LCL 并网逆变器有源阻尼预测无差拍平均模型控制
2025-03-07 00:00:00朱颖达陈常曦欧阳红林肖牧轩
湖南大学学报·自然科学版 2025年2期













摘要:为解决LCL并网逆变器固有的谐振问题,提出优化的电流控制方法和有源阻尼方法;为减小数字控制系统延时对电流控制和有源阻尼的影响,提出无差拍平均模型和复合型延时消除方法. 由于控制模型是电流控制和延时补偿的基础,通过引入过采样方法并融合信号处理技术,建立逆变器侧电流反馈控制的无差拍平均模型,将传统单样本瞬时控制转化为多样本平均控制,改善控制模型的准确性. 基于所建模型,通过引入结合双重脉冲宽度调制(pulse width modulation, PWM)更新的预测控制,提出预测无差拍平均模型控制方法,提供精确的延时补偿,提高系统的稳定性和鲁棒性. 在预测无差拍平均模型控制的基础上,提出平均电容电压前馈法,消除数字延时对有源阻尼的影响,进一步加强弱电网条件下系统的鲁棒性,通过实验验证了本文方法的有效性.
关键词:数字控制系统;功率变换器;控制系统分析;有源阻尼
中图分类号:TM464 文献标志码:A
LCL 并网逆变器作为分布式电源和电网的接口,广泛应用于新能源并网[1-2]、微电网[3-4]和储能系统[5-6]等领域. 相较于L型滤波器,LCL滤波器具有谐波性能好、功率密度高和成本低等优点,但同时也会引入谐振问题[7]. 数字系统延时以及不合理的参数配置引起系统谐振,大大降低了系统的稳定性[8-9].对于LCL谐振问题,解决方法通常是加入额外的阻尼环节,包括无源阻尼和有源阻尼. 其中,无源阻尼直接在LCL滤波器中加入一组物理电阻以提高系统阻尼,这种方法简单可靠[10-11],但会增加功率损耗,不利于系统的效率和功率密度. 没有功率损耗的有源阻尼则更受欢迎,但通过软件实现的有源阻尼不可避免地受到数字系统延时的影响[12-17],根据电路(连续系统)标称参数设计的有源阻尼特性将会退化甚至消失. 数字系统延时不仅会影响并网逆变器电流控制系统的稳定性,而且会引起有源阻尼效果减弱.
研究表明[8-9],在逆变器侧电流反馈(invertersidecurrent feedback, ICF)控制下,降低系统延时有利于数字系统的稳定性. 在并网逆变器中,系统延时的典型值为1.5Ts(Ts为开关周期),包括控制延时和PWM延时[13-15]. 消除延时影响的方法分为延时降低法和延时补偿法[18-19]. 其中,延时降低法能提供的延时降低有限(不超过一个控制周期),常见方法有采样点移动法[8]和多重PWM更新法[20-21];延时补偿法主要基于预测控制[12],常见方法有线性预测[22]和无差拍控制[23],为保证预测的准确性,预测控制需要准确的控制模型,并通常提供等于控制系统时间单元整数倍的延时补偿. 因此,延时降低法和延时补偿法均无法独立地消除系统延时影响.
准确的控制模型是预测控制实现延时补偿的基础[22]. 本文建立的无差拍平均模型通过引入过采样和信号处理方法提高了控制模型的准确性. 众所周知,数字控制模型是基于样本建立的,在实际应用中由传感器硬件决定的采样频率比控制频率高得多,基于过采样方法可以获得更多离散样本,有利于数字控制模型的准确性[20]. Zhang等[21]提出的基于过采样的控制方法属于多重PWM更新法,该方法基于传统控制模型,每次采样需要完成一次完整的控制策略,然而高采样率将占用控制器大量的计算资源,且消除延时影响的效果有限. 传统控制模型不具备在一个控制周期内处理多样本的能力,而无差拍平均模型控制在建模过程中引入信号处理方法,利用空间矢量脉冲宽度调制(space vector PWM, SVPWM)中双边沿调制的对称性,将多样本融入控制模型,准确地描述系统在一个控制周期内的平均状态. 此外,考虑到延时降低法和延时补偿法均无法独立地消除系统延时的影响,本文采用的预测无差拍平均模型控制引入结合双重PWM方法的预测控制. 基于无差拍平均模型的预测控制可以提供等于开关周期的延时补偿;由于双重PWM 方法的引入,控制延时和PWM延时均可视为等于0.5Ts的纯时间延时环节. 因此,预测无差拍平均模型控制可以同时补偿控制延时和PWM 延时,将系统延时对ICF 控制的影响最小化.
然 而,在弱电网条件下还存在电网阻抗波动问题[24-25]. 当网侧阻抗较低时,预测无差拍平均模型控制仍面临谐振风险. 为了进一步提高系统的稳定性,加入了基于电容电压前馈的有源阻尼法. 有源阻尼法根据不同的技术路径可分为虚拟阻抗法和谐振频率消除法. 其中,常见虚拟阻抗法有电容电流前馈法,其通过电容电流反馈构建等效虚拟阻抗以抑制谐振[12-13],需要额外的高性能电流传感器,且由数字延时引起的虚拟阻抗特性变化将降低有源阻尼效果. 谐振频率消除法从传递函数的角度切入,通过消除控制系统中的谐振峰以抑制谐振,常见谐振频率消除法有陷波器法[14-15]和电容电压前馈法[16-17]. 陷波器法对系统阻抗变化敏感,不适用于弱电网条件;相比之下,电容电压前馈法具备更好的鲁棒性. 传统电容电压前馈法受系统延时影响,谐振消除效果不理想[26].平均电容电压前馈法基于预测无差拍平均模型控制,将延时补偿后的平均系统状态用于谐振消除,可达到预期有源阻尼效果.
