基于机器视觉的在线果树靶标识别装置
2025-01-19 00:00:00钟沅陈泽鸿郑君彬宋淑然孙道宗刘洪山
中国农机化学报 2025年1期










摘要:
为在实际果园中实现果树的在线识别检测,设计一种基于机器视觉的果树靶标识别装置。首先提出一种应用在DSP端的在线果树靶标识别算法,用HSV色度分割法对图像背景进行分割,然后对分割后的树冠信息(白色像素占有率的数值变化规律)进行研判,设计横框和竖框两种识别算法,并设计一台搭载识别装置的移动小车进行田间试验。预试验发现光照度变化对识别效果的影响较小;选光照度为650Lux开展进一步试验。结果表明,在车载速度分别为0.2m/s、0.4m/s和0.8m/s时,横框识别算法的识别准确率分别为88%、84%、34%,识别准确率随小车速度的增大呈现递减规律,从摄像头对准靶标植株中心的时刻起,到系统判断出存在有效靶标植株时,产生0.4~0.8s的检测延时。而相同条件下,竖框识别算法的识别准确率分别为88%、86%、84%,且识别延时较小(0.2~0.3s)。竖框识别算法的优点是识别速度快、反馈的位置信息丰富,横框识别算法则能同步分析果树树冠轮廓的大小,根据两种算法得到的位置信息有利于进一步优化控制单棵植株的喷雾时间。
关键词:果树;机器视觉;靶标探测;DSP;横框识别算法;竖框识别算法
中图分类号: S126; TP391
文献标识码: A
文章编号:2095-5553 (2025) 01-0164-07
Online fruit tree target recognition device based on machine vision
Zhong Yuan1, 2, Chen Zehong1, Zheng Junbin3, Song Shuran1, Sun Daozong1, Liu Hongshan1
(1. "College of Electronic Engineering/College of Artificial Intelligence, South China Agricultural University, Guangzhou,
510642, China; 2. Zhuhai Vocational Training Guidance and Service Center (Zhuhai High-skilled Talent Public
Training Center), Zhuhai, 519000, China; 3. Guangdong Greenway Technology Co., Ltd., Dongguan, 523129, China)
Abstract:
In order to realize online identification and detection of fruit trees in actual orchards, a fruit tree target identification device based on machine vision is designed. Firstly, an online fruit tree target recognition algorithm applied to DSP is proposed, and the background of the image is segmented by HSV chroma segmentation method. Then, the crown information after segmentation (the numerical change