响应型柔性材料系统的向光性驱动
2025-01-22 00:00:00卢伟王叙宁侯国栋钱小石孟光
南京大学学报(自然科学版) 2025年1期
关键词:光响应材料,感知,驱动,自发负反馈
中图分类号:O439 文献标志码:A
为了应对自然界的生存挑战,植物在演化过程中形成向光生长的能力,从而维持自身能量需求[1-2]. 动物或微生物在生命活动中有选择地靠近或远离光源,被称为趋光运动[3-6]. 此类有趣的“向性”(Tropism)运动得益于生物体自身的方向性反馈机制,该机制实时地帮助生物体完成趋利避害的运动选择[7-9]. 受此启发,基于向光性与趋光性的人工机电控制系统得到关注,例如美国农业部新能源乡村发展基金资助的自主追踪太阳能量的光伏系统,比传统的屋顶光伏系统占用的空间更小,但多产生40% 的发电量[10]. 类似的系统通常由光传感元件、电执行器、传动部件及相关电子控制系统组成,然而,基于机电设备的“向光性”系统必然依赖电子电路控制与算法. 伴随着巨大的体积、重量以及繁琐的维护需求,这类机电系统体现了人类对电子系统的熟练应用与依赖,将自然界的能量信号转化为电信号提供给中央处理器,并指导终端大功率设备的驱动. 相比之下,植物的向光生长不依赖“中央处理器”,而是将生长素的分泌梯度与温度梯度结合,实现“向光性驱动元件”的泛在分布、高能效与轻量化,在无须电能输入、电子电路控制与人工干预的情况下,实现复杂环境中的向光性驱动. 设计光响应材料系统实现不依赖电子电路与人工操作的向光性、趋光性作动,成为一个有趣的研究方向.
光响应柔性材料[11-12]是一种对电磁波高度敏感的功能材料,吸收电磁波能量后会大幅改变自身物理或化学性质,被广泛应用于传感[13-16]、药物递送[17-19]、软体机器人[20-22]等领域. 常见的光响应柔性材料有刺激响应型水凝胶[23-24]、液晶弹性体[25-27]、形状记忆聚合物[28-30]等. 光照下分子各向异性排列的液晶弹性体各向同性发生转变,伴随大幅度的可逆形变,在柔性驱动、光机械系统与软体机器人领域有广阔的应用前景[31]. 刺激响应型水凝胶可通过对分子链和结构的设计来调控其响应行为[32-34],并具备优异的生物相容性和鲁棒性,同样受到了广泛的关注. 然而,长期以来基于光响应材料的人工软材料驱动系统(软体机器人、微纳机器人等)的驱动方向仍常常依赖于光电设备与人工遥控,迄今为止,在人工合成材料中引入负反馈回路实现类似生物体的自我调节行为仍是一项重大挑战.
2012年,哈佛大学的Aizenberg 课题组[35]提出一种通用策略,在水凝胶中内置化学⁃机械化学反馈回路,成功制作出一种能够完成自调节、自供能的“恒温”材料系统. 研究人员将聚N⁃异丙基丙烯酰胺(Poly N⁃isopropylacrylamide,PNIPAM)水凝胶与柱顶部内嵌了催化剂的环氧树脂微阵列结合,并将其置于与水和有机溶剂分层的试剂中,利用PNIPAM 的最低共溶温度(Lower Critical So⁃lution Temperature,LCST)及催化剂与不同试剂的放热反应,促使微阵列反复穿透水⁃有机溶剂界面. 当温度过低时,PNIPAM膨胀促使环氧树脂微阵列与试剂发生放热反应,提高系统温度;当温度过高时,PNIPAM收缩,带动微阵列回到水环境,放热反应停止;系统对外漏热使温度降低至LCST 以下,PNIPAM膨胀并开启第二个循环.该系统类似温度PID (Proportion Integration Dif⁃ferentiation)控制器,针对设定温度循环回归. 这种自反馈循环控制的设计方法为向光性、趋光性软材料系统的研究提供了可类比的方案.
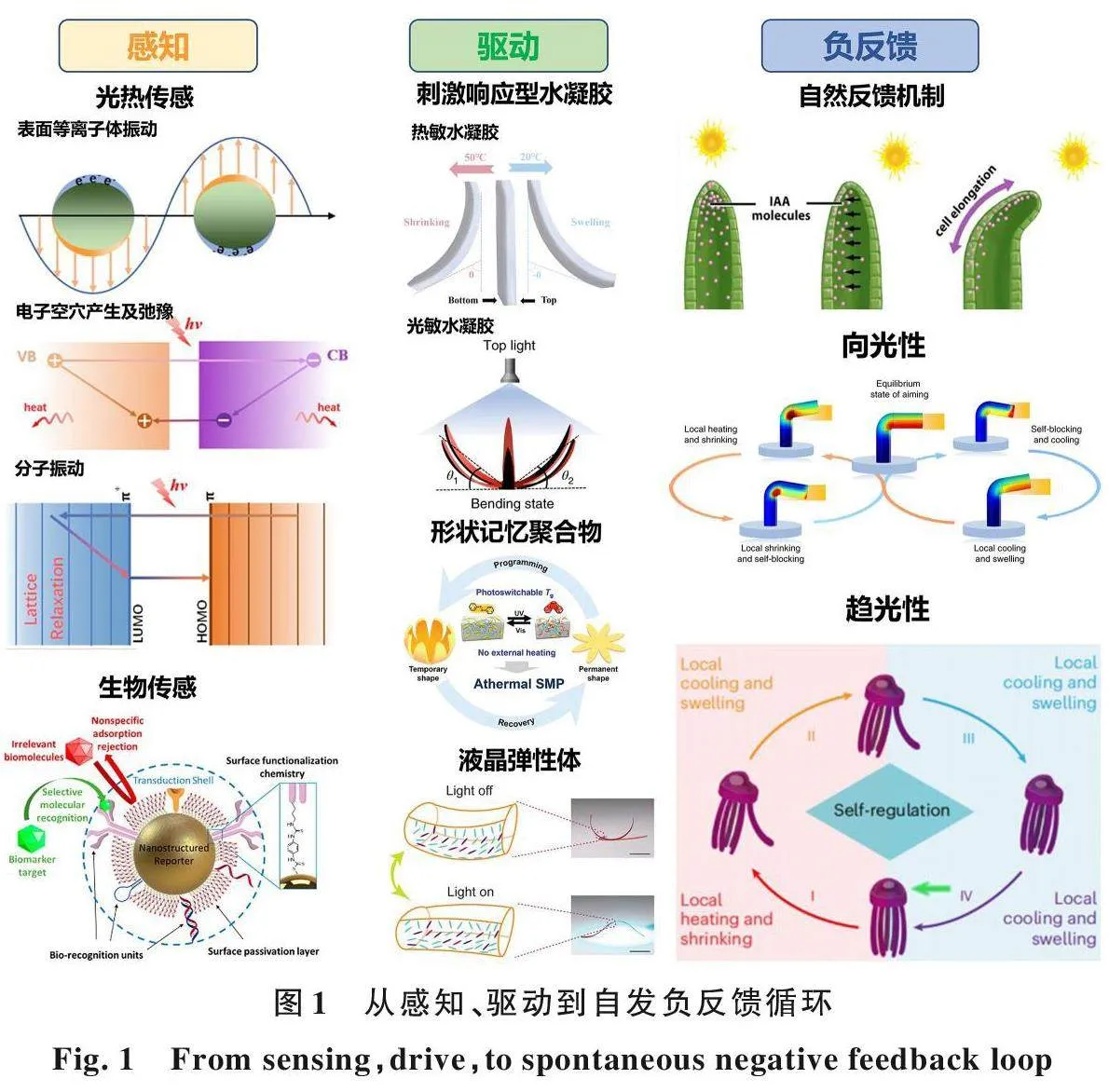
类似地,基于光响应柔性材料的人工作动器往往缺乏对于外界刺激方向的回归能力. 在光的刺激下,这些软驱动器的最终形态往往取决于势能与输入光信号的准静态平衡. 也就是说,当光强、偏振、波长等多维度光信号发生变化时,软驱动器的形态随之发生变化,难以实时对准光源甚至是追踪来光方向. 此外,由于光响应柔性材料往往对外界环境较为敏感,一旦发生改变就无法完成对准任务,常常出现对不准或驱动过度的情况. 类似PID温度控制,在智能材料中引入反馈回路能突破局部环境的干扰,将动态平衡的概念注入自主软器件的设计中,有望实现软材料系统的自主. 引入负反馈回路能极好地解决材料系统实时响应和驱动的难题,在一定程度上对不可预知的外界环境变化采取及时修正期望的行为. 如图1 所示,将人工“向光性”“趋光性”分解为“光感知”“光驱动”“负反馈”三个基本功能元素,本文基于水凝胶、液晶弹性体等光响应材料,总结概述了光响应材料系统的发展现状和未来方向,为自适应软驱动系统的研究提供思路和建议.
