
机器人实践课程任务驱动教学探索
2025-01-10 00:00:00苑得鑫赵玉明李雪琴靳纪军
物联网技术 2025年1期



摘 要:从“新工科”建设要求出发,针对以往机器人实践教学中存在的教学内容碎片化、教学方式原始化、考核评价形式单一化等问题,引入任务驱动教学模式进行教学改革探索。以“初级机器人技术与实践”课程为例,通过设计结合行业特色的层次化实践任务科目,开展以学生为中心的任务实施方式,建立多元立体的任务评价机制,构建师生融通的持续改进模式,不断提升课程教学成效。实践表明,任务驱动教学模式能够激发学生的学习热情,促进学生综合实践能力和创新能力的提升。
关键词:任务驱动;教学改革;AGV机器人;实践教学;评价体系;“新工科”
中图分类号:TP242;G420 文献标识码:A 文章编号:2095-1302(2025)01-0-03
0 引 言
随着新一轮科技革命和产业变革的不断深化,对具备综合素质和创新能力的工程技术人才培养提出了更高要求。深化高等工程教育改革,全力推进新工科建设,是提升工程技术人才培养质量的必由之路[1]。
机器人技术融合了机械、电气、控制、传感、计算机、人工智能等多种技术,既是典型的新工科学科,又是传统学科工程教育改革的重要支撑[2]。当前,机器人技术在国民经济及社会生活的各个领域中应用得越来越广泛,是各国战略布局发展的主要方向之一。越来越多的高校开设了机器人相关专业或课程,在不同领域、不同层级的机器人技术人才培养方面积累了许多宝贵经验。中国石油大学(华东)石油工业训练中心立足实践教学,结合行业特色,以轮式机器人、足式机器人、机器鱼和NAO机器人为平台,面向全校学生开设了4门机器人实践类公选课,满足相关专业学生开展机器人基础训练、综合实践、创新研究、学科竞赛等需求,同时为行业特色专业学生提供了了解机器人技术、扩展创新视野、发掘创新潜力的宝贵机会。
本文以“初级机器人技术与实践”课程为例,分析行业特色大学在机器人实践课程教学中存在的问题,并引入任务驱动教学模式,对机器人实践教学进行改革与探索。
1 实践教学问题分析
“初级机器人技术与实践”是我校开设的一门机器人实践类公选课,主要面向机器人相关专业低年级学生及行业特色专业的学生,在提高学生学习兴趣、教授机器人基本知识、训练学生动手实践能力和创新意识方面发挥了积极作用。然而,通过问卷调查和学生座谈,发现课程教学仍存在一些问题:
(1)教学内容碎片化。该课程以实践为主,涉及机械、电气、控制、软件等众多方面的知识点,学生难以建立起系统的知识体系,且实践项目多为验证性实验,学生学习热情不高。
(2)教学方式原始化。实践教学过程仍以教师为中心,较复杂的实践项目往往在教师的全程指挥下完成,学生主动探索的积极性不强。
(3)考核评价形式单一化。仅凭简单的验证性实验结果难以反映学生真实的学习效果,考核形式对学生的激励作用不明显。
(4)部分公选课班级的学生组成以行业特色专业学生为主,机器人技术基础相对薄弱,缺乏针对性的教学内容、教学方式和考核评价机制,导致学生学习难度较大,学习兴趣降低。
针对以上问题,课程教学团队根据“新工科”建设理念及要求,引入任务驱动教学模式,通过实践任务优化设计、教学方式和考核机制变革、持续改进模式构建等一系列举措,对提升课程教学质量进行了深入探索与实践。
2 任务驱动教学总体思路
任务驱动教学是一种以建构主义学习理论和实用主义教育理论为基础的教学方法,以“任务”作为教学目标的具象化载体,以学生为主体,以教师为主导,将传统的知识传授型教学转变为问题解决型教学[3-5],是“新工科”理念下实践教学的一种有效模式。
任务驱动教学包括4个环节:任务设计、任务实施、任务评价和持续改进[6]。任务驱动教学的具体流程如图1所示。
