
多形态爬楼扫拖一体化机器人设计
2025-02-24 00:00:00孙含冰王玉勤杨家诚韩信邵家乐
河南科技 2025年1期


摘 要:【目的】在现代智能家居领域中,清洁机器人逐渐成为提升生活质量的关键设备。然而,现有的清洁设备在对楼梯和跨楼层进行清洁时仍面临着挑战。为了克服这些限制,设计出一款多形态爬楼扫拖一体化机器人,其能自动适应复杂的家庭和商业环境,实现高效且全面的清洁。【方法】通过分析多形态爬楼扫拖一体化机器人在楼梯上的运动方式,构建机器人三维结构模型,并利用SolidWorks软件对三臂边刷和拖布传动叶片进行有限元分析。【结果】通过集成视觉识别技术、智能路径规划及创新重心偏移和攀爬机制,不仅能提高机器人的清洁效率,还能增强操作的便利性和安全性。通过对比结构件的等效应力和位移量,发现数值均在允许范围内,符合设计要求,确保了机器人结构的合理性和零件强度。【结论】该设计有望推动清洁机器人技术的发展,且在市场上具有广阔的应用潜力。
关键词:多形态机器人;扫拖一体化;自动化清洁;视觉识别系统
中图分类号:TH137.5" " "文献标志码:A" " 文章编号:1003-5168(2025)01-0028-05
DOI:10.19968/j.cnki.hnkj.1003-5168.2025.01.005
Design of Multi-Form Climbing, Sweeping and Wiping Integrated
Robot
SUN Hanbing WANG Yuqin YANG Jiacheng HAN Xin SHAO Jiale
(School of Mechanical Engineering, Chaohu University, Hefei 238024, China)
Abstract:[Purposes] In the field of modern smart home, cleaning robots are gradually becoming a key factor to improve the quality of life. However, the existing cleaning equipment still faces challenges when dealing with stairs and cross-floor cleaning. In order to overcome these limitations, this paper designed a multi-form climbing, sweeping and wiping integrated robot, which can automatically adapt to the complex family and business environment and realize efficient and comprehensive cleaning. [Methods] By analyzing the movement mode of the multi-form climbing, sweeping and wiping integrated robot crawling on the stairs, the three-dimensional structure model of the robot is constructed. And the