1 柔性材料的光感知
光的方向感知是响应型柔性材料实现向光性驱动的第一环节. 响应型柔性材料通常可以对外部环境刺激产生显著且可逆的反应,包括温度[36-39]、pH[40-41]、光照[42-43]、磁场[44-47]、机械压力[48-50]等因素的变化. 电磁波作为一种波动能量传播形式,具有多维度信息载体的能力,例如光波长(能量)、波矢(动量、方向性)、偏振、手性、强度等. 光响应柔性材料可以对电磁波蕴含的不同信息维度表现出不同的响应形式. 液晶弹性体通常会在光或热的刺激下产生宏观机械响应,例如Zeng et al[51]利用热能作为信息媒介,设计了根据光功率密度完成自我调节的人造虹膜弹性体,在最小瞳孔尺寸下,可将光透射率降低七倍,达到天然虹膜的标准. 偶氮苯基团是一种在特定波长光照下发生顺反异构转换的特殊化学结构,可作为重要的光波长信息载体. 不少研究人员将偶氮苯基团与光响应材料相结合,可传递多维度光学信息. 如Yu et al[52]将含有偶氮苯的液晶单体与双丙烯酸酯热聚合成薄膜,可在线偏振光照射下发生定向弯曲,完成波长与偏振信号的双重传递.然而,现有光学驱动传感的工作存在大小不一的痛点,如人工虹膜[51]与3D 打印的形状记忆薄膜[53]受限于光照方向,无法完成全方向驱动;偏振信号单一,无法完成全覆盖[54];人造液晶纤毛[55]在光热作用下温度是不可控的;向光驱动液晶材料[56]工作时角度受限等.
对于鲁棒的、稳定的向光性驱动,人们期待光响应材料仅仅对于电磁波的方向敏感,而对电磁波的其他信息不敏感. 例如,植物的向光性生长不依赖于某种特定的光波长、偏振态,也不存在明显的强度窗口. 因此,设计一种对电磁波方向信息具有特异性敏感的响应材料,这是实现柔性材料向光性驱动的第一项挑战. 一种最直接的方法是将光热转化材料与热敏柔性材料相结合,具体步骤如下.
(1)通过光热转化纳米材料将光信息转化为热信息,在光与材料系统相互作用的过程中,将光强梯度转化为温度梯度,从而仅保留梯度方向信息.
(2)利用热敏柔性材料的温度相变,结合材料内部保留的温度梯度信息,对材料系统的形态进行主动调整.
柔性高分子相变材料具备独特的物理与化学属性,包括形状记忆聚合物、水凝胶和液晶弹性体等,在受到外部刺激时,它们表现出显著的形态或性能变化,这类变化主要由特定条件下分子链内部或分子链之间的相互作用驱动触发,进而引发材料性能的转变. 形状记忆聚合物通过物理或化学交联的网络结构存储特定形状的“记忆”,在经历变形后,这些材料能在接受特定的外部刺激(如温度变化、光照、电磁场等)时恢复到其原始形状. 水凝胶具有特殊的三维网络结构,是一种特殊的聚合物材料. 在众多刺激响应水凝胶中,热敏水凝胶因其响应迅速、鲁棒性良好的特性而备受关注. 最典型的是PNIPAM,其体积变化是由外界温度波动引起相变导致的,通过加入吸光纳米粒子,可实现光对水凝胶的温度调控. 当外部温度高于水凝胶LCST 时,内部高分子链与水分子的氢键作用减弱,水凝胶呈现疏水状态,体积收缩;当温度低于LCST 时,水凝胶的高分子链和水分子的氢键作用增强,水凝胶呈现亲水状态,开始吸收外界环境中的水分子,体积溶胀. 该可逆过程同时伴随着光学性质的变化,包括折射率和透光度的改变,该特性使热敏水凝胶尤其适用于光学传感相关的应用. 液晶弹性体作为另一种柔性网络材料,它将液晶的自组装和各向异性与弹性体的橡胶弹性结合在一个系统中. 液晶弹性体的独特之处在于能在特定刺激下发生有序的结构变化,导致形状或光学性质的变化. 结合特定响应材料,液晶弹性体的响应性不限于温度,还可以是光照、电场等外部刺激,聚合物的机械特性、液晶和响应材料的刺激响应性使液晶弹性体被称为可用于各种应用的功能材料.
在上述材料中,相变的本质是温度诱导(如热敏水凝胶)、光诱导(通过特定波长的光照引发的变化)或电磁场诱导等,这些相变不仅影响材料的物理形态(如形状、体积),还会影响其光学、机械和热学性能,其中光热性能作为一条重要分支占据着高分子传感应用的重要地位. 光热材料[57-65]能吸收入射光,经由光激发将光能转化为热能,此类光热效应发生在各种各样的材料中,如等离子体金属[66-68]、半导体[69-72]、碳基材料[73-74]等. 典型的光热应用有太阳能蒸发技术[75]、光热取水[76]、光热催化[77]等,与之对应的光热机制[75]分为表面等离子体共振(Surface Plasmon Resonance,SPR)、电子空穴产生及弛豫和分子热振动三类.
