水域卫士
2024-12-31 00:00:00魏子奥赵富琦吴浩东余倩如余妍妍
电脑知识与技术 2024年33期

关键词:水面机器人;水域垃圾清理;物联网
0 引言
传统的水面垃圾清理方法,如人工打捞和机械打捞,存在劳动强度大、工作环境恶劣、清理效率低下等问题。目前,国内外对于水面垃圾清理机器人的研究主要集中在自动清理无人船(清洁机器人)的开发上。现有的水面垃圾清理机器人仍存在一些问题,例如续航能力不够、船体太小、收集的垃圾量太少等。本设计旨在设计出一种节能环保、工作效率高的水面垃圾清理机器人,以达到高效清理水面垃圾的目的。
1 水面机器人总体方案设计
本方案设计采用了独特的结构设计,仿照小型水生昆虫水黾在水面上漂浮和滑行的特性来构建机器人整体框架,利用“生物与仿生”中的相关知识,以达到提高工作效率、减小风力阻碍的效果。利用太阳能电池功能达到可持续绿色循环的效果。还可以通过计算机在云平台上直观地统计出每片水域的水质信息,采集这些数据进行处理,从中分析和挖掘出有价值的信息,加快水质监测分析,实现水质监测信息的办公自动化分析模式[1]。
2 机器的推进结构
机器人推进结构的选择对其性能的影响至关重要,主要包括导管螺旋桨推进器和电机推动器。传统的电机推动器采用恒电压驱动方式,可能导致电机运转速度较低、震动较大,并产生噪声。这种噪声不仅影响使用体验,还可能对机器人的其他部件造成损害。由于液体流动的阻力损失和泄漏均较大,液压传动的效率较低。这可能导致电机需要消耗更多的能源以驱动机器人进行工作。无论GszEwY+IHv8sIQvUIjPnlw==是恒电压驱动还是高低压驱动,电机在长时间工作下都可能产生大量的热量。这不仅会影响电机的性能,还可能缩短电机的使用寿命[2]。
导管螺旋桨推进器通过导管与螺旋桨的精密结合,显著提高了水流的速度和压强,从而大幅提升了推进效率。这种设计使得水流在导管内得以有效引导,减少了水流冲击,可以使螺旋桨在旋转时更加高效地将水能转化为推进力。导管的外形设计可以减少螺旋桨产生的水流噪声,降低机器人的噪声污染。导管螺旋桨在一定程度上可以保护螺旋桨免受外界物体的碰撞和损坏,抵御外界物体的碰撞。这种设计不仅提升了机器人的耐用性,还增强了其在水域环境中的稳定性和安全性。故选择导管螺旋桨推进器作为机器的推进结构。
3 垃圾收集装置设计
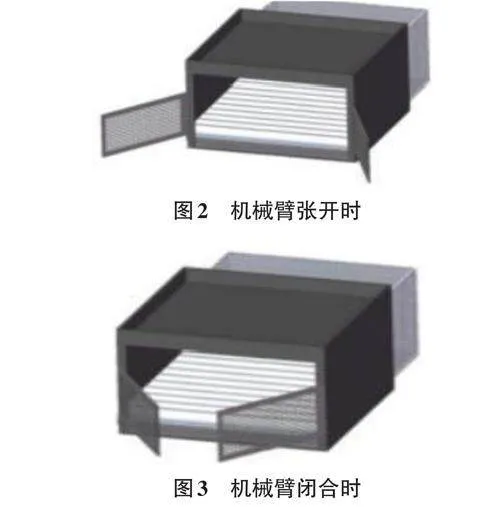
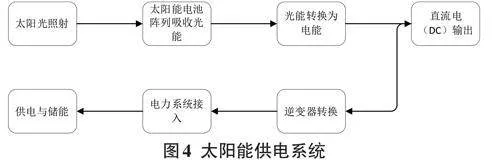
在水面垃圾清理中,传统的铲斗式垃圾收集装置由于水流和风向的影响,垃圾可能会漂移,导致铲斗需要不断调整位置,进一步降低了收集效率。铲斗式垃圾收集装置对于某些特定类型的垃圾(如液体垃圾、黏性垃圾等)可能无法有效收集,这限制了其应用范围。虽然铲斗式垃圾收集装置在水面垃圾清理中有其应用,但也存在着操作难度大、效率低下、对垃圾类型和环境适应性有限、维护成本高、能耗大以及对操作人员依赖性强等缺点。随着技术的发展,亟须探索更高效、环保且自动化的水面垃圾清理方法。
