国内修井机技术发展现状与展望
2025-02-13 00:00:00何军国
石油矿场机械 2025年1期

摘"" 要:从修井机型谱、动力、节能、维护和标准化等方面,分析了国内修井机技术和应用现状,指出了修井机存在的问题。阐述了修井机自动化设备及其控制系统技术和应用现状,并从散热、集成控制技术、控制逻辑等方面指出了自动化修井机存在的问题,提出了修井机“ZMS策略”、“三停”、“三保护”以及“手、自、遥”多元控制技术等概念,修井机应向高端、绿色、智能方向发展。研究结果可为新型修井机研制与应用提供借鉴。
关键词:修井机;自动化;智能化;绿色;展望
中图分类号:TE935""""""""" 文献标志码:A"""""" doi:10.3969/j.issn.1001-3482.2025.01.003
文章编号:1001-3482(2025)01-0012-07
收稿日期: 2024-07-14
基金项目: 中国石化设备采购项目“小修电池储能修井机”(ZZ00202207039772 );中国石化设备采购项目“井下作业自动化装备”(QF00202205195959) 。
作者简介: 何军国(1970-),男,湖南益阳人,教授级高级工程师,硕士,现从事石油钻采装备研发,E-mail:jg-hjn@163.com。
Current Status and Trends of Workover Rig Technology in China
HE Junguo
(RG Petro-Machinery Group Co.,Ltd.,Nanyang 473006,China)
Abstract: The current status of workover rig technology and application in China was analyzed in terms of workover rig type, performance, energy saving, maintenance and standardization. Existing problems of workover rigs were presented. The automatic equipment and control system technology of workover rigs were analyzed, and the application and existing problems of heat dissipation, integrated control technology, and control logic were also described. The concept of \"ZMS strategy\", \"three-stop\", \"three-protection\", \"manual, automatic, and