改进关键链法在重卡换电站施工进度中的研究
2024-12-31 00:00:00刘威朱雨佳周颖赵林姣韩利红
项目管理技术 2024年11期




















摘要:重卡换电站项目具有土建与电气工序交叉并行、各类技术接口高度整合及人材机资源密集消耗的特点,而传统的关键路径法未能充分考虑资源约束,进度计划和控制易出现负偏差,进而引发项目延期问题,提出一种改进的关键链法。采用序偶亏值定理和重心定理,结合资源约束优化关键链识别;结合工序安全时间、工序位置权数和风险偏好度优化缓冲区设置;实施三色缓冲区动态监控及采取积极应对措施。在某重卡换电站项目进度控制中应用该方法,将工期从82d缩短到73~75.4d。通过蒙特卡洛模拟和敏感度分析,验证应用改进关键链法优化进度计划具有科学性和精确性,有利于提高进度管理成效。
关键词:关键链法;重卡换电站;进度优化;蒙特卡洛验证
0 引言
在短途高频运输场景中,换电重卡的经济和环保效益日益显著[1]。2023年,我国新增换电站1594座,显示出市场对高效、清洁运输解决方案的迫切需求。重卡换电站的建设是一个涉及土木工程和电气系统的复杂项目。在整个项目实施过程中,土木基础工程不仅要满足电力工程的施工标准,还要预留足够的空间以适应后期电气设备的安装和定位要求。核心设备桁架换电机器人和电池架载充电机的安装与调试需要与外壳系统、站控系统和供配电系统的安装进度紧密配合。
目前,被广泛使用的关键路径法未能充分考虑资源约束[2],不能确保重卡换电站施工过程中不同工序之间的紧密衔接和技术接口的有效整合,也不能有效分配人材机资源,导致施工进度计划与实际控制易出现负偏差,最终引发项目延期。
Goldratt于1997年提出关键链法,通过识别关键链路、设立缓冲区并对其监控,为项目进度管理带来创新[3]。该方法不仅考虑了工序间的逻辑关系,还重视资源的约束,弥补了传统关键路径法的不足。关键链法在建筑工程[4]、大型客机停机维护[5]和塑料管道开发项目[6]等不同项目的应用中已证实了其有效性。国内学者基于剪贴粘贴法[7]和根方差法[8],对缓冲区的优化与监控展开了深入研究,进一步压缩了工序时间裕度[9],有效提升了软件开发[10]、管理信息系统[11]和自动化码头不同设备协调[12]的完工率。尽管关键链法显示出巨大优势,但其应用效果依赖于对研究对象的深入研究和适应性调整。
目前,国内学者多关注重卡换电站的技术[13]、调度[14]等方面的研究,在进度管理及优化结果验证等方面研究较少。对重卡换电站的进度管理进行深入研究,对提高工程建设效率和推动重卡电动化进程具有重要意义。