(1)任务设计:该环节应在课程开始前进行,教师根据教学目标,结合教学内容和实践平台,对整门课程涉及的实践任务进行总体规划,分层次设计能够辅助教学目标达成、涵盖较多知识点、具有实用性和趣味性的实践任务科目,并对任务实施过程进行模拟和评估,以确保实施的可行性;
(2)任务实施:该环节是实践教学的核心环节,应以学生为主体,对实践任务进行自主分析、讨论,提出解决方案并付诸实施,训练学生分析、处理复杂工程问题的能力[7]。
(3)任务评价:该环节是对学生实践任务完成效果进行考评,应以促进学生学习为目的,建立全过程、多元化的评价机制,避免“一刀切”式考核。
(4)持续改进:该环节在课程结束后进行,教师与学生共同探讨,深入分析任务设计、实施存在的问题,不断优化课程教学内容和模式。
3 任务驱动教学设计
从课程特点及存在问题出发,以新工科建设理念为指导,引入任务驱动的教学模式,结合行业特色,对本校“初级机器人技术与实践”课程进行改革探索。
3.1 层级递进的任务设计
为解决该课程知识点“碎片化”的问题,重新梳理课程知识点,使其成为连贯的知识体系,打通学生知识关联的“堵点”。通过重构与深化原有实验项目、开发与拓展新实验项目等方式,按照“认知-综合-创新”的能力层次设计了10个实践任务科目,见表1。实践任务覆盖了该课程大纲中90%以上的知识点,使学生在完成项目的同时,能够将原本“碎片化”的理论知识融会贯通。
认知层实践重在强化学生对机器人基本原理的理解,培养其基本的开发技能;综合层实践引入各类传感器,结合与生产生活相关的实际情景,逐步提升学生的机器人设计、开发与调试能力;创新层实践结合了行业特色,布置了石油站场智能探测自动导航小车(Automated Guided Vehicle, AGV)设计任务,要求学生通过前序课程学习,综合运用所学知识,设计出具备自动巡航、避障报警、温度(或有毒有害气体体积分数、火情)探测及处理等功能的AGV机器人[8-9]。通过构建具有行业特色的实践情景,有效激发了学生的学习热情。
为满足实践任务情景构建需求,选用Boe-Bot机器人套件作为实践教学平台,平台主要包括控制、驱动、机械、传感等模块,如图2所示。
教学平台的微控制器选用STM32F103C8T6单片机,其内核为32位ARM Cortex-M3处理器,时钟频率达72 MHz,具有高性能、低功耗、高集成度、高灵活性等特点[10]。该单片机具有丰富的外设接口,支持多种编程方式,便于学生开发和调试,可支持多种传感器,满足个性化功能需求。此外,该单片机具有完善的用户生态,适合学生自学和课外拓展学习。
3.2 以学生为中心的任务实施
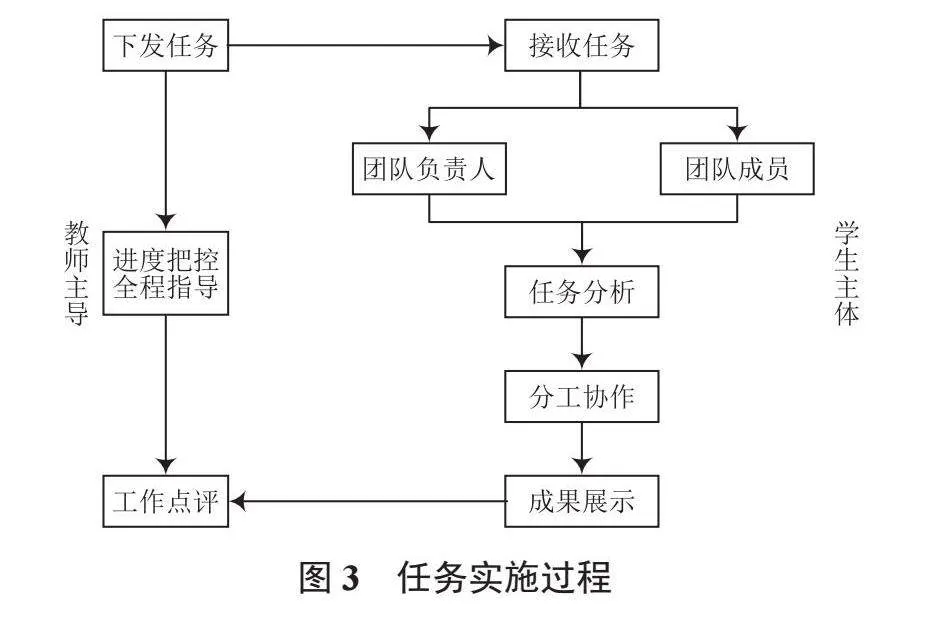
该项目贯彻以学生为中心的“新工科”教育理念,任务实施过程如图3所示。任务实施通常以团队为单位,任务实施时,每个团队推选一位负责人,负责任务协调与分工;团队成员在分析、讨论任务要求后,制定总体方案,并按分工开展硬件搭建、电路设计、程序开发等具体工作。团队负责人需把控本团队任务实施进度,协调、解决实施过程中遇到的问题。教师发挥主导作用,把控任务实施总体进度并给予必要指导。
3.3 多元立体的任务评价
任务评价体系一方面应真实反映学生对知识、技能的掌握情况,另一方面应能够激励学生在重要知识、技能的学习上投入更大精力。该课程的任务评价环节分为3个方面:一是对任务完成结果与任务要求的契合度进行评价,主要采取学生演示和教师评价的方式进行;二是对团队合作情况进行评价,由团队负责人依据团队成员的实际表现进行评价,而团队负责人的成绩则取团队成员打分的平均值;三是对实训报告进行评价,实训报告的内容涵盖实训方案设计、实训过程总结、知识点总结和反思提升部分,教师据此来评估学生对实训任务所涉及知识、技能的理解与掌握情况[11]。
