基于无人机机载AI模块的架空输电线路巡检技术
2024-12-21 00:00:00陈琨
中国新技术新产品 2024年16期

摘 要:在架空输电线路的巡检工作中,由于人工巡检方式效率较低,难以满足现代电网需求,因此本文基于无人机机载AI模块对架空输电线路巡检技术进行研究。首先,采用YOLOv3算法构建AI模块算法,对输电线路图像进行精确识别。其次,对损失函数进行优化,提高模型的预测准确性。最后,基于上述方法对架空输电线路巡检过程进行规划。测试结果表明,本文所研究的AI模块在输电线路巡检过程中能够检测架空输电线路中存在的缺陷,应用效果较好,能够达到最初设计目标,说明本研究为架空输电线路的巡检提供了一种高效的解决方案。
关键词:无人机;机载AI模块;架空输电线路;巡检
中图分类号:TM 74" " " " " " 文献标志码:A
随着电力网络持续扩大,架空输电线路的巡检工作越来越重要。常规的人工巡检方法存在效率低、人力成本高以及难以覆盖复杂地形等问题[1]。因此,开发一种高效、智能且安全的巡检技术已成为电力行业的迫切需求。
随着无人机技术的发展,引入机载AI模块进一步提升了无人机巡检的智能化水平[2]。采用先进的图像识别和算法技术,机载AI模块能够对输电线路进行自动识别、定位和缺陷检测,提高了巡检的准确性和效率。
本文研究基于无人机机载AI模块的架空输电线路巡检技术,详细介绍了基于YOLOv3算法的AI模块算法,分析其在图像识别中的应用。分析损失函数预测误差以及模型优化方法,提高AI模块的识别准确率。利用技术应用测试验证该技术在输电线路巡检中的实际应用效果。本研究为电力行业提供一种高效、智能和安全的巡检方案,保障电力网络安全运行。
1 基于YOLOv3算法的AI模块算法
为了对输电线路进行精确识别与检测,本文引入YOLOv3算法中的图像识别网络模型,将其应用于AI模块中,以提升图像处理速度,实时回传检测结果,自动生成检测报告[3]。
1.1 基于YOLOv3算法对机载AI模块进行图像识别
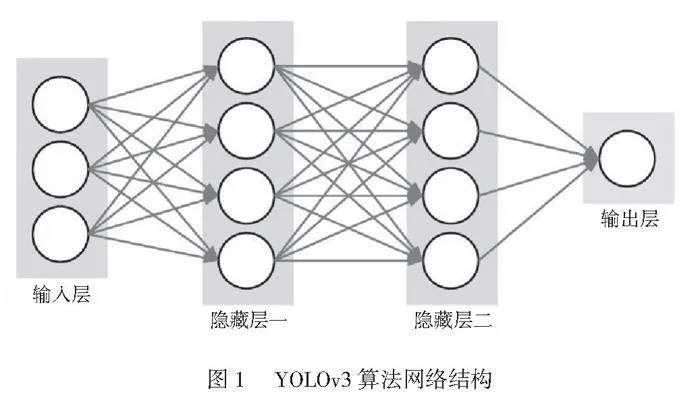
无人机巡检的核心技术是图像处理与目标检测,YOLOv3算法具有实时性和鲁棒性,其准确性高,因此备受重视。为精准定位巡检目标并快速识别缺陷,采用YOLOv3算法构建机载AI模块,将目标检测转化为单次前向传播回归问题,显著提升识别效率。YOLOv3算法网络结构如图1所示。
