基于CycleGAN网络的高频地波雷达海洋回波去噪研究
2025-02-08 00:00:00周浩李炳阳
现代电子技术 2025年3期

摘" 要: 高频地波雷达在对海面进行监控和目标跟踪时,必定会受到海杂波及各种噪声的干扰,这些噪声的存在是对船只目标检测的一个重大挑战。为了克服此难题,文中采用循环一致性产生式对抗网络(CycleGAN)对高频地波雷达图像进行降噪处理。在该方法中,将传统的杂波抑制问题转化为杂波抑制前后距离多普勒频谱图像的转换问题。在此基础上,利用海上实验获得的高频雷达回波资料进行实验验证,并与其他组网进行量化比较。实验表明,CycleGAN网络可以有效地对高频雷达回波信号进行去噪处理,在保持目标的前提下,有效地消除了相关干扰。
关键词: 高频地波雷达; 图像去噪; 深度学习; 杂波抑制; 生成对抗网络; 距离多普勒
中图分类号: TN959.71⁃34" " " " " " " " " " " " 文献标识码: A" " " " " " " " " " " " 文章编号: 1004⁃373X(2025)03⁃0056⁃05
Research on CycleGAN network based denoising of high⁃frequency
ground wave radar ocean echo
ZHOU Hao, LI Bingyang
(School of Electronic Information, Wuhan University, Wuhan 430072, China)
Abstract: High⁃frequency ground wave radar is inevitably affected by sea clutter and various noises when monitoring and tracking the sea surface, which poses a significant challenge to ship target detection. In this paper, a cyclic consensus generative adversarial