针对重卡换电站建设过程中的特点和可能存在的项目延期问题,本文提出一种改进的关键链法。该方法在关键路径法的基础上,利用序偶亏值定理和重心定理准确识别关键链,并结合工序安全时间、工序位置权数和风险偏好度等关键因素合理设置缓冲区,通过调整缓冲区三色比例(绿20%、黄30%、红50%)和采取更主动的缓冲区资源使用措施,保证项目施工进度按计划推进。此外,使用Crystal Ball软件中蒙特卡洛Beta分布模拟,对优化方案进行验证和量化分析,确保方案的可行性和科学性。本研究成果不仅可拓展关键链法的应用,还可为类似工程的施工进度管理提供有益参考。
1 改进关键链法
对关键链法的改进具体涵盖关键链识别优化、缓冲区设置优化及缓冲区动态监控三个核心组成部分。
1.1 关键链识别优化
在项目施工进度管理中,传统的关键路径法未能充分考虑资源约束,特别是在关键工序与多个非关键工序并行施工时,资源竞争可能导致施工工期延误和关键路径顺序变化,影响工程施工进度控制。为克服上述问题,本文在关键路径法的基础上引入重心定理和序偶亏值定理[15],结合资源约束对工序顺序进行优化,以便准确识别关键链。
1.1.1 重心定理
在项目网络图中,将工序i最早开始时间(Early Start Time,ES)与最晚结束时间(Latest Finish Time,LF)相加可得工序i的重心,公式如下[15]
Gi=ESi+LFi(1)
式中,Gi为工序i重心;ESi为工序i最早开始时间;LFi为工序i最晚结束时间。
通过比较并行工序的重心确定工序执行顺序,优先执行重心较小的工序以最小化序偶亏值,优化整体工期,公式如下[15]
[A,B]-[B,A]
=(EFA+LSA)-(EFB+LSB)
=GA-GB(2)
式中,EFA为工序A最早结束时间;LSA为工序A最晚开始时间;EFB为工序B最早结束时间;LSB为工序B最晚开始时间;GA为工序A重心;GB为工序B重心。
如果GAlt;GB,则顺序为工序A→工序B,对工期影响最小;如果GAgt;GB,则顺序为工序B→工序A,对工期影响最小。
1.1.2 序偶亏值定理
并行工序A和工序B顺序调整,对工期的影响称为序偶亏值LAB,公式如下[15]
LAB=Max(0,EFA-LSB)(3)
式中,EFA为工序A最早结束时间;LSB为工序B最晚开始时间。
如果LABgt;0,则工期延长LAB天;如果LAB=0,则工期不变;如果LABlt;0,则工期不延长,且有LAB天的缓冲时间。
1.2 缓冲区设置优化
随着工程施工进度持续推进,紧前工序累积的偏差和不确定性可能对后续工序构成威胁,从而影响整个项目的工期。为应对这一挑战,本文基于褚时超[16]提出的综合法,结合重卡换电站项目特点,提出一种创新的缓冲区优化设置方法。该方法考虑了工序安全时间、工序位置权数、风险偏好度三个关键因素,以便更准确地评估各个工序的不确定性。具体计算方法如下。
