为运行接触器;S1、S3、S5为三相桥式逆变器的上桥臂开关管;S2、S4、S6为三相桥式逆变器的下桥臂开关管;P、N分别代表母线的正、负极,Vdc为母线电压;O代表母线电压的中性点,母线上两个电容间电压相等.电子封星时上桥臂完全封锁,这样避免了能量从母线电容传递至电机侧,杜绝电动转矩的产生以满足电梯安全规范. 通过控制图4所示的变频器下桥臂的占空比,改变加在电机端的电压,实现变电阻电子封星,提高制动转矩.
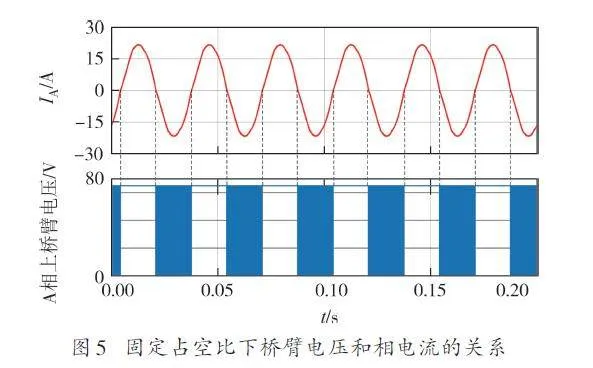
在给定电机运行频率为30 Hz和给定占空比为0.9的条件下,电子封星时桥臂电压和相电流的关系如图5所示. 由图5可知:
1)当电机相电流为正时,通过逆变器的下桥臂二极管续流,无论有无驱动信号,都等效为下桥臂导通状态.
2)当电机相电流为负时,如果下桥臂的开关管导通,则电机相电压为0;如果下桥臂的开关管关闭,则通过上桥臂二极管续流,电机相电压为直流电压.
从三相逆变器的视角总结为:当电机相电流为正时,逆变器等效为下桥臂导通状态;当电机相电流为负时,逆变器等效为正常工作状态. 假定A、B、C相电流分别为:
电压直流分量在电机三相系统中为零序电压,并不能产生电流. 交流分量中如果仅仅考虑基频电压分量,A、B、C相电压的表达式分别为:
式(18)的等效输入电阻可以理解为电机实际定子电阻与虚拟电阻的和. 根据式(9)得到制动转矩最大时对应的最优电阻可简化为:
由式(18)可知,改变PWM 占空比don 来改变定子电压基频分量的大小,便可以改变等效输入电阻Rsequ的大小. 若Rsequ和Rsopt相等,则可以实现当前转矩下的最大制动转矩,此时得到某一转速下制动转矩最大时对应的最优占空比don 为:
3 实验结果
3.1 实验平台介绍
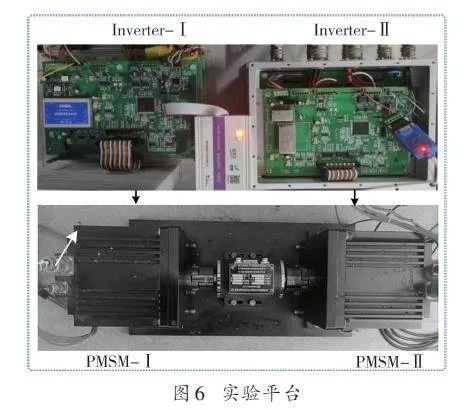
电子封星验证实验平台如图6所示,其中,驱动器Inverter-Ⅰ驱动PMSM-Ⅰ,驱动器Inverter-Ⅱ驱动PMSM-Ⅱ. 三相PMSM空载时的参数如表1所示.PMSM-Ⅰ运行在封星模式,如图4所示的三相H桥上桥臂封锁,而下桥臂进行PWM斩波控制,开关频率为10 kHz. PMSM-Ⅱ运行在恒转速模式,运行频率为0~50 Hz,用于模拟电梯失控时的失速运行. 实验过程中的DSP代码由Simulink自动生成,代码下载到DSP28335控制器,通过上位机串口通信与控制器交互信息.
3.2 传统电子封星方案的实验结果
对传统电子封星技术进行实验验证,直接将三相电机三相绕组短接,即逆变器上桥臂封锁,下桥臂占空比为100%,三相电机绕组通过驱动器下桥臂短接. 测试中电机运行频率在0~32 s的时间内由0 Hz缓慢升高到50 Hz,所测得的dq 轴电流和A相定子电流如图7所示. 由图7可知,随着转速的提高,d 轴电流幅值一直在增大,而q 轴电流在某个转折频率点后逐渐减小. 此时测得转矩、电流随频率变化的曲线如图8所示.由图8可知,当永磁电机三相短接时,输出转矩为制动转矩,且存在一个绝对值最大的转矩点,该绝对值最大点对应的频率大约为13 Hz,对应的电流幅值为22 A,实验结果与图2 所示的仿真结果一致.