law of white pixel occupancy) is judged, and two recognition algorithms, horizontal frame and vertical frame, are designed. A mobile car equipped with identification device is designed and tested in the field. It is found in the pre-experiment that the change of illumination has little influence on the recognition effect. Further experiments were carried out under the illumination of 650Lux. The results showed that when the vehicle speed was 0.2 m/s, 0.4 m/s and 0.8 m/s, the recognition accuracy of the horizontal frame recognition algorithm was 88%, 84% and 34%, respectively, and the recognition accuracy was decreasing with the increase of the vehicle speed. From the time when the camera aligns with the center of the target plant to the time when the system determines that there was an effective target plant, the detection delay of 0.4-0.8 s was generated. Under the same conditions, the recognition accuracy of the mullion recognition algorithm was 88%, 86% and 84% respectively, and the recognition delay was short (0.2-0.3s). The advantages of the vertical frame recognition algorithm are fast recognition speed and rich feedback position information, while the horizontal frame recognition algorithm can synchronously analyze the size of the crown contour of fruit trees. The position information obtained from the two algorithms is conducive to further optimizing and controlling the spraying time of a single plant.
Keywords:
fruit tree; machine vision; target detection; DSP; horizontal frame recognition algorithm; vertical frame recognition algorithm
0"引言
病虫害防治是果园管理作业中重要的环节[1],但是我国采用的大容量淋雨式喷雾法农药有效利用率低[2],大量药液流失到地面或飘移到空气中[3],引发环境污染、农药残留超标、作物药害及施药者中毒等问题[4]。
随着传感器和控制技术的发展,根据不同作物对象变量控制药液喷施量和风速的精确喷雾的概念应运而生。要完成变量喷雾,必须先对作物的生长特性进行探测,常用的有红外、超声波以及激光探测传感器[5],它们在靶标探测方面已经很成熟,但因为返回结果简单[6]而遇到发展瓶颈。随之机器视觉技术被引进到农业领域[7],通过采集果树图像的信息,获取树形、轮廓等特征,从而建立更精确的扫描式喷雾系统[8]。
李睿远[9]采用自动阈值分割法提取出目标靶标的关键参数,根据参数控制车载风送喷雾机上每个喷嘴的开闭及步进摆动。张俊雄等[10]研发了一套可进行病害信息诊断的温室内移动对靶喷雾系统,通过图像分析将采集区域单元化确定病害等级,以控制喷雾时间实现变量喷雾。周鸣川[11]搭建的对靶喷雾平台,基于超绿色模型灰度化及分割方法完成对绿色靶标植株的有效提取,指导喷头精准对靶喷雾。丁为民等[12]构建了树冠面积与树冠体积对数之间的线性关系模型,进一步提出了基于机器视觉的果树树冠体积单点和多点测量方法,该方法通过面积以及轮廓特征量均能很好地表达树冠体积特征。
国外很早就尝试将机器视觉应用到农业靶标植株探测上,2004年Giles等[13]通过对靶标特征的检测来自动调节药液浓度与喷嘴流量。次年,该团队通过摄像头采集图片来定位种植垄的中心线,进而控制喷嘴以植株为靶标进行喷雾,使对靶喷雾的自动化水平进一步提升。Mario等[14]开发出一种通过图像将靶标形状和颜色进行融合处理的方法,并将其应用于莴苣收获机器人,大幅提高了辨别率。Kang等[15]将激光扫描技术与机器视觉相结合,基于超绿算法设计出葡萄根蘖位置识别系统。Calderón等[16]利用无人机搭载高分辨率的多光谱仪以及热成像摄像头实时监测罂粟的霜霉病情况,再根据PC端的分析结果对不同区域的罂粟实施按需喷药。Shalat等[17, 18]采用激光和图像技术相结合的方法研究并获得果园靶标树干位置探测方法,该方法还能成功区分树桩和果树支撑架等非树干物体。Asaei等[19]开发了一个基于机器视觉的传感器系统和一个除草剂的选择性控制系统并将其固定在喷雾器中,根据树木的绿色冠层精确施用农药,较传统方法节省54%的化学药品消耗。
目前视觉技术在靶标探测的应用多数集中于实验室内的可控环境;摄像头采集的图像需要经过PC端处理再传送至喷雾执行机构;受各种软硬件条件的制约,使得机器视觉在农业领域的应用市场化还比较困难。为解决当前对于机器视觉在果园精细喷雾研究中存在的实时识别技术空缺问题,本文采用机器视觉技术实现靶标识别功能,设计一种基于TMS320DM642的靶标识别装置,并对该装置进行田间在线靶标识别试验,为植保机器的智能化作业提供研究基础。
1"算法设计
1.1"图像分割处理
1.1.1"提取颜色特征
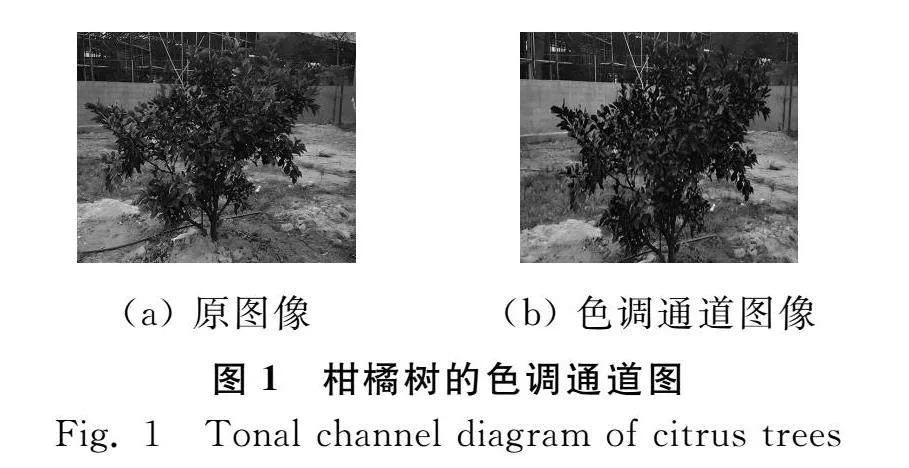
HSV颜色空间由色调(H)、饱和度(S)、明度(V)组成,色调用角度度量,红色为0°,绿色为120°,蓝色为240°。针对柑橘树跟图像背景在色度上的视觉差异,提取柑橘树的色调通道来进行独立分析,如图1所示。
对110°~125°的色度区间进行提取,如图2所示,成功去除杂草、土壤、滴灌管道以及其他生活杂物的干扰。在190°~210°的色度区间,可以清晰地看到其他干扰物的轮廓。
