C-NCAP、E-NCAP两种主动安全评价规程研究
2024-12-20 00:00:00杨仕昆刘文彬马文博
专用汽车 2024年12期






摘要:随着人工智能技术的快速发展,主动安全技术及其相关系统在汽车领域也得到了广泛应用,而该项技术的安全性与可靠性在新车发布前要进行系统性的评价。当前主要参考的具有权威性的评价规程分别为C-NCAP与E-NCAP,前者为国内新车评价规程,后者为欧洲新车评价规程,由于中欧汽车标准、道路交通事故实际情况等方面存在差异,致使二者的评价规程也存在一定差异。据此,主要就二者的主动安全板块评价规程进行对比分析,旨在得出现阶段C-NCAP(2024)与E-NCAP(2023)之间的差异及各自的特点与优势,为C-NCAP在主动安全板块的未来发展提供一定的参考。
关键词:C-NCAP;E-NCAP;主动安全;评价规程研究
中图分类号:U461 收稿日期:2024-09-15
DOI:10.19999/j.cnki.1004-0226.2024.12.002
1 前言
当前,主动安全技术的发展与应用在汽车智能化发展过程中非常迫切且重要。据我国公安部最新数据显示:截至2024年6月,我国机动车数目总量达至4.4亿辆,其中汽车数量占比为84.03%,机动车驾驶人数目总量达至5.32亿人,其中汽车驾驶人数量占比93.23%[1],2023年我国道路交通事故发生数量共计24.23万起,万辆死亡人数为1.38人[2],而现阶段车辆主要通过搭载主动安全系统,如自动紧急制动(AEB)、车道辅助保持(LKA)等来提高车辆的安全性与可靠性,从而降低事故的发生率。
主动安全评价内容在E-NCAP总体评价规程中占比达20%,C-NCAP中占比达31%约为整体评价规程的1/3。溯其根源,C-NCAP的建立源于E-NCAP,我国基于E-NCAP并结合国内的道路交通事故实际情况、中国交通事故深入研究(CIDAS)数据、汽车标准以及现阶段的技术发展状况建立了适用于我国汽车行业发展的C-NCAP[3]。
综上,针对国内外新车评价规程中的主动安全板块内容开展对比分析,以期对我国新车评价规程的进一步发展提供一定的参考价值。
2 主动安全板块总体差异
2.1 项目组成
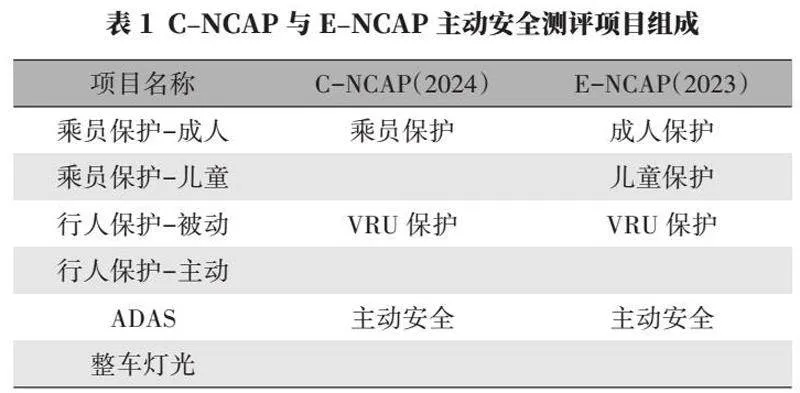
由于各国所制定实施的汽车标准、各项法规道及路交通事故实际发生情况差异,致使C-NCAP与E-NCAP主动安全板块在项目组成上具有一定的差异,如表1所示。本文在无特殊说明的情况下,C-NCAP均指2024版,E-NCAP均指2023版。
2.2 C-NCAP与E-NCAP项目组成差异分析
由表1可知,在整体组成上C-NCAP相较于E-NCAP[4]除制定了高级辅助驾驶(ADAS)相关项目评价规程外,还额外制定了整车灯光评价规程且该项目占C-NCAP主动安全板块整体得分率的28.6%[5]。该项目基于我国的实际道路情况、车辆灯光智能化技术发展及相关安全需求搭建并形成了C-NCAP自身的照明安全评价体系,该体系在一定程度上也影响了照明安全及其相应的灯具设计标准的发展。