本文提出一种适用于LCL型并网逆变器的有源阻尼预测无差拍平均模型控制方法. 针对并网逆变器ICF控制,采用过采样方法并融合信号处理技术,建立了一种物理意义明确的无差拍平均模型.将传统单样本瞬时控制转化为多样本平均控制.在所建控制模型的基础上,通过引入结合双重PWM更新的预测控制,提出预测无差拍平均模型(predictivedead-beat average model, PDBAM)控制方法,提供了精确的延时补偿,将数字系统延时对电流环的影响最小化,提高了系统的稳定性和鲁棒性.基于预测无差拍平均模型控制,提出一种基于平均电容电压前馈的有源阻尼方法,有效地克服了数字系统延时对有源阻尼的影响,加强了系统的鲁棒性. 最后,通过实验验证了所提方法的有效性.
1 预测无差拍平均模型及其控制
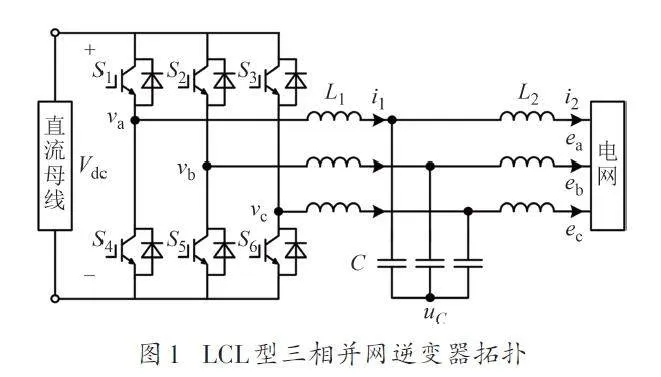
图1为LCL型三相并网逆变器拓扑,包括直流母线、三相桥式逆变器及其开关器件(S1~S6)、逆变器侧电感L1、滤波电容C、网侧电感L2和电网,其中uC为逆变器侧电容电压. 考虑最坏工况,滤波器中的寄生电阻被忽略. 在实际应用中,并网逆变器通过变压器接入电网,直接测量实际电网电压是困难的,因此可将电容电压视为公共耦合点电压. 通常,并网逆变器采用单电流环实现功率控制,本文采用ICF 电流控制.
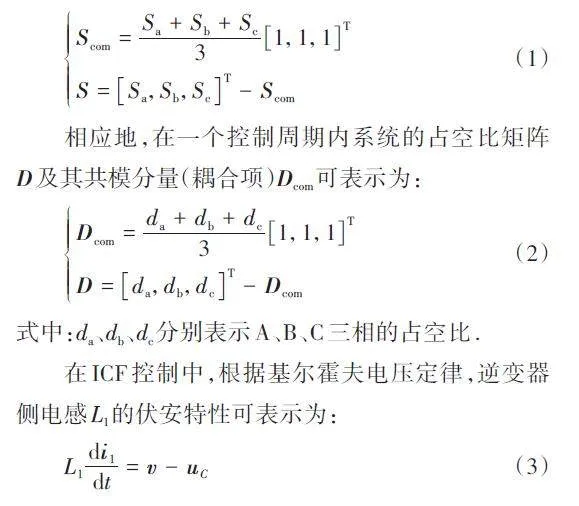
三相逆变器中,为了避免桥臂直通导致系统短路,同一桥臂上的两个开关器件互补导通. 因此,系统开关状态可以通过上桥臂开关器件的状态描述:当S1/S2/S3导通时,开关状态Sa/Sb/Sc为1;当S1/S2/S3关断时,开关状态Sa/Sb/Sc为0. 系统的开关状态矩阵S 及其共模分量(耦合项)Scom可表示为:
式中:i1、uC和v 分别为系统的逆变器侧电流矩阵、电容电压矩阵和逆变器电压矩阵,可分别表示为i1 =[i1a,i1b,i1c ]T,uC = [uCa,uCb,uCc ]T,v = [ va,vb,vc ]T,逆变器电压v 通常无法直接测量,可通过直流母线电压Vdc和系统占空比D 重构得到,v = Vdc ⋅ D.
1.1 无差拍平均模型
传统控制模型基于电感的伏安特性,通常采用规则采样以避免采样混叠. 考虑到三相并网逆变器控制策略占用大量计算资源,包括锁相环、坐标变换、控制算法和SVPWM,控制频率无法比开关频率高很多,通常设置为开关频率. 由式(3)可得传统控制模型[27-28]:
式中:(k)代表k 周期的系统状态.
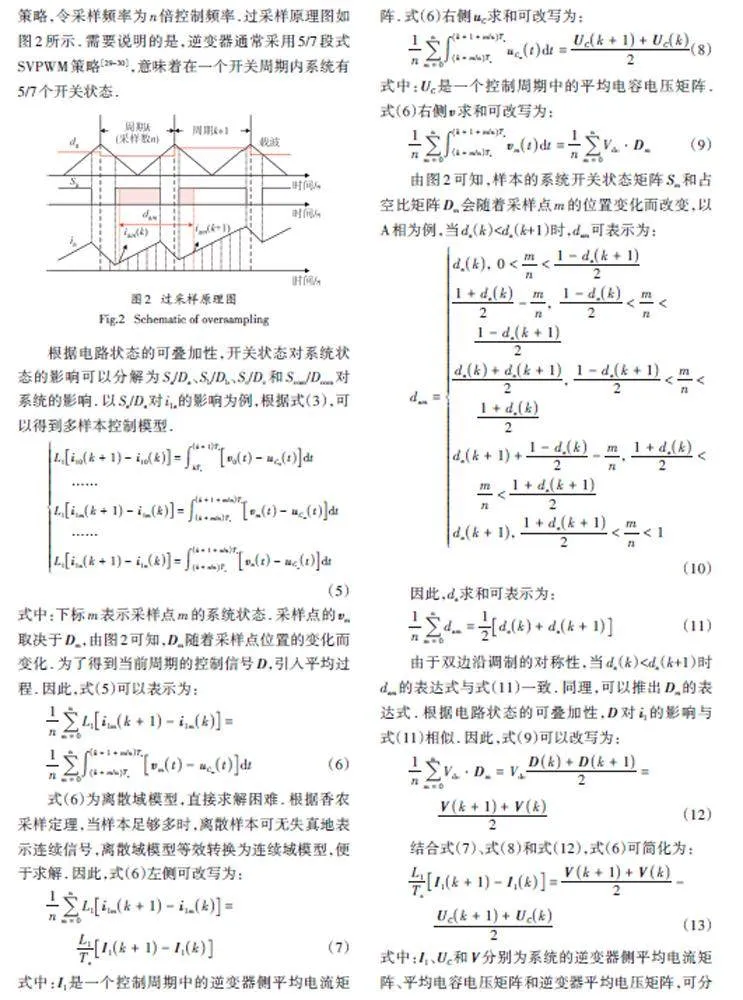
数字系统是典型的离散系统,构建离散控制模型的基础是离散样本,更多的有效样本能使离散控制模型更接近连续实际模型. 相较于基于规则采样的传统控制模型,无差拍平均模型采用过采样方法,在一个控制周期内增加更多离散样本,同时引入信号处理方法,将多样本融入控制模型中. 考虑到三相并网逆变器通常采用恒定频率的双边沿PWM调制策略,令采样频率为n 倍控制频率.过采样原理图如图2所示. 需要说明的是,逆变器通常采用5/7段式SVPWM策略[29-30],意味着在一个开关周期内系统有5/7个开关状态.