remote\" multi-control technology were put forward. The development direction of the workover rig to high-end, green, and?intelligent was proposed. It provides a reference for the development and application of a new type of workover rigs.
Key words: workover rig; automation; intelligence; green; prospect
为实现国家“碳达峰、碳中和”双碳目标,油气装备正在朝着绿色、智能方向发展。生活数字化和便利化改变了人们思想,重体力劳动行业向“操控安全、舒适,低作业强度”进行变革。我国修井机自动化技术和装备取得快速发展[1-4]。尤其是中国石化从2011年开始对修井机自动化进行布局,按照“机器化替人、自动化减人到智能化无人”的思路,稳步推进机械修井机升级改造。自动化修井机从2000年开始取得实质性突破,截至2023年,大部分机械修井机已更换为自动化修井机,并在胜利油田、中原油田、河南油田等油田建立了27个自动化修井作业示范区。近年来,中国石油也全面启动修井机自动化改造和升级换代工作。中国海油则按照成熟一个,应用一个的思路,逐步应用自动化修井工具或成套设备。
以市场为导向,国内修井机设计符合模块化、标准化、轻量化、系列化设计和差异化配置要求,整体技术达到国际先进水平。但自动化修井机仍存在自动化作业流程不成熟、自动化设备故障处理依赖OEM技术人员、修井机智能化尚有许多技术难题需要攻克等问题。
1 修井机总体技术现状
1.1 修井机型谱系列化
按照GB/T 23505—2017 《石油天然气工业 钻机和修井机》对修井机钩载能力的划分,目前市场能够提供额定钩载从350 kN到2 250 kN系列产品,且自动化修井机逐步取代机械修井机。
按作业场所划分,适应各种井场的修井机均有产品应用,包括陆地常规修井机、沙漠修井机、沼泽修井机、山地修井机、雨林修井机、海洋修井机等。
修井机研制厂家有南阳二机石油装备集团股份有限公司、中石化四机石油机械有限公司、天津市东方先科石油机械有限公司、兰州兰石石油装备工程有限公司等。
1.2 修井机动力多样化
为实现“双碳”目标,修井机由柴油机驱动为主走向油电双驱及纯电驱。最大钩载900 kN以下吨位修井机发展纯电驱修井机。最大钩载900 kN及以上修井机以油电双驱为主,柴油机主要作为行走动力,电动机作为作业动力,且修井作业用柴油机基本完成国产化替代,如潍柴系列发动机替代CAT系列发动机。相对柴油机驱动或电驱动修井机,液压驱动修井机在拖挂修井机或特种修井机上得到应用,例如不压井修井机、海上液压举升装置等。
