数字化技术在西南地区柑橘生产中应用分析
2025-01-19 00:00:00王微子马伟田志伟
中国农机化学报 2025年1期
关键词:柑橘


摘要:
西南地区是我国重要的柑橘产区,受地理环境影响,数字化农业发展缓慢,依旧以传统农业方式为主。为保障柑橘果实品质,需要对柑橘的生产过程进行精准调控,而数字化技术具有智能化水平高、节省人力、效率高等优势,可以科学调控柑橘生产。通过阅读大量文献和查阅相关统计资料,从田间管理、套袋采收等方面阐述西南地区柑橘生产现状,发现主要存在自动化程度低、资源浪费、自然灾害及病虫害风险感知力低,以及装备性能指标评估体系缺乏等问题。从数字化的角度对所存在的问题进行剖析,最后提出相应的解决方案以及对未来柑橘数字化生产的展望,为现代数字化果园建设、提高智能作业装备技术水平和构建果园标准化管理体系提出参考依据,为推动西南地区柑橘产业升级提供参考建议。
关键词:柑橘;农业数字化;果园管理;农业机器人;果园智能装备
中图分类号:S126
文献标识码:A
文章编号:2095-5553 (2025) 01-0338-08
Analysis on the application of digital technology in citrus production in Southwest China
Wang Weizi1, Ma Wei1, Tian Zhiwei1, 2
(1. "Institute of Urban Agriculture, Chinese Academy of Agricultural Sciences, Chengdu, 610213, China;
2. Chengdu National Agricultural Science and Technology Center, Chengdu, 610213, China)
Abstract:
The Southwest region is an important citrus producing area in China. Due to the influence of geographical environment, the development of digital agriculture is slow and still relies mainly on traditional agricultural methods. In order to ensure the quality of citrus fruits, precise regulation of the production process is necessary. Digital technology has the advantages of high intelligence, labor-saving, and high efficiency, which can scientifically regulate citrus production. Through reading a large amount of literature and consulting relevant statistical data, this article mainly elaborates on the current situation of citrus production in the Southwest region from the aspects of field management, bagging and harvesting. It is found that there are mainly problems such as low automation level, resource waste, low perception of natural disasters and pest risks, and a lack of equipment performance indicator evaluation system. From a digital perspective, this paper analyzes the existing problems and proposes corresponding solutions as well as prospects for future digital production of citrus. It provides reference for the construction of modern digital orchards, the improvement of intelligent operation equipment technology, and the construction of standardized management systems for orchards. It also provides reference suggestions for promoting the upgrading of citrus industry in the Southwest region.