采用形态学滤波对果树与背景分离后的图像进行零散干扰的排除。对比图3四种处理效果可得,先开运算后闭运算组合的零散干扰过滤效果更优。
图4是果园中生长期为一年的柑橘树图像,可见经过色度提取以及形态学滤波以后的图像已经可以排除大部分非植株靶标的干扰,中间的白色区域是要提取出来的柑橘树树冠信息,背景分割工作初步完成。
1.1.2"果树轮廓匹配算法
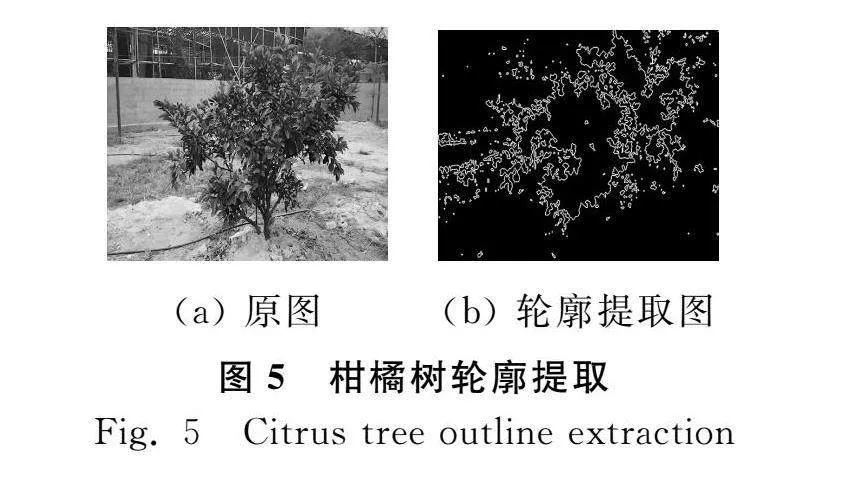
在进行柑橘树识别时,通过分析新采集图像的轮廓,提取某些特征矩,再与系统中预先存取的果树轮廓进行匹配对比,从而判断实时采集的图像中是否存在柑橘树。利用OpenCV提供的cvFindContours函数查找经过背景分割后果树图像的外轮廓,如图5所示。
在实际应用中,搭载在小车上的摄像头会受到运动抖动的影响,造成图像在轮廓提取时出现较大的偏差,同样,图像的纹理特征以及形状特征也会受到影响。在我国南方的果园中,果树的种植间距小,种植不规范以及修剪不统一,这些农艺上的特点也制约了纹理、形状和轮廓等特征在柑橘树识别上的应用。在动态的图像采集中,相比于纹理、形状和轮廓特征,颜色特征具有较强的稳定性,因此,选择颜色特征作为靶标识别的基础。
1.2"基于DSP端的靶标识别算法
靶标识别算法的实际应用需要部署在可移动的边缘设备上,因此选择满足运算性能需要且可编程的高性能的数字信号处理器(DSP),使硬件端的灵活性达到PC端的水平。
1.2.1"硬件选型
完成动态的在线靶标识别功能需要选择专门用于视频图像领域的DSP芯片,由于在进行动态靶标识别时,视频帧率需要达到10帧/s以上,输入和输出视频通道各需要1个,整个系统的功耗要尽量低,故在进行初步筛选后,选择TMS320DM642作为本设计的主控芯片:在保留C64x原有内核机构及大部分外设的基础上增加3个双通道数字芯片口,可同时处理多路数字视频流。为方便项目的开发,选择以TMS320DM642为主处理芯片的系统板(QXD-DM642DVS)作为算法移植的硬件端。
在PC端完成靶标识别算法编写并对其功能进行验证后,需要将算法移植到TMS320DM642的硬件端。移植与优化过程需注意语言的使用规范及内存的合理分配,同时要对读取到的CCD摄像头采集的YUV格式图像转换为HSV色彩模型,并以9×9的方式进行切割分块以缩短处理时间。
1.2.2"冠层不同位置白色像素占有率计算
不同于PC端,DSP端的算法设计面临两大问题:(1)采集图像容易受外界因素的影响;(2)算法的复杂度。进行柑橘树的识别,提取出来的特征量要尽量稳定且识别度高,分析算法要尽量简便以免影响识别的实时性。基于以上考虑,选用颜色特征作为柑橘树识别的特征量。在对比果园多种场景的背景分割图后,发现采集的图像中对应柑橘树的位置背景分割图会存在大片的白色区域。基于这种对应关系,设计一种白色区域占有率的分析算法。
首先对背景分割图进行分层,在720像素×576像素的背景分割图中,加入500像素×576像素的取景框,并从上到下平均分成3个部分,分别对应树冠的上中下层。分析冠层不同位置白色像素占有率的变化趋势,通过白色像素占有率的数值大小来推断取景框内是否存在有效的靶标植株,如图6所示。
取景框的3个不同位置对应的矩形框大小均是192像素×500像素,则冠层不同位置以及取景框内白色像素占有率的计算如式(1)和式(2)所示。i=1表示冠层底部;i=2表示冠层中部;i=3表示冠层顶部;i=4表示整个取景框内。
ti=si192×500×100%"i=1,2,3
(1)
t4=s4576×500×100%
(2)
式中:
ti——框i的白色像素占有率,%;
si——框i中白色像素的总个数。