式中:I1、UC和V 分别为系统的逆变器侧平均电流矩阵、平均电容电压矩阵和逆变器平均电压矩阵,可分别表示为I1 = [ I1a,I1b,I1c ]T,UC = [UCa,UCb,UCc ]T 和V = [Va,Vb,Vc ]T.
式(13)是平均电流矩阵的差分方程,等式右侧为相邻周期的平均电压状态. 因此,式(13)可定义为无差拍平均模型.
注意到式(4)中的传统控制模型和式(13)中的无差拍平均模型在数学表达上有一定的相似之处,因为两种控制模型都源于电感的伏安特性. 此外,无差拍平均模型巧妙地将传统的单点瞬时控制转化为多点平均控制,其简洁的模型表达式得益于双边沿调制的对称性和电路状态的可叠加性. 在无系统噪声和有系统噪声环境下,传统控制模型和无差拍平均模型中逆变器侧电流如图3所示.
在并网逆变器中,实际电流波形由主要的正弦波分量和次要的三角波分量组成,如图3(a)所示. 因此,传统控制模型中单点采样得到的i1a只代表开关周期起始点A相的瞬时电流,而无差拍平均模型通过多样本得到的I1a是一个控制周期内A相的平均电流. 从图3(a)中可以看出,i1a 和I1a 之间的差异很明显,并且该差异与正弦电流的变化率正相关,最大差异出现在正弦电流过零时. 由于i1a和I1a之间差异的变化,在传统控制模型中通过单点采样几乎无法获得具有明确物理意义的瞬时电流,例如平均/峰值/谷值电流.
系统功率密度的提高会引起大量系统噪声,影响电流控制效果,传统控制方法通常将控制设计与噪声抑制分步进行,在基于控制模型的控制设计完成后通过引入信号处理方法实现噪声抑制[31-32],以改良控制性能. 然而,额外的滤波环节会改变系统响应,进一步对数字系统的模型与控制产生影响. 由于在控制设计时传统控制模型不包含信号处理过程,控制系统对噪声敏感,噪声将引起控制性能恶化. 因此,本文在建模时通过引入过采样增加了离散样本,并融合信号处理方法,巧妙地将传统的单点采样控制模型转化为多点平均控制模型,从控制模型层面改善了电流控制的抗干扰性能和稳态性能.从图3(b)可知,在噪声环境下,所建立的模型被控对象I1a的波动明显小于传统模型被控对象i1a,所建立的模型受噪声影响较小,I1a仍能较好地描述实际电流的平均状态. 因此,所建立的无差拍平均模型中的多点平均控制方法比传统控制模型中的单点瞬时控制具有更好的抗干扰能力.
与传统模型相比,所建控制模型具有明确的物理意义,可以准确地描述系统平均状态,从控制模型层面提高了系统的抗干扰能力,并有利于进一步的时间补偿.
1.2 预测无差拍平均模型控制
数字控制下系统延时是不可避免的,包括控制延时td1 和PWM 延时td2. 令开关周期为Ts,等于控制周期的控制延时将使在k 周期中获得的控制信号D(k)在k+1周期而不是k 周期更新. 由零阶保持效应引起的PWM延时导致控制信号在0.5Ts 后生效. 在数字系统中,未考虑系统延时的传统电流控制算法时序图如图4所示.
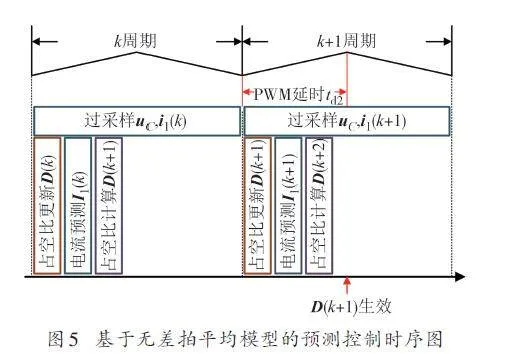
本文提出了一种预测无差拍平均模型控制,通过引入结合延时降低法的延时补偿法将系统延时对控制的影响最小化. 首先,基于无差拍平均模型引入预测控制建立延时补偿框架,使占空比D(k+1)可以在k 周期内得到,如图5所示.
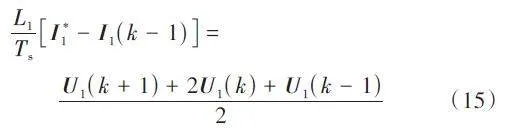
根据图5,过采样在整个控制周期中持续,I1(k)将在k+1 周期而不是k 周期中获得,因此,需对式(13)中的I1(k)进行预测,根据迭代算法可得:
式中:U1=V-UC. 需要说明的是,在迭代算法中D(k-1)和D(k)在k-1周期内已经获得,因此在预测算法中,U1 (k-1)和U1 (k)均为已知量.
结合式(13)和式(14),可得预测无差拍平均模型的控制为:
式中:上标*代表给定参考值. 式(15)中的预测控制可以提供等于Ts的延时补偿. 此时,由于控制周期等于开关周期,等于控制周期Ts的控制延时td1可以被预测控制补偿,但是等于0.5Ts的PWM延时td2仍有待补偿,如图5所示. 此外,当等于控制周期的数字系统的时间单元为Ts时,数字系统时间单元的精度不足以分析值为0.5Ts 的PWM延时. 这也是传统控制模型需要对PWM延时进行等效处理的原因,但等效处理的引入不便于延时补偿.