network (CycleGAN) is used to denoise high⁃frequency ground wave radar images, so as to overcome the difficulties. In this method, the traditional clutter suppression problem is transformed into the conversion problem of Range⁃Doppler (RD) spectrum images before and after clutter suppression. On this basis, high⁃frequency radar echo data obtained from sea trials are used for experimental verification. In addition, quantitative comparison with other networking methods are carried out. Experiments have shown that the CycleGAN network can denoise high⁃frequency radar echo signals and eliminate related interference effectively while maintaining the target intact.
Keywords: high⁃frequency ground wave radar; image denoising; deep learning; clutter suppression; GAN; RD
0" 引" 言
高频地波雷达几十年来在海洋超视距遥感和船舶目标检测与跟踪方面取得了巨大成功[1],小型天线阵列被广泛使用,以节省宝贵的海岸线资源和成本,便于安装和维护。在海面目标的检测和跟踪过程中,高频雷达常常会受到各种杂波和噪声的干扰,尤其是海杂波的干扰,这些干扰可能会影响高频雷达对目标的准确检测。近年来,文献[2]提出基于小波的方法来抑制海杂波,并在距离多普勒(Range Doppler, RD)图上实现目标和杂波的分离,但母小波和重建系数往往难以选择。尽管可以提高SNR,但这种方法不能确保获得最佳分离,并且可能更难进行目标检测。文献[3]归纳了主成分分析(Principal Component Analysis, PCA)与小波分析相融合的方式,旨在提升雷达RD谱的辨识度,并有效压制噪声。其信噪比得到了提高,但方法的缺点仍然存在,因为小波系数的选择主要是根据经验。对此开发了一种基于离散小波变换(DWT)的HFSWR船舶自动检测方法[4]。DWT的最佳尺度由峰值SNR确定,以提取目标,然后,通过Ostu算法[5]标记分割区域来计算目标数量,但没有给出提取的点目标在多大程度上是真实目标的概率信息。
由于深度学习在雷达领域越来越受到关注[6⁃7],文献[8]采用前馈去噪卷积神经网络去除带噪图像中的噪声。利用深度学习技术对高频雷达进行去噪处理的研究也逐渐兴起,文献[9]提出改进灰狼优化算法的径向基函数神经网络,然而,由于高频雷达的特殊成像机制,用于训练的数据数量有限,RD谱图中的目标特征模糊不清,阻碍了深度学习在雷达杂波抑制领域的研究。循环一致性对抗网络(CycleGAN)作为对抗性网络的进阶形态,在文献[10]中被初次提及,并且仅需使用较小规模的数据集为所面对的难题提供了相应的解决办法。CycleGAN采用了对抗性训练的思想,使生成的图像尽可能与预期图像相似。因此,文中提出基于CycleGAN网络的高频地波雷达海洋回波去噪研究,以到达减少噪声干扰的目的。
1" 模型构建
1.1" 循环生成对抗网络
继文献[10]提出CycleGAN网络之后,该技术在人工智能深度学习这一行业中取得了显著成就,并且已经被广泛地应用并深入研究于多个科学领域。本文受其影响,运用了CycleGAN网络所展现的出色图像域迁移能力,进而将常规的高频地波雷达背景噪声的抑制问题转换成了距离多普勒谱图在杂波抑制前后的图像转换问题。