值得注意的是,除上述主动安全板块外,在VRU保护板块同样也存在部分主动安全技术测评内容,故为全面对比二者在主动安全上的差异,本文对该部分内容亦做具体分析。
3 主动安全板块测评场景差异
3.1 主动安全测评场景差异
由表2可知,二者主动安全板块测评场景合计为20项,其中C-NCAP涉及16项,E-NCAP涉及13项,显著差异项为11项。本文主要针对表2中的显著差异项进行具体分析。
3.1.1 AEB 车对车场景差异
在该场景中C-NCAP相较于E-NCAP缺少CCRm、CCRb、CCFhol、CCFhos这4项场景测评,但具备CCRh、C2Cscpo2项场景测评,其原因分析如下:
a.前车缓慢移动追尾(CCRm)、前车制动追尾(CCRb)场景在我国道路交通事故中发生概率较低且这两项场景相对简单,同时,为简化相关企业认证成本,在C-NCAP中未作要求。
b.车辆间正向碰撞(CCFho)场景在我国实际道路交通事故中并不常见,且该场景测评较为繁琐,成本较高,在C-NCAP中未建立该场景的评价规程。
c.高速公路追尾事件(如故障车辆、清洁车辆在被前车遮挡的情况下,前车突然切出行驶车道导致碰撞)在我国道路交通事故中频繁发生,为有效避免该类事故,C-NCAP中建立了高速直行车辆追尾前车静止车辆(CCRh)场景,并以此推动V2X技术在车辆中的应用,使得车辆预先得知前方道路情况,及时做出反应与规划,以避免高速且近距离状态下AEB无法及时响应并刹停的情况发生。
d.我国道路在实际使用过程中常存在路边停车的情况,因而在交叉路口存在遮蔽物的场景十分常见。该场景易导致交通事故的发生,故在C-NCAP中除交叉路口直行车辆与垂直路径穿行车辆碰撞(C2Cscp)外还建立了在障碍物遮挡情况下交叉路口直行车辆与垂直路径穿行车辆碰撞的场景(C2Cscpo)。
此外,对于CCRs、CCFT/CCFtap、C2Cscp/CCCscp等共有测评场景,二者在测试条件/变量上有着一定的差异,详情如表3所示。由表3可知,在CCRs场景下,C-NCAP试验工况颇为简单,AEB功能测试在VUT=[20∶10∶40]km/h,偏置率=[-50%,50%]前提下进行,组合工况数量为6,FCW功能测试组合工况书为8,故该场景总工况数为14。E-NCAP测试工况更为细致,其AEB和FCW功能测试分两种情况,即车辆同时搭载AEB和FCW、仅搭载AEB/FCW。同时搭载AEB和FCW时,AEB测试工况为VUT=[10∶5∶50]km/h,偏置率=[-50%∶25%∶50%]组合工况数为45,FCW测试工况为VUT=[50∶5∶80]km/h,偏置率=[-50%∶25%∶50%]组合工况数为30,该场景在同时搭载AEB与FCW时总测试工况数为75。
由上述结果可知,相同CCRs场景下E-NCAP测试工况数量约为C-NCAP的5倍。
同理,在CCFT/CCFtap、C2Cscp/CCCscp场景下E-NCAP测试工况数量均高于C-NCAP。由此可知,在AEB车对车场景下C-NCAP的测试工况数量少于E-NCAP,该原因主要为C-NCAP在相关场景工况设置中综合考虑了我国交通事故的实际发生概率与企业认证成本等因素。