本文将PWM延时视为纯时间延时项,以提高离散模型的准确性,便于时间补偿. 这要求td2是控制周期的整数倍,同时假设td1和td2均能够被式(15)中的预测控制补偿,即
当控制周期等于0.5Ts时,可以满足式(16)中的约束条件. 此时,控制延时和PWM延时都可以通过z变换轻松转换为纯时间延时项.
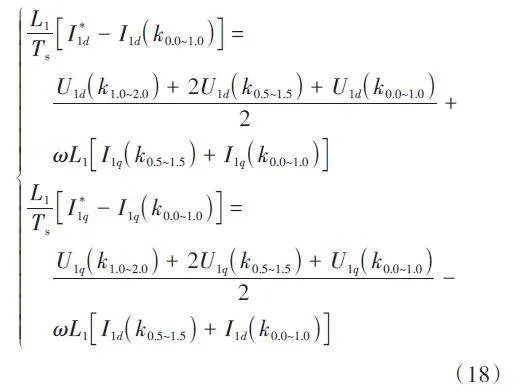
采用双更新PWM 方法,控制周期可减半至0.5Ts,一个开关周期可分为两部分. 根据式(15),预测无差拍平均模型控制可表示为:
式中:(k0.0~1.0)表示变量在开关周期k 的前半周期和后半周期的值;(k0.5~1.5)表示变量在开关周期k 的后半周期和k+1的前半周期的值;(k1.0~2.0)表示变量在开关周期k+1的前半周期和后半周期的值;(k1.5~2.0)表示变量在开关周期k+1的后半周期的值.
在SVPWM 策略的dq 坐标下,预测无差拍平均模型控制可表示为:
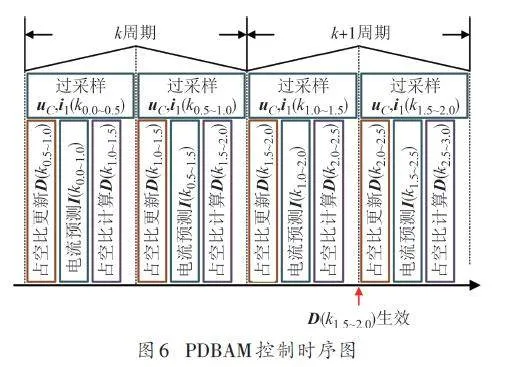
所提控制方法在预测控制的基础上结合双重PWM,可以精准地补偿数字系统中的控制延时和PWM延时,其控制时序图如图6所示.
需要说明的是,双重PWM方法的引入将略微破坏基于双边沿调制的无差拍平均模型的对称性,导致一些非线性,可以通过在控制器中加入适当积分环节解决.
1.3 控制系统分析
本节对预测无差拍平均模型控制下系统的控制性能进行分析. 预测无差拍平均模型控制框图如图7所示.
图7中,E 为平均电网电压矢量矩阵,D1为控制器传递函数,Gd为延时环节传递函数,D2代表控制模型中的平均过程,H 为反馈系数,GL1、GC、GL2分别代表L1、C、L2的传递函数. GLCL表示LCL逆变器ICF控制的开环传递函数,在连续域内GLCL可以表示为[8-9]:
在预测无差拍平均模型控制下,ICF电流环的控制框图如图9所示. 在图9中,GL1是无差拍平均模型中逆变器侧电感的传递函数. 根据式(13),传递函数D2(z)GL1(z)可表示为:
由图6可知,在当前控制周期中过采样持续进行,过采样结果将在下一个控制周期时得到. 因此,反馈路径中包含单位时间延迟z-1,电流反馈通道的传递函数H(z)可以表示为:
H (z ) = z-1 (30)
因此,可得到ICF控制环的闭环传递函数Φ(z):
Φ (z ) = D1( z)Gd( z) D2( z)GL1( z)/1 + H ( z) D1( z)Gd( z) D2( z)GL1( z) = z-1(31)
由式(31)可知,所提控制方法理论上可达到无差拍控制效果,符合无差拍控制原理.
2 优化的有源阻尼方案
在弱电网条件下,系统存在网侧阻抗波动问题.当网侧阻抗较低时,LCL谐振频率升高,由式(28)可知,系统在预测无差拍平均模型控制下仍存在谐振风险. 本文将引入基于电容电压前馈的有源阻尼法,旨在进一步提高系统的稳定性和鲁棒性.
2.1 传统有源阻尼法
传统有源阻尼法在实际应用中存在一定的局限性. 有源阻尼法按不同的技术路径可以分为虚拟阻抗法和谐振频率消除法,传统有源阻尼法基于传统控制模型,常见的方法有电容电流反馈法、陷波器法和电容电压前馈法.
虚拟阻抗法源于无源阻尼法.无源阻尼法通过在LCL滤波器中加入电阻器件来抑制谐振,但是电阻器件的加入会增加功率损耗,降低系统效率. 因此,学者们通过系统状态变量构建等效虚拟阻抗以抑制LCL谐振. 研究表明[33],基于电容电流反馈实现的、与电容并联的虚拟阻抗易于实现,且谐波性能良好.电容电流反馈法中电流控制如图10所示,图10(a)中Di为数字电流控制的传递函数.
为了实现图10(b)中的虚拟电阻RAD,电容电流反馈系数HAD应满足:
HAD = L1/CRADGd(32)
理想情况下,虚拟阻抗表现为纯阻性,电容电流反馈法可以在不增加功率损耗的情况下,获得等效于无源阻尼的阻尼特性. 电容电流反馈法受系统延时Gd影响,所获得的虚拟阻抗ZAD为:
ZAD = RA/Dcos(-1.5ωTs ) + jsin(-1.5ωTs ) =RAD //jXAD (33)
式中:ω 为电网角频率;XAD为虚拟电抗,传统模型中系统延时典型值为1.5Ts. 根据式(33),在系统延时的影响下,基于电容电流反馈的虚拟阻抗失去纯阻性,如图10(c)所示. 这等效于改变系统参数,影响滤波器的谐波性能. 因此,系统延时会导致电容电流反馈法的有源阻尼特性恶化.