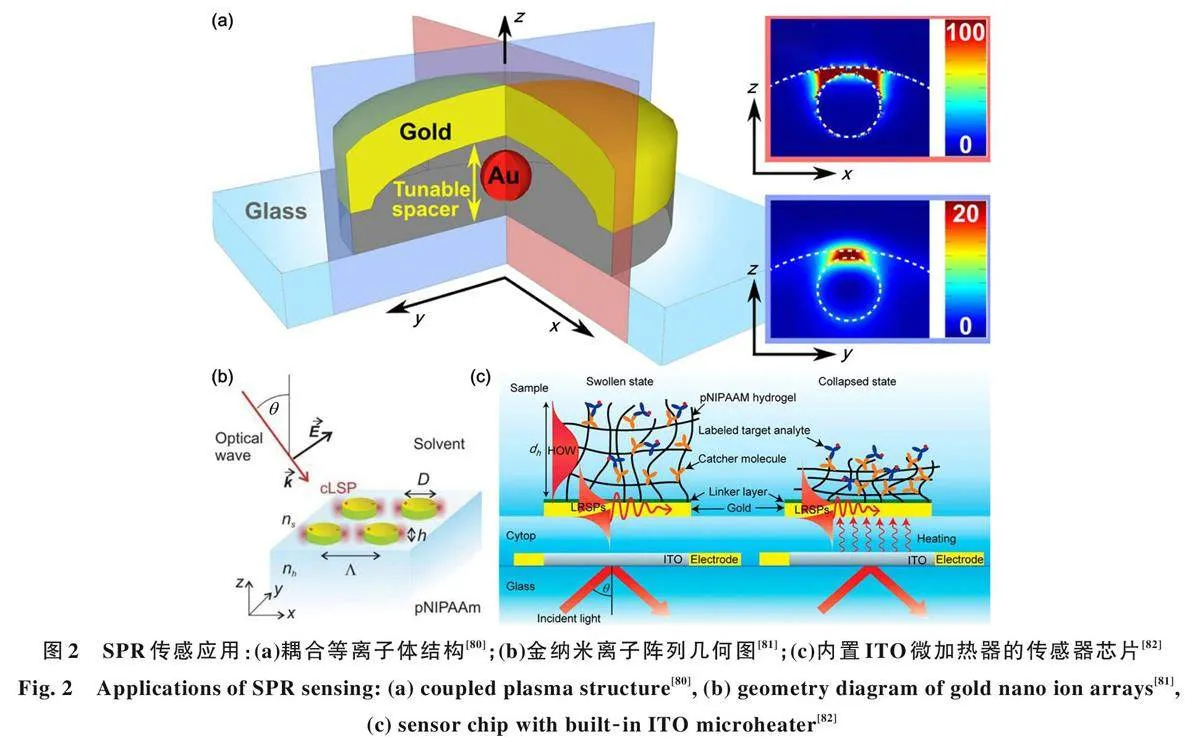
1. 1表面等离子体共振(SPR) 表面等离子体共振(SPR)是一种基于金属介质界面上电子共振现象的光学技术,具备广泛的应用场景. 常用于生物分子(如蛋白质)识别[78]、光波导、光栅耦合[79]等. 当特定波长的偏振光照射到金属(通常为金或银)薄膜表面时,入射光与金属表面集体振荡的自由电子相互作用,产生表面等离子体波. 这种共振现象高度敏感于金属表面附近介质的折射率变化,与热敏水凝胶光热响应下的折射率变化极为契合. 为了使水凝胶快速感知周围的温度变化,研究者通常将光热纳米材料与热敏水凝胶相结合,进而赋予复合水凝胶出色的光热转化能力. 耦合了金纳米粒子的复合水凝胶表面能产生强烈的表面等离子体共振,迅速将光能转变为热能,导致水凝胶局部温度骤升. 这种温度上升可以引发热敏相变水凝胶失水皱缩,从而带动机体运动,此时,热能成功转变为机械能. Brasse etal[80]利用PNIPAM 制作外壳,将金纳米颗粒封装其中,并在壳体上端覆盖一层金属膜,形成内部金纳米粒子与上端金属薄膜之间分离良好的等离子体结构(图2a),验证了耦合谐振的可调性. Gis⁃bert Quilis et al[81]基于PNIPAM 设计了另一种传感结构(图2b),具有主动协调能力以及极窄的吸收光谱特性. 水凝胶可逆地皱缩和膨胀,调节了上层金纳米颗粒的周期以及水凝胶层的折射率,局域表面等离子体(Localized Surface Plasmon"Resonance,LSP)引起的共振峰从而也被调节.另外,Toma et al[82]设计了一种底部嵌入氧化铟锡微加热器和顶部覆盖PNIPAM 薄膜的SPR 结构(图2c),该结构可应用于表面等离子体增强荧光生物传感的领域. 热敏水凝胶在变化温度下的可逆大幅形变使SPR 技术得到了充分发展,为软体驱动及人工向光提供了强力的技术支持.
1. 2电子空穴产生及弛豫 电子空穴的产生及弛豫涉及半导体材料[72,83,84]中电子的激发和回复过程. 在激发过程中,当半导体材料吸收光能(或其他形式的能量)时,价带中的电子可以获得足够的能量跃迁到导带,变成自由电子. 该过程在价带留下的缺失称为“空穴”,电子和空穴一起形成了电荷载体对. 弛豫是电子⁃空穴对重新结合的过程,电子从导带回到价带,释放出之前吸收的能量,这种能量释放可以是光的形式(如光致发光)或热的形式(非辐射复合).
1. 3分子热振动 分子振动传感是基于分子内部的振动模式,通常通过红外光谱或拉曼光谱来检测. 每种分子都有独特的振动频率,当分子吸收特定频率的光时,会导致其内部键的伸缩、弯曲或扭曲,引起能量状态的改变. 典型的有生物质碳[85]、石墨烯[86-93]、氧化还原石墨烯[94-100]、碳纳米管[76,101-103]、石墨[104-107]、炭黑[108]等,目前氧化还原石墨烯在光热水凝胶中已得到广泛应用[109-112].
光感知柔性材料的传感功能赋予光学系统无限的可能,在外部条件不断变化下,柔性材料的光传输特性(如强度、相位或偏振)可产生大小不一的影响,合理利用光源,通过编程、机械操纵、分子开关、生物传递等手段对该光响应特性加以利用,水凝胶等光响应材料可胜任众多高灵敏度的传感工作. 目前,光学传感在调节和操作方面仍然需要人为地大幅干预,在试验过程中往往耗费大量的时间,效率难以得到保证. 因此,未来在集成更多智能功能及系统的同时,也需要向自适应、自修复方向努力.
2 光响应材料的光学驱动应用
光学驱动[113]主要依赖于光与物质之间的相互作用,这种相互作用能导致电子激发、能量转移、化学键的断裂或形成以及物质的结构变化.物质通过吸收光能从光能转换为其他能量形式(如热能、化学能或机械能),来实现对物质的操控和控制. 典型的光响应驱动材料有刺激响应水凝胶、形状记忆聚合物和液晶弹性体等.
2. 1刺激响应水凝胶
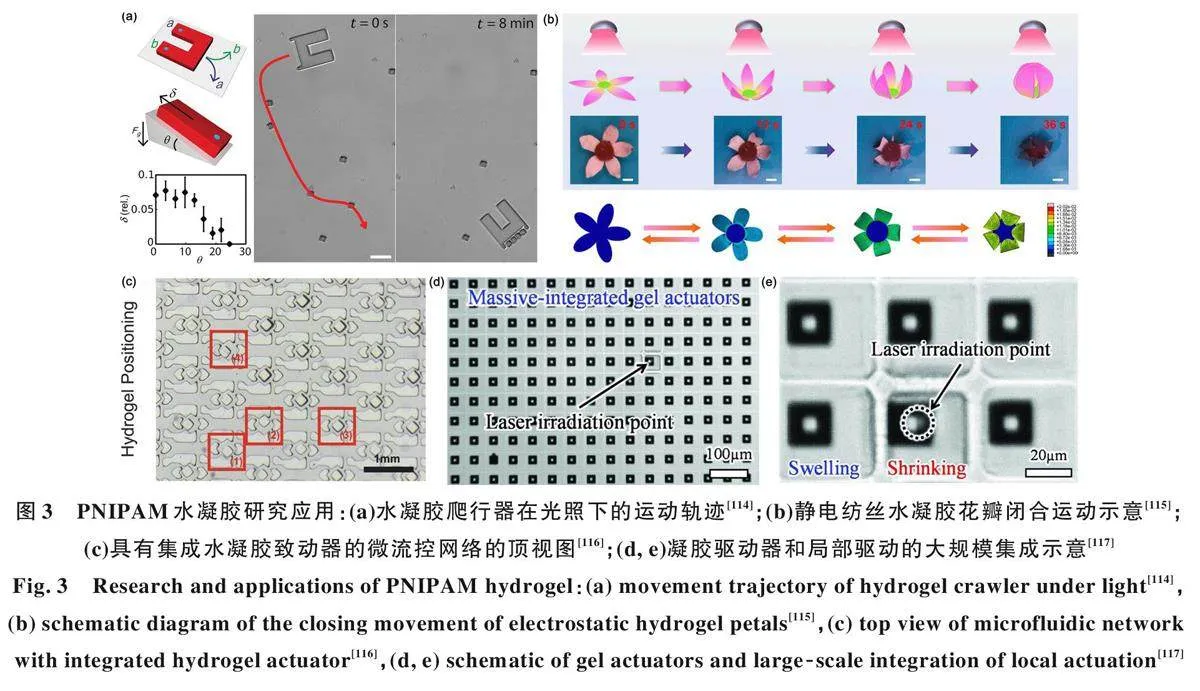
2. 1. 1PNIPAM水凝胶 PNIPAM 水凝胶的体积变化是由外界温度的波动引起的,通过加入光热组分(金/银纳米颗粒或氧化石墨烯等),可以实现光对水凝胶的温度调控. 当外部温度高于水凝胶LCST 时,内部高分子链与水分子的氢键作用减弱,水凝胶呈现疏水状态,体积收缩. 当外部温度低于LCST 时,水凝胶的高分子链和水分子的氢键作用增强,水凝胶呈现亲水状态,开始吸收外界环境中的水分子,体积溶胀. 反复利用可逆过程的体积变化驱动力,热敏水凝胶能达到出色的致动功能. 如Rehor et al[114]开发了一种微型(100μm)水凝胶爬行器,添加了金纳米颗粒的PNI⁃PAM 在激光加热时局部可逆收缩,水凝胶持续处于非平衡状态,反复膨胀收缩导致凝胶与基底之间的摩擦发生不对称变化. 利用摩擦迟滞产生的失衡,在激光控制下,爬行器可完成定向运动,如图3a 所示. 除了金纳米颗粒作为光热因子外,Wei et al[115]将静电纺丝技术融入水凝胶,在模拟花闭合的过程中实现了更高的拉伸强度,如图3b所示. 除了宏观驱动外,水凝胶也能用于制作大规模集成系统下的微驱动器. Haefner et al[116]用刺激响应水凝胶来制备高度集成电路,将微米级水凝胶精准安装在微流体网格表面上,如图3c 所示,通过微加热器控制水凝胶达到控制阀门的功能. Koike et al[117]用光照射微型水凝胶驱动片来实现局部温度调节,微驱动器由温度响应型水凝胶制成,并集成在具有光吸收微图案的微流体芯片上,如图3d 和3e 所示. 基于光热效应,光照射能提高芯片温度来实现致动,与传统微加热方式相比,光照射能实现局部加热且有效规避因局部散热不均而引起的意外驱动.