生成对抗网络结构如图1所示,CycleGAN包括2个生成器模型([F]与[G])以及2个判别器模型([DX]和[DY])。CycleGAN的训练目标在于掌握从[X]到[Y]中数据特征的转化,从而实现图片在不同域间的迁移[11]。在此结构中,生成器扮演了转换器的角色,[F]模型将源域图片转化为拥有类似[Y]域特质的图像,也就是通过学习两领域数据特征间的对应关系来将输入的[x(x∈X)]图像变换为与目标域[Y]具备近似属性分布的图像[x],即[x=FX→Yx]。同理,[G]模型也可进行相反的变换,即将[Y]域的图片转变为与[X]域分布类似的图像[y],即[y=GY→Xy]。辨别器的职责是鉴别加工前的真实图像与生成器输出的模拟图像,[DX]的任务是分辨实际的[x]图像与生成的[x]图像,而[DY]用于辨识实际的[y]图像与生成的[y]图像[12]。
CycleGAN模型同样涵盖了特有的损失部分,它的核心要素主要涉及生成对抗损失与循环一致性损失两方面。在对该深度学习网络进行训练的过程中,不断地迭代和优化步骤,其根本目标在于:改进这两种损失函数的表现,从而期望能够通过生成网络制作出高度逼真的图像输出来混淆判别网络;而判别网络则是提高其识别能力,更准确地鉴别输入的图像是否由生成网络仿造出来。
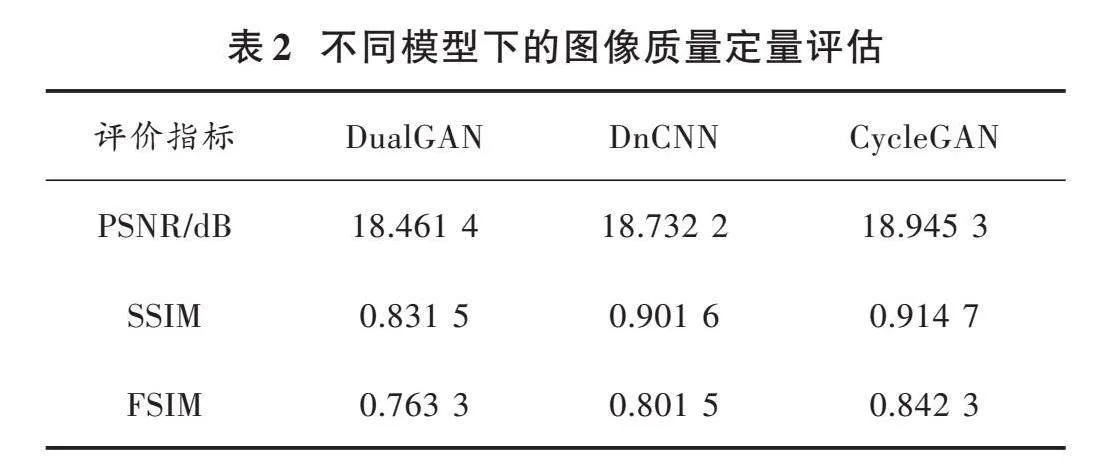
生成器[F]与判别器[DY]间的生成对抗损失函数如下:
[LGANFX→Y,DY=Ey~PdataylogDYy+Ex~Pdataxlog1-DYFX→Yx] (1)
式中:[Pdatax]和[Pdatay]分别为[x]和[y]的分布;[E]为期望。
但是如果只有单一的生成器[F]与判别器[DY],那么它们之间的生成对抗损失没有办法确保神经网络之中的输入图片[x]可以完全映射到期望输出[y]的分布之中。因此,类似的CycleGAN引入了生成器[G]与判别器[DX]之间的生成对抗损失函数:
[LGANGY→X,DX=Ex~PdataxlogDxy+Ey~Pdataylog1-DxGY→Xy] (2)
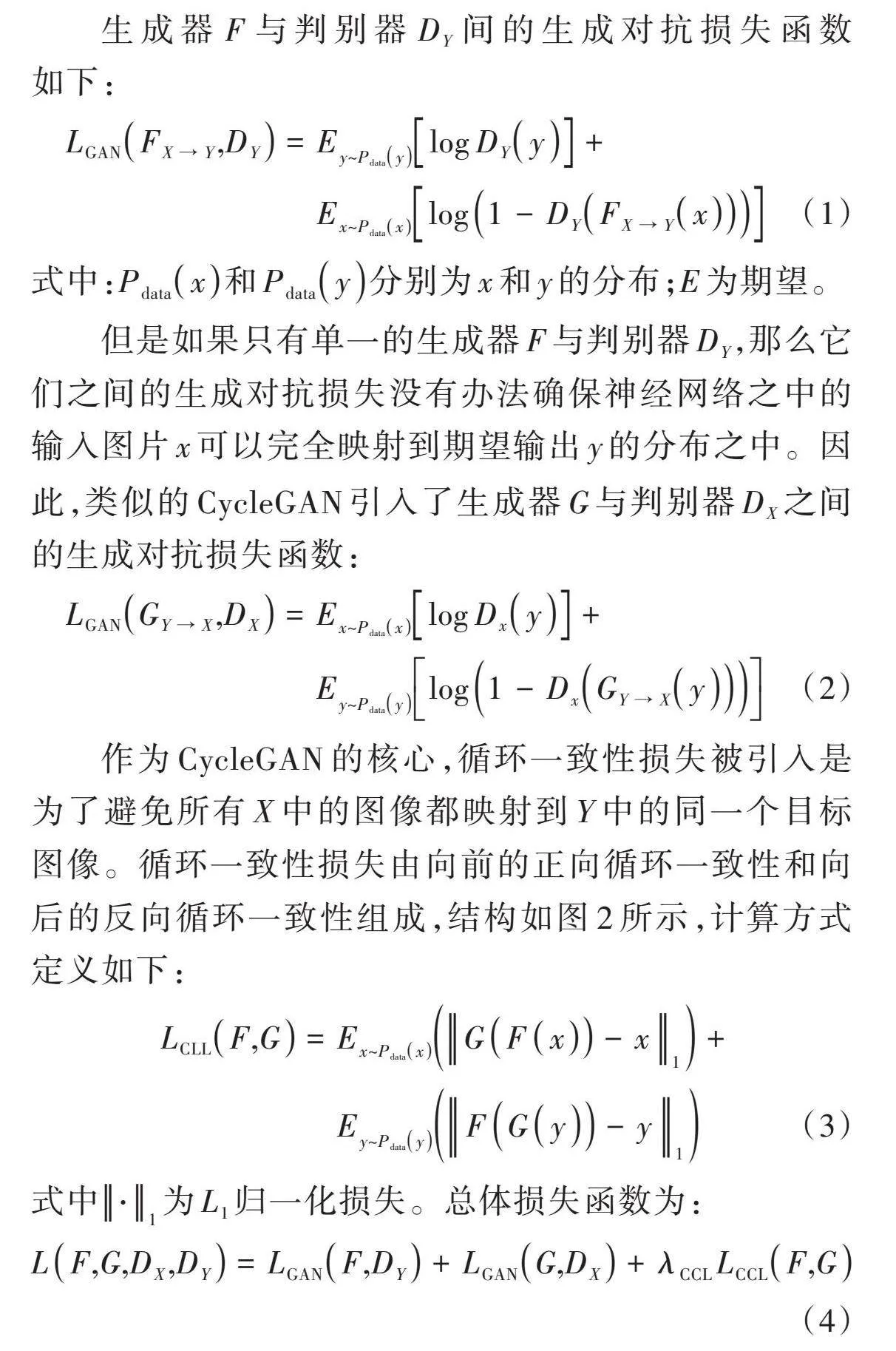