为验证该算法能否识别柑橘树,在硬件端上进行仿真试验。
1.2.3"冠层不同位置白色像素占有率分析
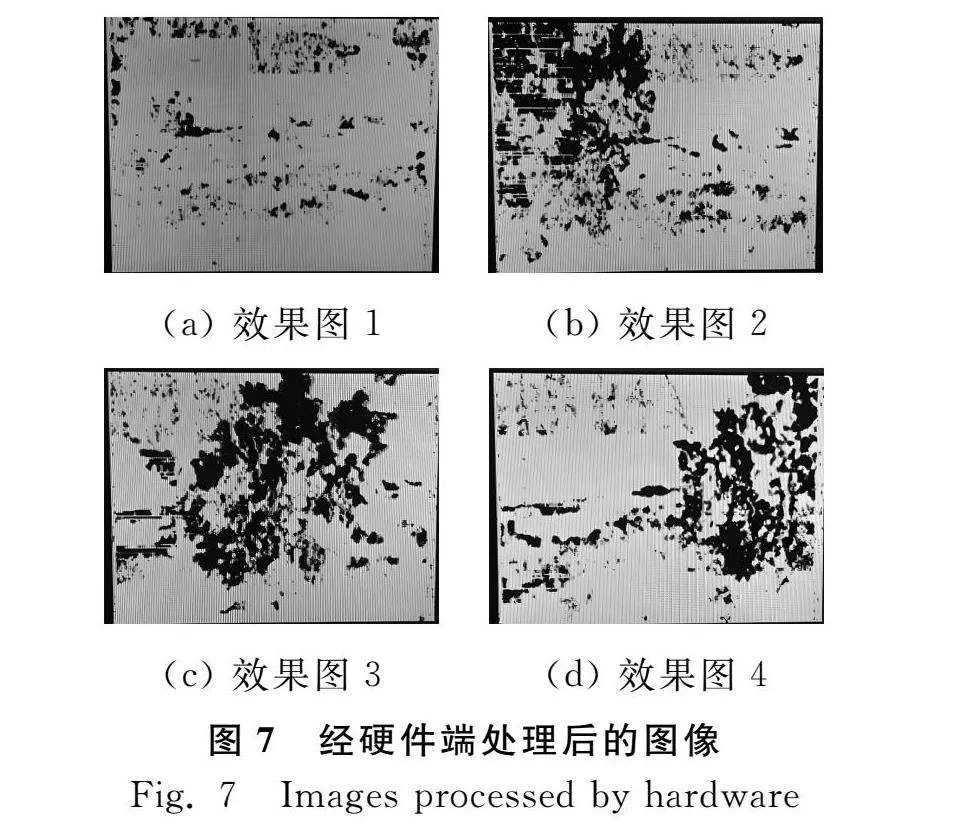
在柑橘树正前方,匀速地将摄像头从柑橘树的右侧平行移动到左侧。为凸显经过背景分割后的靶标植株部分,在硬件端算法中加入反色程序。如图7所示,硬件端的处理效果达到PC端处理的标准且实时性强。
记录图7各取景框内白色像素占有率数值大小,如表1所示。在图7(c)中t1,t2,t3和t4达到最大值,对照原图可见,此时柑橘树整个树冠正好完全出现在取景框内。
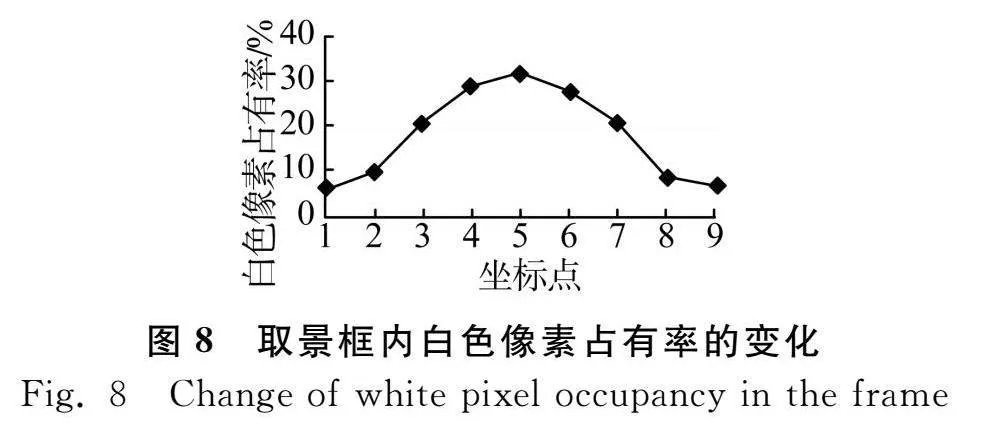
为深入观察取景框内白色像素占有率的波动,在视频流中按时序均匀的截取9个点,将各点取景框内白色像素占有率的数值整合成折线图,如图8所示。在视频流的第五点处,正好对应视频流的内容是柑橘树完整的出现在取景框内,进一步验证这种基于白色像素占有率的分析算法不但可以识别柑橘树,还能分析柑橘树在冠层不同位置的大小,为精准喷雾的实现提供技术支持。将基于这种思想的算法称为横框识别算法。
在完成数据分析后,TMS320DM642需要将分析结果输出到下位机中,由下位机完成喷雾工作。为简化数据分析与传输,在算法中,设定当冠层不同位置白色像素的占有率超过一定百分比的时候,对应输出高电平。
2"靶标识别装置设计
为检验该算法在室外的在线识别效果,设计一辆可搭载靶标识别装置的小车,小车由3部分组成,分别为驱动模块、图像处理模块及图像采集模块。除底板用不锈钢板搭建外,其他两层均使用亚克力板,中间的承接部位使用铝型材。
车载装置的底板由一块不锈钢板、4个铝合金轮子、4个直流电机及其支架、2个电机驱动模块、1个主控制模块、1个AS-13数据传输模块以及2个12 V电源组成,主要负责电机的驱动控制,实现速度可控的直线前进与后退运动。驱动时通过AS-13数据传输模块,将控制指令通过串口传输到车载装置的主控模块中,车载装置的主控模块根据指令内容改变IO口的输出电平以及PWM信号的占空比,直流电机模块根据车载装置主控模块的输出信号改变直流电机的运动速度以及运动方向。
2.1"驱动部分
1) 电机驱动模块:为兼顾负重与速度,采用直流减速电机,由于电机扭力需大于0.245N·m,转速不低于300r/min,选用AQMH2407ND直流电机驱动模块,搭配峰值电流3A、转速366r/min、扭力0.294N·m 的37GB-385直流减速电机,利用MOS管搭建的双H桥电路及光耦隔离技术,实现对大电流电机的安全有效驱动。
2) 主控制模块:该车载装置为四轮启动,采用4个直流减速电机,需要4个PWM输出口,8个普通IO口,AS13-TTL数据传输模块进行串口通信另需1个串口。在满足系统IO口要求的基础上,选择STM32F103C8T6作为车载装置主控芯片。
3) 数据传输模块:车载靶标识别装置在运动控制及TMS320DM642系统板传输处理结果时均需使用数据传输模块。考虑到信息传输的可靠性与信息读取的方便性,选用AS13-TTL无线数据传输模块,采用Silicon最新的SI4463主芯片,TTL电平输出,可兼容3.3V与5V的IO口电压。
4) 电源选型:在驱动部分,电机运转需要12 V电压,当4个电机同时运转时,峰值电路可达12 A。选择DC1298A大容量锂聚合物电池,其输出电压为12.6V,电流为20 A,容量为9800mA。
2.2"图像处理部分
1) 摄像头选型:由于摄像头采集的图像色彩还原度及清晰度直接影响后续的数据处理及靶标识别,因此,在对摄像头进行选型时,考虑信号制式、镜头大小、清晰度,选择1/3英寸索尼CCD摄像头,具有480电视线,信号制式为PAL:752H×582V,信号比≥48,视频输出幅度为BNC 1.0Vp-p/75Ω。