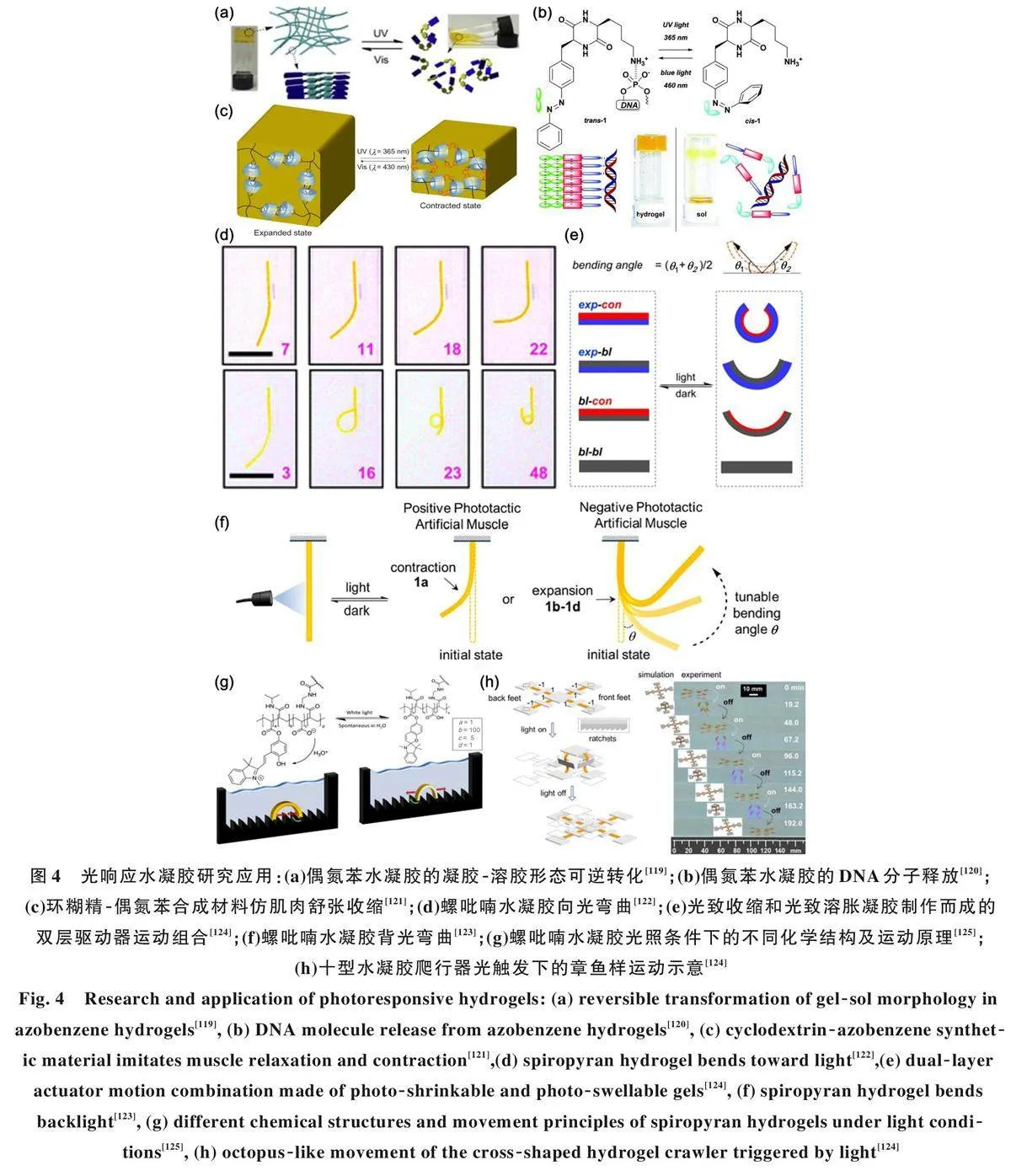
2. 1. 2偶氮苯/螺吡喃水凝胶 偶氮苯和螺吡喃是两种常见的光响应型分子,能在光照射下发生可逆的电子转移过程,通过分子变形重组实现宏观性能调控,由直接的光响应完成驱动,一般使用弱光照射[118]. 偶氮苯分子能在光照下发生从反式到顺式的可逆光化学异构化,通过分子结合与解离达到宏观调控,常用于相态转化、分子释放及人工肌肉等领域. 例如,Zheng et al[119]报道了一种可在紫外光与可见光交替照射下实现凝胶⁃溶胶可逆转化的偶氮苯聚合物(图4a),为智能软材料提供了新的创造思路. Pianowski et al[120]将自修复偶氮苯水凝胶应用于DNA 和阿霉素的释放图4b). Iwaso et al[121]将环糊精⁃偶氮苯合成材料应用于肌肉的舒张和收缩(图4c). 螺吡喃分子在紫外光照射下能从闭环形式转变为开环形式的异构体,而在可见光照射下可逆转回闭环形式.这种变化往往伴随分子极性显著的变化,多应用于光致动器. 例如,2011 年Satoh et al[122]将螺吡喃衍生物引入PNIPAM 来形成光致收缩水凝胶,实现了光诱导下的凝胶柱体向光弯曲(图4d). 2020 年,Li et al[123]开发了光致溶胀水凝胶,使得凝胶柱体能背光弯曲(图4f),并在后续工作中[124]将光致收缩和光致溶胀水凝胶相结合,制备了双层水凝胶致动器(图4e),在光照下能完成多种弯曲组合,并将倒刺结构引入水凝胶实现类章鱼的爬行运动(图4g),为光响应凝胶的仿生运动奠定了基础. 此外,Francis et al[125]合成了一种基于PNIPAM 的双足水凝胶行走器,该创意来源于蚯蚓依赖躯干肌肉伸缩完成爬行运动. 此聚合物结构中存在光致变色螺吡喃分子,在不同的光照条件下,水凝胶可在水环境中可逆地收缩和膨胀,将双足凝胶放置在充满水的棘轮表面上,棘轮表面设计成倒刺结构,双足凝胶可以在给定方向上完成一系列的行走运动(图4h). 此类仿生驱动工作证明了水凝胶应用于微机械臂的可能性,可推动小货物前行,在医学领域可用于药物定点释放、分子运输等. 在微驱动领域,ter Schiphorst etal[126]利用质子化硫氰和螺吡喃水凝胶同样完成了微流体通道的阀门制作. 这些工作为大规模集成系统的发展提供了重要思路,可用于高功能单细胞操作、精密加工等领域.