作为CycleGAN的核心,循环一致性损失被引入是为了避免所有[X]中的图像都映射到[Y]中的同一个目标图像。循环一致性损失由向前的正向循环一致性和向后的反向循环一致性组成,结构如图2所示,计算方式定义如下:
[LCLLF,G=Ex~PdataxGFx-x1+Ey~PdatayFGy-y1]" (3)
式中[⋅1]为[L1]归一化损失。总体损失函数为:
[LF,G,DX,DY=LGANF,DY+LGANG,DX+λCCLLCCLF,G]
(4)
1.2" 海洋回波谱的去噪模型搭建与训练
1.2.1" 数据集的准备
首先,利用海上实验资料提取出雷达的多普勒频谱,然后将多普勒信号转换成灰度图象,然后利用AIS的资料,并通过手动处理得到上述的带噪灰阶图像所对应的干净灰度图像,由此就构成了CycleGAN网络需要输入的数据集。
1.2.2" 网络的搭建
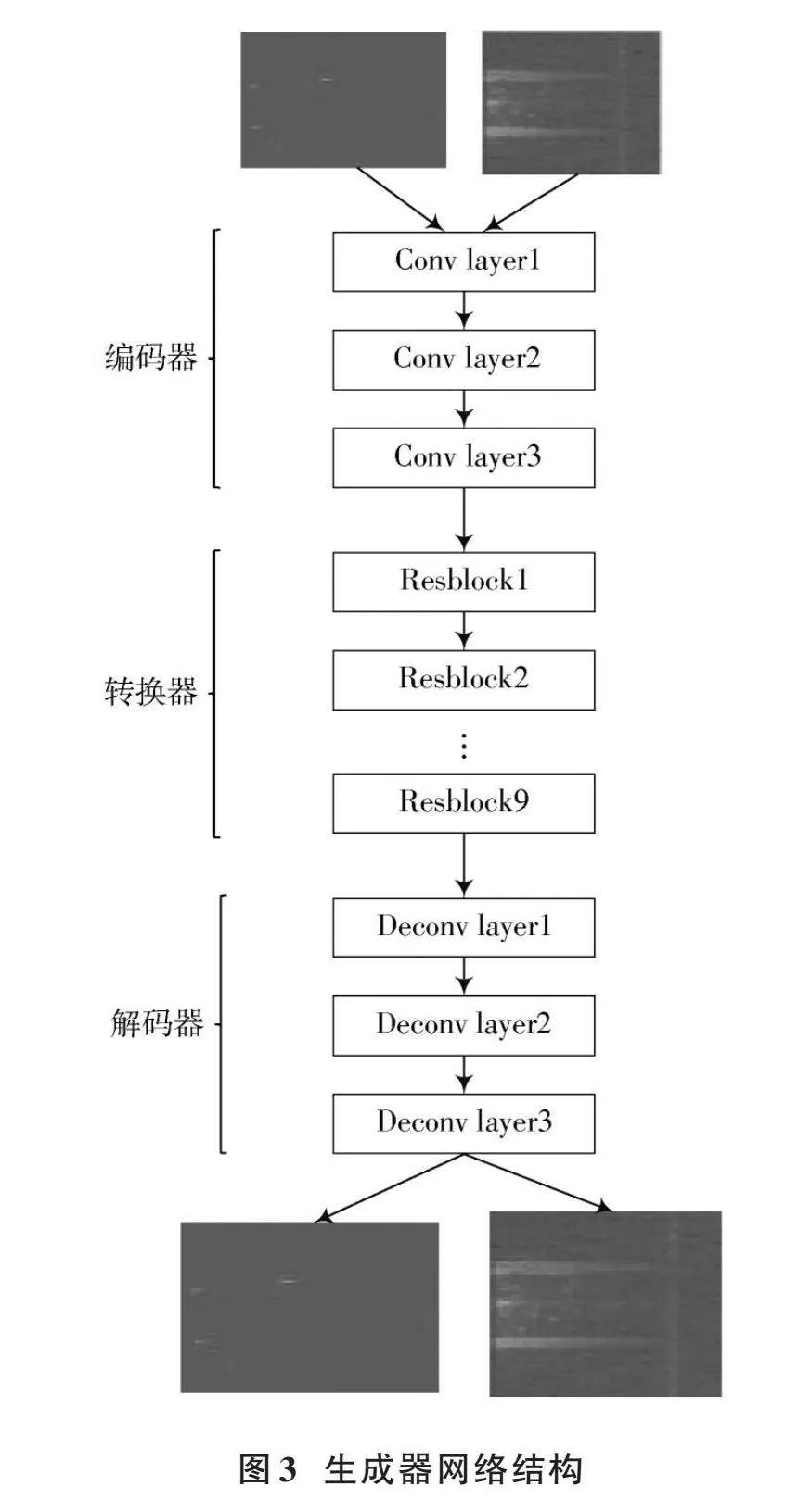
生成器网络结构如图3所示,CycleGAN网络从输入到输出分别是:编码器、转换器和解码器。
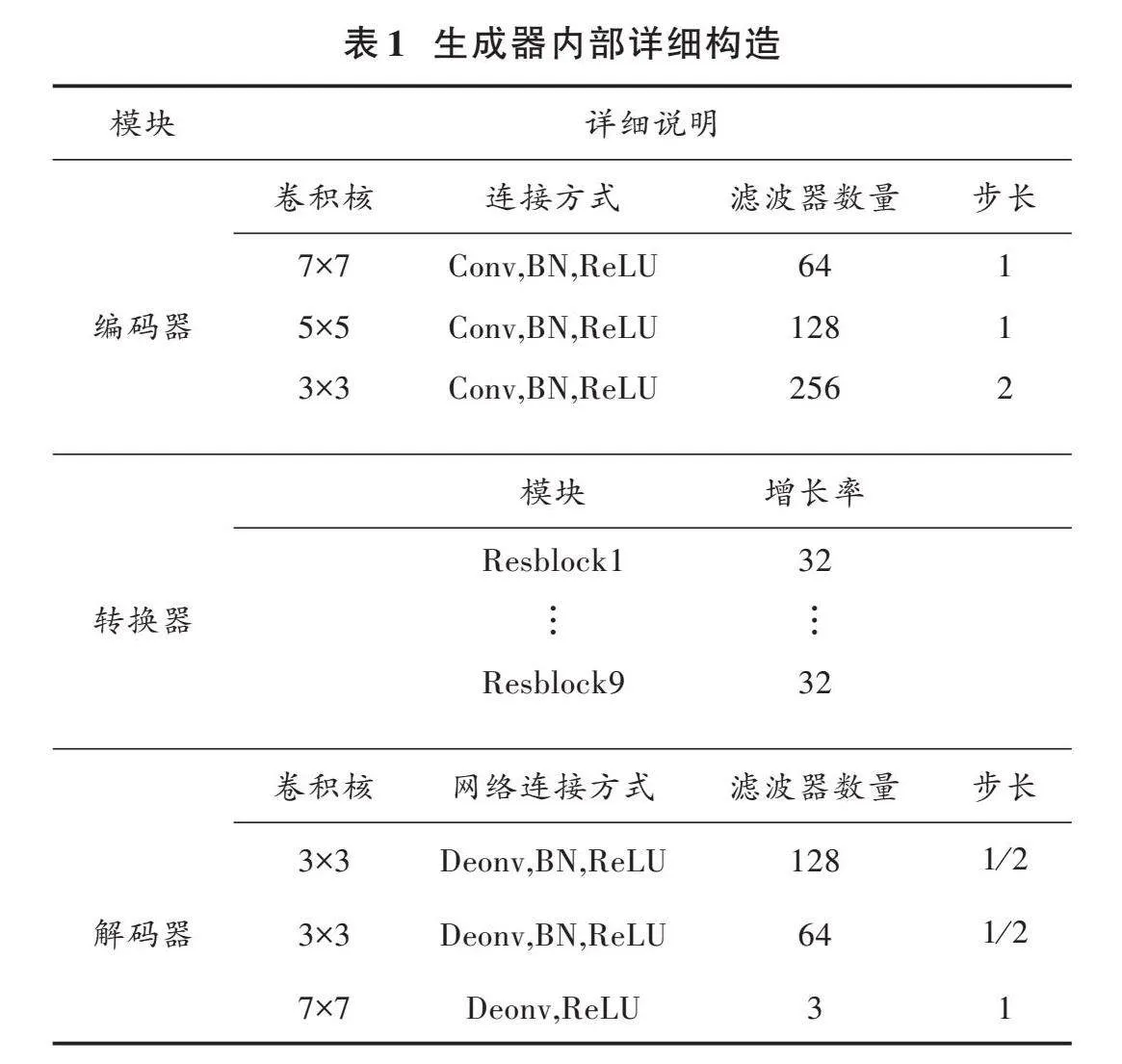
在最开始,图像资料输入至生成器中,并首先被导引至编码器以供处理。该编码器致力于对图像资料进行编码,以提取图像中雷达RD频谱的基本特征。在此过程中,编码模型利用带有三重过滤功能的卷积对图像进行逐步下采样,获取关键特征信息。本文中,提供给生成器的雷达RD频谱图的分辨率被统一设为256 Pixel×256 Pixel。第一个卷积层特别选用了Conv⁃BN⁃ReLU的组合方式,64个滤波器单元,卷积核大小为7×7,并且步进间距定为1,经过精练的特征向量由此层层传递至下一环节。遵循相似的处理逻辑,将每个卷积层同样按此方法不断深化对RD频谱图像特征进行挖掘。因此,在第3个卷积层的编码器最终提取出的结果是由256个大小为64×64的特征向量构成的组合。
转化器通过采用9个残差单元(Resblocks)过滤掉不必要特性,加强有用特性的结合,并借助过滤波的特性明确如何实现将输入图片的特征向量从去除噪声前(或去除噪声后)的状态,转化到去除噪声后(或去除噪声前)的状态。