2) 图像采集:主要由摄像头、云腾三脚架及监控显示屏组成。摄像头将实时采集的图像传输到TMS320DM642系统板中,经系统板内部算法处理后,经视频传输线将图像显示于监控显示屏。
3) 图像处理:图像处理部分由TMS320DM642系统板、决策读取模块和AS13-TTL数据传输模块组成。工作时,摄像头将实时采集的图像传输到TMS320DM642系统板中,经系统板内部算法分析处理后,生成的决策结果通过IO口传输到决策读取模块,决策读取模块根据决策内容生成喷雾指令,经过AS13-TTL数据传输模块,将喷雾指令传输到喷雾执行机构。
4) 图像处理效果显示:为能实时观察算法处理后的图像效果,在车载靶标识别系统上添加监控显示屏,方便实时调节处理算法,结合车载装置尺寸,选用对比度为350∶1,制式为PAL/NTSC的监控显示屏。
3"果园识别试验
3.1"预试验
影响在线识别效果的因素主要有光照度和车载装置的速度,但通过人为判断一定范围内光照强度变化对图像的影响较小,因此进行预试验验证该判断是否正确。预试验在华南农业大学工程学院北楼6楼果园进行,在过道的左右两侧各分布着5棵果树,行距为2.5m,株距为1.8m,根据其排布规律,将右侧果树命名为A组,左侧果树命名为B组。
基于横框识别算法,在车载装置移动速度为0.4m/s的前提下,3种不同光照度情况(250Lux,650Lux,1750Lux)下对两组柑橘树(一共10棵果树)分别进行10次识别测试,每棵果树的识别准确率如表2所示。
对表2的数据进行综合分析可以发现,在3种不同光照度(250Lux,650Lux和1750Lux)下,在线靶标识别装置在0.4m/s的移动速度下对柑橘树的识别准确率分别为83%、85%和82%。可见该范围内光照度的变化对在线靶标识别的影响较小。
3.2"竖框识别算法
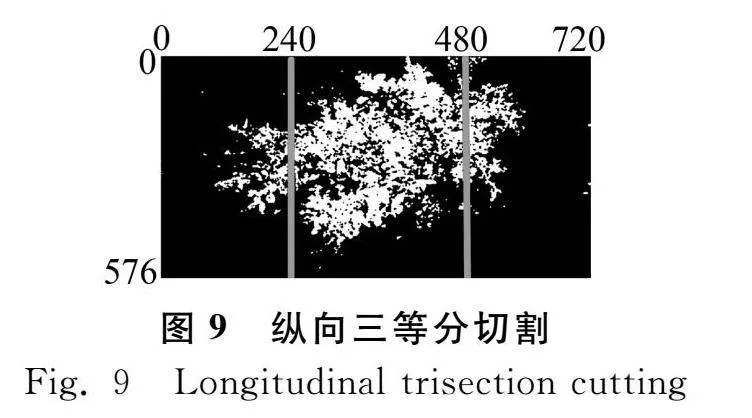
在预试验过程中发现横框识别算法有0.4~0.8s检测延时。因为横框识别算法提取的是正对靶标植株时取景框内不同冠层白色像素占有率的数值特征,所以只有当摄像头经过靶标植株中心时系统才采集到超过决策识别阈值的数值。针对采集与检测不同步问题,将实时采集的图像从纵向上分成3块,如图9所示。
每个分框的大小为240像素×576像素。这样不需要等植株完全进入到取景框内才开始识别,只要监测并分析出3个分框内白色像素占有率的数值变化规律,即可对靶标植株进行识别,还可以进一步探测出靶标植株与摄像头的相对位置。实时采集的图像在3个竖框内白色像素占有率的数值大小计算如式(3)所示,i=5表示右侧竖框;i=6表示中间竖框;i=7表示左侧竖框。
ti=si576×240×100%nbsp;i=5,6,7
(3)
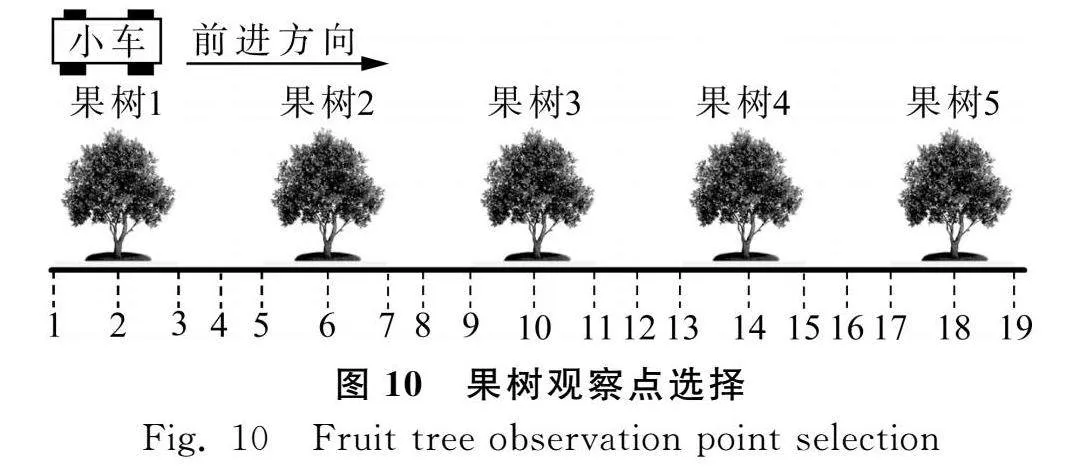
选择正对果树左侧边缘、果树正中间、果树右侧边缘以及两棵果树中间的位置点为观察点, 19个果树观察点的选择如图10所示,果树在摄像头右侧时的观察点记为E1~E19,左侧记为F1~F19。
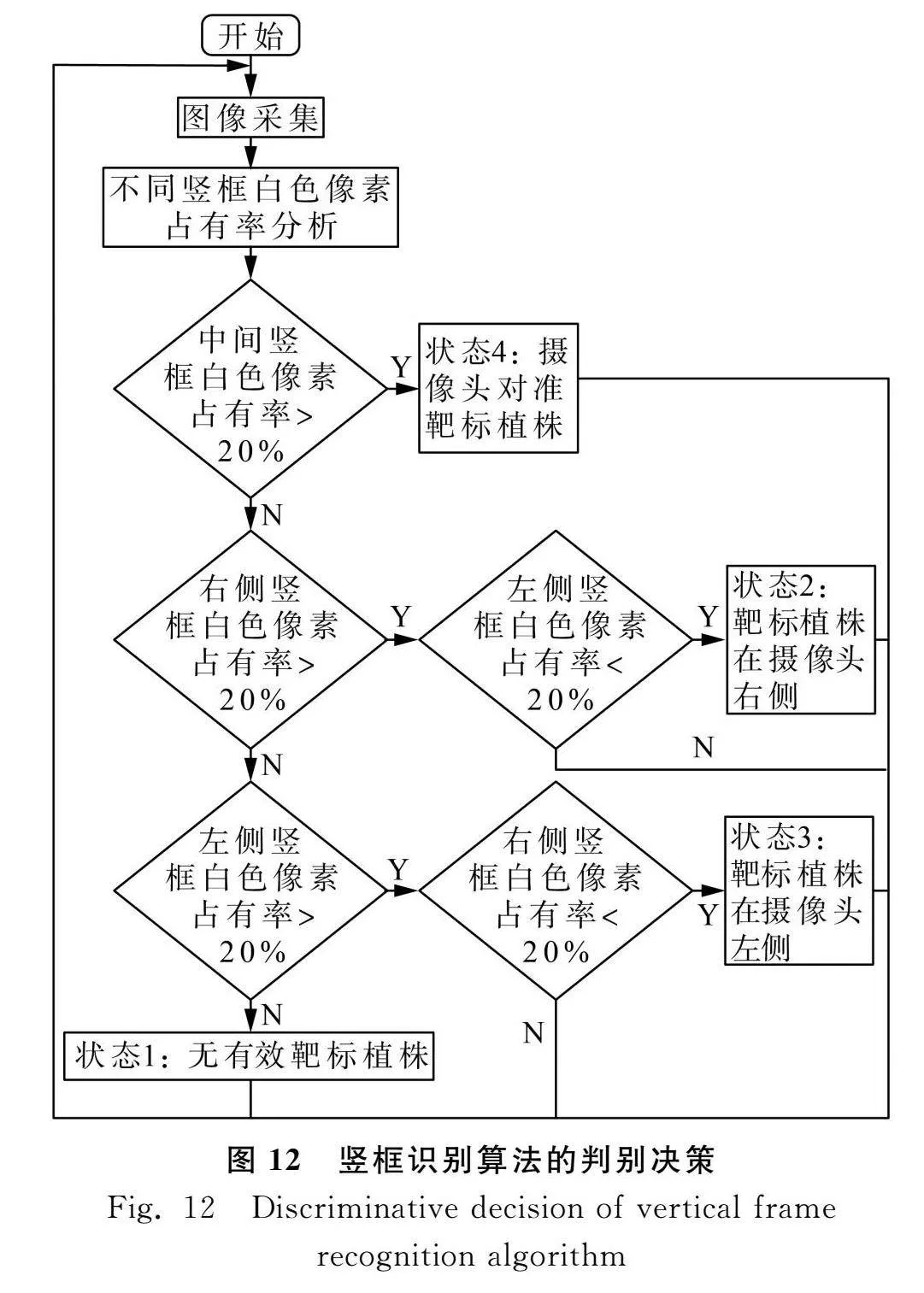
19个位置点遵循着“黑色—中灰—浅灰—无”的变化规律,相应摄像头对准的位置关系是“果树左侧边缘—果树正中间—果树右侧边缘—两棵果树中间”从这些规律的色彩变化即可推断出摄像头与有效靶标植株之间的相对位置。通过以上分析,结合车载装置的运动方向,即可设计出竖框识别算法,判别决策如图12所示。