finite element analysis of three-arm side brush and mop drive blade was carried out by SolidWorks software. [Findings] By integrating visual recognition technology and intelligent path planning, and innovating the mechanism of gravity center shift and climbing, the robot not only improves the cleaning efficiency, but also enhances the convenience and safety of operation. By comparing the equivalent stress and displacement of structural parts, it was found that the values were within the allowable range and met the design requirements, which ensured the rationality of robot structure and the strength of parts.[Conclusions] This design is expected to promote the development of clean robot technology and has broad application potential in the market.
Keywords: multi-form robot; sweeping and wiping integrated; automatic cleaning; visual recognition system
收稿日期:2023-08-13
基金项目:巢湖学院大学生创新创业项目“一尘不染——多形态楼梯清洁机器人”(X202410380107);安徽省传统专业改造提升项目“机械设计制造及其自动化专业改造提升”(2021zygzts039);安徽省虚拟仿真实验教学项目“数控加工虚拟仿真实验教学项目”(2021xnfzxm070)。
作者简介:孙含冰(2005—),男,本科生,研究方向:机械制造。
通信作者:王玉勤(1985—),男,硕士,副教授,研究方向:机械系统测试与控制。
0 引言
随着人们居住环境质量的提升,消费者对智能家居产品的接受度显著提高,智能家居产业发展迅速,能自主清理地面的机器产品备受青睐。
常见的家用扫地机器人通常体积较小,清理区域较小,且无法爬楼,只能在预设范围内工作,最终返回固定位置。而公共场所(如商场等大型建筑内)还采用地面清洗机,但这种机器往往较为笨重,需要人员驾驶操作,且对一些角落的清洁效果可能不尽如人意,而且其只能清扫二维平面,无法进行楼梯和跨楼层的清洁。为了实现楼梯和跨楼层清洁,已有科技人员开展一系列研究。卢桂萍等[1]采用Arduino技术设计出楼梯自适应式清洁机器人,有效解决了楼梯清洁的自动化问题,提高清洁效率和可靠性。张明坤等[2]基于目标导向技术,对扫地机器人进行优化设计,提高了扫地机器人的导航能力和清洁效率。苏雷等[3]对楼梯清洁机器人爬楼规划进行研究,并对机器人的爬楼路径进行优化,从而提高清洁效率。王福鑫等[4]对楼道智能清扫机进行设计研究,通过创新设计,增强清扫机的智能化水平和操作的便利性。