最后对解码器进行连续的向上采样运算,以在提取特征中进一步地还原出相应的输入信号。解码器通过在两个向上的卷积网络层中逐渐还原图像的粗略特性,并在最后一个卷积层中把特征向量的输入通道数量压缩为3,从而可以对应输入图像中的像素通道数量,这样才能完整地完成对输入图像的重新构建。生成器的详细内部构造如表1所示。
1.2.3" 性能评估
在本次实验中,对实验结果性能的评估将由3个指标完成,分别是:结构相似度(Structural Similarity, SSIM)、峰值信噪比(Peak Signal⁃to⁃Noise Ratio, PSNR)以及特征相似度(Feature Similarity, FSIM)。峰值信噪比(PSNR)通过比较参照图像与生成图像间的均方误差来定量图片质量损失。峰值信噪比较高说明创建出的图像具有较小的失真度,图像质量较高。SSIM可对两张图像之间的相似程度进行评估,其取值在0~1之间,值越高说明两张图像越相似。FSIM的第一特征选取相位的一致性可对图像质量的好坏进行判别,其取值在0~1之间。越高的FSIM值,意味着两张图像之间特征的相似程度也就越高,从而产生图像的质量会更好。
2" 实验验证
2.1" 数据来源与预处理
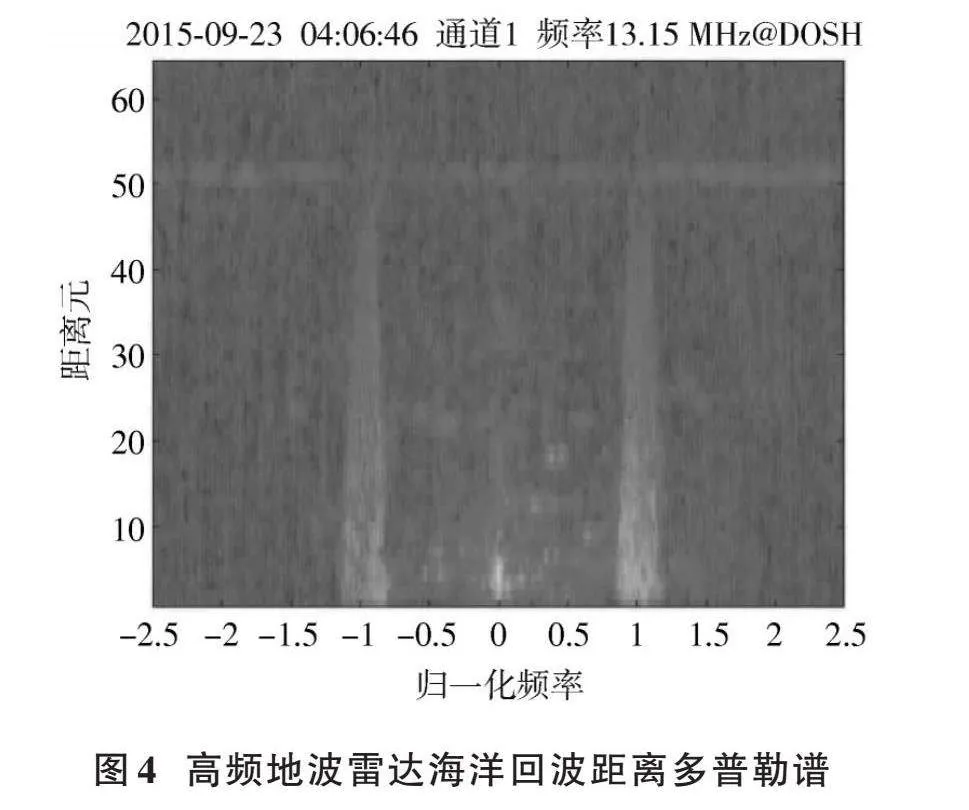
武汉大学雷达与信号处理实验室2015年在福建省东山进行海试实验,本文采用的是东山站雷达回波数据,雷达天线采用单极子交叉环结构,频率为13.15 MHz。
图4中展示的是海试中东山站获取的一张回波距离多普勒图。正负一阶峰附近展宽的区域为海杂波区域,即为想去除的噪声区域,它的范围大小与时间、浪高等海面多种因素有关。
从海试数据中得到的雷达距离多普勒图是一个二维数组,因此,要把这个二维数组转化为灰度图像,作为原始带噪声的图像数据。由于CycleGAN网络输入是以成对的方式进行,因此还要输入其对应的干净图像。
干净图像按以下方法生成。
1) 将原始的带噪图像作为基准,生成一个单一灰度值、相同尺寸的背景图像。
2) 人工结合船舶AIS信息,将原始的带噪图像中的目标信息以标签的方式进行保存。
3) 根据标签信息在干净背景的灰度图中设置标签船只目标信息。综上生成的干净图像就与原来带噪图像形成一一对应关系,这样构成的图像对就是数据集的组成元素。