1.3 修井机作业节能化
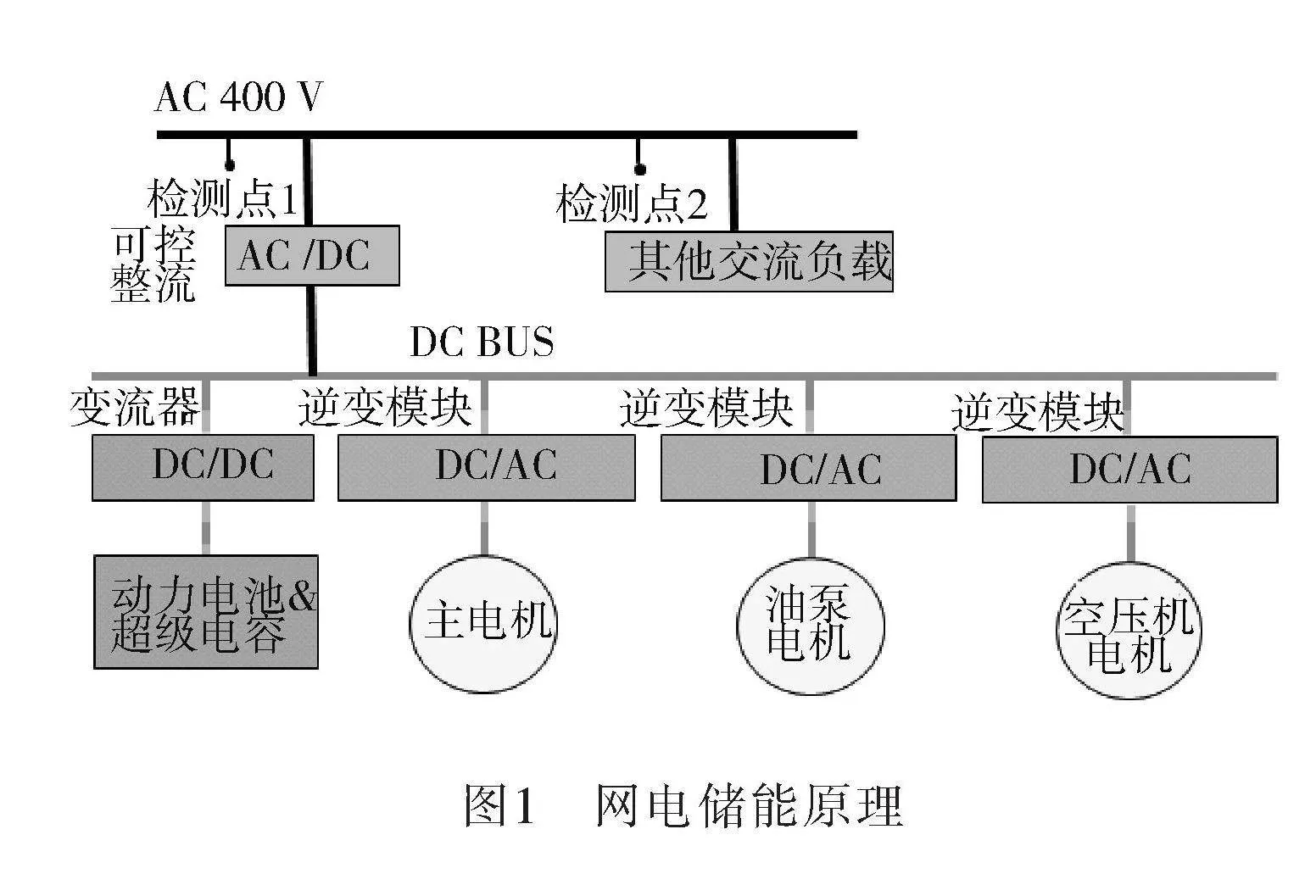
900 kN及以下吨位修井机大多采用网电储能电驱动。修井机储能方式包括电容储能、电池储能、液流储能、飞能储能等,目前主要采用磷酸铁锂电池储能,电池厂家有宁德时代、中航锂电、亿纬锂能等。网电储能修井机优先使用井口或发电机组电源,电池组也可作为动力源单独作业。储能系统的电池包及BMS通过四象限DC-DC变流器实现自动充电和放电,为修井作业提供持续电力补偿及重载下放钻具时的能量回收。在储能的同时,对修井机下放势能进行回收,进一步减少了修井能耗,相对传统柴油机作业,网电储能修井机节约修井能耗65%以上,网电储能原理如图1所示。
电动液压泵、电动空压机等采用低功耗设计,具备自动启停功能。修井机控制系统根据作业负荷调整功率分配,减少能耗。
1.4 修井机维护便利化
结合传感器精度与作业容许偏差,科学标定程序设定值与传感器测得值的偏差,超出标定偏差判定为故障。通过高精度传感器,先进信息传输技术及计算机技术等,建立修井机监控及故障远程专家诊断系统,实现设备现场运行参数的采集、远传、储存、查看、打印、报警、外部通讯以及故障的远程修复等,提高了修井机维护便利性。
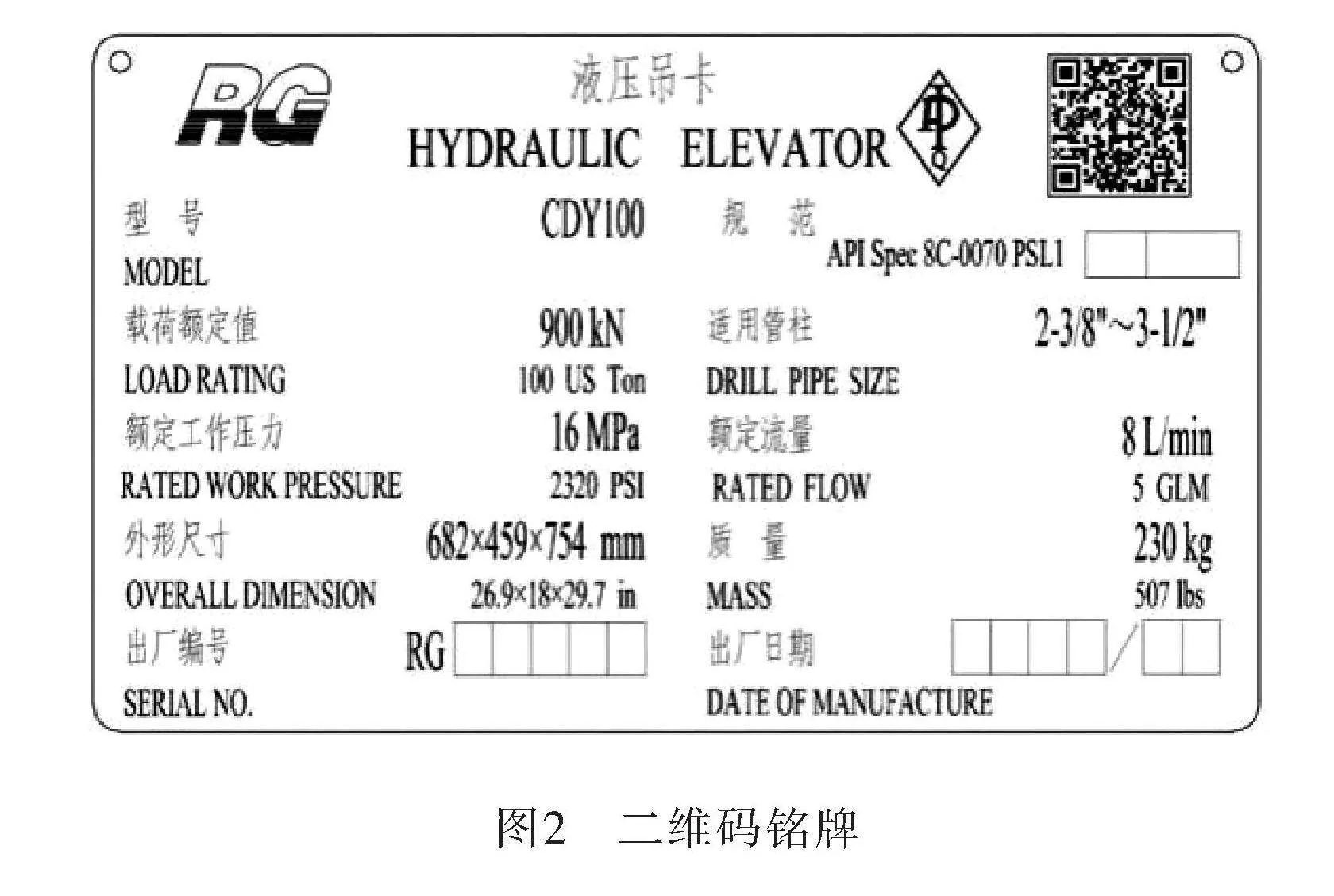
修井机运行参数包括但不限于游车参数(高度、速度、钩载)、钻压、大绳千牛米、立管压力、转盘参数(扭矩、转速)、吊钳扭矩、泵冲、泥浆参数(密度、液位、返浆流量)、液压系统参数(压力、油温、油质)、气路系统压力、发动机参数(转速、油压、油耗、油量、水温)、电动机参数(转速、电压、电流、转矩、温度)、动力电池参数(电压、电流、温度等)、电驱动控制参数(AFE整流、变频器、DC-DC变流器等参数)、载车倾斜角度、井架参数(安全锁销状态、倾角)、气动水冷辅助刹车参数(流量、水温、水压、气压)、起下钻井口防喷状态、环境参数(风速、气温、位置)、修井机运行时间等等,根据修井作业需要和修井机配置选配不同参数,参数经PLC和RTU收集处理,处理后的数据可在施工现场进行人机交互,同时通过RTU发送到云端,传输至远程监控系统。二维码铭牌如图2所示,二维码标识在修井机上的应用方便查阅设备信息。
1.5 修井机标准体系化
目前已形成相对完善的修井机标准化体系,既包括GB/T、SY/T等标准,还包括了近三年来新制订的T/CPI及T/CPSI标准。其中,GB/T、SY/T总结国内技术,吸纳了ISO、API、DNV-GL等国外标准技术,从修井机总体到部件,涵盖了技术、产品、检验等多个方面内容,形成100多个标准。T/CPI及T/CPSI则结合了国内有代表性企业的典型做法,对GB/T、SY/T未涉及产品或技术进行归纳、总结,形成了具有共性要求的团体标准。现有修井机标准化体系既指导修井机研发与应用,又促进修井机技术发展,起到了标准引领和质量支撑的作用。