本设计使用耐腐蚀、耐磨损的材料制成,可以应对各种复杂的水面环境。整体设计呈长方体状,内部设有渐变螺纹,通过水流旋转和抽水泵形成的液面差,可使垃圾顺着螺纹向下到达收集装置底部。将抽水泵安装在收集装置内部或附近,用于抽出桶内液体,形成液面差,从而带动水流和垃圾旋转进入收集装置[3]。收集装置底部安装有一层网,防止垃圾进入吸水管阻塞水泵,同时确保垃圾被有效收集在装置内。通过调整机械结构的传动系统,能够有效控制浮箱的高度状态,进而实现对整个装置上下运动的精准管理,防止垃圾外泄。这种新型垃圾收集装置的设计,有望显著提高水面垃圾清理的效率和质量。
4 太阳能供电系统
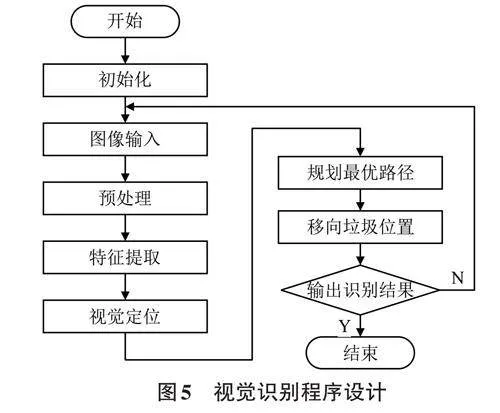
为解决水面垃圾清理机器人的连续用电问题,一个能够维持整个系统连续稳定运行的供电系统至关重要。太阳能是一种取之不尽、用之不竭的可再生能源。因此,利用太阳能供电可以确保水面机器人拥有持久的能源供应,无须频繁更换电池或燃料,降低了维护成本和运行成本。太阳能无处不在,具备就地供电的便利性,无须依赖长距离输送,从而有效避免了因长距离输电线路而产生的能源损失。对于水面机器人来说,太阳能供电系统可以在任何有阳光的地方使用,不受地域限制,具有较强的适应性。在水面环境下,太阳能供电系统可以减少因机械故障导致的停机时间,提高水面机器人的工作效率和可靠性。如若采用蓄电池,则需要频繁充电,无法保证机器人持久稳定地正常运行,此外使用存储量过大的蓄电池会额外增加机器人的负重,所以采取太阳能供电系统作为机器人能源自补充方式[4]。
太阳能电池阵列由多个太阳能电池板组成,每个太阳能电池板包含多个太阳能电池单体。这些电池单体通过串联和并联的方式组合成电池板,进而构成太阳能电池阵列。太阳能电池是利用光功率效应将太阳能转化为电能的一种器件,它的基本结构由P型半导体和N型半导体交界而成。当光线照射在这个结构上时,能量将被吸收,电子被激活,电子从P型半导体向N型半导体流动,形成一个电势差,这个电势差可以将电子流动变成电流,从而产生太阳能电能。安装太阳能电池阵列时,须挑选阳光充足的位置,调整角度与方向以获得最佳发电效果。安装完成后,需要通过调试与测试,确保电池板连接无误、电路畅通、逆变器运行正常,从而保障阵列的稳定运行和高效发电。
5 视觉识别程序设计
图像预处理算法采用二值化算法,二值化指的是将原图通过阈值把像素值都置为0或255,最终得到一张像素值都为0或255的一维图像。这一过程可以将图像简化为黑白两种颜色,便于后续的处理和分析。在OpenCV库中,可以通过cv2.threshold()函数实现二值化。这个函数接受源图像、阈值、最大值和类型作为参数,并返回阈值和阈值处理后的图像。此外,还可以使用自适应阈值方法(如cv2.adaptive⁃Threshold()) ,该方法会为图像的每个区域计算阈值。全局阈值二值化的公式可以表示为:P(x,y) = { 255, ifP(x,y) > T0,otherwise }。其中,P(x,y)表示图像中位于(x,y)处像素的灰度值,T是全局阈值。