3.4 师生融通的持续改进
在课程教学任务完成后,教师组织学生座谈,了解学生对课程教学的直观感受,发放调查问卷,征询学生对实践任务及课程教学的改进建议。教学团队深入分析学生建议,对实践任务的内容、实施方式、评价方式进行持续优化,不断积累教学实践经验,提升课堂教学效果。经过多轮任务驱动教学实践,学生成绩优秀率有了较大提升,反映出该教学模式对提高学生的创新实践能力具有促进作用。
4 结 语
基于“新工科”建设要求,针对行业特色大学的学生特点及机器人实践教学内容、教学方式、考核方式等方面存在的问题,引入任务驱动教学模式,对“初级机器人技术与实践”课程进行系统化的改革探索,形成了层级递进的实践任务科目设计、以学生为中心的任务实施方式、多元立体的任务评价机制和师生融通的持续改进模式等经验做法。教学实践表明:任务驱动教学模式能够激发学生的学习兴趣,提升学生的综合实践和创新能力。
注:本文通讯作者为赵玉明。
参考文献
[1]殷婷婷,杨忠,徐楠,等.新工科背景下物联网工程专业嵌入式系统课程教学探索[J].物联网技术,2022,12(12):139-141.
[2]雷静桃,刘亮,张海洪.“机器人学”课程教学改革与实践[J].实验室研究与探索,2013,32(5):179-182.
[3]王甜,李霄,李晓芳,等.新工科背景下物联网工程课程建设探索与实践——以“物联网工程规划与设计”课程为例[J].物联网技术,2023,13(9):151-155.
[4]胡纯意,李建辉,胡纯蓉,等.基于OBE理念的翻转课堂教学模式的构建——以“微机原理与接口技术”课程为例[J].物联网技术,2023,13(8):159-162.
[5]张显才,崔晶晶,张雪.“金课”背景下“电路分析基础”课程建设研究[J].物联网技术,2023,13(8):147-150.
[6]朱亚玲,徐瑾,王娟,等.任务驱动教学法对于培养工科大学生计算思维的应用研究[J].创新创业理论研究与实践,2023,6(19):174-176.
[7]蓝红莉,王晓荣,周晓辉.融合PDCA理论的任务驱动实践教学模式研究与实施[J].实验室研究与探索,2021,40(7):200-204.
[8]高玉健,胡立夫,王海明,等.化工厂智能巡检机器人系统设计[J].工业仪表与自动化装置,2020(3):55-59.
[9]周健,徐志国.基于STM32的智能循迹机器人的设计[J].集成电路应用,2020,37(2):45-47.
[10]张佳琪,于海霞,刘永辉,等. STM32单片机控制的智能垃圾分类终端[J].物联网技术,2023,13(1):82-84.
[11]吴凌天,吴金男,朱益波,等. 工程教育专业认证背景下生物工程项目实践创新课程建设的逻辑与实践[J]. 生物工程学报, 2021,37(12):4455-4464.
猜你喜欢
计算机教育(2017年8期)2017-09-01 15:00:02
科技视界(2017年10期)2017-08-21 07:51:35
电脑知识与技术(2017年16期)2017-07-14 15:42:16
职业(2016年10期)2016-10-20 22:18:22
职业(2016年10期)2016-10-20 22:00:12
商业会计(2016年13期)2016-10-20 15:32:16
电脑知识与技术(2016年21期)2016-10-18 22:33:44
考试周刊(2016年76期)2016-10-09 09:06:52
成才之路(2016年25期)2016-10-08 10:23:55
科技视界(2016年20期)2016-09-29 14:08:22