3.3 基于最优电阻的电子封星方案验证
采用第2 节中基于最优电阻的电子封星制动PWM控制策略,具体实现方法如图9所示,测试中电机频率在0~32 s的时间内由0 Hz缓慢升高到50 Hz,所测得的dq 轴电流和A相定子电流分别如图10(a)和图10(b)所示. 从图10可以看出,当转速超过某一频率点后,dq 轴的电流几乎不变,d 轴电流约为17 A,q 轴电流约为14 A,相电流幅值约为22 A. 由此可以看出,本文提出的方法在全速度范围内,不会产生过大的电流冲击,因此不会对电梯的电力设备产生过大的影响,是一种安全的制动方式.
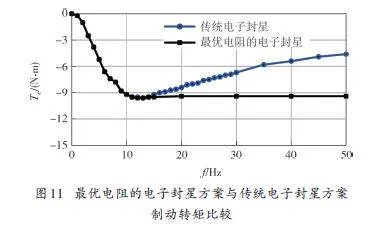
最优电阻的电子封星方案与传统电子封星方案制动转矩比较如图11所示. 由图11可知,电机频率小于13 Hz时,最优电阻的电子封星方案与传统电子封星方案产生的制动转矩一致,这是因为当电机频率在13 Hz以下时,根据式(19)计算的Rsoptlt;Rs,从而使得根据式(21)计算出来的占空比大于1,相当于所有下桥臂导通,此时PWM电子封星等效为传统的机械封星. 当电机频率大于13 Hz时,根据式(19)计算的Rsoptgt;Rs, 便可以通过改变下桥臂的占空比,使等效定子电阻值一直为最优定子电阻值来提高电子封星转矩,相较于图8所示的传统电子封星产生的制动转矩.本文所提出的最优电阻电子封星方案在中高速段有明显的转矩提升,从而实现了在中高速提升封星转矩的设计目的.
4 结 论
本文以电梯用永磁同步曳引机电子封星作为研究对象,提出了一种基于最优电阻的永磁同步曳引机电子封星制动转矩提升方法. 该方法不需要单独的机械封星接触器,通过原有系统的变频器即可实现电气制动,大大节省了成本和空间. 相较于传统的接触器封星和电子封星技术,可有效提升中高速封星制动转矩,达到提升电梯运行安全的目的. 该封星方法在中高速保持较高制动转矩的同时,直轴和交轴电流不会随着转速的升高而增大,可以有效避免高速封星时产生过电流,同时可以避免产生过大的弱磁电流使永磁体失磁.
参考文献
[1] 张晓峰, 王士琴. 封星技术在电梯驱动主机中应用的技术要点[J]. 中国电梯, 2022, 33(23):60-63.
ZHANG X F,WANG S Q. Key points of application of starsealingtechnology to elevator machine[J].China Elevator,2022,33(23): 60-63.(in Chinese)
[2] JUN L,MIN L. Development of elevator intelligent safety controlsystem based on PLC[C]//2013 International Conference onComputational and Information Sciences, June 21-23,2013.Shiyang,China:IEEE,2013:1963-1966.
[3] 刘广震,张勇,焦青山.电梯加装“电机封星” 功能的必要性分析[J].中国特种设备安全,2023,39(4):64-66.
LIU G Z,ZHANG Y,JIAO Q S. Analysis on the necessity ofadding “star sealing of motor” function in elevator[J]. ChinaSpecial Equipment Safety,2023,39(4):64-66.(in Chinese)
[4] 刘键.封星技术及其在永磁同步曳引机上的应用[J].黑龙江科学,2016,7(17): 26-27.
LIU J. Star sealing technology and application on permanentmagnet synchronous traction machine[J].Heilongjiang Science,2016,7(17):26-27.(in Chinese)
[5] 赵曹慧,张新宇,井怿斌.封星技术在永磁同步曳引机上的应用分析[J].中国设备工程,2018(12):177-178.
ZHAO C H,ZHANG X Y,JING Y B.Application analysis of starsealing technology in permanent magnet synchronous tractionmachine[J]. China Plant Engineering,2018(12):177-178.(inChinese)
[6] 王磊.应对永磁同步驱动电梯轿厢意外移动时制动器失效的控制系统[J]. 中国电梯,2023,34(3):24-26.