Keywords:
citrus; agricultural digitization; orchard management; agricultural robots; orchard intelligent equipment
0"引言
柑橘(Citrus reticulata)是芸香科柑橘属的植物,是我国重要的经济作物之一。根据2023年国家统计数据,现有柑橘种植面积可达2 600khm2、年产量可达64 337.6kt,种植面积和产量位居世界前列,为农村经济发展做出巨大贡献,成为农民脱贫致富的支柱产业。近年来,柑橘生产模式逐渐向集中化、规模化的方向转变,形成以江西、湖北、广东、湖南、广西、浙江、福建、四川、重庆等地为主要产区的空间分布格局[1]。其中,四川、重庆是西南地区重要的柑橘产量大省,而四川省的柑橘产量和种植面积位居西南五省前列,同时也是2020年农业农村部、财政部批准建设的50个优势特色产业集群之一[2]。目前,四川省柑橘产业以成都、资阳、广安、泸州、眉山为主要种植区,不断向优势区域集中为西南柑橘产业做出了巨大贡献[3]。
西南地区柑橘种植面积可达700khm2,占我国柑橘总种植面积的27%左右。由于西南地区气候条件良好,物种多样,在柑橘生长中容易受到多种病虫害威胁,严重如黄龙病,传染率高,潜伏期长,影响柑橘产量;结果期为提高果实产量进行套袋工作,但易患绿斑病[4]等。柑橘产量的增加得益于柑橘种植面积的增加。然而,过于依赖这种“规模效应”说明我国的柑橘种植业仍处于发展中阶段,生产效率不高,管理方式落后,仍存在着极大的提升空间[5]。同时柑橘的快速扩增,产生价格下滑、耕地减少、果园面源污染等问题[1]。为更好地监测预测柑橘生长情况,解决因柑橘快速扩增所带来的问题,传统的田间管理技术与装备存在自动化程度低、人力成本高等缺点,无法高效地解决问题,而数字化技术具有智能化水平高、节省人力的优点,在解决因柑橘种植问题方面具有很高的潜在优势。
以数字化技术为基础,将传统农业逐渐转化为机器作业,进一步转化为自动作业,通过互联网可以远程监测农作物生长状态并对其进行预测从而达到充分利用人力资源、节约自然资源、提高农作物生产效率、保证农作物产品品质等目的是数字化农业的总目标。如今,我国柑橘栽培自动化程度低,效率不高,虽然二、三产业逐渐趋于饱和,但可以反哺促进第一产业的发展;随着城市化进程的脚步加快,农业用地以及从事农业活动的人越来越少,青壮年劳动力不愿进行传统农业工作,可用的人力资源越来越少。而数字化技术可节约大量的人力成本,因此发展数字化技术可以有效缓解我国用工紧张的问题。国外数字化农业发展较我国而言发展早起步稳,如今已趋于成熟;而我国农业数字化技术起步晚,但发展迅速,目前在施肥、施药、采摘果实方面研究已初见成效,逐渐从试验研究阶段过渡到实用阶段。本文主要阐述数字化技术在西南地区柑橘栽培中的应用现状和存在的问题,以及对未来发展趋势提出建议,以期为数字化果园推动提出借鉴与参考。
1"田间管理技术与装备
1.1"除草技术
西南地区降水充沛、全年温差较小,利于多种植物生长,植物种类丰富。因此,柑橘园内杂草较多,部分杂草影响柑橘植株吸收土壤养分,进而影响柑橘产量和品质。目前,我国果园除草主要采用人工除草、喷洒化学除草剂和机械割除等方式[6]。传统的果园除草技术以行间除草为主,但果树株间为非连续区域,选择机械除草方式难度较大。人工除草强度大,机械除草有一定难度,化学除草易有农药残留,因此研发多种前沿科学技术于一身的农田除草机器人,以完成农业生产任务为主要目的,在解决劳动力短缺、提高生产效率、减轻环境污染等方面发挥重要作用[7]。
1.1.1"基于数字化技术的化学除草
我国目前最流行的除草方式是化学除草,其优点是杂草枯死后覆盖于地表,利于保持果园水分、促进果树生长和土壤中蚯蚓及微生物的繁殖,价格低廉成本低,最常见的除草剂为草甘膦和百草枯[8]。
随着机械化水平的提高,数字化植保装备在程序设定和装备结构上进行高质量改良,提高化学除草效率。吕沐华等[9]研究并设计了一款果园喷药除草机器人并提出基于视觉的除草机器人系统,该机器人的履带式底盘可适用于复杂的果园地形环境,在视觉系统中结合超绿特征模型和图像数据处理方法可以有效地提取果园杂草图像且不易受果园光照条件的影响,喷药末端的执行机构可以实现精准作业,提高农药利用率,试验结果表明,该果园喷洒除草机器人在日光和夜间照明环境下的成功率均可达到80%以上,具有极高的实用价值。改良后的视觉识别技术在识别杂草方面正确率有显著提高,可自主识别杂草后进行除草作业,减少了重复作业次数和农药使用量,提高了果园除草效率。