为提高清理效率,并实现自动化楼梯清理,本研究设计一款集地面清理和楼梯清理于一体的多形态扫拖一体化机器人,其能根据楼层平面图自主生成方便合理的清扫路径,工作人员也能根据需求规划清洁路线,指导该机器人按照规划的路线进行清理。该机器人能自主识别污垢、异物位置及楼梯位置。在爬梯过程中,机器人内置的重心偏移装置会防止其因重心较高而侧翻。该机器人前部装有三臂边刷,后部装有拖地装置,可实现扫拖一体化,且这两部分也能单独运行,从而减少人工干预,提高清理的智能化程度。
1 设计思路及工作原理
1.1 整体设计思路
所设计的多形态爬楼扫拖一体化机器人由视觉识别装置、清扫拖地装置、重心偏移装置等结构组成,装置主体结构模型如图1所示。多形态爬楼扫拖一体化机器人通过视觉识别装置分析识别周边环境的具体情况、垃圾或污垢的种类,从而规划出更为合适的清理路径;集成了清扫、拖地装置,能一次性完成扫地和拖地任务,大大节省了清洁时间[5];通过重心偏移装置并结合独特的运动方式,使其能跨楼层清扫,极大地提高了机器的泛用性。
1.2 工作原理
多形态爬楼扫拖一体化机器人配备先进的视觉识别装置,能边工作边识别周边环境,并判断垃圾或污垢类型[6]。将视觉识别装置采集到的图像数据上传至芯片内部进行分析和判断,使机器人能自主规划最优的清理轨迹,提高工作效率。当遇到楼梯时,机器人采用独特的攀爬方式,包括利用重心偏移装置和三段式结构。机器人前部抬升后,重心移至前端,此时前部的移动辅助轮和三臂边刷提供支撑,保持稳定。然后,机器人依次抬升中部和后部,完成攀爬。机器人将记忆此行为,并对重复场景重复攀爬路径,实现连续攀爬楼梯。
在清理过程中,机器人将生成一张详细的楼层图,用于标注机器运行轨迹、无法处理的异物位置和无法清扫的位置。这种设计方便工作人员进行检查与分析,或对无法处理的位置进行人工操作清理,保证清理的高效和彻底。
2 关键机构设计
2.1 清洁模块
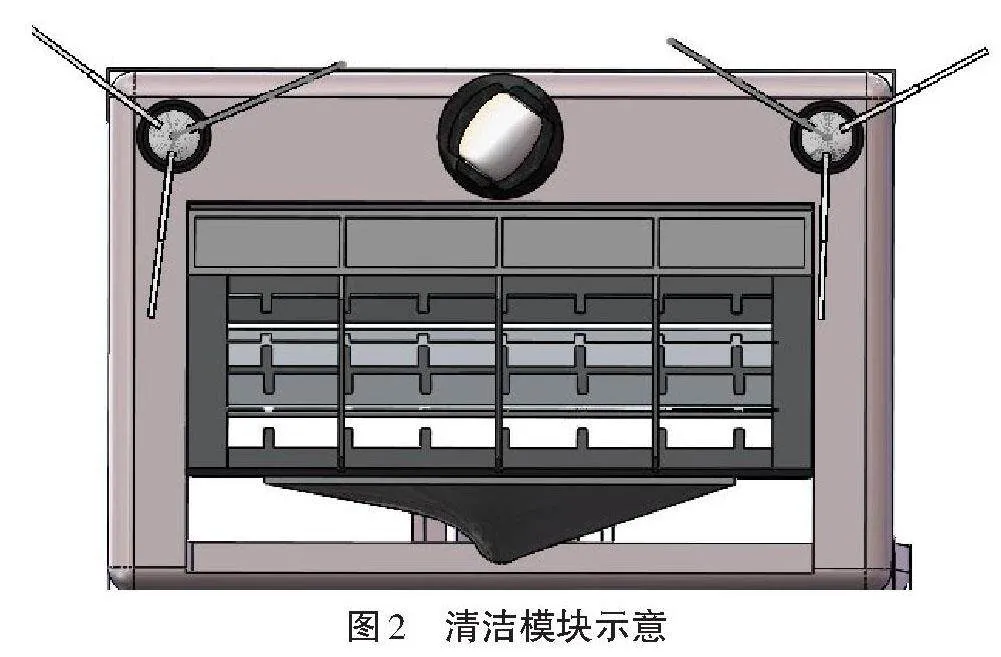
多形态爬楼扫拖一体化机器人配备了具有先进吸尘技术的清洁模块,其由清扫和吸尘这两个子模块组成,如图2所示。清扫模块具有强大的清洁能力,前方的三臂边刷通过高速旋转将灰尘、毛发、污渍等杂物卷起,并吸入机器内部,甚至较大异物也能扫入储存箱;吸尘模块能彻底清除微小灰尘和颗粒,弥补边刷无法将细小污渍扫进储存箱的不足。清扫模块与吸尘模块相互搭配,将杂物扫至吸风口,然后由吸尘装置吸入储存箱,能有效清理各种污渍,提高机器的泛用性。相较于传统的扫地机器人和扫帚,该机器人具有更卓越的清洁能力[7]。此外,该机器人配备大容量的储存箱,能储存更多的污垢和异物,减少频繁清理尘盒带来的麻烦,延长其一次作业的工作时间。
2.2 视觉识别装置
视觉识别装置安装在机器人顶部,能全方位采集周围环境信息,以便机器人快速对环境做出反应。视觉装置与独立芯片相结合,将识别到的图像上传到中央芯片中进行分析处理[8],并将处理结果通过智能系统发送至手机APP,以便工作人员及时查看机器人的工作状态和环境。同时,深度处理后发送至机器的驱动装置,使机器人能自主执行下一步操作,实现移动和清洁。机器人能自主识别污垢及异物的形状、大小,判断是否能被吸收清理。若遇到无法吸入储存室的异物,机器人记忆后会传递给工作人员,并自动避让。