1.2.1 工序安全时间di
结合项目现场施工人员(PW),现场经理(PM)和项目总监(PD),预估各个工序的时间,计算工序i的折减系数ki,公式如下[17]
ki=PMi-PWiPDi-PWi(4)
式中,ki为工序i的折减系数;PMi为项目现场经理对工序i估计时间;PWi为项目现场施工人员对工序i估计时间;PDi为项目总监对工序i估计时间。
根据式(4)得出工序i的折减系数,据此推出工序i的安全时间di,公式如下[17]
di=Di(1-ki)(5)
式中,di为工序i安全时间;Di为工序i原时长。
1.2.2 工序位置权数qi
根据工序i所在工作链路中的位置调整缓冲区大小,以应对紧前工序延误,公式如下[17]
qi=liLi(6)
式中,qi为工序i位置权数;li为工序i时间中点与项目开始时间的差值;Li为工序i所在链路的总时间长度。
1.2.3 风险偏好度γi
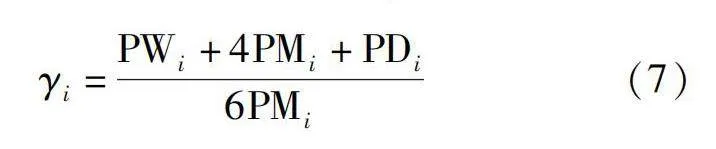
依据项目现场施工人员,项目现场经理和项目总监对工序i的风险态度,通过加权风险偏好度公式计算出工序i的风险偏好度γi,公式如下[17]
γi=PWi+4PMi+PDi6PMi(7)
式中,γi为风险偏好度;PWi为现场施工人员估计时间;PMi为项目现场经理估计时间;PDi为项目总监估计时间。
综上因素,工序i所在链路的缓冲区公式如下[17]
ΔB=di(1+qi)(1-γi)(8)
式中,ΔB为工序i所在链路的缓冲区;di为工序i安全时间;qi为工序i位置权数;γi为工序i风险偏好度。
项目现场经理可以基于式(8)计算换电站项目缓冲区大小,并依据此合理调整施工计划,优化项目管理。
1.3 缓冲区动态监控
Goldratt提出的缓冲区静态三分监控法简单易行,但没有考虑项目的实际完工进度与缓冲消耗之间的联系[18]。通过重构缓冲区的二维结构,调整三色区域的占比和采取资源使用措施,以确保项目进度按计划推进。
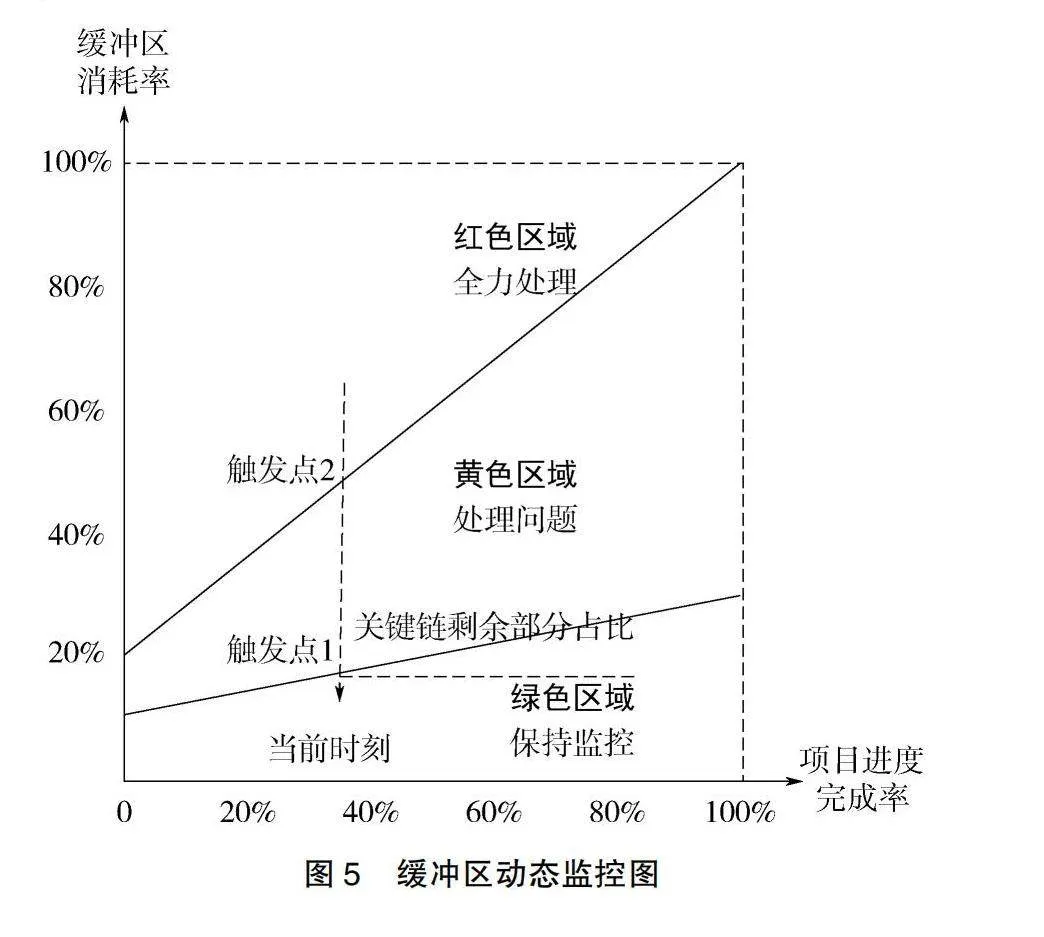
1.3.1 二维图表构建
以项目进度完成率为横轴,以缓冲区消耗率为纵轴,构建二维图表,动态展示项目进度状况。
1.3.2 三色区域划分模式调整
基于重卡换电站项目建设复杂性和Pert法对于完工概率的计算,本文对缓冲区消耗进行调整,绿色区域占20%,黄色区域占30%,红色区域占50%,同时制定了更为主动的缓冲区资源使用措施。
2 改进关键链法在X重卡换电站项目施工进度的模拟
2.1 工程背景及WBS工序拆解