长期使用同一款除草剂,虽然能消灭并抑制土壤微生物的活动和共生固氮作用,但是会造成土壤板结,降低土壤碳氧交换率,不利于果树根系呼吸,会影响到柑橘的果实品质和柑橘园内的生态环境[10]。为保护生态环境,可以对化学除草药剂进行改良,或者与机械除草方式相结合并引入数字化技术,合理调控除草药剂的用量。比如使用喷药效率高、用药安全系数高的植保无人机喷洒除草剂,岳德成等[11]在陇东利用植保无人机对玉米田进行了土壤处理除草剂的减量效应试验,结果表明,无人机喷施可减少除草剂使用,并对杂草有良好的控制效果,且对玉米的产量和性状的影响很小,具有极高的推广价值。大量施用除草剂,不但会破坏生态环境,还对农作物生长构成潜在威胁,而减量效应试验结果证明,植保无人机的使用可以有效减少农药的使用量,在一定程度上减少了农药对生态环境以及作物的伤害。
1.1.2"基于数字化技术的机械除草
传统的机械除草是人使用除草机械进行除草,果园除草机械大致分为两种,一种是果园微耕机,另一种是割草机。除草机械具有省时省力、操作简单和价格低廉的优点,但是在使用过程中会留下许多除草死角,仍然需要人工除草,同时微耕机还会对土壤进行破坏,不利于果树生长。
随着科学技术发展,除草机器人的诞生逐渐取代微耕机和割草机。西南地区多山地丘陵,赵智宇等[12]针对丘陵果园环境非结构化且复杂多变,常规的除草方式效率低等问题,设计了一种果园除草机器人底盘系统,根据田间试验结果表明,有效除草率在97%以上,可在25°斜面上正常行走,对导航路径的跟踪误差标准差为4.732cm,运动控制响应及时,能够提高除草作业安全性和准确性;智能果园为我国果园发展趋势,杨芳等从物联网角度出发,以除草机器人为监测对象,构建了除草机器人远程监控系统和软硬件平台框架,并设计了监测界面,与科学的监测管理制度完美融合,逐步向现代农业智能监测、远程控制和智能管理方向迈进;国外在数字化除草机器人的研究主要在机械方面,比如伊利诺伊大学所研发的五自由度串联机械臂设计的精确除草机器人和西班牙农业研究所研发的Delta机械臂智能除草机器人,从末端执行机构进行研究,所搭载的机械臂具有低功耗、高精度、高灵活性、高速度以及通用性强等特点,除草率均在85%以上[13]。
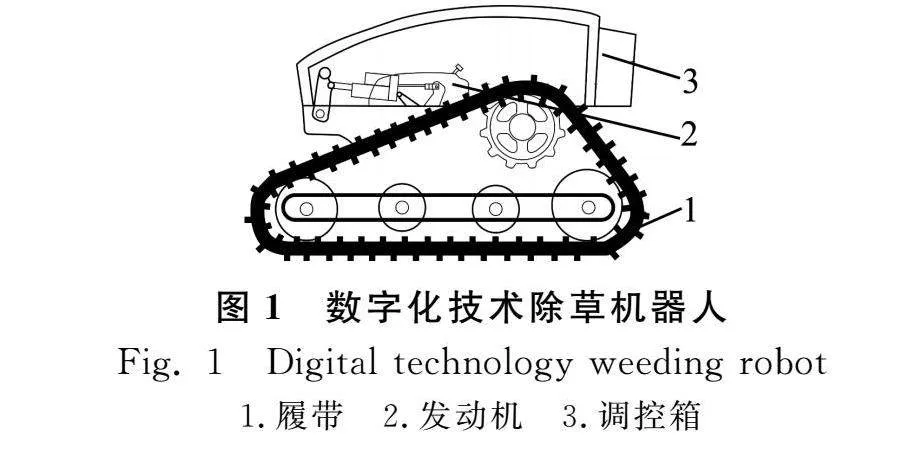
中国农业科学院都市农业研究所研发的4G-60型除草机器人(图1)主要用于丘区果园、草坪、林地等多种农田地形,在机械结构、稳定性和控制方法等方面进行创新设计,减少了机器人的转弯半径,增加爬坡能力,最大作业坡度可达30°,适合用于西南地形;此外还采用电驱动独立驱动技术,可以实现果园内灵活移动,除草更加彻底干净,并且可以远程操纵,有效确保人员安全。
1.履带"2.发动机"3.调控箱
机械除草只是对杂草进行简单的切割处理,目前仍需要人推助完成或使用遥控器进行除草作业,在一定程度上没有起到节省人工的作用;传统的化学除草技术虽然提高了除草效率,但所使用的农药剂量过大,浪费资源的同时还会造成土壤板结,不利于柑橘树生长,也没有达到理想的效果。随着机器视觉、作业装备的完善以及化学药剂的升级,诞生了数字化技术除草机器人,虽然造价较高,但是在一定程度上起到节省人工、节约资源、提高作业效率的作用,也为数字化施肥、施药技术的发展提供一定的参考。
1.2"数字化施肥技术及装备
作为施肥消费大国,我国农业施肥体系存在一定的缺陷,比如化肥结构投入不合理,为追求低成本,通常施用无机化肥,虽然价格低廉见效快,但会导致农作物吸肥率不高,进而增加化肥的投放量,也会造成土壤板结、环境污染等问题。
为解决以上问题,2012年,李勇等[14]根据耕地适宜性评价与施肥推荐研究为理论依据以金坛市小麦田为具体试验案例,构建了小麦适宜性评价模型,此模型具有选择小麦品种特征、对耕地土质进行分等定级的特点,在此基础上探讨了小麦数字化施肥技术,根据适宜性评价结果,结合小麦施肥参数,进行大田试验,并得出有效的施肥配比,以及因土壤质地不同制定施肥方案,有效提高施肥效率;2017年,有学者从保护性耕作技术发展、精准农业、精准施肥技术等角度出发,基于RIA体系结构以及多方位的数据处理软件,设计开发了具有信息查询、土壤肥力图表输出等功能的大田自动施肥数字化管理系统,并进行可视化管理和大田试验,取得了良好效果,对农业可持续发展意义重大,为数字化施肥作业奠定良好基础。
果园施肥作业与大田施肥作业有一定的相似性,因此在提高果园施肥作业效率上,可以参考大田智能化施肥作业,即可以从提高机械化水平和改善数字化程序入手。一些学者从机械化作业角度出发,研制出一种具有操作性良好、性能稳定,集开沟、施肥、搅拌、回填四种功能为一体的偏置式果园施肥机,其特点是可以完成开沟、搅拌、回填等联合作业并具备排肥器可精准排肥,满足果园施肥深度与宽度的要求,提高了果园装备机械化;针对目前果园种植管理过程中不能精准调控施肥浓度的问题,一些学者从改善程序出发,开发了一种集灌溉、可以动态调控施肥配方做到精准调整施肥浓度的多通道移动式果园灌溉施肥机,以西门子S7-1200PLC作为控制核心,可以自动按照设定的灌溉施肥方案进行控制,满足了不同果树植株在不同生长周期下的灌溉施肥需求;西南地区柑橘种植园地形以山地为主,为提高西南地区柑橘种植园施肥效率,谢灿[15]提出了一种适合丘陵山区果园作业环境,能够完成环状开沟、施肥、覆土联合作业的果园环状开沟施肥装置,对开沟施肥部件进行仿真分析,以对其结构和作业参数进行优化,满足了设计要求。