机器人还能识别每节楼梯的高度,调整上升高度,确保平稳攀爬。最终,基于汇总的数据生成详细楼层图,包括机器人工作轨迹和无法识别或吸收的异物位置,以便工作人员指导机器。
2.3 重心偏移和攀爬装置
机器人配备了分段式滑轨和配重滑块的重心偏移装置(安装在机器内部顶部)[9]。为实现机器人爬梯功能,将机器人分为三部分,分段式滑轨也相应分为三段,每部分配备一段滑轨。当机器人遇到楼梯时,滑轨上的配重滑块向机器人后方移动至中间,使其重心后移。随后,最前面部分抬升到楼梯高度,以该部分为支点,抬升中间部分。接着,配重滑块移至最前面,将重心转移至前端,机器人随后抬起后部。攀爬装置与重心偏移装置相结合,防止因重心不稳而导致机器人反转,确保爬梯过程安全高效。攀爬完成后,机器人在楼梯上工作,并自动记忆此行为,以便在之后遇到楼梯时重复执行,实现自动化攀爬。
2.4 拖洗装置
机器人配备清扫和拖洗装置,真正实现了扫拖一体化[10]。拖洗装置由水箱、清洁拖布的装置和拖布构成。清扫装置采用拖布环形滚动系统,将拖布分为两部分,仅使用其中一段,另一段备用。运行一段时间后,自动切换至另一段拖布,并对前一段进行清洗。这种设计避免频繁清理工具,只需要在清洁结束后更换水箱内的水,极大节省人力,提高清洁效率。
此外,拖洗装置还装配了升降装置,在不需要拖洗的场景中升起拖洗装置,使清扫装置独立运行。同样地,对不需要清扫的场景,也可只使用拖洗装置。这样的设计扩大了机器的应用范围,满足更多清洁需求。
2.5 五轮驱动装置
机器人搭载了五个轮子以实现移动,包括两个驱动轮、两个支撑轮和一个辅助轮,具有两种运动模式[11]。一是驱动轮平行排列(标准运行模式),类似于汽车前轮,支撑轮自由旋转,辅助轮使机器左右偏转,用于清洁地面。二是驱动轮直线排列,即将轮子绕固定轴旋转90°,类似于汽车同侧轮排列,固定其中一个支撑轮,将其作为支点,实现机器的直角转弯。这种模式适用于墙角或楼梯清洁时调整方向,提高转向的便捷性。
3 主要结构件有限元分析
由于机器人需要长时间处理异物和污垢,因此,其工作件(包括清扫装置和底盘)均由高强度合金钢制成。此外,机器人搭配了拖洗装置,部分零件也采用304不锈钢。通过有限元分析对三臂边刷和拖布传动叶片进行检测,确保机器材料的强度符合要求。
3.1 三臂边刷静力学分析
三臂边刷是用三条高强度合金钢制成的清扫臂,具有高硬度和优良的耐磨性、耐腐蚀性。边刷合理均匀地排列在中心圆盘上,形成有序的布局。清扫臂由中心圆盘连接至中间工作马达,确保工作时的稳定性。在工作过程中,机器人主要受三臂边刷装置施加的指向切线方向的压力及地面对边刷的垂直向上弹力,这对零件的硬度和耐磨性提出更高的要求。为确保机器人在极端环境下保持安全运转的同时,还能发挥最大性能,对其进行有限元分析,对清扫臂施加一个垂直地面向下的压力,三臂边刷弹性模量为2.1×1011 N/m2,泊松比为0.28,张力强度为7.2×108 N/m2,屈服强度为6.2×108 N/m2,其应力云图和位移云图如图3所示。
由图3可知,对三臂边刷施加5 N压力,所受到的反作用力为4.8 N,等效应力的最大值为3.2×108 N/m2,小于零件的张力强度(7.2×108 N/m2),最大位移量为3.3 mm。由此可知,三臂边刷的强度和变形量均在合理范围内,符合设计要求。
3.2 拖布传动叶片静力学分析
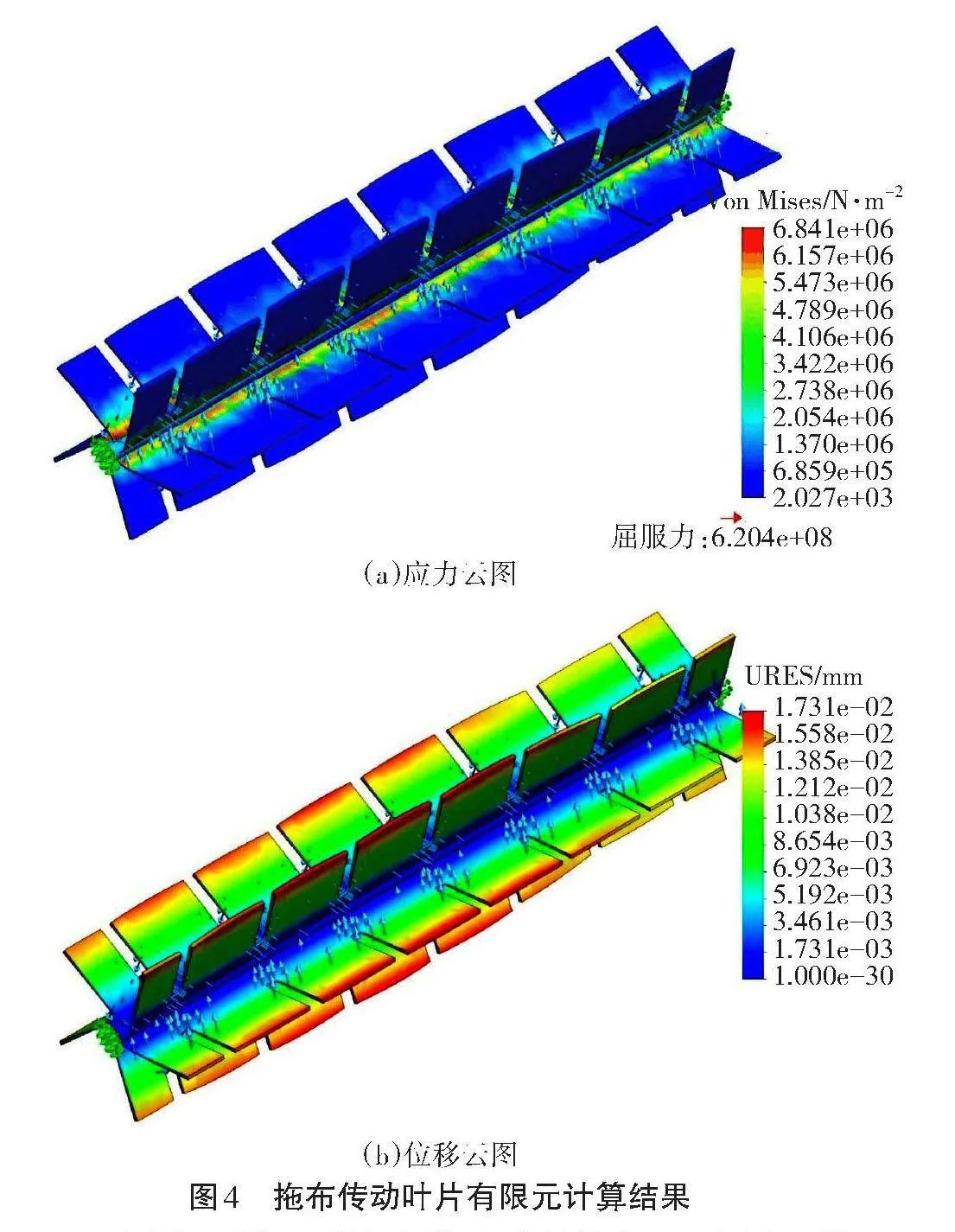