以X重卡换电站EPC项目(以下简称“X项目”)为例,该项目位于X市,使用关键路径法作为项目的管理方法,总工期为82d,使用改进关键链法对X项目进行进度优化模拟。施工范围涵盖前期的地勘设计、中期的土建工程与换电系统安装调试和后期的整站验收全过程。施工内容包括但不限于如下几个方面:土建工程,涉及整个换电站的结构,包括电缆沟和变压器基础施工;设备安装与调试,包括桁架换电机器人、300kW电池架载机等关键设备的安装调试工作;系统集成,包括站控系统、外壳系统和供配电系统的安装调试,确保各系统协同工作;系统联调,包括整站系统联合调试,确保系统达到设计要求和运营标准。
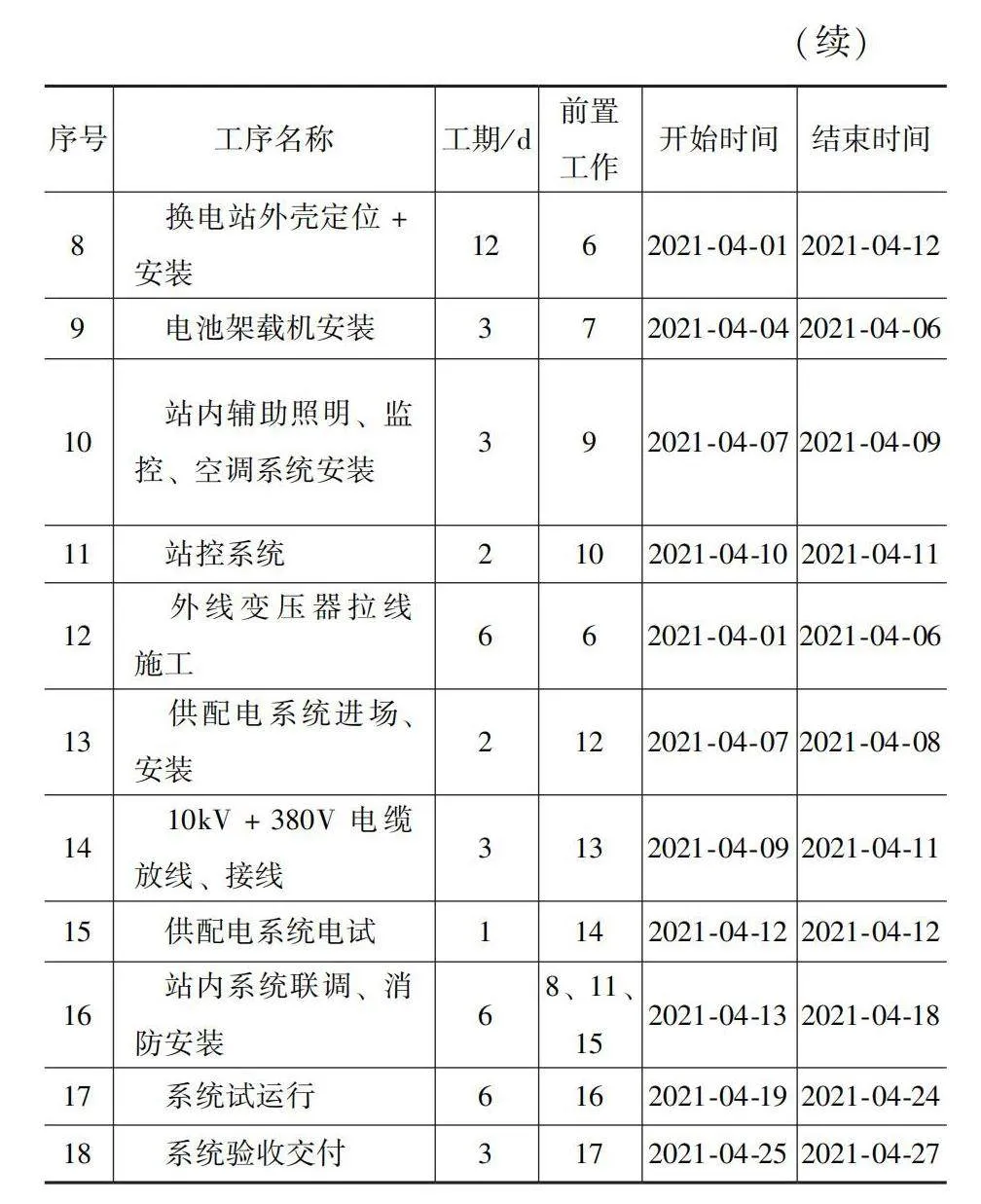
为有效管理这一复杂工程项目,本文基于工作分解结构(Work Breakdown Structure,WBS)对X换电站项目进行工序逻辑关系拆解(表1)。通过WBS拆解,项目团队能够清晰地识别每一项工序,理解各工序间的逻辑关系,并据此制订合理的施工计划。
2.2 X项目施工进度PERT法
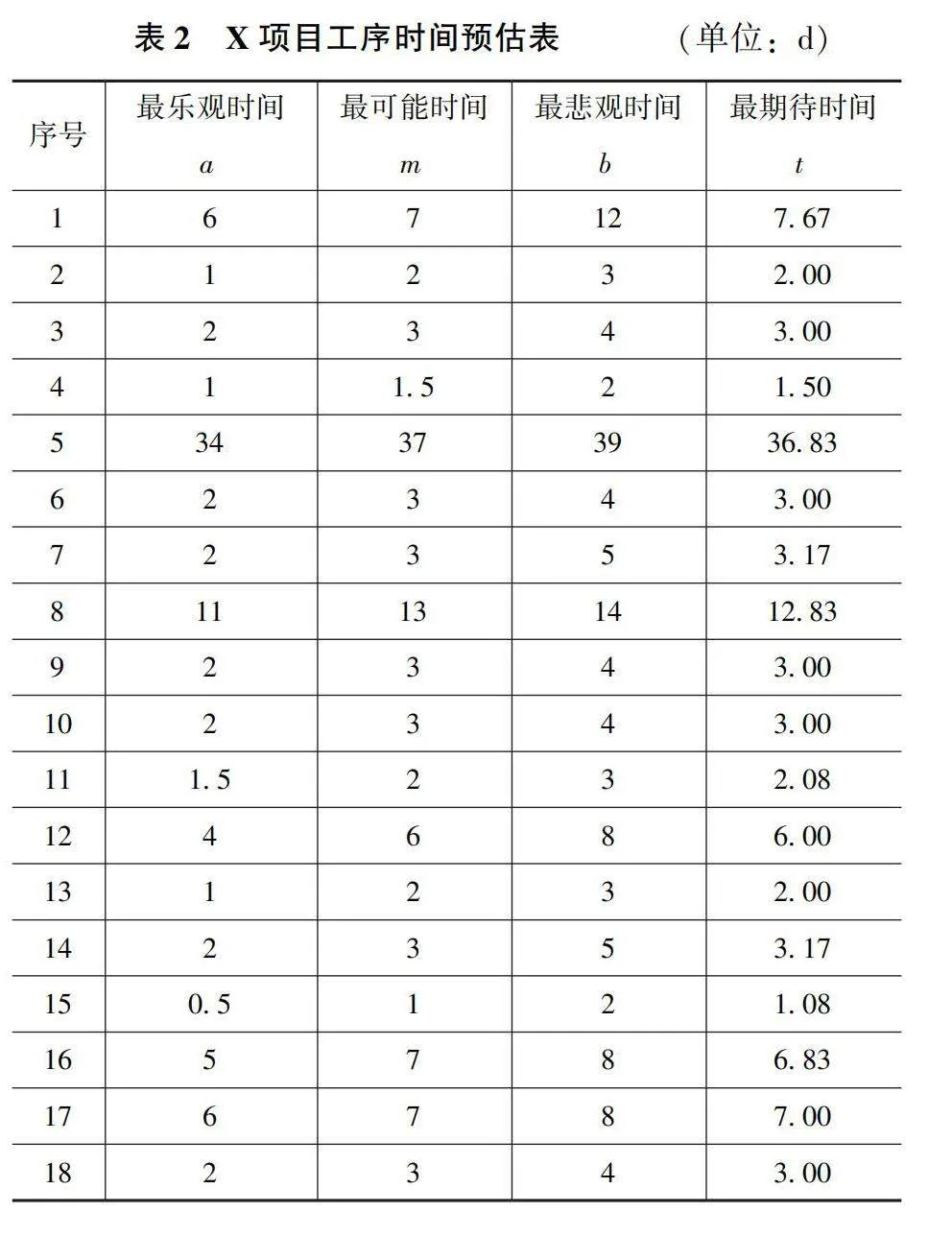
采用PERT法,综合现场施工人员、项目现场经理及项目总监的专业意见,对X项目的各个工序时间进行预估(表2),并通过PERT三时法[19],计算每个工序的最期待时间,公式如下
t=a+4m+b6(9)
式中,t为最期待时间;a为最乐观时间;m为最可能时间;b为最悲观时间。
PERT法基于概率分布估算项目的最期待时间,从而提高施工进度计划的精确度和可靠性。
2.3 X项目关键链识别
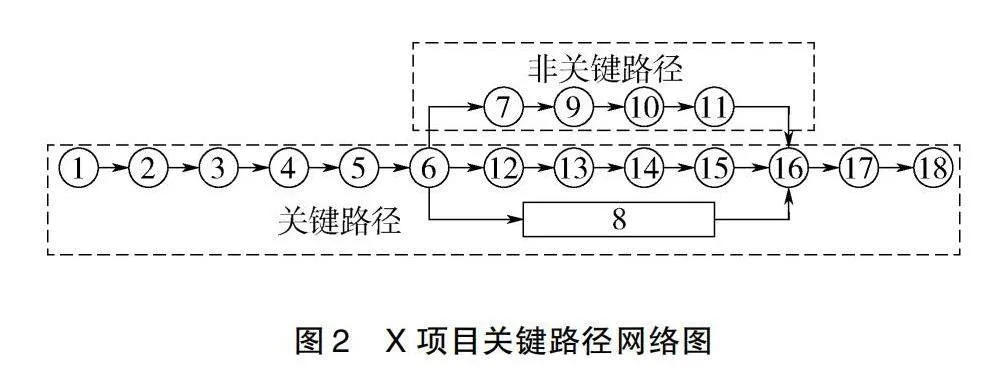
2.3.1 X项目关键路径确认
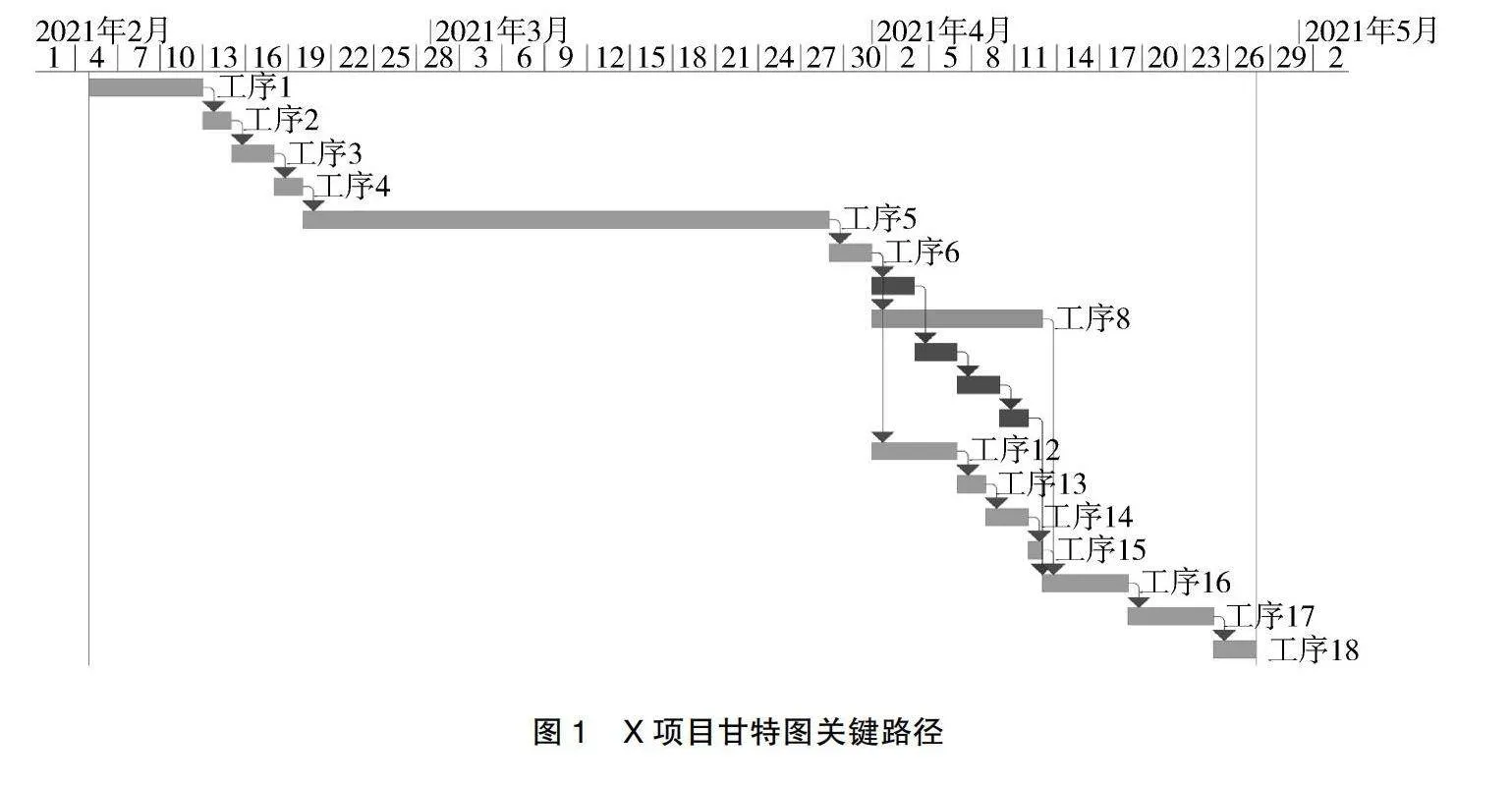
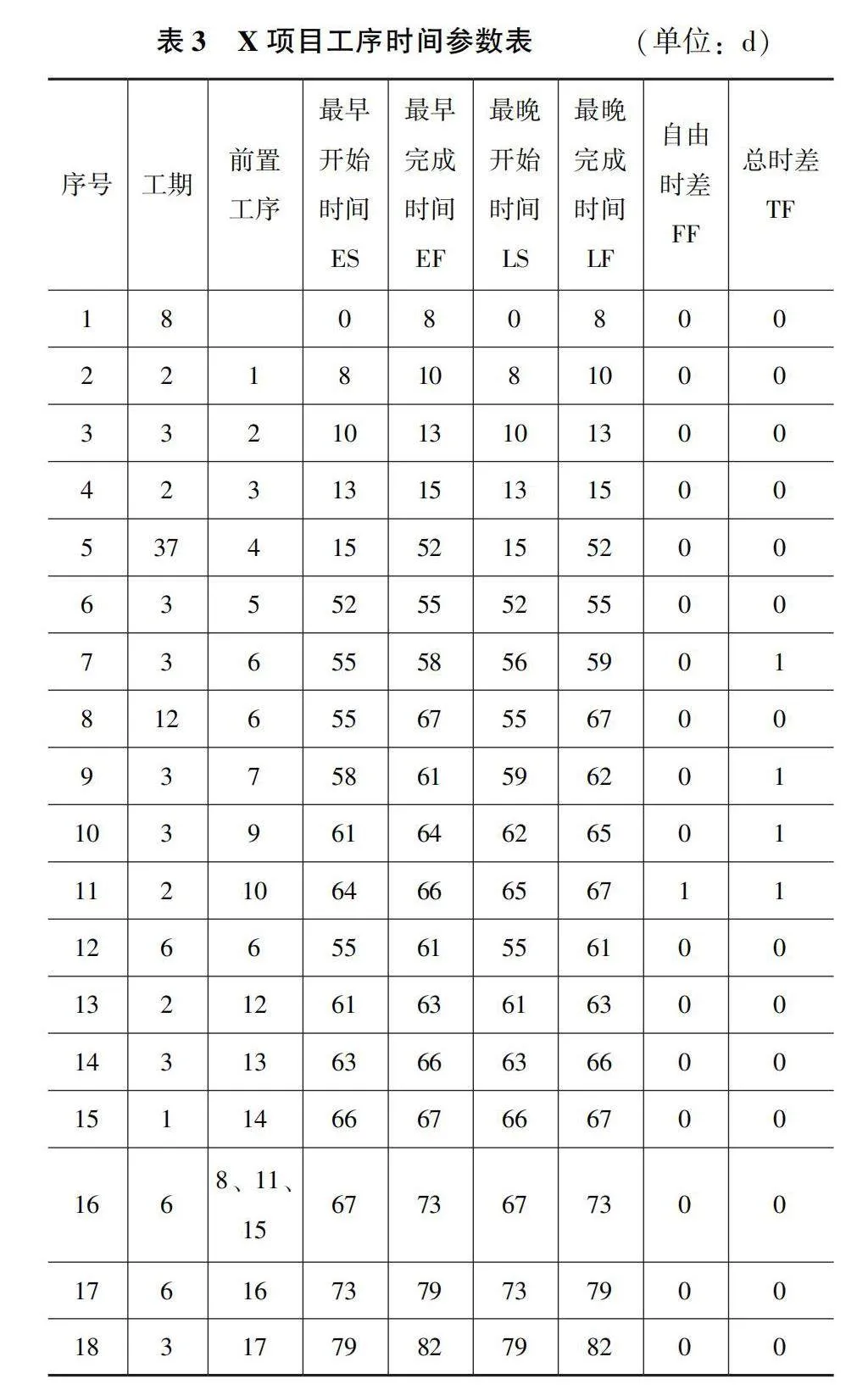
通过运用MS-Project软件的甘特图关键路径功能(图1),结合X项目工序时间参数表(表3),准确识别X项目关键路径网络图(图2),得出该项目的工期为82d。
2.3.2 X项目关键路径工序调整
通过表1,发现X项目中同一时间段内共有4组并行工序(见表4)。结合序偶亏值定理和重心定理,即式(1)~式(3),进行程序化排序分析,并在资源约束条件下进行顺序调整。以#1并行工序组为例,首先确定工序重心,其次根据序偶亏值定理和重心定理调整工序顺序,再次考虑资源约束视角,最后得到工序调整结果。
(1)确定工序重心。使用式(1)计算可得
G7=ES7+LF7=55d+59d=114d
G8=ES8+LF8=55d+67d=122d
G12=ES12+LF12=55d+61d=116d
(2)根据序偶亏值定理和重心定理调整工序顺序。对#1并行工序组中的工序7、工序12和工序8三个工序,使用式(2)和(3)计算可得