传统的施肥作业机具主要是从机械化的角度进行改良,提高了联合施肥作业能力,即同一机器可完成开沟、施肥、搅拌、回填四种功能,极大地提高了施肥效率,但是在肥药利用率方面,无法进行实际测量,会造成肥药量增高,易造成烧苗,造成果园减产。为科学地进行施肥作业,可以引入精准施肥调控系统,对施肥种类和用量进行测量调控,提高肥料利用率,减少不必要的浪费。
为更好地阐述数字化施肥系统,基于刘永华等[16]的智能灌溉施肥系统,提出柑橘园数字化施肥系统模型(图2)。利用数字化精准调控的优势与智能设施相结合,并设计远程故障检测系统,当设施发生故障,会出发报警系统,可以对设备进行第一时间检修。
1.3"数字化技术的病虫害管理
1.3.1"病虫害检测
在柑橘生长过程中,易生病害,常见的病害如黄龙病、炭蛆病等;害虫侵食,如红蜘蛛、木虱等,具有传染能力强,不易发现等特点。柑橘病虫害是影响其果实质量的重要原因,有些病虫害在柑橘栽培养护过程中存在潜伏期长、不易发现传染速度快等问题,极大的影响柑橘产量和质量。
传统的果园病虫害检测通常需要植物保护人员亲自到果园对果树进行查看,受到西南地区独特的地理环境影响,通常存在路途遥远颠簸、用时不准确、人力投入较大等问题;近些年,在针对果树病虫害防控方面开始引入数字化技术,随着“互联网+”概念的提出以及新媒体的发展,夏雪等[17]提出了基于云架构的果园病虫害监控系统并首先应用于苹果园中,该系统能实时监控果园内苹果树的整体生长状况和观测局部病虫害发生情况,将检测到的情况储存在云端,通过管道传递给用户端,工作人员可以远程查看果园病虫害情况,由于西南地区地形复杂,植保人员检测橘园病虫害信息较困难,需要大量的体力和时间成本,将此系统应用于西南地区柑橘园中可以有效节省人力。
病虫害检测最重要的技术点是机器人对病虫害的识别能力,能否提高预防柑橘病虫害的水平重点在于提高识别病体的科学技术,重中之重是提高机器的影像识别技术以及识别精度。2021年,万军杰等[18]为提高果树病虫害分级精度,更好地指导果园病虫害防治工作,结合迁移学习技术和GoogLeNet模型对25种果园作物6种病虫害的危害程度进行识别和分级,并基于MATLAB平台设计了视觉害虫识别分级系统,其结果表明可为现代果园智能化、精细化管理提供一定的技术支持;2022年,宋中山等[19]提出一种基于二值化的Faster R-CNN区域检测神经网络模型,此模型可以在自然条件下对柑橘叶片进行病虫害检测,对柑橘常见病虫害如黑斑病、溃疡病、黄龙病、疮痂病、健康叶片的平均准确率可以达到86%以上,总平均准确率可以达到87%以上,极大地提高了病虫害的识别效率;在柑橘病虫害防治工作中存在植保专业知识普及度不高、没有高效的病虫害诊断手段等问题,杜盼等[20]基于故障树分析法创建了柑橘病虫害诊断专家系统,用户通过此系统的病虫害模块和病虫害诊断模块能够快速诊断病虫害并获取具体的治疗方法,同时普及了专业的植物保护知识,提高了病虫害诊断手段。以上技术的建立需要采集大量的柑橘病虫害影像信息,然后对机器进行深度学习训练,最后基于网络技术,将所训练的结果植入到模型中或建立识别系统,才能在实际应用中检测到柑橘病虫害信息,提醒农户做好病虫害防治工作。
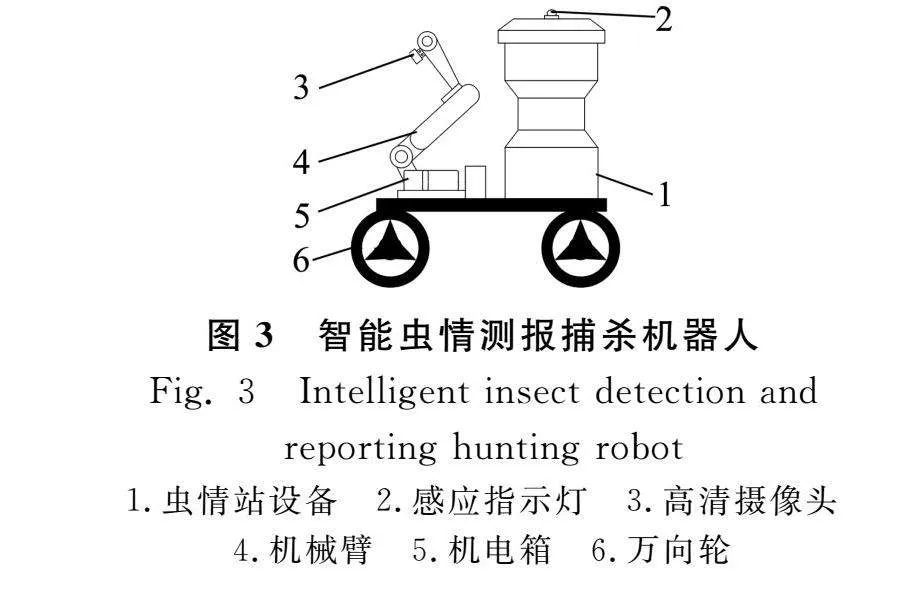
中国农业科学院团队研发了一种智能虫情测报捕杀机器人(图3),该机器人具有田间自主移动、路径规划和避障功能。通过灯光、性诱等物理诱捕方式,自动完成诱虫、杀虫、拍照、信息远程发布等作业,并实现虫情测报无人托管。搭载多种传感器,实现远程环境监测和虫害预测。装备虫情识别种类包括48种害虫,致死率99%、识别率大于98%。
1.3.2"病虫害防治
当检测到柑橘植株患有病害后,需要进行防治工作。比如在柑橘生长过程中黄龙病是发病率高传染力强的疾病之一,通过影响柑橘叶片的光合效率进而造成柑橘减产,此病害主要通过木虱传播,潜伏期长不易发现,通常情况下采用修剪病枝、喷洒农药等方式进行防控[21]。除黄龙病外,还会受到红蜘蛛和木虱等害虫的侵食,一般采用灯光防治和释放害虫天敌等方法进行防控或采用生物防控,比如利用松毛虫或赤眼蜂治理卷叶蛾等,或者使用农药和性诱导剂,但要进行科学配比[22]。
我国的病虫害防治手段以喷洒农药为主,虽然有一定的防治效果,可以控制住病情,但是容易产生抗药性,且防治效率远远落后于发达国家。目前国际主流精准喷洒技术为对靶喷药技术,而国内在农药喷施技术方面主要采用小型喷雾机具,使用粗放式的喷施方法,技术水平较低,目前在对靶喷药技术方面的大多数成果还停留在试验阶段,实用性不强,距离投入实际的农业生产还有一段时间[23]。为将精准喷洒技术投入实际生产之中,相关学者进行分级研究:2004年,王万章等[24]基于地图和传感器以及机器视觉和图像处理等三个方面综述了精确喷雾技术研究进展和实际应用效果;2017年,周良富等[25]针对果园变量喷雾所采用的传感技术、决策模型和所取得的技术指标方面论述了当前世界最典型的装备现状,以期为果园变量喷雾技术与装备研究提供参考;2022年,兰玉彬等[26]阐述了智能农药机器人的关键技术现状和发展趋势是精准变量施药、自主导航以及无人化作业,为数字化施药技术研究提供了新思路。传统的喷洒方式在效率和保护环境方面都不及精准喷洒技术,并且在西南地区,柑橘园内地形复杂,传统的喷药技术在病虫害防治方面需要大量的人力和机具成本,不利于发展现代化果园,但精准喷洒技术普及率低,需要一定的数字化智能装备成本略高,但是在分级研究的情况下,逐步从试验阶段进入到普及阶段,取代传统的农药喷施技术,提高病虫害防治效率。