WANG L. Control system to deal with brake failure whenpermanent magnet synchronous drive elevator car movesaccidentally[J]. China Elevator,2023,34(3):24-26.(inChinese)
[7] 刘文.基于变频器STO功能的电子封星功能[J].今日制造与升级, 2021(5): 28-29.
LIU W. Electronic star sealing function based on STO functionof frequency converter[J]. Manufacture amp; Upgrading Today,2021(5): 28-29.(in Chinese)
[8] 王翊仲, 欧其斌, 黄凯东. 电梯曳引机封星控制方法:CN108483149A[P]. 2018-09-04.
WANG Y Z, OU Q B, HUANG K D. Elevator traction machinestar sealing control method: CN108483149A [P]. 2018-09-04.(in Chinese)
[9] 冯云. 永磁同步型电梯驱动主机封星安全保护技术研究[D].西安: 西安建筑科技大学, 2019.
FENG Y. Research on the safety protection technology ofpermanent magnet synchronous elevator driving main engine forstar sealing[D]. Xi’an:Xi’an University of Architecture andTechnology,2019.(in Chinese)
[10] 罗旋旋,邓丽梅,胡益,等.浅谈封星接触器在同步曳引式电梯中的应用[J].中国电梯,2023,34(6): 32-33.
LUO X X,DENG L M,HU Y,et al. Application of star-sealingcontactor in synchronous traction elevator[J]. China Elevator,2023,34(6):32-33.(in Chinese)
[11] 郭威, 郭志海, 魏明栋. 电梯安全保护控制方法、装置及系统:CN108382934A[P]. 2018-08-10.
GUO W, GUO Z H, WEI M D. Elevator safety protection controlmethod, device and system: CN108382934A [P]. 2018-08-10.(in Chinese)
[12] 李辉, 蒋鹏, 向学位, 等. 一种提升电梯永磁同步曳引机封星转矩方法:CN115072531A[P]. 2022-09-20.
LI H, JIANG P, XIANG X W, et al. A method for improving thesealing torque of elevator permanent magnet synchronous tractionmachine: CN115072531A[ P]. 2022-09-20(. in Chinese)
[13] 何栋林,周小筠.电梯永磁同步曳引机参数对封星制动力矩的影响[J].中国电梯,2022,33(20):20-23.
HE D L, ZHOU X J. Influence of elevator permanent magnetsynchronous tractor parameters on sealing braking torque[J].China Elevator,2022,33(20):20-23.(in Chinese)
[14] 梁丙雪,王大志,徐广人,等.无齿轮永磁同步曳引机封星速度研究[J].中国电梯,2018,29(17):7-10.
LIANG B X, WANG D Z, XU G R, et al. Study on speed of highspeed short-circuit of motor rotor of permanent magnetsynchronous gearless machine of elevator[J]. China Elevator,2018,29(17):7-10.(in Chinese)
[15] 寇天明. 引入虚拟电阻的永磁同步电机电流环控制策略研究[D]. 西安: 西安理工大学, 2019.
KOU T M. Research on current loop control strategy of permanentmagnet synchronous motor with virtual resistance[D]. Xi’an:Xi’an University of Technology, 2019.(in Chinese)
[16] 刘晓黎.基于永磁同步电机数学模型的矢量控制理论、仿真、实验及应用研究[D].合肥: 合肥工业大学,2017.
LIU X L. Research on vector control theory, simulation,experiment and application based on mathematical model ofpermanent magnet synchronous motor[D]. Hefei:Hefei Universityof Technology,2017.(in Chinese)
基金项目:湖南省自然科学基金资助项目(2023JJ30133),Natural Science Foundation of Hunan Province(2023JJ30133)
猜你喜欢
中国品牌(2019年10期)2019-10-15 05:57:12
小学生学习指导(低年级)(2018年3期)2018-01-31 02:18:58
中国医学创新(2017年2期)2017-02-23 14:25:44
中国科技博览(2016年25期)2016-12-20 18:03:20
中国科技博览(2016年26期)2016-10-24 17:29:26
中国科技博览(2016年19期)2016-10-19 10:39:26
科技视界(2016年17期)2016-07-15 08:47:42
小学生时代·综合版(2016年7期)2016-05-14 17:53:49
科技资讯(2015年33期)2016-05-12 22:04:42
红蜻蜓·低年级(2015年11期)2016-02-02 10:54:54