1.6 修井机存在的技术问题
机械式修井机自上世纪九十年代从国外引进到国产替代,经过三十多年的发展,已技术可靠,应用成熟。自动化修井机经过本世纪十多年的摸索,近年来取得快速发展。但面对新时代“高端、绿色、智能”的要求,需要进一步提高修井机自动化程度及自动控制性能稳定性。
2 修井机自动化技术现状
2.1 自动化工具和设备发展迅速
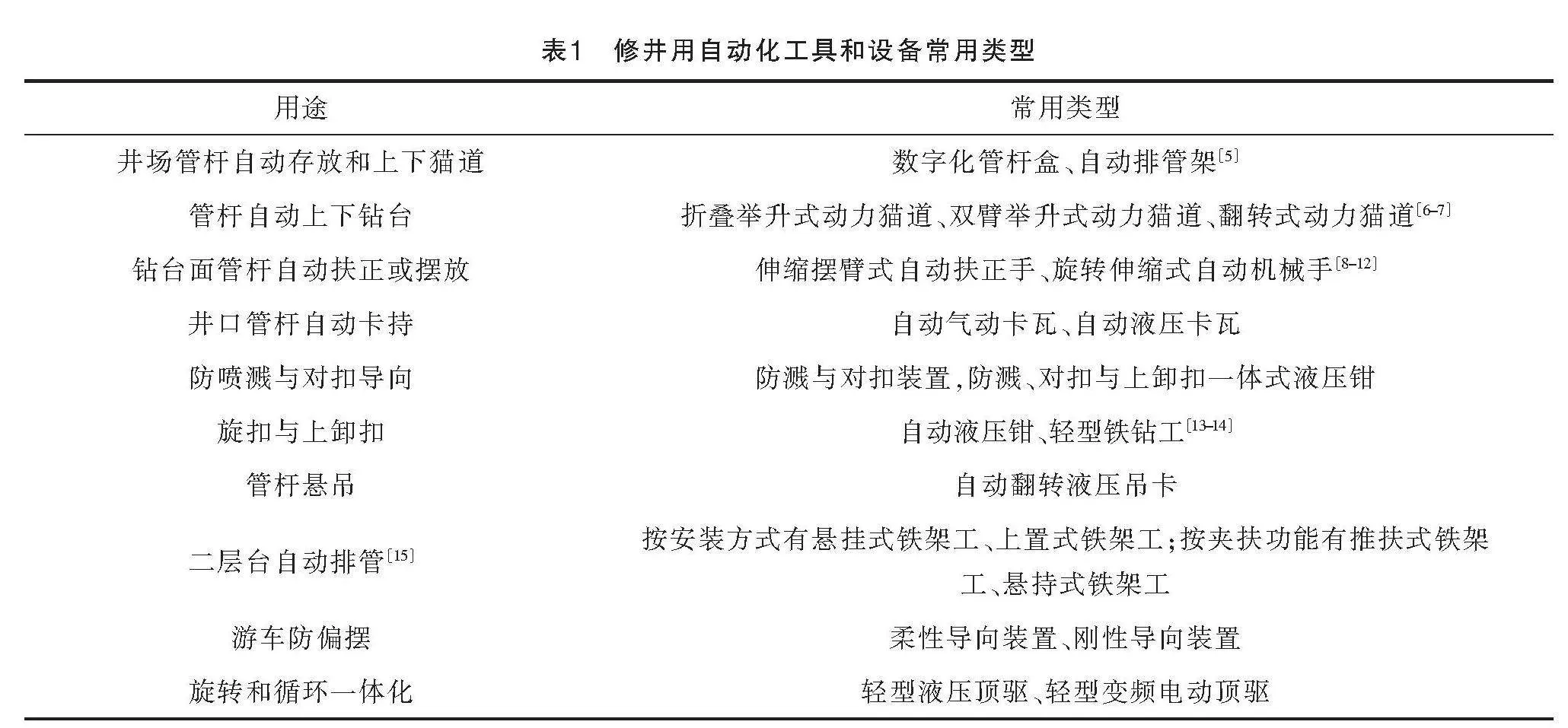
修井用自动化工具和设备常用类型如表1所示。近几年来,一方面个别钻机自动化工具和设备用于修井自动化,另一方面修井专用自动化工具和设备取得快速发展,修井自动化设备研制厂家有南阳二机石油装备集团股份有限公司、三一能源装备有限公司、胜利油田胜机石油装备有限公司、北京捷杰西石油设备有限公司等。
钻台面管杆自动扶正或摆放装置、二层台自动排管装置的位置精度通常取3~5 mm,单个动作周期通常为30~45 s。
在各类修井自动化工具和设备中,动力猫道种类相对较多,品种齐全。从猫道移运方式来说,既有橇装式,又有拖挂式;从驱动方式来说,既有全液压式,又有全电驱式;从管杆上下钻台来说,既有折叠举升式、单臂举升式,双臂举升式,又有垂直翻转式;按管杆进出动力猫道方式又分为推滚式、钩臂式、抓手式、磁吸式等结构。
2.2 自动化控制技术应用广泛
目前关键修井工艺基本实现流程化一键操作,如一键上管杆(包括自动测长及涂抹丝扣油)、一键甩钻、一键起钻、一键下钻、一键抢喷、一键紧急关井等,且一些自动化控制系统获得了软件著作权[16-17]。开发自动化控制程序,除修井机生产厂家外,还有专业的电控生产厂家,如北京四利通控制技术股份有限公司、北京西威嘉业科技有限公司、天津同创达科电气设备有限公司、天津瑞灵石油设备股份有限公司等。
小修作业主要为提升与下放作业,容易实现修井全过程自动化,小修综合作业效率达35~48 根/h。大修作业工艺相对复杂且不固定,自动化控制系统尚不成熟,大多采取半自动化方式,大修综合作业效率达25~38 根/h。
变频器、传感器、伺服电机等在内的自动化控制系统关键设备或元器件以进口为主。自动化控制系统用传感器包括旋转编码器、接近式编码器、胶囊式压力传感器、拉力传感器、拉线式行程传感器、超声波液位传感器、涡磁式流量传感器、三轴陀螺仪角度传感器、全金属风速传感器等。伺服电机、伺服电缸在自动化修井机中广泛应用,技术成熟。
联动控制与互锁技术的应用提高了修井机安全性。例如,通过绞车和游车运行参数与盘刹自动控制系统集成,自动控制盘刹工作钳、安全钳、刹车气缸、辅助刹车等,实现超速自动减速、缓降、软着陆,防止游车大钩上碰、下砸。