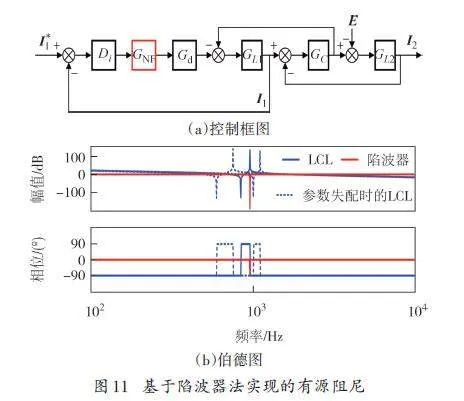
谐振频率消除法通过传递函数零极点配置以消除控制系统中的谐振峰,常见方法有陷波器法和电容电压前馈法. 其中,陷波器法不适用于弱电网条件,其控制框图和伯德图如图11所示.
陷波器法通常根据电路标称参数设计,由图11可知,陷波器在标称参数下针对LCL谐振峰有较强的抑制效果. 然而,面对弱电网条件下的电网阻抗变化,陷波器存在失效风险.
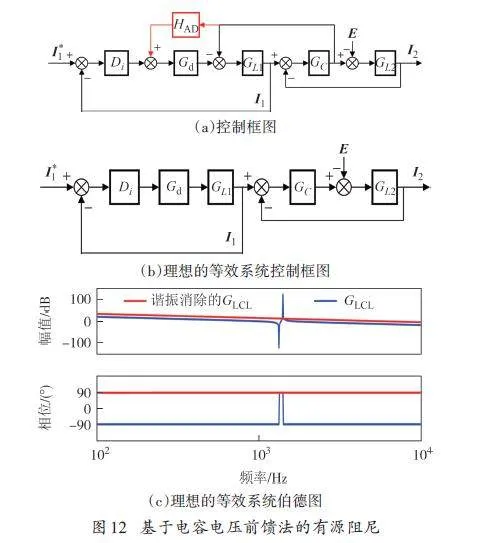
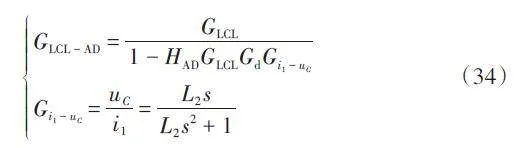
基于电容电压前馈法的有源阻尼具有更好的鲁棒性,其控制框图如图12(a)所示,引入电压前馈环后ICF环传递函数GLCL-AD可表示为:
式中:Gi1 - uC 为逆变器侧电流-电容电压的传递函数.
当未采用电容电压前馈时,ICF环传递函数GLCL如式(19)所示,系统包含两个在虚轴上的谐振极点,是导致系统谐振与稳定性恶化的主要原因. 通过引入电容电压前馈,可对系统进行零极点配置以消除谐振极点,如式(34)所示.
为实现谐振峰消除,相应的前馈增益HAD应满足:
HAD = 1 /Gd = 1/cos(-1.5ωTs ) + jsin(-1.5ωTs )(35)
此时,理想的等效系统控制框图和伯德图分别如图12(b)和图12(c)所示,ICF 环传递函数GLCL-AD变为:
GLCL - AD = L2C ⋅ s2 + 1/L1 s (L2C ⋅ s2 + 1) + (1 - HADGd ) L2 s = 1/ L1 s(36)
由图12(b)可知,电容电压前馈法在理想情况下可将三阶系统解耦为一个一阶系统和一个二阶系统,此时ICF电流控制由三阶降至一阶,如式(36)所示,理论上系统将不存在LCL 谐振问题. 但是,由式(35)可知,电容电压前馈受到系统延时的影响,前馈增益是时变的,在实际系统中难以实现.
因此,在常见的传统有源阻尼法中,电容电流反馈法不仅受数字系统延时的影响,而且需要额外的高性能电流传感器,导致其有源阻尼效果和经济性较差;陷波器法不适用于电网阻抗变化的弱电网条件;相比于陷波器法,电容电压前馈法鲁棒性较强,但仍受数字延时的影响.
2.2 优化的平均电容电压前馈法
本文提出一种基于预测无差拍平均模型控制的平均电容电压前馈法,旨在消除系统延时对电容电压前馈法的影响,提高预测无差拍平均模型控制的谐振抑制能力.
根据式(35),受系统延时影响,时变的前馈增益HAD是导致传统电容电压前馈法有源阻尼特性恶化的重要原因. 基于预测无差拍平均模型控制,所提阻尼方法中前馈增益HAD可表示为:
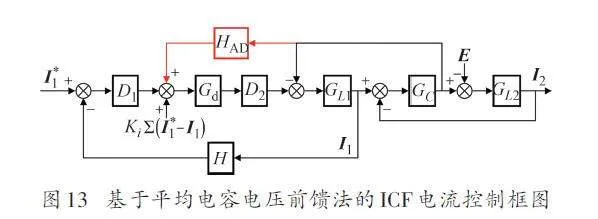
HAD(z) = 1/ Gd D2 = 2z2/1 + z-1 (37)
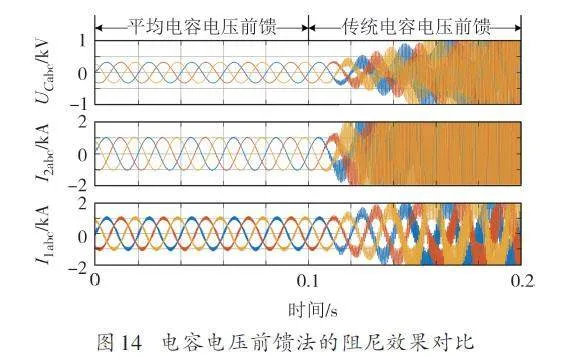
基于平均电容电压前馈法的ICF电流控制框图如图13所示. 在平均电容电压前馈法中,无差拍平均模型可以准确地描述一个控制周期内系统的平均状态且不包含纹波,是实现平均电容电压前馈法的坚实基础.相较于传统电容电压前馈法,预测无差拍平均模型控制对平均电容电压的预测易于实现,能为电容电压前馈提供精确的延时补偿,有效地消除了系统延时对有源阻尼的影响,具有参数配置简单、实用性强的特点. 电容电压前馈法的阻尼效果对比如图14所示.