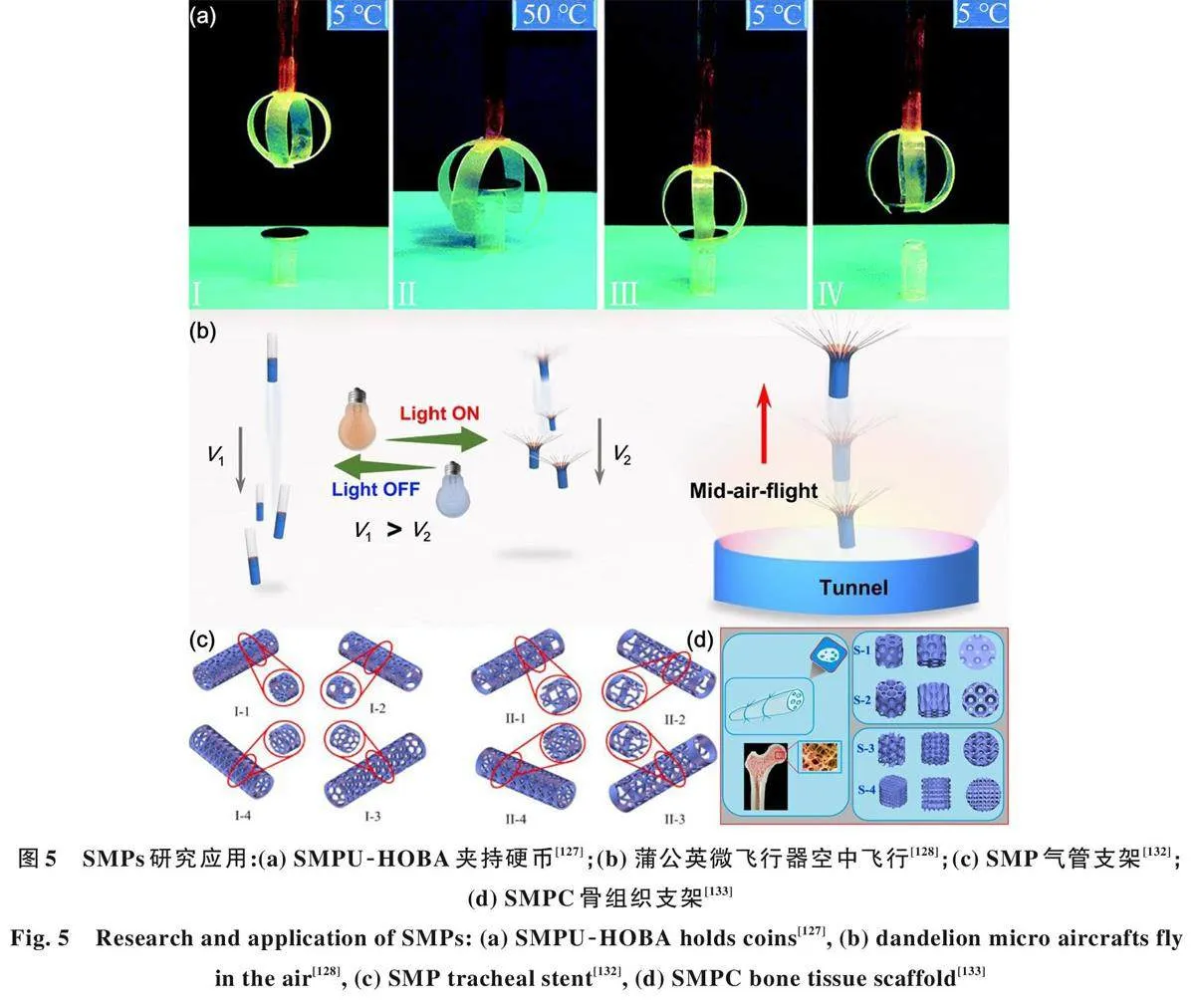
2. 2形状记忆聚合物(Shape Memory Poly⁃mers,SMPs) 形状记忆聚合物(SMPs)是一类高度适应性的智能材料,受到特定的外部刺激(如温度、光照、电、磁场等)时,能从一种暂时形状恢复到原始形状,具备形状记忆效应. SMPs 通常由两部分组成:一种是形成物理或化学交联网络的聚合物,负责材料的机械稳定性和形状记忆特性;另一种是作为开关相的聚合物,其转变温度或其他特性定义了形状变化的激活条件. 当SMPs 加热至高于其转变温度时,材料变得柔软并可以塑成新形状,冷却后聚合物“冻结”在此形状;再次加热至转变温度以上时,聚合物会恢复到原始形状. 典型的驱动应用如Mo et al[127]将十六烷基氧苯甲酸(HOBA)掺入含吡啶聚氨酯(PU)中,自组装出超分子液晶夹持器(SMPU ⁃HOBA)(图5a),在不同温度控制下能可逆捕获和释放硬币,成功证明了自夹持的可逆双向记忆效应.Chen et al[128]提出一种由聚酰亚胺(PI)和低密度聚乙烯(LDPE)组成的微型飞行器(图5b),完成了类蒲公英种子的仿生飞行. 然而,SMPs 最显著的优势在于其独特的可编程特性,能根据特定需求被编程成多种临时形状. 例如,用于风管制造的SMP 风管芯筒[129],基于形状记忆聚合物复合材料(SMPC)的智能铰链组装到太阳能电池阵样机中[130],SMPC 折叠翼无缝蒙皮用于可变形飞行器的折叠缝隙处[131]. 由于出色的生物相容性和机械性能,SMP 还可用于医学支架制作,如SMP 气管支架[132](图5c)、SMPC 骨组织支架[133](图5d)等.
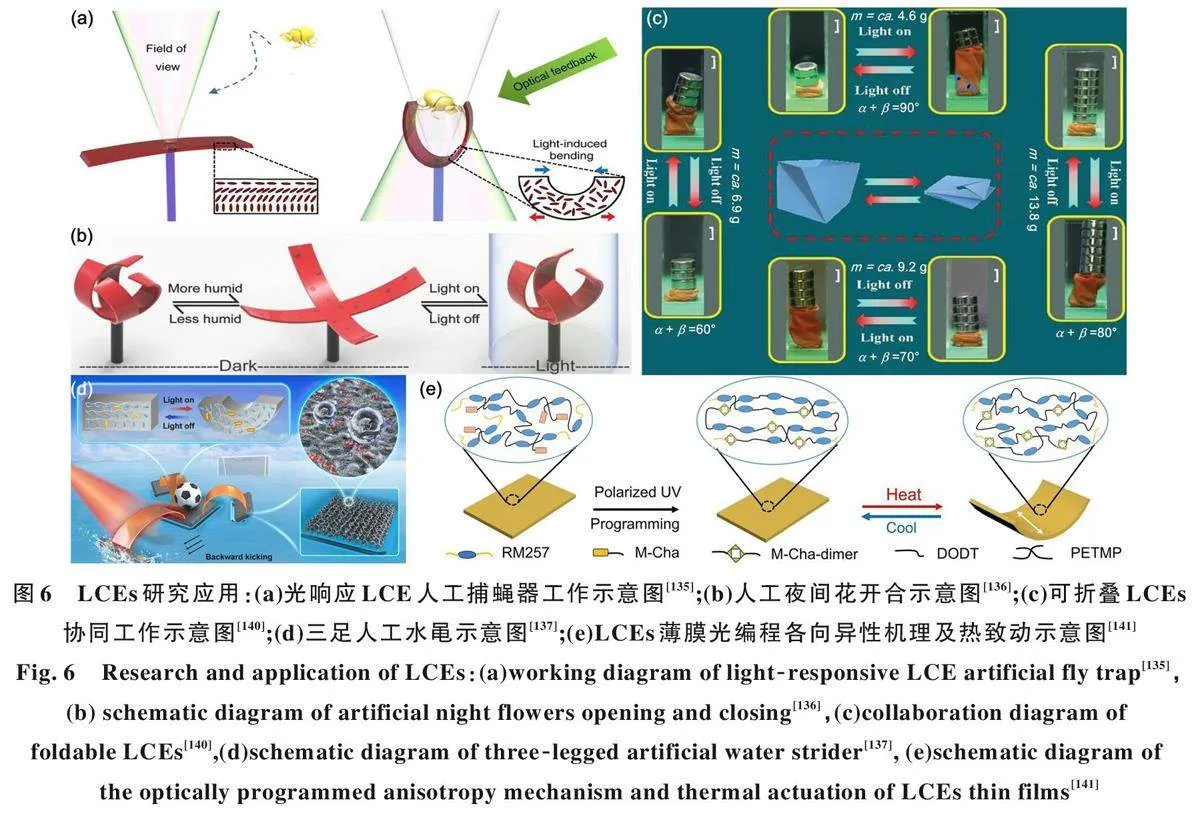
2. 3液晶弹性体(Liquid Crystal Elastomers ,LCEs) 液晶弹性体(LCEs)是一种独特的智能材料,兼备液晶材料的方向排列特性及弹性体的高弹性[134]. LCEs 的分子结构呈现类似液晶相态的有序排列,作为弹性体,在受力后发生形变,并在去应力后恢复原状. 其最常见的响应机制是对温度的敏感性,在特定温度下,LCEs 的分子排列会发生改变,引起宏观形状及体积变化. 通过掺杂光响应分子,可实现光照下的响应性能,在制造柔性机器人和仿生装置方面有着重要应用. 如图6a 所示,Wani et al[135]基于光响应液晶弹性体设计了人工捕蝇器,利用光来实现物体识别和自动闭合,实现纤维架构大小内的自我调节驱动.Wani et al[136]还设计了一种液晶网络人工花(LCN),通过光和湿度的协同控制来实现白天关闭、夜晚打开的功能,实现了低光照强度下的快速光致动(图6b). LCEs 也可用于水上行走,如Yang et al[137]在LCN 中原位嵌入微型可聚合金纳米(MiniGNRs 纳米单体),基于光热效应制作出水上三足仿水黾驱动机器人,为LCEs 提供了时空驱动特性,可用于货物运输等领域(图6d). 此外,LCEs 可用于人造肌肉系统,如Kim et al[138]与Sun et al[139]将LCE 应用于肌肉纤维驱动. 由于内部液晶分子的定向排列,LCEs 也可被编程为在特定条件下执行预定动作,如弯曲、扭曲、收缩与膨胀等. 如Huang et al[140]通过折痕结构对LCEs进行顺序编程,实现了具有大应变的光可控伸长驱动,完成了举起重物、自由伸长以及收缩操控远处物体的协同工作(图6c). Xu et al[141]利用在线偏振光下可发生光诱导环加成反应的查尔酮介质来编程LCEs 的各向异性,在独立的LCE 薄膜中形成有图案的取向分布,进而产生了复杂可逆的三维变形运动(图6e),在信息保存、加密等领域有不错的应用前景.