对于工序7和工序8
L7,8=max(0,EF7-LS8)
L7,8=max(0,58d-55d)
L7,8=3d
对于工序7和工序12
L7,12=max(0,EF7-LS12)
L7,12=max(0,58-55)
LAB7,12=3d
对于工序8和工序12
L8,12=max(0,EF8-LS12)
L8,12=max(0,67d-55d)
L8,12=12d
根据序偶亏值定理,工序7和工序8调整会延长工期3d;工序7和工序12调整会延长工期3d;工序8和工序12调整会延长工期12d。应该首先执行工序7。
(3)考虑资源约束视角。工序7的工期持续最短,完成后可以释放电工资源,有利于工序8和工序12对于电工的需求。
(4)工序调整结果。将工序7调入关键链,将工序8和工序12调出关键链。
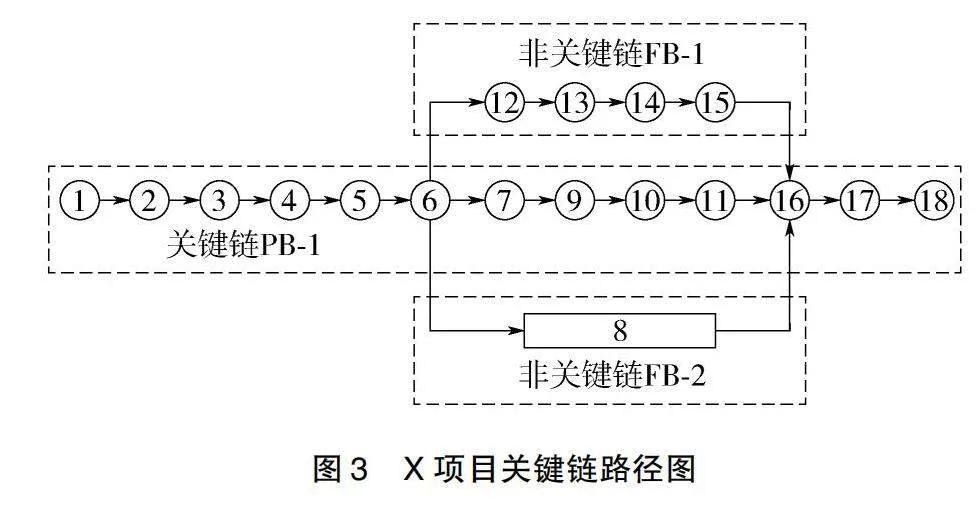
基于对#1并行工序组的分析,对其他三组并行工序组进行相同的系统化计算及分析。以上4组并行工序调整后的关键链PB-1顺序为:工序7→工序9→工序10→工序11;非关键链FB-1工序为:工序12→工序13→工序14→工序15;非关键FB-2为:工序8。
2.3.3 X项目关键链确认
通过计算和分析,确认X项目的关键链(图3)。根据关键链的开始和结束日期,X项目的关键链持续时长为81d。此外,两个非关键链FB-1和FB-2的工期同为12d。
2.4 X项目缓冲区优化计算
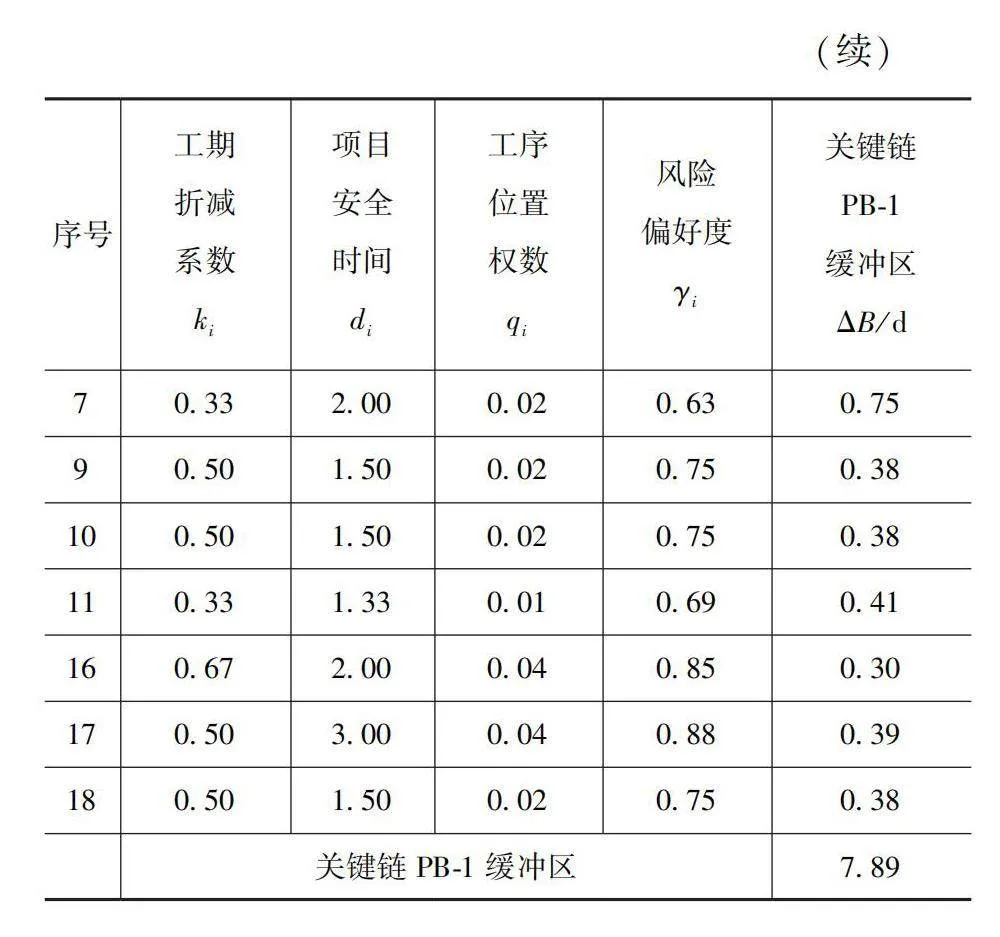
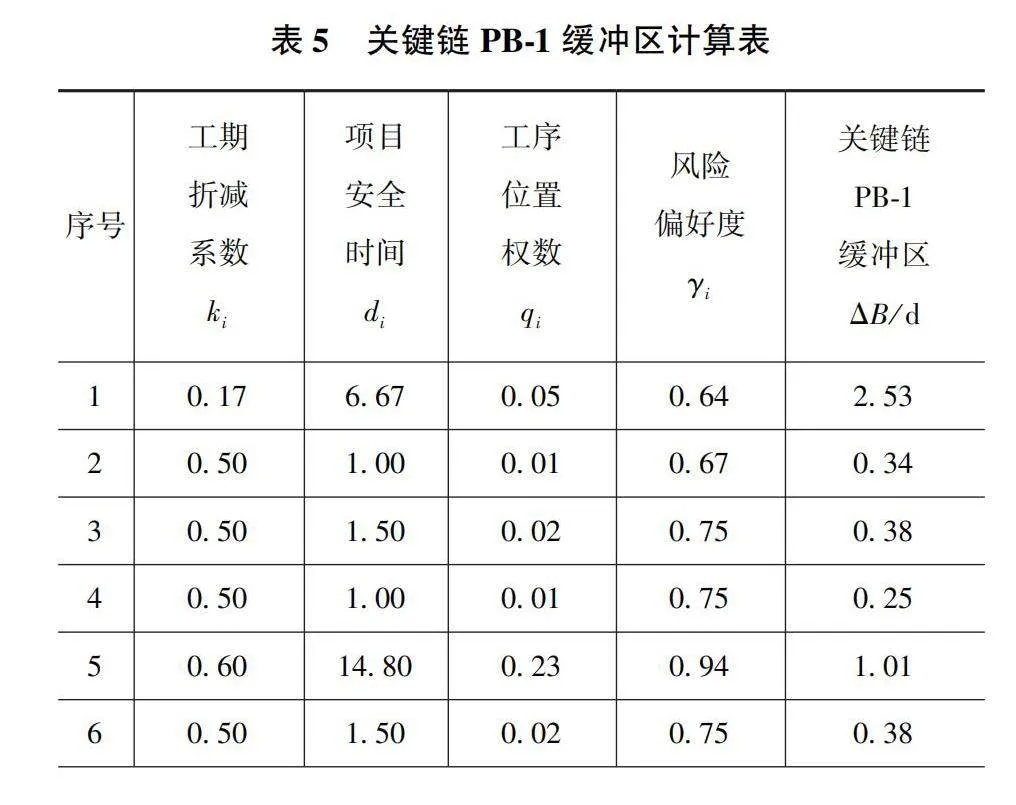
2.4.1 关键链PB-1缓冲区优化计算
通过式(4)~式(8),对关键链PB-1缓冲区时间进行计算,时间为7.89d(表5),约8d。
2.4.2 非关键链FB-1和FB-2缓冲区优化计算
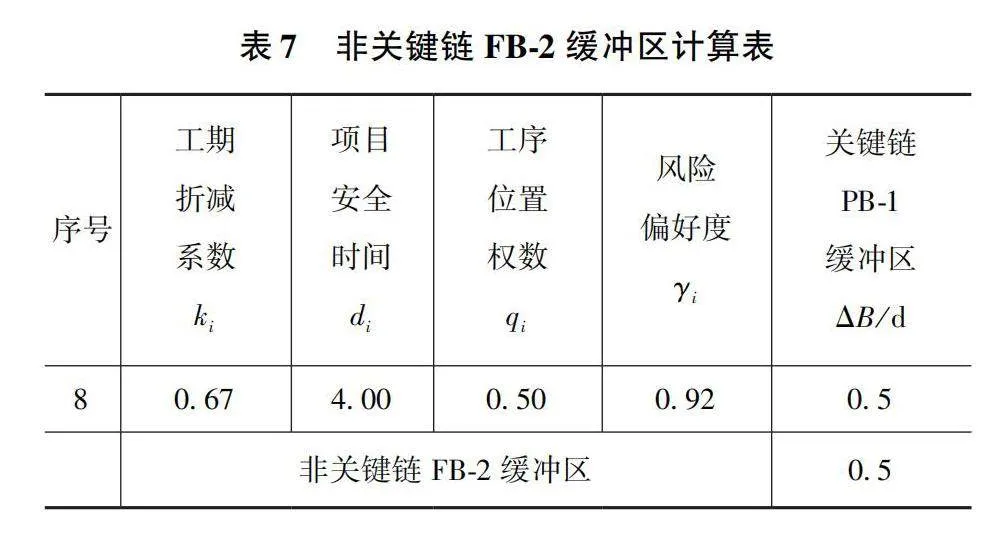
对非关键链FB-1和FB-2的缓冲区进行计算,FB-1的缓冲区时间为2.44d(表6),约3d;FB-2的缓冲区时间为0.5d(表7),约1 d。
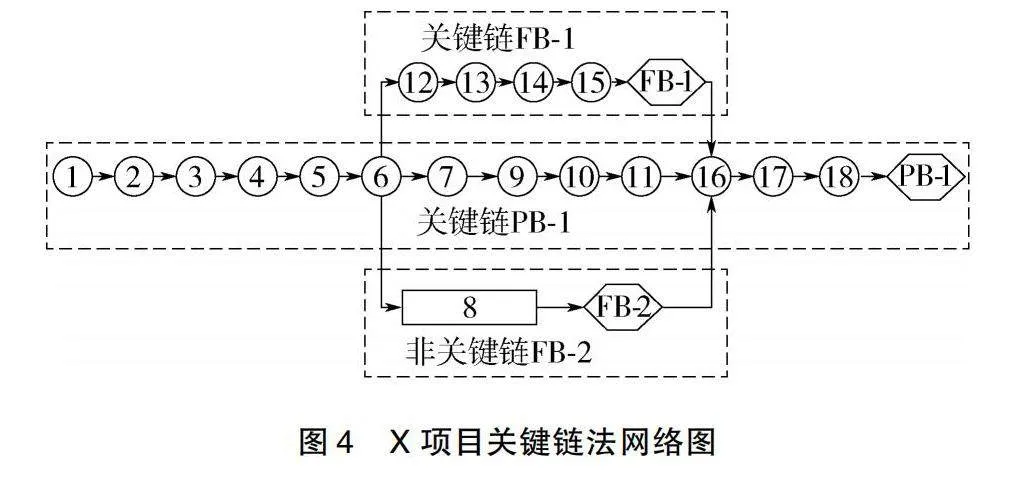
基于关键链法定义,在关键链结尾处设置缓冲区,以PB-1表示;在非关键链与关键链接驳处设置缓冲区,分别以FB-1和FB-2表示。X项目关键链法网络图如图4所示。
关键链PB-1缓冲区为8d,非关键链FB-1和FB-2缓冲区分别为3d和1d,非关键链缓冲区总共为4d。X项目缓冲区总时长为8d+4d=12d。
X项目关键链PB-1持续时长为81d,关键链PB-1缓冲区为8d。关键链为贯穿整个项目最长的链路,故X项目最短工期为81d-8d=73d。