采用图1中的YOLOv3模型结构,将输入图像划分为网格。在每个网格范围内预测固定数量的边界框,为每个边界框匹配1个置信度得分,汇总网格中各个边界的置信度得分。
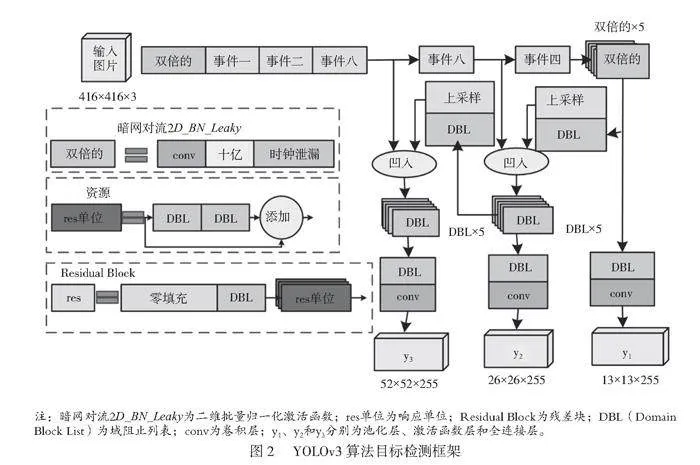
在YOLOv3的目标检测算法中,每个网格单元i都需要预测一系列边界框。根据中心坐标预测值来确定txi和tyi这些边界框的位置和尺寸。宽度和高度预测值twi和thi反映了边界框的宽度和高度相对于整个图像的缩放因子[4]。YOLOv3算法的目标检测框架如图2所示。
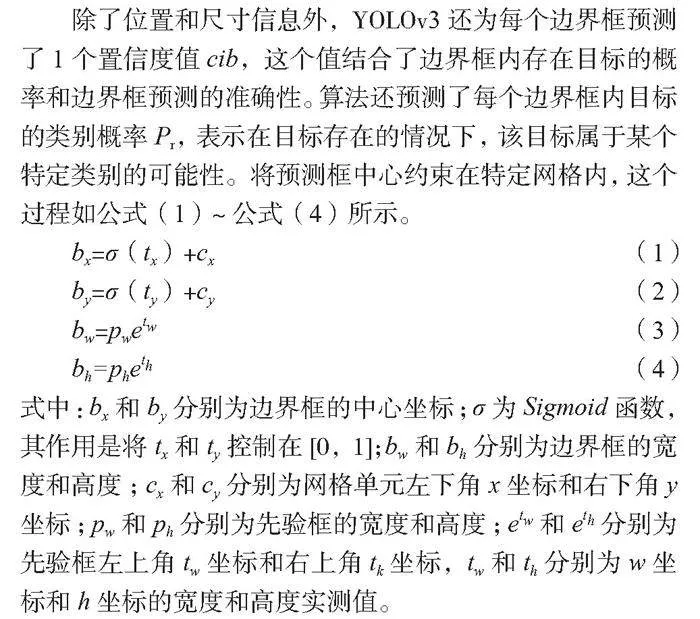
除了位置和尺寸信息外,YOLOv3还为每个边界框预测了1个置信度值cib,这个值结合了边界框内存在目标的概率和边界框预测的准确性。算法还预测了每个边界框内目标的类别概率Pr,表示在目标存在的情况下,该目标属于某个特定类别的可能性。将预测框中心约束在特定网格内,这个过程如公式(1)~公式(4)所示。
bx=σ(tx)+cx (1)
by=σ(ty)+cy " (2)
bw=pwetwnbsp; " " (3)
bh=pheth " " " "(4)
式中:bx和by分别为边界框的中心坐标;σ为Sigmoid函数,其作用是将tx和ty控制在[0,1];bw和bh分别为边界框的宽度和高度;cx和cy分别为网格单元左下角x坐标和右下角y坐标;pw和ph分别为先验框的宽度和高度;etw和eth分别为先验框左上角tw坐标和右上角tk坐标,tw和th分别为w坐标和h坐标的宽度和高度实测值。
结合置信度值和类别概率值,可以计算每个边界框内目标的最终得分,确定包括目的的边界框,对图像中的目标进行精确检测。
1.2 损失函数预测误差
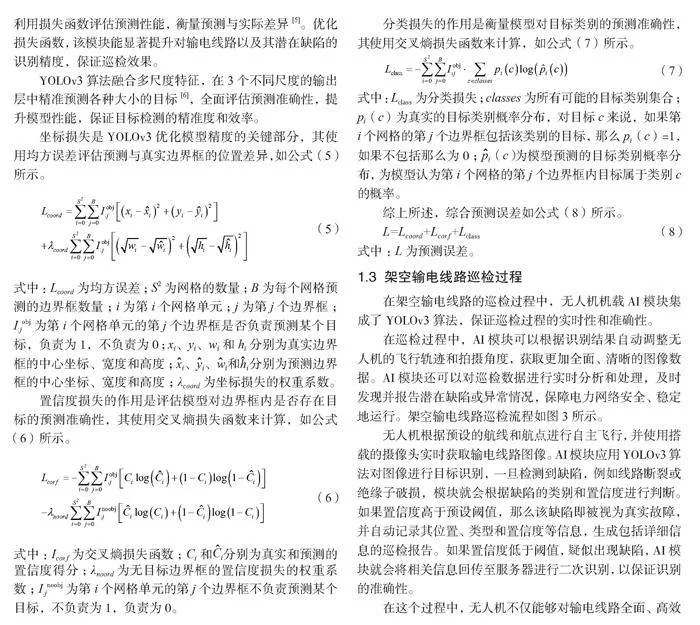
在架空输电线路巡检中,基于YOLOv3的机载AI模块利用损失函数评估预测性能,衡量预测与实际差异[5]。优化损失函数,该模块能显著提升对输电线路以及其潜在缺陷的识别精度,保证巡检效果。
YOLOv3算法融合多尺度特征,在3个不同尺度的输出层中精准预测各种大小的目标[6],全面评估预测准确性,提升模型性能,保证目标检测的精准度和效率。
坐标损失是YOLOv3优化模型精度的关键部分,其使用均方误差评估预测与真实边界框的位置差异,如公式(5)所示。
(5)