目前,光响应材料的光学驱动得到广泛的研究,在生物医学工程、软体机器人领域展现出巨大的潜力. 光照条件常常依赖于精准的控制,在软体驱动过程中,光源的强度、方向和持续时间需要满足极为苛刻的条件. 一般需要通过复杂的仪器和精细的实验设置来实现,在增加操作繁琐程度的同时也限制了驱动技术在更广泛的应用场景的实用性.
在驱动领域中,控制系统负责协调和管理整个驱动器的工作,兼具响应外部信号和控制调节的功能,为系统的稳定性和安全性提供保障. 水凝胶类的光响应材料具备优良的响应性能,但精细控制的需求成为实际批量应用中一个显著的挑战,限制了实用化进程. 在这类光响应材料中内置负反馈回路成为可行的方案之一,经由材料本身对环境参数的变化实现自我调节来满足实际应用中的驱动需求,大大增强了驱动器的智能性.
3 光响应柔性材料的自适应系统应用研究
通过对大自然的借鉴与学习,人类提出仿生学的概念并设计合成特殊的材料和器件,极大地促进了社会的发展. 自然界存在形形色色的自适应行为,例如植物的向光生长、动物和微生物自发靠近或远离光源. 基于这些自适应行为,生命体可以更大限度地获取能量,达到觅食或繁衍等目的. 目前,机电器件要实现人工趋光性和向光性,至少需要检测光的传感器、产生运动的驱动器、分析信号和控制运动反馈系统(计算机芯片和程序)三个功能部件. 然而,对于单一合成材料系统,不依赖外部控制实现集传感、驱动和反馈于一体的人工趋光性或向光性仍是一项艰巨的挑战.
光响应柔性材料能对光的变化进行快速而精准的响应,这意味着它们在接收光信号的瞬间可以改变物理或化学性质,如形状、体积或光学特性等,从而实现高精度的控制. 近年来该领域出现了一系列的前沿研究,体现了传感和驱动技术的融合,逐渐催生了一系列创新的光学自适应系统,光响应材料对光的变化作出直接反应,可实现对环境的自主适应和主动调节. 该衍生过程验证了光响应柔性材料系统在传感和驱动技术上的统一,在走向自主化的同时,也为光响应材料的发展打开了新的思路.
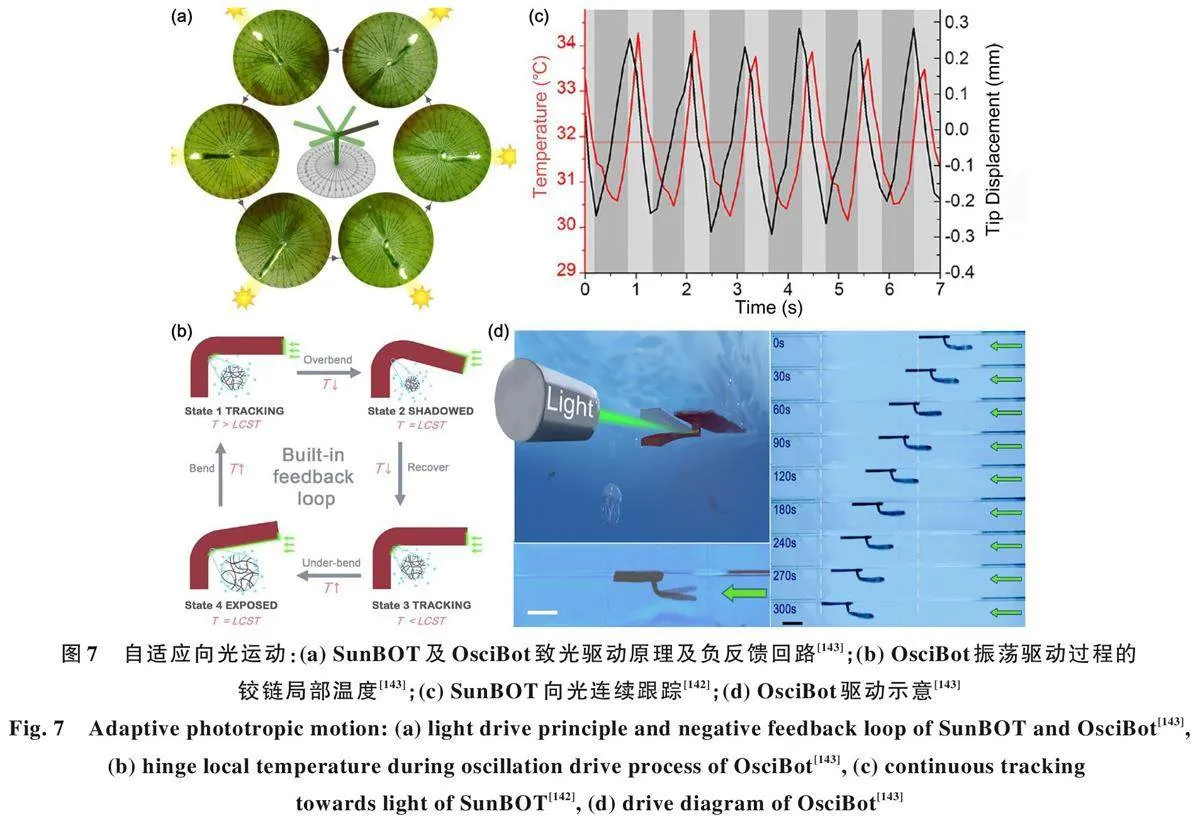
3. 1自适应向光运动 将光热响应纳米颗粒与热机械响应PNIPAM 水凝胶相结合,材料系统可响应外部光刺激并产生驱动. 2019 年Qian etal[142]借助PNIPAM 基水凝胶材料的相变特性,设计了一种模仿向日葵全角度追踪太阳光的仿生全向跟踪器(SunBOT),该跟踪器能在很宽的温度范围内瞄准和对准入射光的三维方向,仅需3. 5 s就可以通过大幅度的自身形变来对准光(图7a).这种自适应调节配置通过植根于材料系统的内置负反馈回路得以实现,内嵌的光热纳米材料(如金纳米或石墨烯纳米颗粒)赋予材料光热转化能力,使其受热局部温升. 当温度高于LCST 时,铰链处PNIPAM 水凝胶产生局部弯曲形变,结合重力作用系统过度弯曲的头部会遮挡入射光形成自遮挡效应,使系统弯曲的角度在入射光附近达到动态平衡,最终实现自适应向光行为(图7b). 同年,Zhao et al[143]降低水凝胶交联密度,提高了水凝胶柱体的柔软度,基于相同负反馈回路实现“ 过度弯曲”和“ 过度不弯曲”的往复过程中(图7b),由于自身过于柔软,柱体呈现出循环振荡,同时铰链温度也处于周期变化(图7c),在恒定光照条件下能够长时间维持自主驱动. 当水凝胶器件漂浮在水面上时,竖立的“桨”推动器件远离光源,形成了一个可在简单光刺激下的自驱动软体游泳机器人(OsciBot)(图7d),且能通过光路调节实现全方位运动. 在这两项工作中,PNIPAM 基水凝胶均同时实现了光传感、光学驱动以及内置负反馈回路的建立三个关键功能,进而实现了器件的自适应调节. 该自适应调节过程的实现,离不开水凝胶材料的光热转换、热扩散、水扩散及机械变形能力,通过模型和理论分析探索该自适应调节的条件和应用范围,对光响应材料的发展有着重要意义.