如图12所示,根据摄像头与靶标植株的相对关系,设立4种位置状态。当靶标识别移动装置对行进路径右侧的果树进行识别时,在程序内部,当系统由状态3向状态4转变时,判定出现有效靶标植株,当系统由状态4向状态2转变时,判定靶标植株正在离开摄像头;靶标识别移动装置对行进路径左侧的果树进行识别时,在程序内部,当系统由状态2向状态4转变时,判定出现有效靶标植株。当系统由状态4向状态3转变时,判定靶标植株正在离开摄像头。
3.3"基于两种算法的靶标识别试验
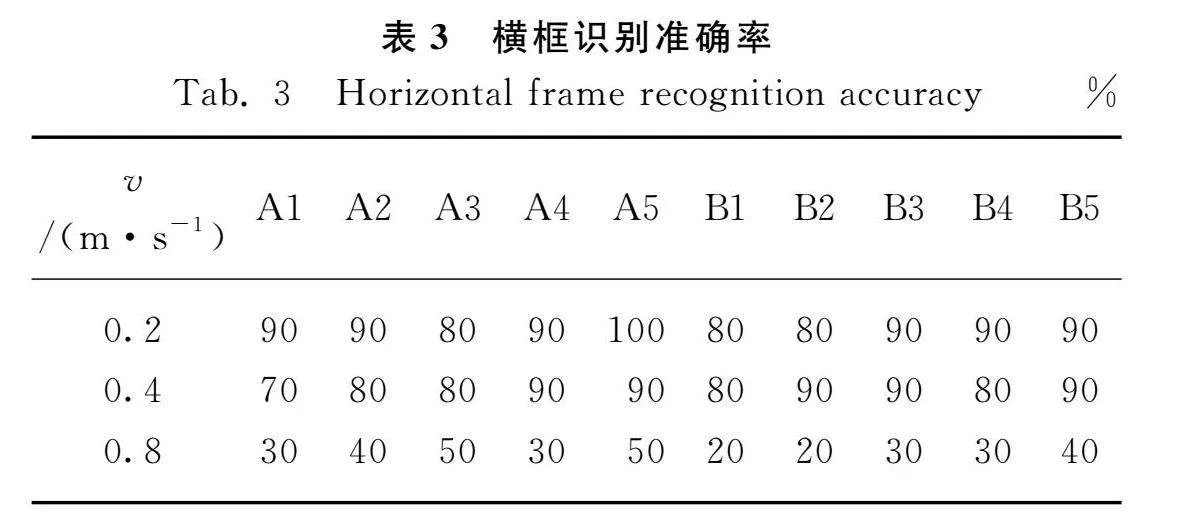
基于预试验可知,光照度变化对在线靶标识别的影响较小,所以正式试验只进行车载装置在不同移动速度下的识别试验。在650Lux的光照度下,在线靶标识别移动装置在3种速度v挡下(0.2m/s,0.4m/s,0.8m/s),对两组果树进行10次识别测试,横框和竖框识别准确率如表3及表4所示。
对表3、表4综合分析可知,横框识别算法分别在不同速度0.2m/s、0.4m/s和0.8m/s时,对柑橘树的识别准确率为88%、84%、34%。速度越大识别准确率越低。因为图像处理系统处理的并不是连贯的图像流,而是在内容上有一定残缺的视频流,如果车载装置速度过快,图像流的残缺率就会上升,影响判断结果。相同条件下,竖框识别算法的识别准确率分别为88%、86%、84%,而且检测延时较少(0.2~0.3s)。这种算法对信息量的要求不高,在视频流残缺率较高的情况下,依然能保持较高的识别准确率。
4"结论
设计一种基于机器视觉的在线靶标识别算法,实时采集的图像进行背景分割后对提取的树冠信息(白色像素占有率)分割出不同的矩形框,根据矩形框内白色像素占有率的数值变化规律设计横框识别算法和竖框识别算法。在识别装置的硬件基础上,测试两种识别算法在不同外界环境下对果园柑橘树的识别准确率。
1) 光照度变化对识别效果影响较小。车载速度为0.4m/s时,在不同光照度250Lux、650Lux和1750Lux时,横框识别算法的识别准确率分别为83%、85%、82%。
2) 识别准确率随速度增大呈递减规律,速度越高,递减规律越明显,识别准确率越低。光照度为650Lux时,在车载速度0.2m/s、0.4m/s和0.8m/s时,横框识别算法的识别准确率分别为88% 、84%、34%。在从摄像头对准靶标植株中心到系统判断存在有效靶标植株时有0.4~0.8s的检测延时。相比横框识别算法,竖框识别算法在0.8m/s的速度下依然能保持80%以上的识别准确率,且识别延时较小(0.2~0.3s)。
3) 竖框识别算法的优点是识别速度快,反馈的位置信息丰富,系统可以根据这些位置信息推断出靶标植株进入与离开摄像头拍摄范围的时间,有利于进一步控制单颗植株的喷雾时间。但相比于横框识别算法,竖框识别算法无法同步分析果树树冠轮廓的大小。
参"考"文"献
[1]
顾家冰, 丁为民, 邱威, 等. 果园变量施药机械及施药技术研究现状与趋势[J]. 果树学报, 2014, 33(6):1154-1157.
Gu Jiabing, Ding Weimin, Qiu Wei, et al. Current research situation and development trend of equipment and technology for orchard spraying [J]. Journal of Fruit Science, 2014, 33(6):1154-1157.
[2]
邹雪剑, 臧秀法, 王晓勇. 我国植保机械与施药技术现状及发展措施[J]. 农业科技与装备, 2014(12):49-50.