国外一些发达国家率先研究了柑橘喷药技术,比如Torrent等[27]通过比较两种不同型号的喷嘴,即标准喷嘴和减径喷嘴,在柑橘园农药施用时的喷雾漂移潜力和田间喷雾漂移能力,试验结果表明减径喷嘴有效降低了漂移和农药沉积,在装备提升方面为数字化喷药技术发展奠定良好基础。为更好地发展数字化喷药技术,高效率的防治果园病虫害问题,可以借鉴一些国外的发展案例。
为更好地阐述数字化技术在病虫害检测防治方面的应用趋势,基于数字化病虫害管理应用场景,构建数字化柑橘园示意图(图4),总共分为两部分内容:监测系统和装备系统。监测系统可以检测土壤和空气中的温度湿度,土传、气传、生物传播的病虫害和杂草量,将信息通过互联网技术上传给管理员进行审核,然后启动装备系统进行喷药、割草、施肥等田间作业,做到数字化管控。
1.4"套袋及采摘装备研究
果实套袋具有提高果实外观品质、防止病虫害传播等功能,其材质对柑橘果实影响较大,乳白色单层纸袋能有效降低果实感染病虫害的概率,提高外观品质,增加商品价值,促进实现柑橘无公害生产。但目前,我国果实套袋以人工套袋为主,效率较低且果实形状容易发生改变。吕佳等[28]为解决套袋后柑橘的形状发生改变,增加了目标检测算法对套袋柑橘检测识别的难度,设计了一种精准度高速度快的SPM-YOLOv5算法模型,使模型更加关注形状改变的套袋柑橘,提高了柑橘套袋检测效率。套袋识别果实算法的研究是基于深度学习训练的基础上进行的,识别成功率越高,越能提高检测效率,且在柑橘套袋之后会进行采摘工作,有助于提高采摘的工作效率。
我国自动果实采摘技术取得了一定突破。自动果实采摘技术突破主要有成熟果实定点识别[29]、果实采摘路径[30]、机械臂避障[31]、采摘机械臂末端执行器[32]等方面。毕松等[29]针对在自然环境下柑橘果实采摘点的提取问题,使用卷积神经网络的柑橘识别方法提取柑橘采摘点并进行了试验验证,结果表明,该方法可在自然环境中识别柑橘果实并分割出有效识别区域,准确率均值可以达到86%以上;陈鑫等[30]为提高柑橘果实采摘效率,从采摘最优路径角度进行研究,建立柑橘果实点三维模型,在蚁群算法的基础上,引入随时间改变的自适应信息素浓度更新机制,并进行仿真试验,结果表明,蚁周模型为最优模型;马冀桐等[31]为了解决果实采摘机器人在工作作业过程中机械臂运动对障碍物的感知与避障问题,依据果树枝干特征进行分段标记,将枝干障碍物关键点进行三维建模,使样机避障成功率达到90%以上,平均规划时间小于2 s;魏博等[32]设计了通过三指充分抓握与偏转的融合控制的欠驱动式柑橘采摘末端执行器,此末端执行器具有仿真设计,通过调节三指之间的尺寸可实现对不同规格的柑橘果实进行稳定采摘,其结果表明采摘执行器针对直径为30~100mm的柑橘果实抓取成功率可以达到98%以上,且耗时短,具有适应性强、抓取稳定、不损伤果实等优点,可实现柑橘采摘智能化。以上自动化采摘技术提升主要是通过识别算法和对装备进行仿真设计,识别算法的提升有助于提高果实的正确率,仿真设计可以在节约人工的同时减少在采摘作业中对果实的伤害。
2"存在问题
2.1"自动化程度低
由于我国各方面仍处于发展中阶段,存在发展不平衡等问题。近些年,虽然我国农业自动化研究取得了一定的成果,但设备造价昂贵,未能推广普及;技术层面上与国外发达国家相比,我国的农业自动化仍处于初级阶段,在数字化和自动化结合方面仍有很大的发展空间。
2.2"环境资源利用率低
在柑橘园内进行除草、施肥、喷药作业时,为了让柑橘增产,管理者会多次施用大量的农药和肥料,施用量过多会影响到柑橘植株的生命力,灼烧柑橘植株造成减产,对果园环境而言造成污染,降低资源利用率。
2.3"数字化风险感知力低
柑橘在生长发育过程中,会受到多重因素影响,比如温度、降水、光照等因子。近些年,极端天气频发,昼夜温差过大、降水量过高过低、阳光灼热都会对柑橘造成高温灼伤低温冻害等物理化学伤害。目前的果园管理体系并没有感知风险的能力。预测极端天气并通知管理者提前做好应对措施,避免对柑橘生产造成严重损失。
2.4"数字化评估体系缺乏
数字化评估体系是通过科学的评价指标用于衡量、评价果园管理的质量的标准和方法。科学的数字化果园管理体系应该包含在果园生产的全过程中所用到的全部智能装备的标准,即从生长管理到采收果实都有严格的标准进行把控,并通过数字化的形式直观地呈现给管理者。目前,果园数字化装备性能指标评价标准依然存在空白,导致其应用推广存在难题。
3"展望