式中:Lcoord为均方误差;S2为网格的数量;B为每个网格预测的边界框数量;i为第i个网格单元;j为第j个边界框;Iijobj为第i个网格单元的第j个边界框是否负责预测某个目标,负责为1,不负责为0;xi、yi、wi和hi分别为真实边界框的中心坐标、宽度和高度;、、和分别为预测边界框的中心坐标、宽度和高度;λcoord为坐标损失的权重系数。
置信度损失的作用是评估模型对边界框内是否存在目标的预测准确性,其使用交叉熵损失函数来计算,如公式(6)所示。
(6)
式中:Iconf为交叉熵损失函数;Ci和分别为真实和预测的置信度得分;λnoord为无目标边界框的置信度损失的权重系数;Iijnoobj为第i个网格单元的第j个边界框不负责预测某个目标,不负责为1,负责为0。
分类损失的作用是衡量模型对目标类别的预测准确性,其使用交叉熵损失函数来计算,如公式(7)所示。
(7)
式中:Lclass为分类损失;classes为所有可能的目标类别集合;pi(c)为真实的目标类别概率分布,对目标c来说,如果第i个网格的第j个边界框包括该类别的目标,那么pi(c)=1,如果不包括那么为0;为模型预测的目标类别概率分布,为模型认为第i个网格的第j个边界框内目标属于类别c的概率。
综上所述,综合预测误差如公式(8)所示。
L=Lcoord+Lconf+Lclass " " " " (8)
式中:L为预测误差。
1.3 架空输电线路巡检过程
在架空输电线路的巡检过程中,无人机机载AI模块集成了YOLOv3算法,保证巡检过程的实时性和准确性。
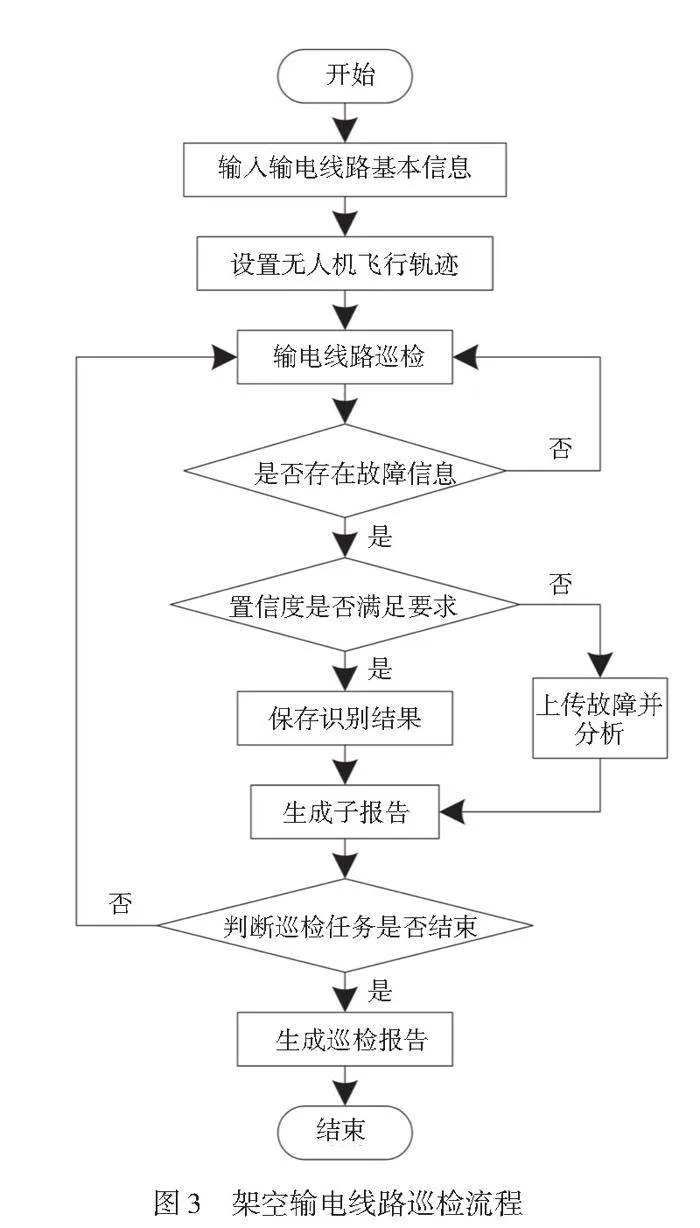
在巡检过程中,AI模块可以根据识别结果自动调整无人机的飞行轨迹和拍摄角度,获取更加全面、清晰的图像数据。AI模块还可以对巡检数据进行实时分析和处理,及时发现并报告潜在缺陷或异常情况,保障电力网络安全、稳定地运行。架空输电线路巡检流程如图3所示。
无人机根据预设的航线和航点进行自主飞行,并使用搭载的摄像头实时获取输电线路图像。AI模块应用YOLOv3算法对图像进行目标识别,一旦检测到缺陷,例如线路断裂或绝缘子破损,模块就会根据缺陷的类别和置信度进行判断。如果置信度高于预设阈值,那么该缺陷即被视为真实故障,并自动记录其位置、类型和置信度等信息,生成包括详细信息的巡检报告。如果置信度低于阈值,疑似出现缺陷,AI模块就会将相关信息回传至服务器进行二次识别,以保证识别的准确性。