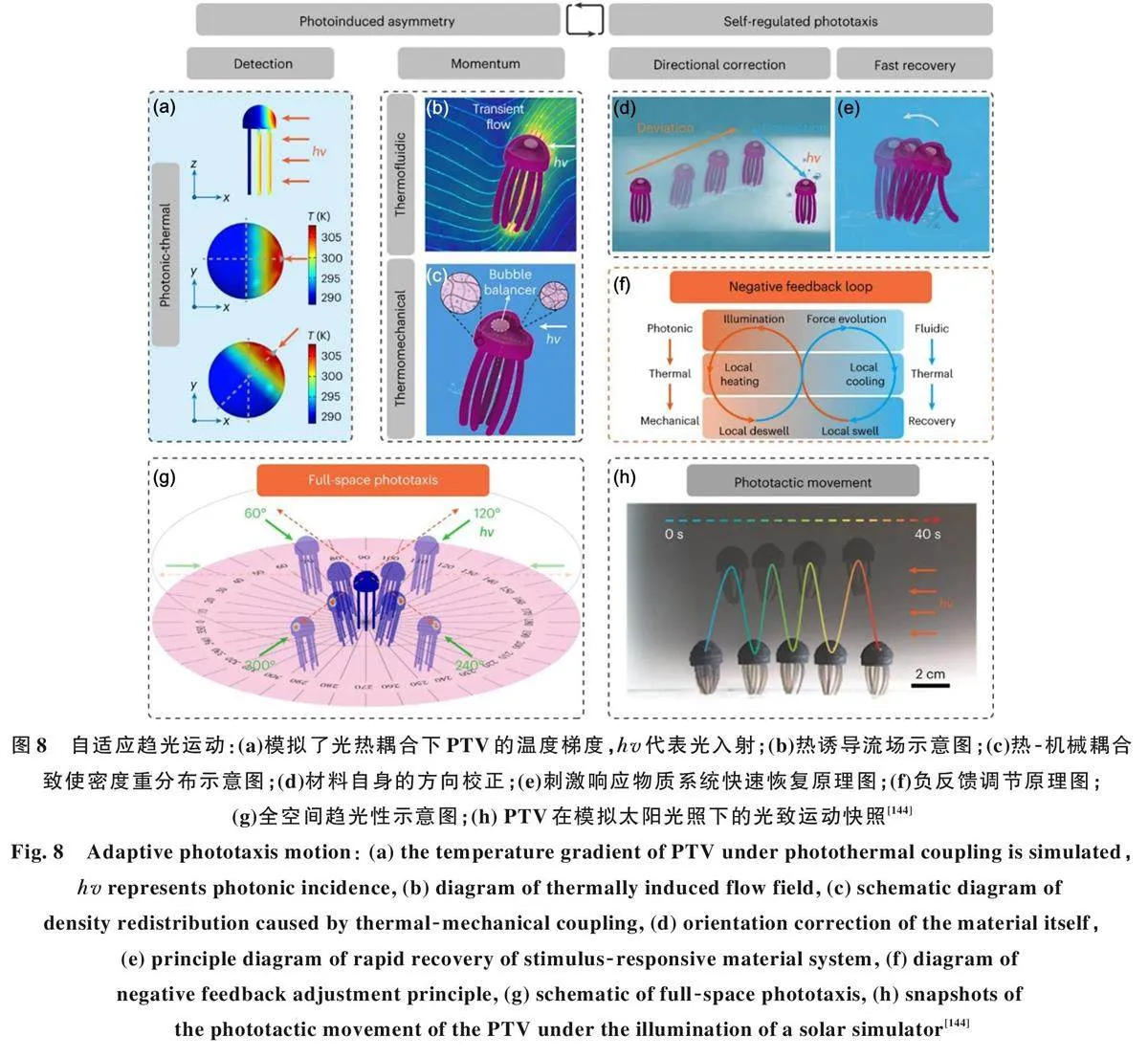
3. 2自适应趋光运动 现有的“向性”研究体现了系统的自适应能力,但大都局限于固定位置的光学调节或受到较强的边界条件制约. 最近,
Hou et al[144]开发了一个整体的、刺激响应的趋光软体载具(PTV),它具有类似水母的对称性几何结构,能迅速地朝向任意方向的稳定光源自主运动,并根据光源方向的变化,实时准确地追踪. 在光照条件下,光子诱导的多场可逆非对称性(图8a)使PTV 可以对任何入射方向作出响应,从而产生可提供动力的向光流体运动(图8b),并自发地采取最佳姿态进行低阻力的向光游动(图8c). 为了避免因受热表面引起上升流而产生的偏移运动,PTV 能自适应地增强受热表面的对流换热,从而为纠正方向偏差提供负反馈(图8d和图8f). PTV 以耦合纳米颗粒的PNIPAM 水凝胶作为基质材料,对来自不同方向的光照能作出快速响应(图8e). 在入射光角度为16°时,基于这种材料制成的向光性器件可在1 s 内迅速回复,比之前报道的最佳值快了近30 倍. 这种不拖线的趋光器件水下运动能力出色(18 mm·s-1),超过了常规电驱动、磁驱动和光驱动无线软机器人. 基于独特的自我调节能力,PTV 可实现多种运动模式,包括上升、连续跳跃、旋转、越过障碍和集群运动等. 高灵敏度和可逆的光化学机械反应使其能够在温和的光照条件下(lt;1 Sun)实现全方向、全角度和全空间的趋光性和精准操纵(图8g 和8h).在探索光响应材料的过程中,结合多物理场的耦合,光⁃热⁃机械⁃流体负反馈回路的开发实现了软体系统由简单运动向更高级复杂三维运动的转型,并从受限区域迈入自由体系.