由图14可知,传统电容电压前馈的阻尼效果不理想,系统仍存在谐振问题,而平均电容电压前馈法可有效实现谐波抑制,使系统能够稳定运行. 此时,平均电容电压前馈法可以获得如图12(c)所示的谐波消除效果.
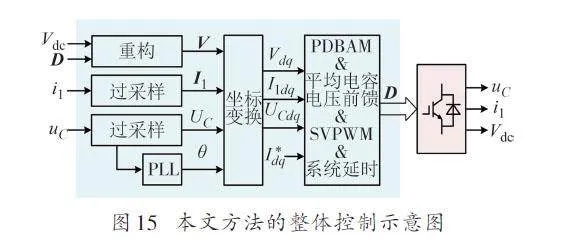
综上所述,针对LCL型并网逆变器,本文所提控制和阻尼方法的整体控制示意图如图15 所示. 其中,控制器采用带平均电容电压前馈的预测无差拍平均模型控制. 当系统处于式(28)中的稳定域时,仅通过预测无差拍平均模型控制可实现系统稳定运行;当系统处于式(28)的稳定域外时,平均电容电压前馈生效,以维持系统稳定性.
3 实验结果与分析
本文在500 kW逆变器样机上验证了本文方法的有效性,实验样机如图16所示,包括控制器、三相逆变器、LC滤波器、可变电感和并网变压器,其中网侧电感由可变电感和变压器的漏电感组成.
在实验样机中,选择IGBT作为功率开关器件;采用DSP(TMS320F28335)作为CPU;采用霍尔效应电流探头(ES1000C),其最大带宽为100 kHz,远大于电流信号频谱中有效正弦波分量的最高频率. 系统采样是通过直接存储器访问(DMA)结合DSP内置的模数转换器(ADC)实现的,不需要CPU控制传输,可以显著提高CPU的利用率,并支持过采样方法,将系统采样频率设置为开关频率的30倍.
3.1 稳态性能测试
为了验证预测无差拍平均模型控制的稳态性能,将其与传统PI控制和文献[8]中基于采样点移动的PI控制进行比较. 其中,PI控制参数根据对称优化方法配置[34]:KP=(L1+L2)·(3Ts)-1,KI=9Ts;文献[8]中通过采样点移动降低电流环延时,为了避免开关噪声和采样混叠,在实验中将采样点移动至开关周期中点位置. 实验结果如图17所示.
在图17(a)中,长达5 s的系统稳定运行波形证明了并网逆变器在预测无差拍平均模型控制下的稳定性;由图17(b)可知,当切换至PI控制,系统出现LCL谐振问题;由图17(c)可知,采样点移动的引入不足以抑制谐振;若需要在PI控制下确保系统稳定,则需要引入额外的阻尼环节. 因此,预测无差拍平均模型控制可以通过准确的时间补偿,降低系统延时对ICF控制的影响,有效克服LCL谐振问题,增强系统稳定性.
3.2 动态性能测试
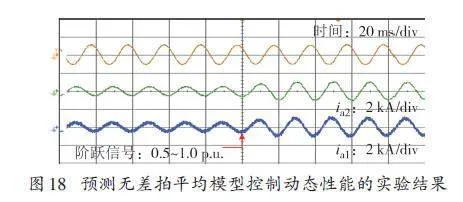
预测无差拍平均模型控制动态性能的实验结果如图18所示. 在0.1 s时,电流环阶跃信号为0.5~1.0 p.u..由图18可知,在阶跃响应过程中系统输出电压保持稳定,输出电流可以快速、平稳地跟踪参考信号,且不存在超调和振荡;系统在动态过程中保持稳定,未出现谐振问题. 因此,实验结果验证了预测无差拍平均模型控制具有良好的动态性能,且在动态过程中仍能有效地抑制LCL谐振.
3.3 鲁棒性测试
逆变器通过并网变压器连接到电网,而变压器漏感和线路阻抗取决于电网状态. 弱电网条件下存在电网阻抗波动问题,系统存在参数失配风险. 令匹配系数为KL,实际网侧电感可表示为L'2 = KL L2. 因此,式(28)可改写为:
根据表1中给出的系统额定参数,预测无差拍平均模型控制下系统的稳定区间可表示为:
KL gt; 0.892 (39)
由式(39)可知,实际网侧电感的最小值应大于标称值的0.892倍以保证系统稳定性.
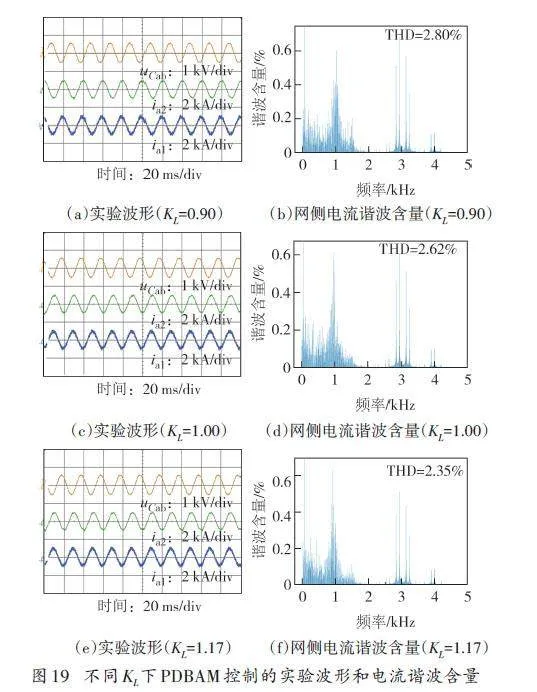
为了验证预测无差拍平均模型控制的鲁棒性以及式(39)中稳定域的有效性,在实验中通过调节可变电感模拟电网阻抗波动. 图19 展示了KL 分别为0.90、1.00、1.17时的实验波形和网侧电流谐波含量,此时对应的实际网侧电感和LCL 谐振频率分别为27 μH和996 Hz、30 μH和956 Hz、35 μH和902 Hz.