2.2" 实验结果
本次实验使用的深度学习框架为TensorFlow 1.3,使用的计算机语言为Python 3及Matlab。计算机配置如下:GeForce RTX 3060显卡,处理器为i7⁃11800H处理器,内存大小为16 GB。对网络训练的基本设定为:每个批次大小128,epoch大小为100,总样本数量为512。
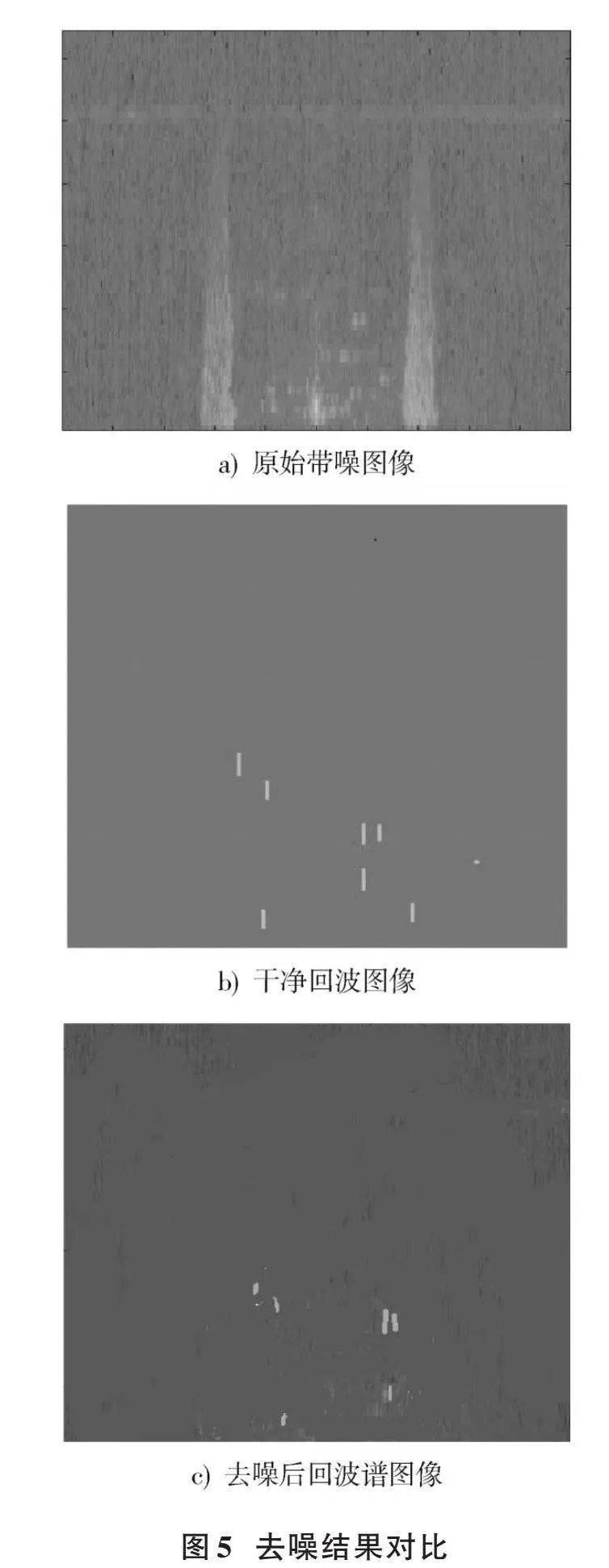
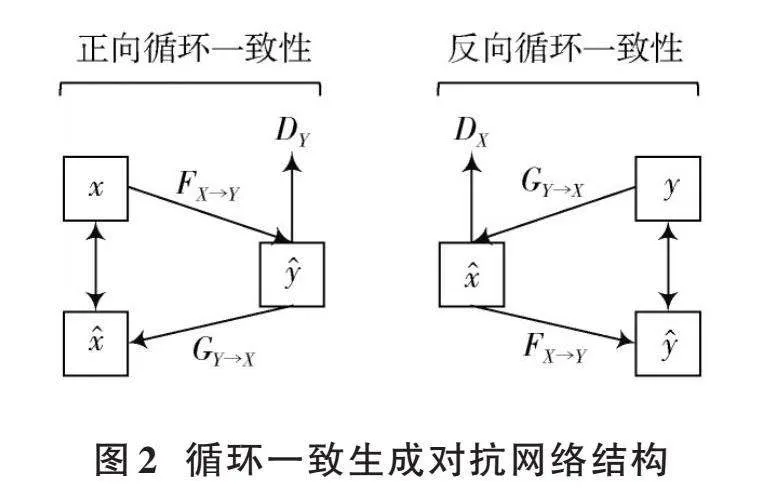
首先,在此基础上,利用CycleGAN网络对原始多普勒频谱进行可视化处理,并将其与传统的多普勒图进行对比,观察两者之间的直接关系。去噪结果如图5所示,经过CycleGAN网络滤波,消除了多普勒信号中的大多数干扰,同时保持了物体的本质特性;其次,通过量化分析,选取PSNR、SSIM、FSIM等性能,评估CycleGAN网络对多普勒成像降噪的影响。引入原始的GAN网络与效果较好的图像去噪网络DnCNN进行性能对比,整个实验的统计结果如表2所示。
3" 结" 论
由于高频地波雷达海洋回波谱中有着大量复杂的干扰,对这些噪声进行去除有很大困难。本文拟采用CycleGAN网络对雷达回波信号进行消噪建模,并利用高频地波雷达海试实验获得的多普勒频谱数据对其进行降噪处理。实验结果表明,该方法能有效地去除雷达多普勒成像中的噪声。
本文拟建立的CycleGAN网络去噪模型,通过消除多普勒信号中的噪音,实现对回波信号的压制,改善其资料质量,提升其探测能力,为海面船舶目标的识别提供了有力支撑,并进一步完善模型,使之适用于更广阔的海域。
参考文献
[1] VIVONE G, BRACA P, HORSTMANN J. Knowledge⁃based multitarget ship tracking for HF surface wave radar systems [J]. IEEE transactions on geoscience and remote sensing, 2015, 53(7): 3931⁃3949.