3.1.2 AEB误作用差异
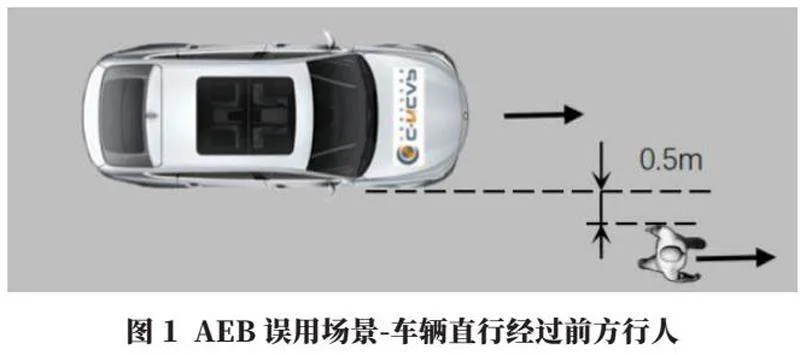
AEB作为车辆主动安全的关键技术之一,其功能释放的准确性与有效性对于行车的安全性、流畅性以及用户的信任度有着密切的关系。因此,C-NCAP将其纳入评价规程,涵盖了常见的车辆直行经过前方行人(图1)、车辆直行经过对向自行车(图2)等10个测试场景,详见表4,以此测评车辆的AEB相关功能的有效性和准确性,进而帮助企业设定高质量的AEB触发条件,提高行车的安全性与流畅性。目前E-NCAP未将该部分内容纳入评价规程中去。
3.1.3 可选审核项差异
相较于E-NCAP,C-NCAP针对不同配置车辆设立了不同审核项,共计6项,而E-NCAP仅设立了2项,详见表5。由表5可知,C-NCAP除LDW、BSD审核项外,还建立了TSR、ISLS、DOW、RCTA四项审核项进一步提升了车辆安全性能的评估标准。
3.2 VRU-AEB测评场景差异
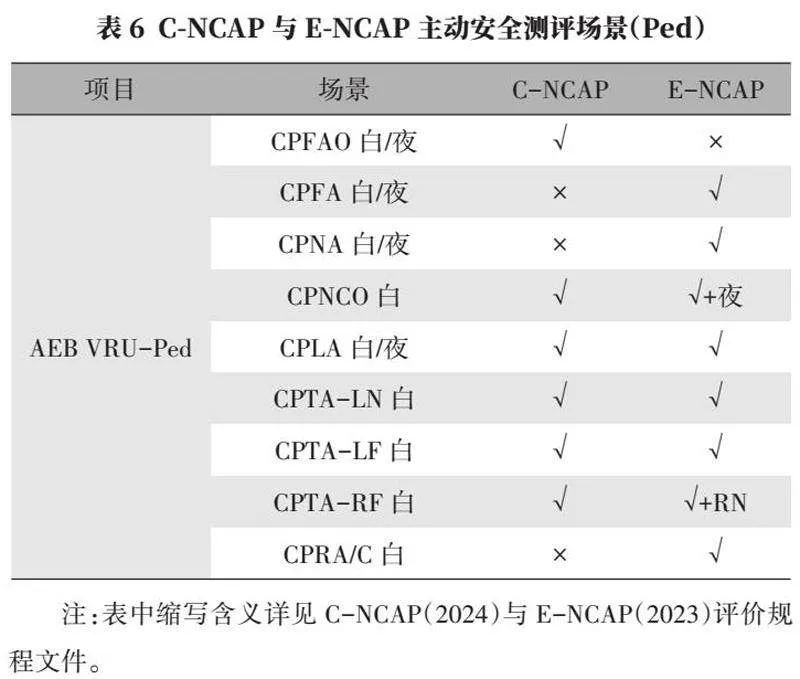
C-NCAP与E-NCAP在弱势道路使用者保护(VRU)板块均包含了部分主动安全测评内容,主要分车辆对行人自动紧急制动测评(AEB VRU-Ped)与车辆对两轮车自动紧急制动测评(AEB VRU-TW)两部分,详细测评场景见表6与表7。
3.2.1 AEB VRU-Ped差异
AEB VRU-Ped主要针对弱势道路使用者(行人),进行了多场景的自动紧急制动系统性能测评,详细场景如表6所示。由表6可知,行人紧急制动测评共包含10个场景,其中有6项具有较为显著的差异,相关分析如下:相较于E-NCAP,C-NCAP在行人横穿道路场景中加入了遮挡条件即遮挡情况下车辆碰撞远端行人(CPFAO),该场景相较于车辆碰撞远端行人场景,要求更为严苛也更加符合我国的实际道路情况,故未将CPFA与CPNA纳入规程中;遮挡条件下儿童横穿道路场景(CPNCO),C-NCAP中缺少了夜间场景测试;车辆右侧转弯缺少了近端碰撞测试场景(CPTA-RN);C-NCAP缺少车辆后方行人穿行或静止碰撞场景。
此外,综合二者各场景的偏置率来看E-NCAP相对要更加全面,覆盖了25%、50%、75%偏置碰撞场景。
3.2.2 AEB VRU-TW差异
除上述行人测试场景外,C-NCAP与E-NCAP均将自行车、电动车、摩托车纳入了评价规程,值得注意的是,C-NCAP中所测试的两轮车主要为电动自行车、踏板式摩托车,并未使用普通脚踏式自行车作为测试对象,该原因系我国二轮车事故比例达至54%,其中电动自行车占比要远高于脚踏式自行车,使用电动自行车作为主要测试对象更加符合我国的真实道路情况,二者详细测试场景如表7所示。
由表7可知,两轮车自动紧急制动测评共包含14个场景,其中显著差异12项,具体分析如下:C-NCAP相较于E-NCAP,在车辆直行与前方穿行的自行车碰撞测试场景中C-NCAP纳入了遮挡情况下的近端场景(CBNAO),主要为还原我国实际道路安全事故中的“鬼探头”现象,以更好地评价对应功能在我国道路中应用的安全性与可靠性,E-NCAP则更加全面;新纳入了踏板摩托车与车辆直行/转弯碰撞场景;未纳入摩托车相关测试场景。