使用视觉引导和定位,增强图像技术。为了确保自主巡航机器沿指定路径行驶,须在视觉导航过程中实时获取导航的方向信息[5]。在导航过程中,自主巡航机器通过实时获取自身位置信息,从而规划出下一时刻行驶的路径。针对以上的行驶原理,可采用二维码导航的方式进行自主巡航导航[6]。在导航过程中,机器通过扫描识别二维码,并依据其与自主巡航机器之间的相对角度来确定接下来的行进方向。每个二维码都有其独特的标识,对应着不同的空间坐标点。利用这些二维码所携带的信息,巡航机器可以轻松地确定自身当前位置,并获取下一步的行进指引,使得整个巡航过程更加高效和准确。
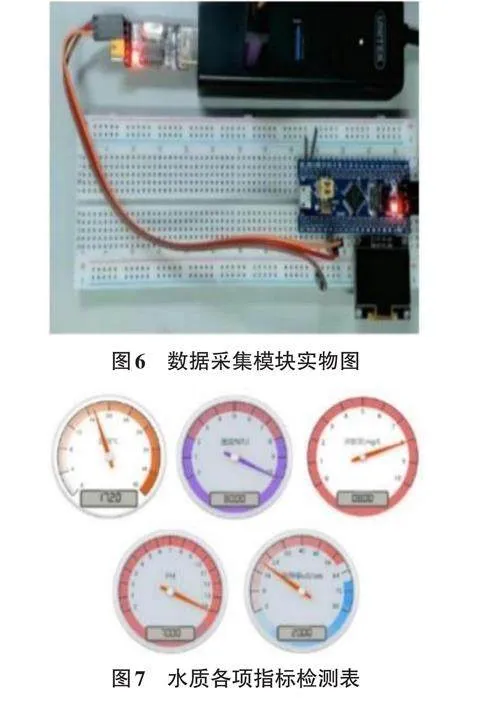
6 水质监测和水样采集
对水质传感器、采样水泵及相关零部件进行选型分析,实现水质传感器采集水质参数和定点水样采集。从水样采集数据上传与传输的角度来看,在利用STM32嵌入式技术时,如果通信距离超过5米,则不建议使用串口,因为误码率会显著增高。而对于数据的格式而言,量数据的分包方式,对于通信包字节数较大且包个数较少的情况,建议使用TCP协议;而对于包字节数较少但包数量特别多的情况,则建议使用串口通信。因此,提出了先将数据远程传输至平台,再从平台获取数据并利用数据可视化软件工具制作可视化大屏的解决方案[7]。
7 总结
此次设计的水面机器人借鉴了小型水生昆虫水黾在水面上漂浮和滑行的特性,据此构建了机器人的整体框架,使风波阻力减小,更加稳定,更加轻便,能够保证机器人在水面上平稳地行驶工作。利用视觉引导和定位,增强图像等方式进行分区域导航,GPS 定位机器人的位置。
采用独特的垃圾清理装置,通过将抽水泵安装在收集装置内部或附近,抽出桶内液体形成液面差,从而带动水流和垃圾旋转进入收集装置。为了实现机器人能源的持续供应,应充分利用可再生能源——太阳能。将其作为机器人的主要能源来源,并深入研究和优化了供电系统,确保其在各种条件下都能稳定、高效地运行。实现绿色生态环保,增加机器人的续航能力。太阳能系统供电不需要依靠外部电源,更加灵活方便。
通过实施综合性的监测和分析机制,实现了水质监测数据向网络数据处理中心的实时同步。这一做法显著提高了水质监测分析的效率,同时也推动了水质监测信息处理向自动化、智能化办公模式的转变。利用预先设定的分析算法和模型,网络数据处理中心能够自动地对实时上传的数据进行初步评估和分析,并快速生成详尽的报告和实用建议。针对不同地区水域的不同情况,对水质传感器、采样水泵及相关零部件选型,实现水质传感器采集水质参数的采集传输和定点水样采集。采集这些数据进行处理,从中分析和挖掘出有价值的信息。基于物联网云平台搭建水质参数实时监测平台,建立水质数据的物模型,采集水样在水质分析仪中具体检测水体的物理、化学和生物数据,从而根据所检测出的数据对水质情况进行客观评价。本论文的研究成果不仅为小型水域垃圾清理装置提供了切实可行的解决方案,而且为其提供了重要的理论支撑。此外,该机器人的成功研制,为清理小型水域漂浮垃圾带来了极大便利,显示出显著的使用意义及广阔的推广前景。