3.1"增加资金扶持,提高农业自动化水平
我国主要从事农业活动的人为文化水平较低的农民,推广地区政府可以组织相关的农业科普讲座,为种植户普及自动化种植技术,并申请相应的补贴,加快农业自动化普及。为农民进行专业培训,建立农业自动化试点。
3.2"促进学科融合研究,提高环境资源利用率
随着科技发展,传统的农业种植已不适应我国国情,需要对传统果园种植进行优化,以解决资源紧张、浪费严重等问题,同时需要科学的调控柑橘生长发育过程中不同的影响因子,将物联网技术与农业技术相结合,建立柑橘生长调节系统。比如针对柑橘在生长发育过程中易患病虫害等问题,林奕桐等[33]于2022年提出用无人机遥感技术对柑橘黄龙病植株识别,无人机也可以喷施农药,将病体识别与喷药技术结合,可以定点防治柑橘植株,有效提高了环境资源利用率。
3.3"鼓励跨部门合作,提高风险感知力
果园生产会受到多重因素的影响,而主要影响因素就是气象因子,为更加科学的对果园进行管理,提高果园抗风险的能力,可以将预警系统与气象站联系在一起,以便减少损失;除受极端天气影响外,柑橘病虫害具有不易发现、发现及晚期、传染力强等特点,极大地影响了风险感知能力,随着植物柔性传感器技术[34]发展成熟,在作物生长中的监测应用,如对植物电信号、挥发性化学物质、水分含量、生长速率的监测,以及对植物表面温度、湿度、照度等小气候的监测。可以将传感器与预警系统连接,及时反馈植物生长发育情况,进行实时监控,提高极端天气和病虫害的风险感知能力。
3.4"完善评价体系,建立数字化评估体系
构建科学的评估体系,是未来数字化果园发展的重要一环。科学的评估体系在柑橘生产过程中可以避免浪费和提高工作安全系数,比如无人机喷洒农药所产生的喷雾是经过人工计算的,但农药毕竟对人体有害,因此要对果园农药喷洒进行风险评估,预测树果园中空气喷射喷雾应用的喷雾漂移[35]。国外有使用案例,如在由加拿大农业和农业食品部HRDC和拉瓦尔大学联合开发的TheRCUPAIR,并在佛罗里达大学的柑橘园建造了一个由轴流风扇、上行空气和液体管道、液压喷嘴以及喷雾捕获和再循环系统组成的喷雾器,可有效减少柑橘应用中农药的浪费[36]。可以根据相关国外经验结合我国柑橘园的实际情况制定科学的数字化评估体系。
4"结语
柑橘已逐步成为我国重要的经济果树之一,具有高经济价值和良好的发展前景。数字化技术具有智能化水平高、节省人力、效率高等优势,且以人工智能、传感器和大数据的应用为代表的农业第四代革新浪潮正在席卷全球,可实现农业生产更精细化的管理、更有效的决策,更快地提升产业链中各环节的效率,也是未来农业的发展方向。柑橘在生长发育过程中,需要一定的养分环境才能保证其果实质量,传统的柑橘园管理技术和装备存在自动化程度低、资源浪费、自然灾害及病虫害风险感知力低以及装备性能指标评估体系缺乏等问题,引入数字化技术,在提升柑橘园自动化水平、提高资源利用率、增强风险感知力和建立评估体系方面具有重大意义,未来从加快传统农业转型、创建数字化果园系统、提高风险感知方法提升数字化果园建设,加快建设数字化技术柑橘示范园区,从而起到良好的示范带头作用,推动西南地区柑橘产业的升级。
为促进西南地区柑橘产业实现智能化生产,未来的主要研究内容和方向应以西南地区柑橘生产现状为研究基础,结合物联网技术、传感器技术以及装备技术多种技术建立数字化柑橘园示范点,夯实研发基础,进行推广试验,促进柑橘产业生产全面升级,实现柑橘生产的全程自动化。
参"考"文"献
[1]
董秀春, 蒋怡, 杨玉婷, 等. 基于语义分割模型和遥感的柑橘园空间信息提取[J]. 中国农机化学报, 2023, 44(1): 178-184.
Dong Xiuchun, Jiang Yi, Yang Yuting, et al. Spatial information extraction of citrus orchard based on semantic segmentation model and remote sensing [J]. Journal of Chinese Agriculture Mechanization, 2023, 44(1): 178-184.
[2]
汪君, 杜兴端. 四川柑橘产业发展形势与建议[J]. 四川农业科技, 2022(7): 62-65, 69.
[3]
田楠坤. 全国及四川省柑橘生产现状及未来发展预测[J]. 粮食科技与经济, 2019, 44(7): 129-131.
[4]
田福敏, 张绍彬, 罗涛, 等. 套袋对柑橘果面绿斑病及果实品质的影响[J]. 贵州农业科学, 2018, 46(1): 33-35.
Tian Fumin, Zhang Shaobin, Luo Tao, et al. Effects of different bagging patterns on green spot disease and fruit quality of citrus [J]. Guizhou Agricultural Sciences, 2018, 46(1): 33-35.