[2] JANGAL F, SAILLANT S, HELIER M. Wavelet contribution to remote sensing of the sea and target detection for a high⁃frequency surface wave radar [J]. IEEE geoscience and remote sensing letters, 2008, 5(3): 552⁃556.
[3] LU B, WEN B Y, TIAN Y W, et al. A vessel detection method using compact⁃array HF radar [J]. IEEE geoscience and remote sensing letters, 2017, 14(11): 2017⁃2021.
[4] LI Q Z, ZHANG W D, LI M, et al. Automatic detection of ship targets based on wavelet transform for HF surface wavelet radar [J]. IEEE geoscience and remote sensing letters, 2017, 14(5): 714⁃718.
[5] JIAO S H, LI X G, LU X. An improved Ostu method for image segmentation [C]// 2006 8th International Conference on Signal Processing. [S.l.: s.n.], 2006: 966⁃969.
[6] GENG J, FAN J C, WANG H Y. High⁃resolution SAR image classification via deep convolutional autoencoders [J]. IEEE geoscience and remote sensing letters, 2015, 12(11): 2351⁃2355.
[7] PLANINSIC P, GLEICH D. Temporal change detection in SAR images using log cumulants and stacked autoencoder [J]. IEEE geoscience and remote sensing letters, 2018, 15(2): 297⁃301.
[8] ZHANG K, ZUO W M, CHEN Y J, et al. Beyond a Gaussian denoiser: Residual learning of deep CNN for image denoising [J]. IEEE transactions on image processing, 2017, 26(7): 3142⁃3155.
[9] SHANG S, HE K N, WANG Z B, et al. Sea clutter suppression method of HFSWR based on RBF neural network model optimized by improved GWO algorithm [J]. Computational intelligence and neuroscience, 2020(1): 1⁃10.
[10] ZHU J Y, PARK T, ISOLA P, et al. Unpaired image⁃to⁃image translation using cycle⁃consistent adversarial networks [C]// IEEE International Conference on Computer Vision. New York: IEEE, 2017: 2242⁃2251.
[11] ZHAO J M, ZHANG J, LI Z, et al. DD⁃CycleGAN: Unpaired image dehazing via double⁃discriminator cycle⁃consistent generative adversarial network [J]. Engineering applications of artificial intelligence, 2019, 82: 263⁃271.
[12] 黄山,贾俊.基于改进循环生成式对抗网络的图像去雾方法[J].计算机工程,2022,48(12):218⁃223.
[13] GOODFELLOW I J, POUGET⁃ABADIE J, MIRZA M, et al. Generative adversarial nets [C]// Advances in Neural Information Processing Systems 27: Annual Conference on Neural Information Processing Systems 2014. [S.l.: s.n.], 2014: 2672⁃2680.
猜你喜欢
江苏教育·中学教学版(2016年11期)2016-12-21 11:36:29
现代情报(2016年10期)2016-12-15 11:50:53
新教育时代·教师版(2016年23期)2016-12-06 06:02:38
法制与社会(2016年32期)2016-12-01 15:25:53
电子技术与软件工程(2016年18期)2016-11-14 00:05:27
软件导刊(2016年9期)2016-11-07 22:20:49
软件工程(2016年8期)2016-10-25 15:47:34
电脑知识与技术(2016年14期)2016-06-30 19:49:04
电脑知识与技术(2016年8期)2016-05-19 13:47:24
湖北农业科学(2015年19期)2015-10-28 22:52:59