在这个过程中,无人机不仅能够对输电线路全面、高效地进行巡检,还能够自动生成详细的巡检报告,为后续故障处理和维护工作提供支持。
2 技术应用测试
为了验证本文所提的基于无人机机载AI模块的架空输电线路巡检技术的实际应用效果,对集成了YOLOv3算法的AI模块进行测试,评估本文技术的应用性能,测试巡检过程中的缺陷检测精度。本次应用测试所使用的测试数据集包括有缺陷和无缺陷的绝缘子图像各300张。以文献[1]中的基于无人机低空摄影技术的架空输电线路智能巡检技术以及文献[2]中的基于人工智能的输电线路无人机巡检技术为对比技术,进行测试。
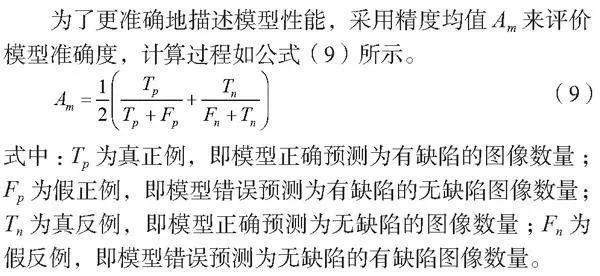
为了更准确地描述模型性能,采用精度均值Am来评价模型准确度,计算过程如公式(9)所示。
(9)
式中:Tp为真正例,即模型正确预测为有缺陷的图像数量;Fp为假正例,即模型错误预测为有缺陷的无缺陷图像数量;Tn为真反例,即模型正确预测为无缺陷的图像数量;Fn为假反例,即模型错误预测为无缺陷的有缺陷图像数量。
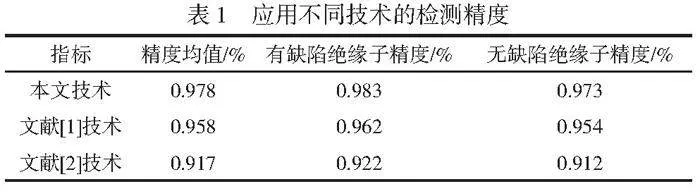
基于上述准备进行应用测试,得到应用不同技术的检测精度(见表1)。
根据表1中的结果进行分析,将本文技术与文献[1]技术和文献[2]技术进行对比可知,本文技术在架空输电线路巡检中的性能表现优异。在表1中,本文技术的精度均值达到0.978,远高于文献[2]技术的0.917,略高于文献[1]技术的0.958。在有缺陷绝缘子的识别方面,本文技术的精度为0.983,说明模型在识别关键缺陷方面能力出色。无缺陷绝缘子的识别精度也达到0.973,说明模型在区分正常与异常状态方面的准确性。
为了进一步验证本文技术的应用效率,对应用不同技术的图像处理时间进行统计,以单张图像处理均时以及平均处理速度为指标,得到应用不同技术的检测效率(见表2)。
由表2可知,不同技术在图像处理效率和速度方面的差异。其中,本文技术的单张图像处理均时仅为8.7 ms,与文献[1]技术的9.6 ms和文献[2]技术的11.3 ms相比,本文技术在处理速度方面表现出色。在平均处理速度方面,本文技术达到了每秒27.5 帧/s,虽然略低于文献[1]技术的29 帧/s,但是明显高于文献[2]技术的33.5 帧/s。虽然文献[2]技术的平均处理速度较高,但是其单张图像处理时间较长,可能影响实际应用的连续性和流畅性。综上所述,本文技术在保持较高处理速度的同时,显著缩短了单张图像的处理时间,有效提升了巡检系统的整体效率。