VI技术在自动化修井机中逐步应用。应用VI技术对管杆本体及接箍进行图相识别和分析,精准判断其坐标位置,实现管杆运动、上卸扣全过程实时监测,代替人眼识别和人工判断,确保接箍的准确连接与分离,助力实现连续起下管杆流程的自动化。VI设备及技术满足油基、水基、丝扣油、雨天、夜晚、强光等复杂环境下的精确识别要求[18-19]。
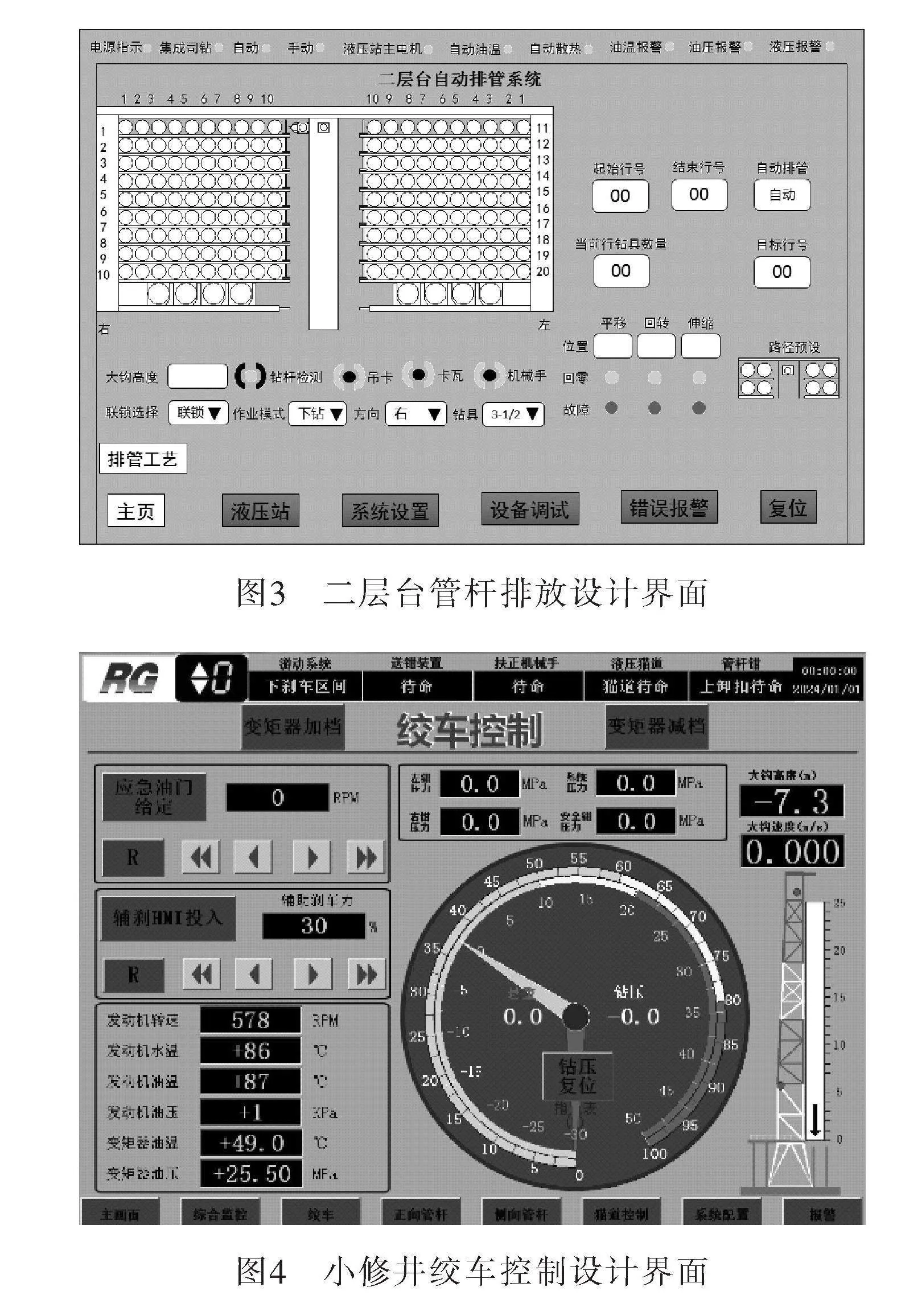
司钻控制系统对关键作业参数实现数显与图显相结合,二层台管杆排放设计界面如图3所示,既实时显示二层台管杆排放数量,又实时图示管杆排放位置。小修井绞车控制设计界面如图4所示,既实时显示游动系统在井架的高度数值,又图示在井架的工作位置;指重表既图示钩载,又有数字显示。
区域安全管理系统(ZMS)嵌入自动化控制系统。如表2所示为 ZMS策略表,ZMS可保障修井机各项动作的关联满足防碰撞、防坠落、防拉扯的要求,
例如游车下放甩钻时,猫道滑车应同时下滑,防止管杆上端顶井架;往二层台排管时,在铁架工机械手关闭前,不能打开吊卡,防止管杆坠落;液压钳上扣时,不能提升游车等。"
2.3 自动化作业系统存在的问题及应对措施
2.3.1 设备或系统发热需要治理
需要充分考虑自动化修井机传动部件的散热,防止齿轮箱、链条箱、传动轴等过快磨损。
电气设备或其控制系统发热,影响工作稳定性,甚至损坏设备。电池、电气设备及控制柜等需要采用耐热材料和易散热结构,并且采取强制通风或冷却措施。
为防止液压系统元器件损坏或系统性能下降,必要时设计液压油强制冷却系统。液压修井机通常采用负载敏感技术来降低能耗,减少系统发热。
空压机及控制箱除了需要适应野外作业的能力,满足防雨防尘防振的要求,也需要有足够的润滑,根据控制逻辑自动启停冷却风机,防止空压机轴承及电机烧毁。
2.3.2 司钻集成控制技术有待提高
目前司钻控制大多为分散式控制或部分集成式控制,控制系统复杂容易导致操作者疲劳、操作失误。
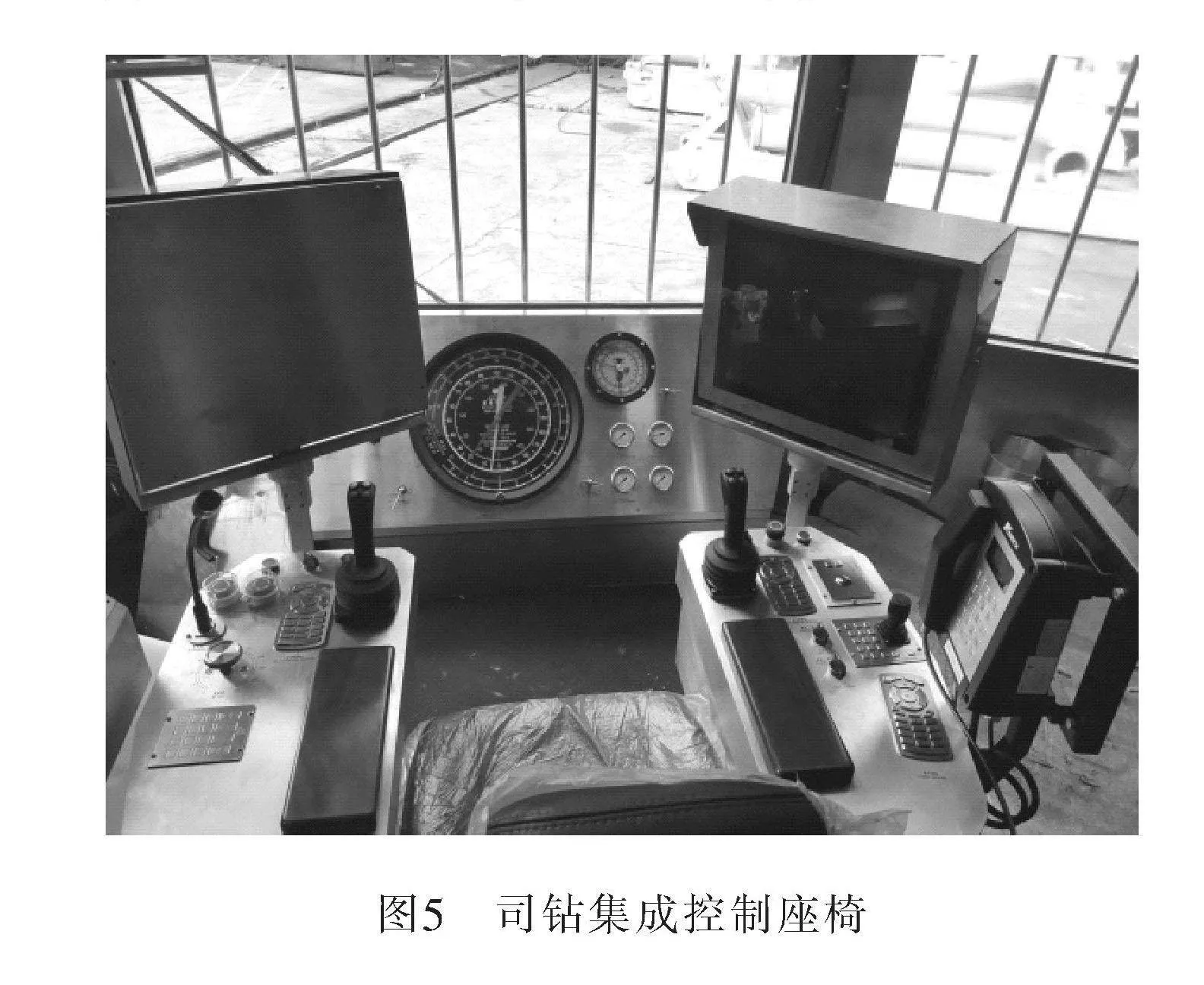
司钻集成控制座椅如图5所示,司钻控制系统需要集成所有设备的控制,例如数字管杆盒、自动猫道、钻台扶正手、铁钻工、动力吊卡、二层台自动排管装置、顶驱、泥浆泵、井控系统等。修井机大多采用单司钻控全程的模式。
按照修井工艺要求,区分经常动作、偶尔动作与应急动作,重点监控参数与辅助监控参数,对操控屏进行科学分屏设计和分画面设计。
2.3.3 自动控制逻辑的合理性有待优化
自动化控制系统需要在安全、可靠、适用的基础上再追求先进性和高效性。
网电储能修井机电池备用模式下,例如给生活营区供电,可采用满充满放模式。而修井作业时则须留有一定的充放裕度,例如电池在满电情况下重载下放,无法充电进行势能回收,可能出现电机反拖失效,产生大量热能,且能耗制动又不能满足刹车要求时,若主刹车也反应不及时,则容易出现溜钻现象,因此需要优化电池充放电程序,避免上述现象发生。为便于电量校准,通常需要对电池每月充满一次。在满电情况下,立即下放管杆需要预先放电2%以上,防止下砸的安全距离宜设置在1.5 m以上。