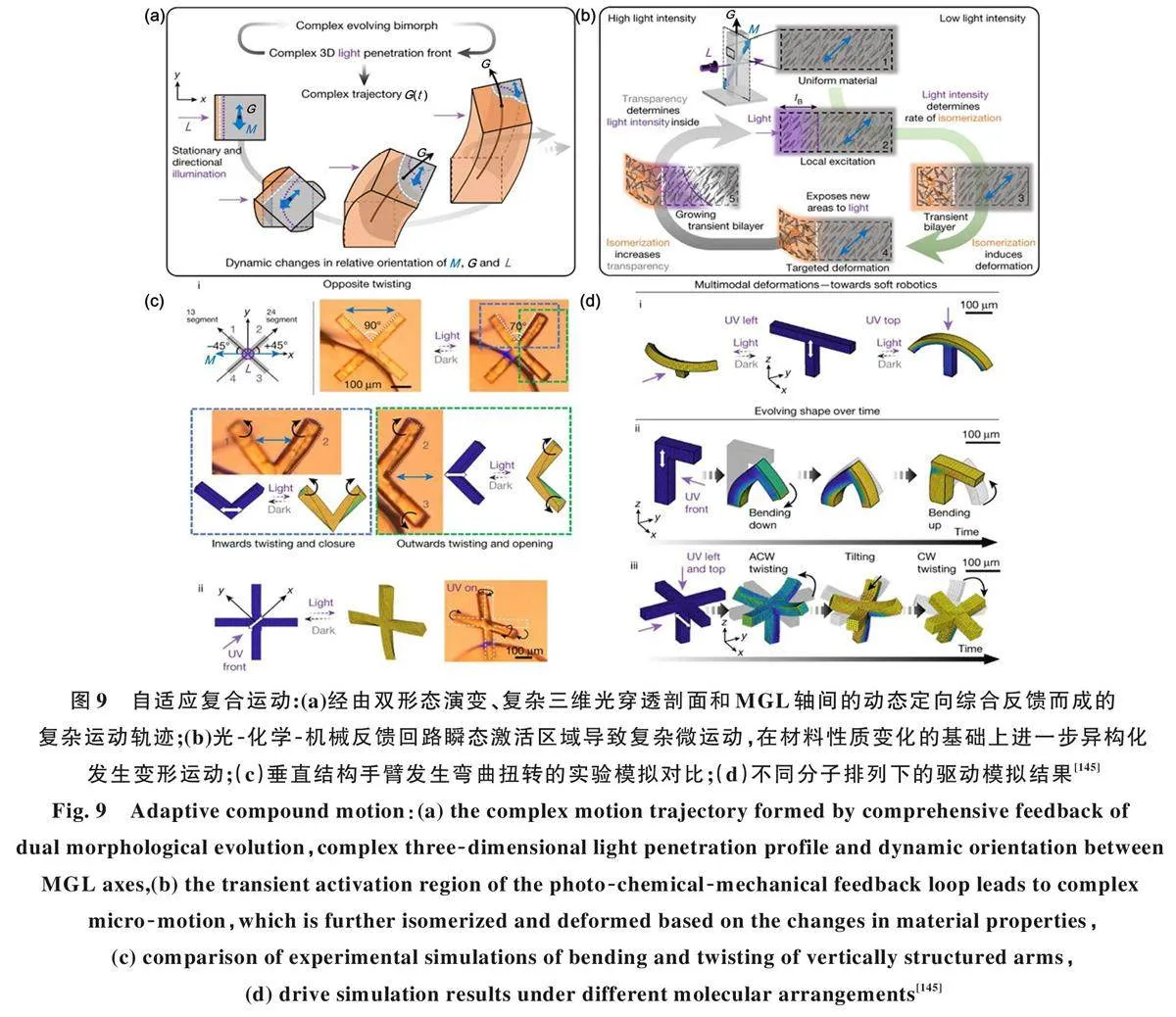
3. 3自适应复合运动 生命体的自我调节反应来自于体内的多层次集成反馈,错综复杂地编制了具有时空复杂性的动态运动轨迹. 然而,合成驱动器若试图实现沿特定轨迹的运动,可以通过制造明确编程到材料中,或通过连续改变外部刺激直接进行实时操纵. 哈佛大学的Aizenberg 团队[145]利用光响应材料的分子各向异性,基于光化学机械反馈回路在单一物质系统中实现了多样的、复杂的、非互易性的类似笔画轨迹的运动(图9a). 当由光响应液晶弹性体制作而成的微柱暴露在静态光源下时,分子经历有序到无序的转变并产生方向力,方向力诱发的机械运动会重新排布分子位置、几何结构及照明轴,并能持续、可逆进行(图9b). 在理论模型的指导下,通过定制参数,人为编程不同的运动,包括照射角度、光强度、分子各向异性、微结构几何形状、温度、照射间隔和持续时间,指定了由不同变形类型组成的多种运动路径,如扭曲、弯曲、寻光和避光的组合(图9c 和9d),设计了广泛的轨迹. 以材料的光化学机械反馈为基础,在紧密间隔的微结构阵列中创建自组织变形模式宏观描述微结构的复杂运动,展现了对于自适应系统深刻的理解. 微观结构复杂动作的实现,对软体机器人、生物医学设备和能量转导材料等领域的自主多模态驱动器,以及对自我调节系统的认知发展具有广泛的意义.总的来说,自适应系统的建立是连接光学传感和驱动的桥梁,充分发挥了光响应材料的灵活性. 在精密工业应用等高科技领域中,自适应调节概念拓宽了光响应材料的应用范围,为解决特定问题提供了新的途径,同时也推进了不同科学和工程领域间的融合,促进物理学、化学、材料科学、机械工程等领域之间的合作,为探索新材料和新技术提供动力.
4 结论
光响应材料因其光热转化和热机械形变特性被广泛应用于传感、驱动等领域. 研究表明,能在变化环境下实现复杂运动的驱动系统依然需要借助电子电路控制或人工干预. 电子电路编程的存在势必提高系统的自重进而增大能耗,人为操作给系统带来了不确定因素和维护成本. 就目前的光响应材料系统而言,其对于外界刺激的响应程度止于其材料的物理或机械极限且受到环境和材料特性的限制. 基于材料的相变特性,通过内嵌于系统的负反馈回路控制,光响应材料系统逐渐适应变化的环境并实现更为智能的向光、驱动和时空非互易性复杂运动. 这些自适应能力极大地拓宽了光响应材料的应用范围,推动了材料科学与人工智能、机器人技术等领域的交叉融合,预示着更加智能化、自动化的未来. 除此以外,以光遗传学[146-148]等为代表的生物光学在神经科学和细胞生物学中彰显了重要地位,光响应材料的开发为这一领域的发展提供了新的可能性,如响应特定波长的光精确控制神经通路等光遗传学工具,结合光遗传学和其他成像与刺激技术(磁共振成像、超声等)进行多模态研究,提高组织渗透性以激活更广阔范围的活体研究等. 本文对光响应材料在光学传感、驱动及自适应调节等方面的应用进行综述,探索了光响应材料在自适应系统中巨大的应用潜力,为光响应材料以及智能材料的研究发展提供了一个新的思路.
尽管光响应材料系统实现了包含感知、驱动、修复等多种功能,但其往往受到各项光参数的限制,例如光模式或光波长敏感、光照强度和光偏振依赖性强等. 开发能量利用率高、不挑刺激源且不依赖人工操作的自适应系统是未来重要的发展方向. 另一方面,就系统材料而言,现有的自适应光响应系统大多基于热⁃机械响应聚合物材料,其材料的适应性、机械强度、环境适应性、循环使用寿命等未能得到有效验证. 借助先进增材制造和工业生产技术探索性能更优、成本更低、使用周期更长且生物顺应性更好的材料是智能驱动器件发展的必由之路. 此外,基于光响应材料的反馈控制虽然取得了相应突破,但从传感、驱动到反馈的设计仍需进一步完善. 当前自适应系统感受的刺激源也较单一,未来可设计具备多种刺激响应特性的智能材料(如温度、湿度、电场、磁场等),以适应复杂、变化的环境,进一步拓宽器件的应用范围和提高器件的应用效率. 此外,开发新的反馈回路甚至是多种自决策闭环协同合作,进而拓展多物理场耦合驱动模式. 根据环境需求选择最佳工作模式,实现更高的智能化. 总之,开发不拘泥于材料选择、不受限于工作环境且在自由空间实现灵活自主行为的高效、强劲且智能的自适应系统是未来驱动器件、软体机器人和多功能材料系统发展的重要方向.
(责任编辑 高善露)
猜你喜欢
汽车实用技术(2022年7期)2022-04-20 11:45:04
房地产导刊(2020年11期)2020-12-28 01:32:30
铁道通信信号(2019年4期)2019-10-10 03:42:56
制造技术与机床(2019年7期)2019-07-22 03:43:10
读与写·教育教学版(2016年12期)2016-12-23 18:09:36
小学教学参考(综合)(2016年7期)2016-12-22 20:23:18
散文百家·下旬刊(2016年9期)2016-11-23 22:47:58
通信电源技术(2016年1期)2016-04-16 04:57:31
语文教学之友(2016年2期)2016-02-27 12:17:41
小学教学参考(综合)(2016年1期)2016-01-29 10:56:05