由图19(a)(c)(e)可知,在式(39)中的电网阻抗波动范围内,逆变器的输出保持稳定. 由图19(b)(d)(f)可知,在不同网侧电感下逆变器输出电流I2的谐波分量可分为两部分,一部分与LCL谐振峰有关,另一部分与开关频率(3 kHz)有关. 网侧电感变化会改变LCL滤波参数,直接影响与LCL谐振峰相关的谐波分布;同时,较大的网侧电感能提供更优的总谐波失真(total harmonic distortion, THD)效果. 因此,实验结果验证了预测无差拍平均模型控制的鲁棒性以及在式(28)和式(39)中所推导稳定区间的有效性.
3.4 有源阻尼测试
由式(39)可知,当网侧电感进一步降低时,在预测无差拍平均模型控制下系统仍然面临LCL谐振风险. 根据式(27)和式(28),当fresgt;0.5fs时,系统的相位裕度小于0,系统不再满足稳定性判据,此时平均电容电压前馈法生效以维持系统稳定. 为了验证所提平均电容电压前馈法的有效性,设计LCL 谐振频率为:
fres = 1 524 Hz gt; 0.5fs (40)
根据表1,相应的网侧电感为10 μH. 图20展示了L′2=10 μH时预测无差拍平均模型控制的实验结果. 此时,匹配系数KL=0.33,系统处于式(39)中的稳定域外. 由图20(a)可知,系统在预测无差拍平均模型控制下出现谐振问题,系统不稳定;在引入基于所提平均电容电压前馈的有源阻尼时,系统能稳定工作.由图20(b)可知,随着网侧电感的降低,系统的谐振频率升高,LCL 滤波器的谐波效果下降,结论与3.3节中结果一致.
因此,实验结果验证了平均电容电压前馈可以提高系统的谐波抑制能力和鲁棒性,具有良好的有源阻尼效果.
4 结 论
本文以LCL型三相并网逆变器为研究对象,为ICF电流控制建立了无差拍平均模型,并提出了一种平均电容电压前馈的预测无差拍平均模型控制方法. 本文所提方法具有以下优点:
1)采用过采样方法,为ICF电流环建立了具有明确物理意义的无差拍平均模型,能够准确地描述实际系统的平均状态,从控制模型层面改善了电流控制的抗干扰性能和稳态性能.
2)在所建立控制模型的基础上,引入结合双重PWM更新的预测控制,提出预测无差拍平均模型控制,将系统延时对ICF电流环的影响最小化,提高了系统的稳定性和鲁棒性,并推导出控制方法的稳定域,为逆变器参数配置提供指导.
3)基于所提控制方法,提出平均电容电压前馈法,克服了数字系统延时对有源阻尼的影响,具有良好的阻尼效果,进一步加强了系统的鲁棒性.
参考文献
[1] RAHMAN M M,BISWAS S P,ISLAM M R,et al.An advancednonlinear controller for the LCL-type three-phase grid-connectedsolar photovoltaic system with a DC-DC converter[J]. IEEESystems Journal, 2022, 16(2): 3203-3214.
[2] IBRAHIM N F,MAHMOUD M M,AL THAIBAN A M H,et al.Operation of grid-connected PV system with ANN-based MPPTand an optimized LCL filter using GRG algorithm for enhancedpower quality[J].IEEE Access,2023,11:106859-106876.
[3] ZHANG H W,ZHAO Q S,WANG S H,et al.Improved repetitivecontrol for an LCL-type grid-tied inverter with frequency adaptivecapability in microgrids[J].Electronics,2023,12(7):1736.
[4] SAXENA N K,GUPTA A R,MEKHILEF S,et al. Fireflyalgorithm based LCL filtered grid-tied STATCOM design forreactive power compensation in SCIG based micro-grid[J].Energy Reports,2022,8:723-740.
[5] LI J L,LIANG Z H,LI G H,et al. Research on resonancemechanism and damping method of grid-connected inverter withLCL filter for battery energy storage system[J].Energy Reports,2022,8:194-205.
[6] 曾祥军,李凤婷,路亮,等.微网蓄电池储能系统滤波及并网控制策略[J].电力自动化设备,2017,37(4):45-51.
ZENG X J,LI F T,LU L,et al. BESS filtering and gridconnectioncontrol of microgrid[J]. Electric Power AutomationEquipment,2017,37(4):45-51.(in Chinese)
[7] XU J M,XIE S J. LCL-resonance damping strategies for gridconnectedinverters with LCL filters:a comprehensive review[J].Journal of Modern Power Systems and Clean Energy,2018,6(2):292-305.
[8] ZOU C Y,LIU B Y,DUAN S X,et al. Influence of delay onsystem stability and delay optimization of grid-connected inverterswith LCL filter[J].IEEE Transactions on Industrial Informatics,2014,10(3):1775-1784.
[9] WANG J G,YAN J D,JIANG L,et al. Delay-dependent stabilityof single-loop controlled grid-connected inverters with LCLfilters[J]. IEEE Transactions on Power Electronics, 2016,31(1):743-757.
[10] BERES R N,WANG X F,LISERRE M,et al.A review of passivepower filters for three-phase grid-connected voltage-sourceconverters[J].IEEE Journal of Emerging and Selected Topics inPower Electronics,2016,4(1):54-69.
[11] 李智,张中华,刘辉,等.LCL型储能虚拟同步发电机谐波谐振特性分析与抑制策略[J]. 太阳能学报,2020,41(10):101-108.
LI Z,ZHANG Z H,LIU H,et al. Harmonic resonancecharacteristics analysis and suppression strategy of LCL energystorage virtual synchronous generator[J]. Acta Energiae SolarisSinica,2020,41(10):101-108.(in Chinese)
[12] LI S J,LIN H. A capacitor-current-feedback positive activedamping control strategy for LCL-type grid-connected inverter toachieve high robustness[J]. IEEE Transactions on PowerElectronics,2022,37(6):6462-6474.
[13] 刘鸿鹏,边新新,张伟,等.扩大有效阻尼区的改进型电容电流反馈有源阻尼策略[J].高电压技术,2022,48(1):114-124.