2.5 X项目缓冲区动态监控
本文通过PERT法计算项目完工概率,以此设置缓冲区并制定应对措施,以确保方法的科学性和可行性。
利用式(10)[19],计算X项目关键链路径的标准差σ,公式如下
σ= b-a62=b-a6(10)
式中,σ为X项目关键链路径的标准差;b为关键链路径最悲观时间之和,为100d;a为关键链路径最乐观时间之和,为66.5d(见表8)。
利用式(11)[19]得出完工概率系数,公式如下
λ=Q-tσ(11)
式中,λ为完工率系数;Q为关键链路径最短工期,为73d;t为关键链路径最可能完工时间,为82.08d(见表8);σ为关键链路径的标准差,为5.583。计算得
λ=73-82.085.582≈-1.627
查标准正态分布表,当λ≈-1.627时,P(λ)≈0.0527。X项目在73d完工的概率为5.27%,延迟风险的概率为94.73%。
针对这一风险评估结果,本文采取主动的缓冲区监控和更积极的应对策略。绿黄红三色缓冲区按照2∶3∶5的比例划分,缓冲区动态监控图如图5所示,并在缓冲区消耗达到黄色区域时处理问题。这种策略不仅能提高监控的灵敏性,还能避免问题的扩大化,缓冲区动态监控的设置与动作见表9。
通过以上设定,在耗费0~20%缓冲区资源情况下,X重卡换电站项目的完成时间预计在73~75.4d,相比传统关键路径法预计的82d工期,可以提前6.6~9d完成,显著提高了项目效率。
3 模拟验证及量化分析
3.1 关键链及非关键链优化工期模拟验证
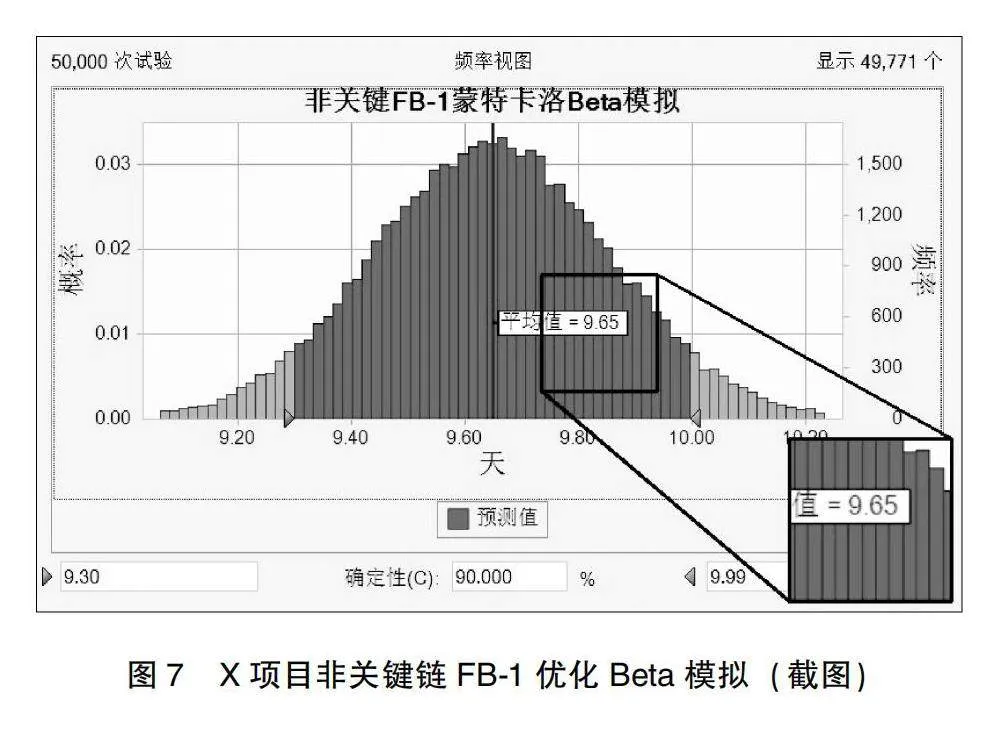
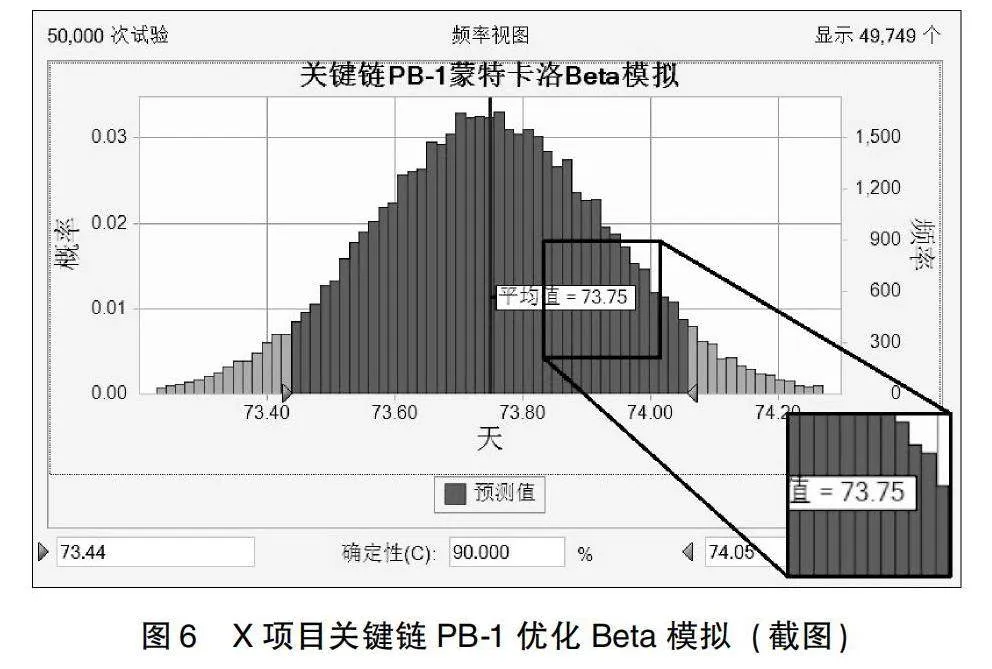
本文采用Crystal Ball软件中的蒙特卡洛Beta分布验证X项目进度优化方案的有效性。Beta分布的参数基于X项目工序时间预估表(表2)中的最乐观时间(a)、最可能时间(m)和最悲观时间(b)来确定。
通过设定95%置信水平和90%确定性,分别对关键链PB-1、非关键链FB-1和FB-2进行5万次模拟(图6、图7和图8),模拟结果分布显示了一个明确的集中趋势(表10),从而有力证明了改进关键链法的科学性。
3.2 关键链方差贡献图和等级相关图分析
利用Crystal Ball软件的敏感度分析工具,对关键链PB-1中各个工序的不确定性影响及相互关系进行量化分析,为项目管理和风险分析提供明确指导。
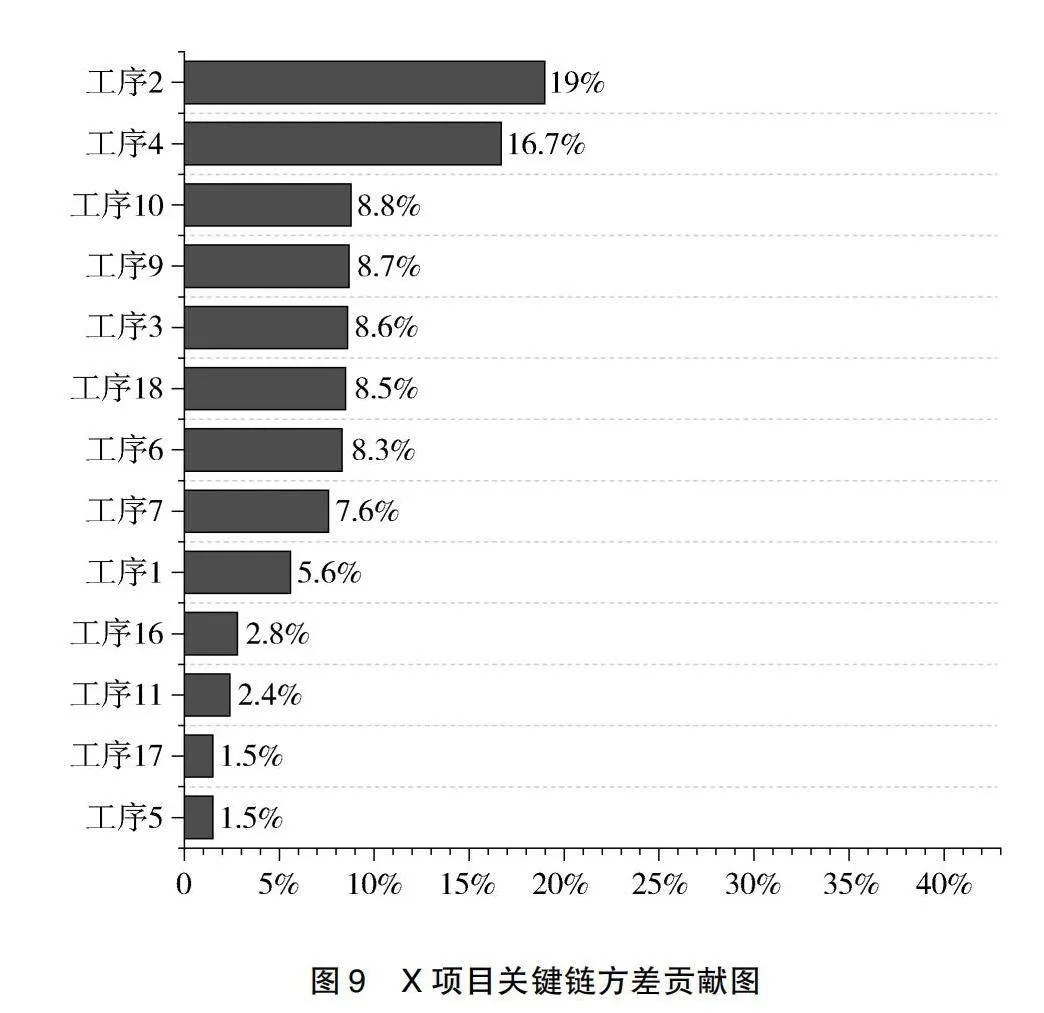
3.2.1 关键链方差贡献图
方差贡献图(图9)是一种可视化工具,通过分析各个工序的输出方差,帮助项目管理者识别出对项目不确定性贡献最大的工序。根据图9可知,工序2和工序4分别贡献了19%和16.7%的不确定性,表明针对以上两个工序的管理和优化可以显著降低关键链的风险。