BMS具备开机自检、数据采集、SOC估算、故障实时监测、均衡保护、通讯、热管理等功能。修井机的BMS、电控系统(ECS)与修井工艺三者之间需要有机融合。电池具有快速的充放电特性,充放电可快速切换,绞车突然下放重载及重载快速刹车时,控制直流母线不出现过电压现象,逆向发电不应回馈井场电网,以免对电网形成冲击。
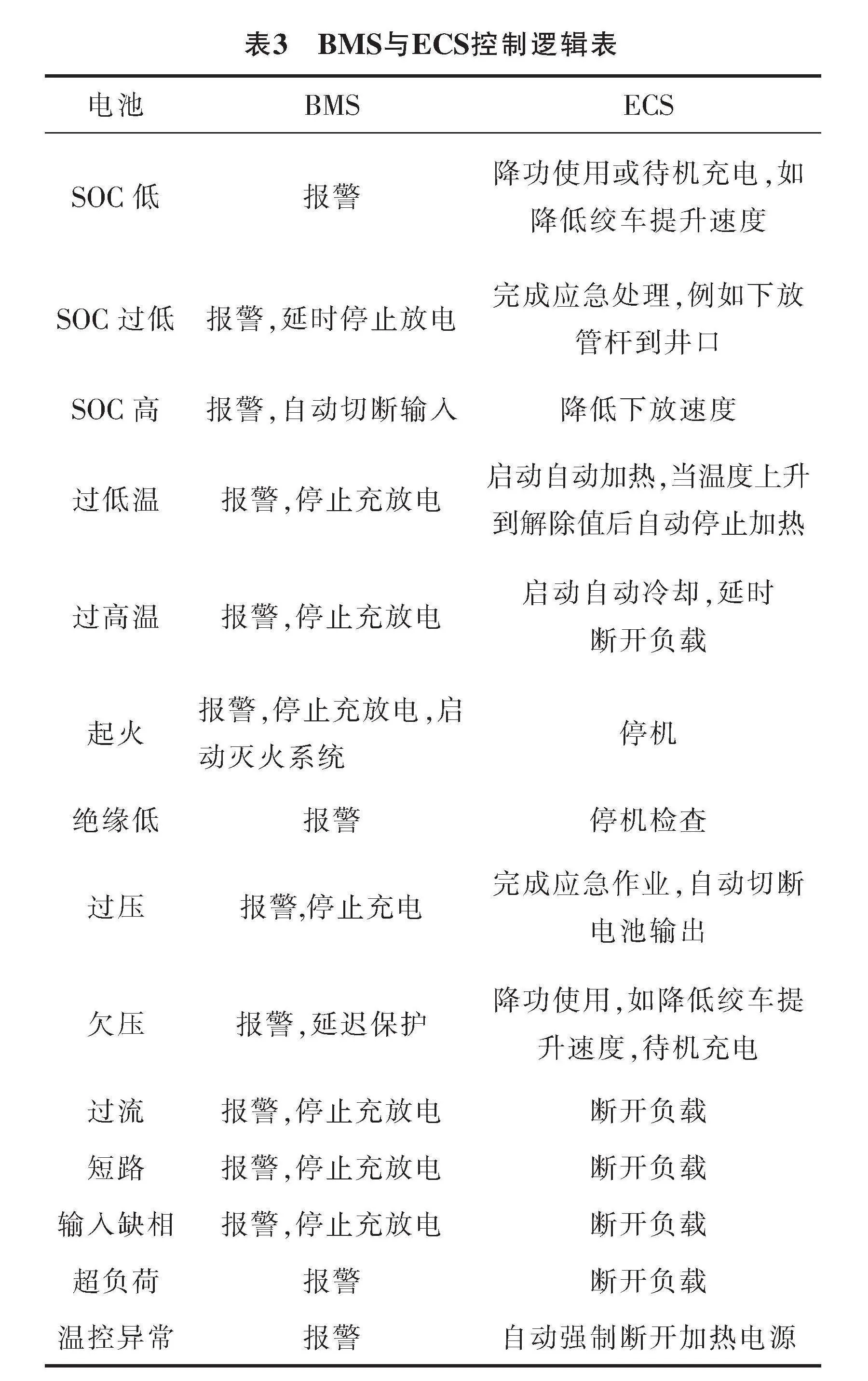
BMS触发电池保护可能导致ECS无法工作。BMS与ECS控制逻辑表如表3所示,当电池出现一般报警现象时,ECS应能操控修井机降速、降功使用或延迟停机,以保证井架内运行的管杆下放到井口并座实或者处理完其它应急作业。电池温度监控参数需要按充电和放电两种状态设置不同参数,充电状态高温限值比放电状态要小2~3 ℃,夏季高温限值比冬季设置要小。储能作业应考虑井场可充电与无充电两种情况。
空压机启停压力与修井机用气压力匹配,才能保证作业正常进行。假定气动盘刹安全钳工作压力低于0.7 MPa,则触发低气压自动刹车。气路系统压力大于0.9 MPa时,空压机自动停机,低于0.6 MPa时,空压机自动启动。当空压机处于自动停机而不会自动启动的压力区间0.6~0.7 MPa之间时,可能导致意外刹车。
吊环偏摆角度信号获取或传输采用电池供电时,需要设计为低功耗系统[20],以提高一次充电后持续正常工作时间,并具备低电压报警功能,防止由于低电或无电情况下无法工作,甚至发生意外碰撞。
车装修井机二层台采用吊绳结构,工作位置容易受到风载荷、立根偏置的影响,预设位置的铁架工机械手需要有较大卡持范围,或者配置VI系统自动调整机械手工作位置与工作行程,才能准确抓取或释放相应管杆。
自动修井作业程序的设定需要把风速等级与作业许可相结合,例如风速大于6级时,不能进行井架起升。
应急“三停”指单个设备停机、多个设备联动停机、切断系统动力总停机,即“单停、联停、总停”三模式,单个设备急停不能影响其它设备的使用。设备联锁控制应基于设备保护、人员保护、作业保护的“三保护”机制。
3 发展方向展望
3.1 从深井走向特深井
“双鱼001-H6井”深9 010 m,“跃进3-3XC井”深9 432 m,“深地塔科1井”突破万米,标志着我国钻井深度实现新的突破。随着油气田特深井的出现,超出现有标准界定的特深井修井装备成为必然。
3.2 从高能耗走向绿色节能
1) 新能源修井机成为主要发展方向。
按照国家积极培育新兴产业和未来产业的规划,伴随各大油田电网持续升级,储能电池技术快速发展,电池容量加大、充电时间缩短及使用寿命延长,陆地油田专用全电驱车辆里程焦虑将逐步得到解决,大吨位油电双驱修井机也将得到进一步发展。综合利用“源、网、荷、储”一体化精细化用能技术,通过变配电设备标准化、设备错峰用电、“削峰填谷”、发电机组余电利用、作业势能回收等措施,优化油气田生产,降低修井作业成本。