4 主动安全板块评分差异
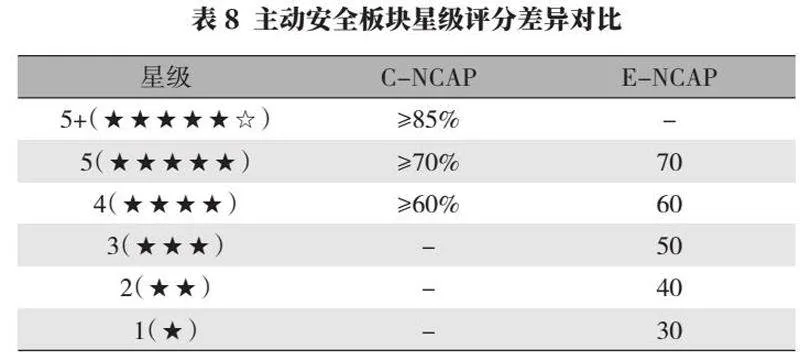
在主动安全板块整体评价方面,C-NCAP与E-NCAP存在一定差异,从评价星级上看C-NCAP相较于E-NCAP新增了5+级评分标准,如表8所示,当该板块的整体得分率达至85%及以上时,对应的主动安全板块则可得最高级评分:5+星级,使得C-NCAP在主动安全板块有了更高的评价标准,在一定程度上能够影响及提升车辆的主动安全性能,有利于车辆安全性能的提升。
5 结语
本文对C-NCAP(2024版)与E-NCAP主动安全板块的项目组成、测评场景及评分标准进行了分析并得出以下结论:
a.C-NCAP相较于E-NCAP,引入了整车灯光项目针对车辆的照明安全测评方法及标准进行了详细的设计与定义。
b.在测评场景方面,C-NCAP去除了部分不适用于我国现阶段道路交通事故实际情况及汽车标准的测评场景,如CCRm、CCRb、CCFho等,新建立了部分符合我国现阶段道路交通事故实际情况及汽车标准的测评场景,如CCRh、C2Cscpo,并前瞻性地引入了V2X通信技术测评场景。
c.在VRU-Ped与VRU-TW方面,C-NCAP结合我国道路交通的实际情况,建立了相关测评场景,可有针对性地评价被测车辆的安全性能与可靠性。
d.在结果评价方面,C-NCAP在5星评价的基础上增加了5+星评价,并设立了对应的评价标准,在一定程度上影响了车辆主动安全相关技术的发展,有利于提升车辆的安全性能。
综上,E-NCAP设立的场景及其相应的测试工况,更加适用于欧洲的道路情况与汽车行业发展现状。C-NCAP随着国内相关研究人员对我国道路交通事故实际情况、汽车标准、汽车技术发展等研究工作的不断深入,C-NCAP在E-NCAP的基础之上结合了CIDAS数据,开展了专项事故场景研究进行持续迭代,逐步融合了我国汽车行业的发展特点并形成了适用于我国汽车行业发展现状的评价规程。
参考文献:
[1]政务全国机动车达4.4亿辆驾驶人达5.32亿人[EB/OL].[2024-09-18].https://www.gov.cn/zhengce/jiedu/tujie/202407/content_6962004.htm.
[2]中华人民共和国2023年国民经济和社会发展统计公报[EB/OL].[2024-09-18].https://www.stats.gov.cn/sj/zxfb/202402zxfb/202402/ t20240228_1947915.html.
[3]王凯,郑艳婷,张长江.E-NCAP和C-NCAP侧面碰撞标准区别及影响分析[C]//2020中国汽车工程学会年会论文集(4),中国汽车工程学会,中国汽车技术研究中心有限公司,2020:5.
[4]EURO-NCAP-AEB-C2C-TEST-PROTOCOL[S].
[5]C-NCAP管理规则(2024版)[S].
作者简介:
杨仕昆,男,1997年生,助理工程师,研究方向为智能网联汽车测试评价。