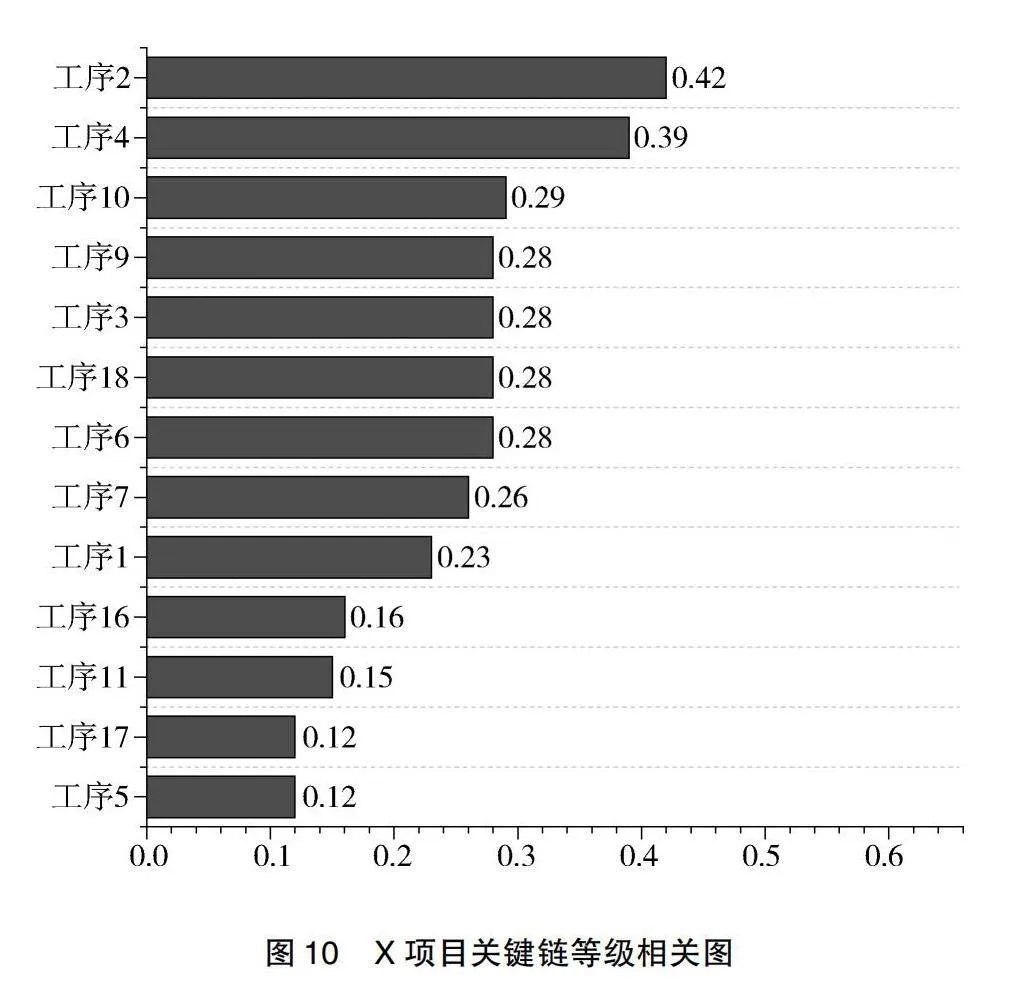
3.2.2 关键链等级相关图
等级相关图(图10)通过量化工序之间的相互影响,衡量它们的相关程度。根据图10可知,工序2和工序4的相互关系系数分别为0.42和0.39,表明它们在X项目进度中相互依赖。
3.2.3 应对策略
工序2和工序4均在关键链路前段,且对紧后工序影响较大,从工程角度对以上2个工序的方差贡献进行分析,具体原因及应对策略见表11。
除了实践以上应对策略,项目经理还可以通过缓冲区动态监控图积极调配缓冲区资源,以应对各类潜在风险。通过综合运用各类策略及组合,可有效降低项目推进过程中的风险,提升管理效率。
4 结语
本文将改进的关键链法应用于X重卡换电站项目施工进度模拟中,相较于传统的关键路径法,改进的关键链法将工期从原定的82d缩短至73~75.4d,显著提升了施工计划的精确性和项目进度管理。改进的关键链法采用序偶亏值定理和重心定理,结合资源约束,对关键链进行了精确识别。通过考虑工序安全时间、工序位置权数和风险偏好度,优化缓冲区设置,实施三色缓冲区监控及采用应对措施,进一步增强了项目进度的可控性和灵活性。此外,本文通过蒙特卡洛模拟和敏感度分析,不仅验证了优化方案的科学性和可行性,还提出了针对性管理策略,有效降低了项目推进过程中的风险,研究成果可为项目管理实践提供新视角。鉴于关键链法在本项目中展现的潜力,未来可以深入研究相似类型项目,以扩大关键链法的应用范围。
参考文献
[1]陶学宗,林泽宇,许登豪.集装箱港口集疏运重卡电动化的经济性分析[J].气候变化研究进展,2024,20(3):351-360.
[2]谭泽涛.基于关键路径法的项目进度管理研究[J].建筑经济,2019,40(9):67-71.
[3]张俊光,冉文娟,贾赛可,等.关键链项目缓冲设置研究述评与展望[J].管理评论,2017,29(12):195-203.
[4]郑岳,姚佼.基于关键链技术的房地产建筑项目进度管理优化研究[J].项目管理技术,2024,22(5):5-10.
[5]YADAV D K,KULKAMIi A,YAO H. A comparative study of managing a project using traditional management techniques and a critical chain project management methodology in aircraft maintenance field[J]. Journal of Transportation Technologies,2022,12(4):544-558.