未来随着“制、储、运、用”氢能技术逐步走向成熟,涉氢关键材料性能成熟稳定,氢泄漏、氢脆、氢爆炸等安全隐患得以解决,氢能源发动机、氢燃料电池在修井机上应用将成为可能。
2) 环保修井机倍受关注。
一方面减少修井机用油设备,设备以电代油,采用太阳能等措施,减少碳排放量。另一方面对污油、污水、污泥等进行自动收集和集中处理,采用泥浆不落地设备等,实现修井机污染物零排放。
3) 静音修井机值得期待。
新一代静音修井机可通过采用隔离降噪、吸音技术、低冲击或无冲击结构等措施,将修井机总体噪音控制在65 dB以下。
3.3 从自动化走向智能化
AI、VI、大数据、物联网等技术发展助力修井作业走向井口智能化、无人化。
采用数字孪生技术,司钻台和远程控制台实时显示各设备的仿真运行状态,为修井作业提供实时安全监控与作业指导。
通过智能化控制系统,不同设备执行并行与串行相结合的有序高效混动模式,从单一性顺序式流程化作业走向系统性协同式流程化作业,保证安全的同时,提高作业效率。
修井机操控可实现“手、自、遥”多元控制,即手动控制、自动控制与远程无线控制,且具备人脸识别、语音交换功能,实现多元化人机交互环境。
未来修井机控制系统能处理复杂的修井工况,针对不同修井工艺建立不同的修井机自动化控制程序,并逐步具备复杂工况下的学习、记忆,自主判断、决策与执行功能。从小修修井作业完全自动化,逐步过渡到大修修井作业完全自动化;从分布式多个一键操作走向全流程一键操作。
4 结束语
随着我国科学技术的进步,修井机朝着高端、绿色、智能方向发展,且关键部件及元器件国产化成为未来发展的方向。建议瞄准深层、极地、海洋、非常规等油气钻采方向,增强政府、生产厂家、大学、研究院所和用户之间的合作,强化基础技术和基础材料的研究,加大创新投入,加快实现修井装备数字化设计、智能制造、自动化操控和信息化管理,为保障国家能源安全提供高精装备支持,也为开拓修井机国外市场打下更加坚实的基础。
参考文献:
[1] 高胜,庞伶伶,常玉连,等.修井井口机械自动化技术现状分析与展望[J].石油机械, 2012,40(2):80-85.
[2] 张喜庆,沈君芳,牟忠良,等.油田修井作业自动化装备研制[J].石油矿场机械, 2015,44(9):64-67.
[3] 缪明才,郭子江,范新冉.修井作业自动化技术现状及胜利油田的创新[J].石油矿场机械,2019,48(3):68-73.
[4] 孟森林.自动化修井机现状及发展趋势[J].石化技术,2019(7):4-5.
[5] 杜明贤,张志伟,张强,等. 液压自动排管架研制与应用[J].石油矿场机械,2021,50(2):83-85.