测试结果充分验证了本文技术在输电线路巡检中的准确性、高效性以及可靠性,为未来架空输电线路智能巡检提供了有力的技术支持。
3 结论
本文研究结合无人机与基于YOLOv3算法的AI模块完成架空输电线路的智能化巡检。在图像识别方面,AI模块能够准确识别输电线路图像,并优化损失函数来显著降低预测误差,提升模型性能。在技术应用测试中,AI模块显示了出色的缺陷检测能力,对输电线路安全运行具有重要意义。本文还探讨了AI模块在巡检过程中的实际应用效果。研究结果表明,基于无人机机载AI模块研究的架空输电线路巡检技术在实际应用过程中效果较好,能够满足预期需求。
参考文献
[1]刘宏杰,陈泊远.基于无人机低空摄影技术的架空输电线路智能巡检方法[J].电工技术,2024(3):80-83.
[2]鲁杰,陈建,宁岩,等.基于人工智能的输电线路无人机巡检技术分析[J].中国高新科技,2022(16):44-46.
[3]严峻超,徐建军,徐军波,等.基于“一线两向”模式下的无人机输电线路高效巡检方式研究[J].电子制作,2023,31(12):106-109.
[4]朱涛,朱伟,石一辉,等.基于无人机集群控制输电线路巡检技术研究[J].电力设备管理,2024(4):114-116.
[5]刘振华.架空输电线路无人机远程自主巡检关键技术研究和应用[J].中文科技期刊数据库(全文版)工程技术,2022(6):153-156.
[6]闻洪峰.基于AI技术的无人机机载前端智能识别技术研究[J].信息技术与信息化,2023(5):208-211.
猜你喜欢
科学与财富(2016年21期)2017-03-02 18:53:29
中国新通信(2016年23期)2017-03-01 11:52:48
中国高新技术企业(2016年34期)2017-02-10 23:09:05
中国科技博览(2016年25期)2016-12-20 20:01:42
科学与财富(2016年26期)2016-12-01 21:42:16
人间(2016年26期)2016-11-03 17:52:40
中国科技博览(2016年22期)2016-11-01 18:10:31
中国科技博览(2016年19期)2016-10-19 13:13:13
科技视界(2016年22期)2016-10-18 14:30:27
科技视界(2016年21期)2016-10-17 19:56:58