[6]李锋.关键链技术在塑料管道产品开发进度管理的应用——以R公司塑料管道开发M项目为例[J].项目管理技术,2024,22(5):24-32.
[7]GOLDRATT E M.Critical chain [M].Great Barrington:the North River Press Publishing Corporation,1997.
[8]NEWBOLD R C.Project management in the fast lane-applying the theory of constraints [M]. Boca Raton:Lucie Press,1998.
[9]张俊光,刘念.基于工期-成本综合效用最大的关键链项目缓冲确定[J].运筹与管理,2021,30(10):87-94.
[10]李洪波,林俏,曹依武. 考虑技能因素的软件项目关键链缓冲区大小计算方法[J]. 工业工程与管理,2021,26(4):195-201.
[11]张向睿,董雄报,向华.基于Z-number模糊数的管理信息系统开发项目缓冲区研究[J]. 科技管理研究,2019,39(23):188-195.
[12]秦琴,梁承姬.自动化码头考虑缓冲区的设备协调调度优化[J].计算机工程与应用,2020,56(6):262-270.
[13]王利军,梁承东,李貌,等.电动重卡换电技术研究现状与发展[J].中国汽车,2024(4):8-12.
[14]程飞,郭春林,高泽阳,等.参与电网削峰调节的电动重卡换电站调度策略[J].电力系统自动化,2024,48(9):120-128.
[15]乞建勋,李星梅,苏志雄.基于标准规范法的四元行偶优化决策问题探究[J].数学的实践与认识,2009,39(23):18-26.
[16]褚春超.缓冲估计与关键链项目管理[J].计算机集成制造系统,2008,14(5):1029-1035.
[17]宋久乐. 基于关键链技术的轨道交通建设项目进度管理研究[D].郑州:河南工业大学,2014.
[18]张俊光,万丹.基于缓冲账户差异配置的关键链项目动态集成监控[J].管理评论,2023,35(1):233-242.
[19]续晓春.PERT 网络在工程风险估计中的应用初探[J].太原理工大学学报,2000,31(1):87-88.
收稿日期:2024-06-11
作者简介:
刘威(1982—),男,研究方向:新能源项目进度管理。
朱雨佳(1998—),女,研究方向:智能建造。
周颖(1999—),女,研究方向:城乡建设。
赵林姣(2002—),女,研究方向:工程管理。
韩利红(通信作者)(1969—),女,副教授,硕士研究生导师,研究方向:工程管理。