LIU H P,BIAN X X,ZHANG W,et al. Novel capacitor currentfeedback active damping strategy for extending the range ofequivalent virtual damping[J].High Voltage Engineering,2022,48(1):114-124.(in Chinese)
[14] 薛睿南, 李国进, 陈延明.自适应陷波滤波器的并网逆变器相位超前补偿方法[J]. 哈尔滨工业大学学报,2023,55(7):124-132.
XUE R N, LI G J, CHEN Y M. Phase lead compensation method ofgrid-connected inverter with adaptive notch filter[J]. Journal ofHarbin Institute of Technology,2023,55(7):124-132.(in Chinese)
[15] LYU Z K,WU L J. Resonant frequency deviation analysis andmodified notch filter-based active damping for SiC-based PMSMdrive with sine wave filter[J]. IEEE Transactions on EnergyConversion,2023,38(1):417-427.
[16] ZHANG H,RUAN X B, LIN Z H,et al. Capacitor voltage fullfeedback scheme for LCL-type grid-connected inverter tosuppress current distortion due to grid voltage harmonics[J]. IEEETransactions on Power Electronics,2021,36(3):2996-3006.
[17] 牛晨晖, 肖华平, 李明明, 等. 一种等效微分环节反馈滤波电容电压实现有源阻尼的方法[J]. 电力自动化设备, 2023,43(6): 204-210.
NIU C H, XIAO H P, LI M M, et al.Method of achieving activedamping by filter capacitor voltage feedback with equivalentdifferential link[J]. Electric Power Automation Equipment,2023,43(6): 204-210.(in Chinese)
[18] PEÑA-ALZOLA R,ROLDÁN-PÉREZ J,BUENO E,et al.Robust active damping in LCL-filter-based medium-voltageparallel grid inverters for wind turbines[J]. IEEE Transactionson Power Electronics,2018,33(12):10846-10857.
[19] ZHANG H,WANG X H,HE Y Y,et al.A compensation methodto eliminate the impact of time delay on capacitor-current activedamping[J].IEEE Transactions on Industrial Electronics,2022,69(7): 7512-7516.
[20] BÖCKER J,BUCHHOLZ O. Can oversampling improve thedynamics of PWM controls?[C]//2013 IEEE InternationalConference on Industrial Technology (ICIT), February 25-28,2013. Cape Town,South Africa:IEEE, 2013: 1818-1824.
[21] ZHANG X T,SPENCER J W. Study of multisampled multilevelinverters to improve control performance[J]. IEEE Transactionson Power Electronics, 2012, 27(11): 4409-4416.
[22] LU M H,WANG X F,LOH P C,et al. Graphical evaluation oftime-delay compensation techniques for digitally controlledconverters[J]. IEEE Transactions on Power Electronics, 2018,33(3): 2601-2614.
[23] ZHOU L L, ZHOU Z,QI J, et al. Hybrid prediction-baseddeadbeat control for a high-performance shunt active powerfilter[J].IEEE Access,2023,11:11118-11131.
[24] 丁欣,施睿清,薛睿南,等.弱电网下LCL型单相并网逆变器的鲁棒延时补偿策略[J].太阳能学报,2023,44(5):162-170.
DING X,SHI R Q,XUE R N,et al. Robust delay compensationstategy for lcl single-phase grid-connected inverter under weakgrid[J]. Acta Energiae Solaris Sinica,2023,44(5):162-170.(inChinese)
[25] 李建文,阮筱菲,李永刚,等.弱电网下多LCL型并网逆变器谐振模态分析[J].太阳能学报,2021,42(2):346-355.
LI J W,RUAN X F,LI Y G,et al.Resonance modal analysis formultiple LCL-type grid-connected inverters in weak grid[J].Acta Energiae Solaris Sinica,2021,42(2):346-355.(in Chinese)
[26] LIU B Y,WEI Q K,ZOU C Y,et al. Stability analysis of LCLtypegrid-connected inverter under single-loop inverter-sidecurrent control with capacitor voltage feedforward[J]. IEEETransactions on Industrial Informatics,2018,14(2): 691-702.
[27] RAMAIAH S,LAKSHMINARASAMMA N,MISHRA M K.Lossmodulated deadbeat control for grid connected inverter system[J].IEEE Journal of Emerging and Selected Topics in PowerElectronics,2023,11(4):3715-3725.
[28] DONG X F,LI H.A PLL-less voltage sensorless direct deadbeatcontrol for a SiC grid-tied inverter with LVRT capability underwide-range grid impedance[J]. IEEE Transactions on PowerElectronics,2023,38(8):9469-9481.
[29] ZHANG W F,YU Y H.Comparison of three SVPWM strategies[J].Journal of Electronic Science and Technology of China, 2007,5(3): 283-287.
[30] YE S,JIANG J G,JIANG J Y,et al. A dynamic-segmentalternatingSVPWM for a five-level NNPP converter with neutralpointvoltage control[J]. IEEE Transactions on Power Electronics,2021, 36(9): 10612-10626.
[31] CHILIPI R R, AL SAYARI N, BEIG A R, et al. A multitaskingcontrol algorithm for grid-connected inverters in distributedgeneration applications using adaptive noise cancellationfilters[J]. IEEE Transactions on Energy Conversion, 2016,31(2): 714-727.
[32] DU L W,LI M X,TANG Z,et al. A fast positive sequencecomponents extraction method with noise immunity in unbalancedgrids[J]. IEEE Transactions on Power Electronics, 2020, 35(7):6682-6685.
[33] 赫玉莹. LCL型并网逆变器的谐振抑制策略研究[D]. 武汉: 华中科技大学, 2021.
HE Y Y. Research on resonance suppression strategy of LCL gridconnectedinverter[D]. Wuhan:Huazhong University of Scienceand Technology, 2021.(in Chinese)
[34] DIERK S, BÖCKER J. Elektrische antriebe-regelung vonantriebssystemen[M]. Berlin:Springer,2009: 224-252.
基金项目:国家自然科学基金委智能电网联合基金项目(U2166602),Integration Projects of National Natural Science Foundation of China-State Grid Joint Fund for Smart Grid( U2166602)