[5]
朱其菊. 中国柑橘生产效率研究[D]. 武汉: 中南财经政法大学, 2020.
[6]
周炎, 路丹, 黄太庆, 等. 不同除草方式对柑橘叶片矿质营养含量及果实品质的影响[J]. 热带农业科学, 2021, 41(11): 13-17.
Zhou Yan, Lu Dan, Huang Taiqing, et al. Effects of different weeding methods on leaf contents of mineral nutrients and fruit quality of citrus [J]. Chinese Journal of Tropical Agriculture, 2021, 41(11): 13-17.
[7]
邢钦淞, 丁素明, 薛新宇, 等. 智能田间除草机器人发展现状研究[J]. 中国农机化学报, 2022, 43(8): 173-181.
Xing Qinsong, Ding Suming, Xue Xinyu, et al. Research on the development status of intelligent field weeding robot [J]. Journal of Chinese Agricultural Mechanization, 2022, 43(8): 173-181.
[8]
张改运. 果园不同控草除草方法及其利弊分析[J]. 西北园艺(果树), 2014(1): 6-7.
[9]
吕沐华, 丁珠玉. 基于机器视觉的果园喷药除草机器人视觉系统设计[J]. 中国农机化学报, 2021, 42(5): 42-48.
Lü Muhua, Ding Zhuyu. Design of visual systems for orchard spraying weeding robot based on machine vision [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(5): 42-48.
[10]
姚和金, 金宗来, 杨伟斌, 等. 不同除草方式对浙西南柑橘园杂草群落及其多样性的影响[J]. 应用生态学报, 2010, 21(1): 23-28.
Yao Hejin, Jin Zonglai, Yang Weibin, et al. Effects of weeding methods on weed community and its diversity in a citrus orchard in southwest Zhejiang [J]. Chinese Journal of Applied Ecology, 2010, 21(1): 23-28.
[11]
岳德成, 姜延军, 李青梅, 等. 植保无人机喷施对玉米田土壤处理除草剂的减量效应[J]. 植物保护, 2019, 45(2): 193-198.
Yue Decheng, Jiang Yanjun, Li Qingmei, et al. Decrement effect of plant-protection UAVspraying on soil-applied herbicides in maize field [J]. Plant Protection, 2019, 45(2): 193-198.
[12]
赵智宇, 朱立成, 周利明, 等. 丘陵果园除草机器人底盘系统设计与试验[J]. 农业机械学报, 2022, 53(S1): 48-57.
Zhao Zhiyu, Zhu Licheng, Zhou Liming, et al. Design and experiment of chassis control system for weeding robot in hilly orchard [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(S1): 48-57.
[13]
胡炼, 刘海龙, 何杰, 等. 智能除草机器人研究现状与展望[J]. 华南农业大学学报, 2023, 44(1): 34-42.
Hu Lian, Liu Hailong, He Jie, et al. Research progress and prospect of intelligent weeding robot [J]. Journal of South China Agricultural University, 2023, 44(1): 34-42.
[14]
李勇, 邱淑芬, 朱荣松. 耕地适宜性评价与施肥推荐研究——以金坛市小麦为例[J]. 中国土壤与肥料, 2012(5): 61-66.
Li Yong, Qiu Shufen, Zhu Rongsong. Cultivated land suitability evaluation and fertilization: An example of wheat from the Jintan region [J]. Soil and Fertilizer Sciences in China, 2012(5): 61-66.
[15]
谢灿. 山地果园环状开沟施肥装置的研究[D]. 重庆:西南大学, 2022.
Xie Can. Study of circular trenching and fertilizing device in mountain orchards [D]. Master Dissertation of Southwest University, 2022.
[16]
刘永华, 俞卫东, 沈明霞, 等. 智能化精准灌溉施肥技术研究现状与展望[J]. 江苏农业科学, 2014, 42(8): 384-387.
Liu Yonghua, Yu Weidong, Shen Mingxia, et al. Research status and prospects of intelligent precision irrigation and fertilization technology[J]. Jiangsu Agricultural Sciences, 2014, 42(8): 384-387.
[17]
夏雪, 丘耘, 胡林, 等. 云视频监控在苹果园病虫害防治中的应用[J]. 江苏农业科学, 2015, 43(12): 465-468.
Xia Xue, Qiu Yun, Hu Lin, et al. Application of cloud video surveillance in the prevention and control of diseases and pests in apple orchards [J]. Jiangsu Agricultural Sciences, 2015, 43(12): 465-468.
[18]
万军杰, 祁力钧, 卢中奥, 等. 基于迁移学习的GoogLeNet果园病虫害识别与分级[J]. 中国农业大学学报, 2021, 26(11): 209-221.
Wan Junjie, Qi Lijun, Lu Zhongao, et al. Recognition and grading of diseases and pests in orchard by GoogLeNet based on Transfer Learning [J]. Journal of China Agricultural University, 2021, 26(11): 209-221.
[19]
宋中山, 汪进, 郑禄, 等. 基于二值化的Faster R-CNN柑橘病虫害识别研究[J]. 中国农机化学报, 2022, 43(6): 150-158.
Song Zhongshan, Wang Jin, Zheng Lu, et al. Research on citrus pest identification based on Binary Faster R-CNN [J]. Journal of Chinese Agricultural Mechanization, 2022, 43(6): 150-158.
[20]
杜盼, 孙道宗, 李震, 等. 基于故障树分析法的柑橘病虫害诊断专家系统[J]. 华南农业大学学报, 2022, 43(4): 106-112.