[6] 吴昌亮,方太安,周志雄,等. 多适应性管杆自动化上下钻台装置设计研究[J].石油矿场机械,2020,49(1):27-31.
[7] 周扬理,岳吉祥,綦耀光,等.修井作业立式翻转猫道受力特性研究[J].石油矿场机械,2021,50(2):49-53.
[8] 唐倩雯,付增,魏斌,等.机械化修井作业油管扶正装置的研制[J].石油机械, 2016,44(1):88-91.
[9] 符仁杰,郭登明,张建军,等.折叠式油管扶正机械手的设计与分析[J].石油机械, 2022,50(2):74-79.
[10] 耿玉广,谷全福,王建伟,等.小修作业起下油管多功能机械手研制[J].石油矿场机械, 2016,45(12):66-70.
[11] 关春丽. 修井用钻台机械手设计与仿真[J].石油矿场机械,2023,52(6):47-53.
[12] 张雷. 油管输送装置空间运动轨迹优化设计[J].钻采工艺,2017,40(2):71-73.
[13] 李洪波,王洪川,赵磊,等.伸缩臂式铁钻工的研制[J].石油机械,2014,42(11):16-19.
[14] 陈淼,郭登明,付青威,等.伸缩式自动化井口上卸装置的设计与分析[J].钻采工艺,2024,47(1):138-143.
[15] 蒋壮强,崔凯,张勇,等.井架排管机器人研制[J].石油矿场机械,2015,44(12):55-58.
[16] 南阳二机石油装备集团股份有限公司.小型石油修井机自动化作业控制系统V1.0[CP].2021-09-15.
[17] 南阳二机石油装备集团股份有限公司.二机自动化修井机嵌入式控制系统V1.0[CP].2024-05-07.
[18] 崔成.浅谈我国陆地石油修井机发展趋势[J].清洗世界,2020,36(10):112-113.
[19] 李铁亮.电动修井机产品分析及展望[J].设备管理与维修,2019(23)24-25.
[20] 钟剑,马骁,宫玉鸣,等.智能顶驱防碰装置低功耗系统设计与应用[J].钻采工艺,2023,46(4):121-124.
(编辑:韩睿超)
猜你喜欢
军事文摘(2022年19期)2022-10-18 02:41:14
印刷工业(2020年4期)2020-10-27 02:45:52
中国交通信息化(2017年4期)2017-06-06 07:21:52
中国科技博览(2016年18期)2016-10-19 08:22:11
中国科技博览(2016年18期)2016-10-19 07:01:13
中国市场(2016年36期)2016-10-19 03:40:15
现代园艺(2016年17期)2016-10-17 06:54:29
考试周刊(2016年77期)2016-10-09 12:37:53
科技视界(2016年20期)2016-09-29 14:13:02
科技视界(2016年20期)2016-09-29 13:45:10