Zou Xuejian, Zang Xiufa, Wang Xiaoyong. Current situation and development measures of plant protection machinery and application technology in China [J]. Agricultural Science and Technology and Equipment, 2014(12):49-50.
[3]
贾卫东, 张磊江, 燕明德, 等. 喷杆喷雾机研究现状及发展趋势[J]. 中国农机化学报, 2013,34(4):19-22.
Jia Weidong, Zhang Leijiang, Yan Mingde, et al. Research status and development trend of spray bar sprayer [J]. Journal of Chinese Agricultural Mechanization, 2013, 34(4):19-22.
[4]
张海锋, 许林云. 果园喷雾机发展现状及展望[J]. 中国农机化学报, 2014,35(3):112-118.
Zhang Haifeng, Xu Linyun. Development status and prospect of orchard sprayer [J].Journal of Chinese Agricultural Mechanization,2014, 35(3):112-118.
[5]
邱白晶, 闫润, 马靖, 等. 变量喷雾技术研究进展分析[J]. 农业机械学报, 2015,46(3): 59-72.
Qiu Baijing, Yan Run, Ma Jing, et al. Analysis of the research progress of variable spraying technology [J]. "Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(3):59-72.
[6]
Brown D L, Giles D K, Oliver M N, et al.. Targeted spray technology to reduce pesticide in runoff from dormant orchards [J]. Crop Protection, 2008, 27(3): 545-552.
[7]
李寒. 基于机器视觉的目标检测在精细农业中的关键技术研究[D]. 北京:中国农业大学, 2014.
Li Han. Research on key technologies of target detection based on machine vision in precision agriculture [D]. Beijing: China Agricultural University, 2014.
[8]
胡天翔. 智能对靶喷雾机软件系统设计与集成研究[D].南京:南京林业大学, 2009.
Hu Tianxiang. Research on design and integration of software system of intelligent target sprayer [D]. Nanjing: Nanjing Forestry University, 2009.
[9]
李睿远. 车载超低容量喷雾机及其目标靶图像识别的研究[D]. 武汉:武汉理工大学, 2007.
Li Ruiyuan. Research on vehicle-mounted ultra-low-capacity sprayer and its target image recognition [D]. Wuhan: Wuhan University of Technology, 2007.
[10]
张俊雄, 曹峥勇, 耿长兴, 等. 温室精准对靶喷雾机器人研制[J]. 农业工程学报, 2009(S2):70-73.
Zhang Junxiong, Cao Zhengyong, Geng Changxing, et al. Development of greenhouse precise target spraying robot [J].Transactions of the Chinese Society of Agricultural Engineering, 2009(S2):70-73.
[11]
周鸣川. 脉宽调制(PWM)变量喷雾及视觉辅助对靶植保技术研究[D]. 杭州:浙江大学, 2015.
Zhou Mingchuan. Study on pulse width modulation (PWM) variable spray and vision-assisted plant protection technology for target [D]. Hangzhou: Zhejiang University, 2015.
[12]
丁为民,赵思琪,赵三琴,等.基于机器视觉的果树树冠体积测量方法研究[J].农业机械学报, 2016, 47(6): 1-10, 20.
Ding Weimin, Zhao Siqi, Zhao Sanqin, et al. Research on measurement method of fruit tree crown volume based on machine vision [J]. Transactions of the Chinese Society for Agricultural Machinery, 2016,47(6):1-10, 20.
[13]
Giles D, Downey D, Slaughter D. Liquid property and nozzle effects on flight time of pulsed jet spray [J]. Atomization amp; Sprays, 2004, 14(2): 111-126.
[14]
Mario F, Renina G. Agricultural robot radicchio harvesting [J]. Journal of Field Robotics, 2006, 23(6-7): 363-377.
[15]
Kang F, Wang H, Pierce F J, et al. Sucker detection of grapevines for targeted spray using optical sensors [J]. Transactions of the ASABE, 2012,55(5):2007-2014.
[16]
Calderón R, Montes-Borrego M, Landa B B, et al. Detection of downy mildew of opium poppy using high-resolution multi-spectral and thermal imagery acquired with an unmanned aerial vehicle [J]. Precision Agriculture, 2014, 15(6): 639-661.
[17]
Shalal N, Low T, McCarthy C, et al. Orchard mapping and mobile robot localisation using on-board camera and laser scanner data fusion-Part A: Tree detection [J]. Computers and Electronics in Agriculture, 2015,119: 254-266.
[18]
Shalal N, Low T, McCarthy C, et al. Orchard mapping and mobile robot localisation using on-board camera and laser scanner data fusion-Part B: Mapping and localisation [J]. Computers and Electronics in Agriculture, 2015, 119: 267-278.
[19]
Asaei H, Jafari A, Loghavi M. Site-specific orchard sprayer equipped with machine vision for chemical usage management [J]. Computers and Electronics in Agriculture, 2019, 162: 431-439.
猜你喜欢
小猕猴智力画刊(2023年4期)2023-10-10 10:00:33
今日农业(2022年1期)2022-11-16 21:20:05
今日农业(2022年13期)2022-09-15 01:17:58
河北果树(2021年4期)2021-12-02 01:15:12
今日农业(2020年23期)2020-12-15 03:48:26
电脑知识与技术(2016年28期)2016-12-21 12:13:14
科技视界(2016年26期)2016-12-17 17:31:58
科教导刊(2016年25期)2016-11-15 17:53:37
软件工程(2016年8期)2016-10-25 15:55:22
科技视界(2016年20期)2016-09-29 11:11:40