Du Pan, Sun Daozong, Li Zhen, et al. An expert system for diagnosing citrus diseases and pests based on fault tree analysis [J]. Journal of South China Agricultural University, 2022, 43(4): 106-112.
[21]
梁植源, 范健文, 林贤坤, 等. 柑橘园施药关键技术及机械研究进展[J]. 农业技术与装备, 2021(10): 48-52.
[22]
李艳梅. 柑橘病虫害绿色防治技术[J]. 黑龙江粮食, 2021(9): 97-98.
[23]
曹中华, 崔晋波, 湛小梅, 等. 柑橘无人对靶施药关键技术研究[J]. 南方农机, 2021, 52(6): 58-59.
[24]
王万章, 洪添胜, 李捷, 等. 果树农药精确喷雾技术[J]. 农业工程学报, 2004(6): 98-101.
Wang Wanzhang, Hong Tiansheng, Li Jie, et al. Review of the pesticide precision orchard spraying technologies [J]. Transactions of the Chinese Society of Agricultural Engineering, 2004(6): 98-101.
[25]
周良富, 薛新宇, 周立新, 等. 果园变量喷雾技术研究现状与前景分析[J]. 农业工程学报, 2017, 33(23): 80-92.
Zhou Liangfu, Xue Xinyu, Zhou Lixin, et al. Research situation and progress analysis on orchard variable rate spraying technology [J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(23): 80-92.
[26]
兰玉彬, 闫瑜, 王宝聚, 等. 智能施药机器人关键技术研究现状及发展趋势[J]. 农业工程学报, 2022, 38(20): 30-40.
Lan Yubin, Yan Yu, Wang Baoju, et al. Current status and future development of the key technologies for intelligent pesticide spraying robots [J]. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38(20): 30-40.
[27]
Torrent X, Garcerá C, Moltó E, et al. Comparison between standard and drift reducing nozzles for pesticide application in citrus: Part I. Effects on wind tunnel and field spray drift [J]. Crop Protection, 2017, 96.
[28]
吕佳, 李帅军, 曾梦瑶, 等. 基于半监督SPM-YOLOv5的套袋柑橘检测算法[J]. 农业工程学报, 2022, 38(18): 204-211.
Lü Jia, Li Shuaijun, Zeng Mengyao, et al. Detecting bagged citrus using a Semi-Supervised SPM-YOLOv5 [J]. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38(18): 204-211.
[29]
毕松, 张潞. 自然环境下的柑橘采摘点识别方法研究[J]. 计算机仿真, 2021, 38(12): 227-231.
[30]
陈鑫, 王海宝, 罗强. 基于改进蚁群算法的柑橘采摘最优路径[J]. 安徽大学学报(自然科学版), 2022, 46(1): 68-74.
Chen Xin, Wang Haibao,Luo Qiang. Optimal path of Citrus sinensis L. picking based on improved ant colony algorithm [J]. Journal of Anhui University (Natural Science Edition), 2022, 46(1): 68-74.
[31]
马冀桐, 许洪斌, 王毅. 基于三维重建的柑橘采摘机械臂避障研究与实验[J]. 中国农业科技导报, 2020, 22(7): 90-98.
Ma Jitong, Xu Hongbin, Wang Yi. Research and experiment on obstacle avoidance of citrus harvesting robot arm based on 3D reconstruction [J]. Journal of Agricultural Science and Technology, 2020, 22(7): 90-98.
[32]
魏博, 何金银, 石阳, 等. 欠驱动式柑橘采摘末端执行器设计与试验[J]. 农业机械学报, 2021, 52(10): 120-128.
Wei Bo, He Jinyin, Shi Yang, et al. Design and experiment of underactuated end-effector for citrus picking [J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(10): 120-128.
[33]
林奕桐, 梁健, 刘书田, 等. 基于无人机可见光通道及支持向量机模型的柑橘黄龙病个体识别方法[J]. 西南农业学报, 2022, 35(11): 2554-2563.
Lin Yitong, Liang Jian, Liu Shutian, et al. Individual identification method of citrus Huanglongbing based on UAV visible light channel and support vector machine model [J]. Southwest China Journal of Agricultural Sciences, 2022, 35(11): 2554-2563.
[34]
渠纯纯, 孙文秀, 李臻, 等. 植物柔性传感器研究进展与展望[J]. 农业工程学报, 2023, 39(8): 32-43.
Qu Chunchun, Sun Wenxiu, Li Zhen, et al. Research progress and prospects of the plant flexible sensors [J]. Transactions of the Chinese Society of Agricultural Engineering, 2023, 39(8): 32-43.
[35]
Rathnayake A P, Khot L R, Hoheisel G A, et al. Downwind spray drift assessment for airblast sprayer applications in a modern apple orchard system [J]. Transactions of the ASABE, 2021, 64(2): 601-613.
[36]
Thériault R, Salyani M, Panneton B. Development of a recycling sprayer for efficient orchard pesticide application [J]. Applied Engineering in Agriculture, 2001, 17(2): 143.
猜你喜欢
基层中医药(2021年10期)2021-06-05 07:15:28
湖南农业(2017年1期)2017-03-20 14:04:46
中国老区建设(2016年3期)2017-01-15 13:53:22
湖南农业(2016年3期)2016-06-05 09:37:35
浙江柑橘(2016年4期)2016-03-11 20:12:59
浙江柑橘(2016年2期)2016-03-11 20:12:42
浙江柑橘(2016年1期)2016-03-11 20:12:37
发明与创新(2015年1期)2015-02-27 10:38:21
湖南农业(2015年5期)2015-02-26 07:32:39
湖南农业(2015年5期)2015-02-26 07:32:37