拖布传动叶片由304不锈钢制成,具有较强的耐腐蚀性和较高的硬度。五片相同的拖布传动叶片均匀排列,并与水接触,因此,提高拖布传动叶片零件的防腐蚀性尤为重要。此外,水起到润滑作用,所以在传动轴表面加装五片叶片,以增强叶片与拖布之间的摩擦力。工作时,机器受到沿叶片旋转切线方向的拖布摩擦力,使拖布带动传动轴运转。为了检验叶片的强度是否符合要求,对叶片进行静力学分析,施加垂直于叶片的压力以模拟拖布产生的摩擦力。拖布传动叶片弹性模量为2.1×1011 N/m2,泊松比为0.28,张力强度为7.2e×108 N/m2,屈服强度为7.0×108 N/m2,其应力云图和位移云图如图4所示。
由图4可知,对拖布传动叶片施加1 N压力,所受到的反作用力为1.8×10-7 N,等效应力的最大值为6.8×106 N/m2,远小于零件的张力强度(7.2×108 N/m2),最大位移量为0.017 mm。由此可知,拖布传动叶片的强度和变形量均在合理范围内,符合设计要求。
4 结语
本研究针对传统清扫和拖洗方式在楼梯清扫和跨楼层清扫时的不便,设计出一款机器人,用以弥补这一缺陷。该机器人配备了清扫和拖洗装置,并根据不同环境需求,实现清扫和拖洗装置的独立运行,从而实现真正的扫拖一体化。本研究为拖洗装置设计了拖布环形滚动系统和升降装置,进一步提高使用的便利性。此外,机器人还搭载了重心偏移装置,确保在爬楼梯过程中重心保持在较低位置,增强安全性。
在充分考虑了机器人的各项功能后,使用SolidWorks软件对机器人整体结构进行三维建模,并对三臂边刷和拖布传动叶片进行有限元分析,保障零件的强度和韧性,确保设计能满足所有要求。因此,本研究设计的机器人不仅自动化程度高、清扫效率高,而且具备楼层清理和跨楼层清理的能力,在市场上具有广阔的应用前景,为未来扫地机器人的发展提供技术借鉴。
参考文献:
[1]卢桂萍,李春雷,刘卓沄,等.基于Arduino的楼梯自适应式清洁机器人设计与实现[J].机电工程技术,2023,52(1):161-165.
[2]张明坤,王成军.基于目标导向的扫地机器人设计研究[J].齐齐哈尔大学学报(自然科学版),2019,35(1):39-42.
[3]苏雷,张磊,邵建根,等.楼梯清洁机器人的爬楼规划研究[J].江西师范大学学报(自然科学版),2023,47(1):77-81.
[4]王福鑫,魏楠,万世勇,等.楼道智能清扫机设计研究[J].造纸装备及材料,2020,49(3):124,128.
[5]廖铮,张凌浩.基于三维点云地图的扫地机器人智能清洁设计策略研究[J].设计,2022,35(9):82-85.
[6]叶鲁斌,刘皓月,张纪元,等.家居环境中的智能扫地机器人设计[J].计算机辅助设计与图形学学报,2023,35(2):262-272.
[7]欧雪霞.基于STM32的智能扫地小车的设计与实现[J].电子制作,2021(21):27-30.
[8]汤伟,高涵,刘思洋.基于树莓派的小型水域智能垃圾清理机器人系统设计与实现[J].科学技术与工程,2019,19(34):239-247.
[9]王义娜,刘赛男,王硕玉,等.全方位机器人的重心位置预测与轨迹跟踪控制[J].控制理论与应用,2024,41(1):145-154.
[10]王索蔚.扫拖洗烘四合一更全能米家免洗扫拖机器人[J].计算机与网络,2021,47(21):24-25.
[11]贾松敏,卢兴阳,张祥银,等.轮子打滑状态下全向移动机器人轨迹跟踪控制[J].控制与决策,2020,35(4):833-842.
