
基于模糊T⁃S型内模PID控制算法的无刷直流电机仿真分析
2024-12-18 00:00:00孙崇智吴永伟安建民杨佳郭伟伟
现代电子技术 2024年24期
关键词:无刷直流电机













摘" 要: 针对无刷直流电机(BLDCM)双闭环控制调速系统的控制响应速度慢、转速波动较大等问题,提出一种模糊神经网络与内模控制相结合的驱动方式。该方式利用Matlab/Simulink来构建一种基于BLDCM和控制器的电梯一体式限速器仿真模型,得到BLDCM的速度、转矩响应曲线。仿真分析和实验结果均表明,模糊T⁃S型内模 PID控制算法在响应速度、转速误差、抗干扰能力和控制精度等性能方面优于内模PID控制算法与常规双闭环PID控制系统。该研究可为模糊神经网络T⁃S型内模PID算法在电梯一体式限速器上的应用积累经验。
关键词: 无刷直流电机; 模糊T⁃S; 内模PID控制; 双闭环控制系统; 模糊神经网络; 电梯限速器
中图分类号: TN876⁃34; TM33; TP18" " " " " " " 文献标识码: A" " " " " " " " " "文章编号: 1004⁃373X(2024)24⁃0018⁃07
BLDCM simulation analysis based on fuzzy T⁃S internal model PID control algorithm
SUN Chongzhi, WU Yongwei, AN Jianmin, YANG Jia, GUO Weiwei
(Gansu Province Special Equipment Inspection and Testing Institute, Lanzhou 730050, China)
Abstract: A driving method combining fuzzy neural network and internal model control is proposed to address the problems of slow control response speed and large speed fluctuations of brushless DC motor (BLDCM) dual closed⁃loop control speed regulation system. In this method, Matlab/Simulink is used to construct the simulation model of elevator integrated governor based on BLDCM and controller, and the speed and torque response curves of BLDCM are obtained. The simulation analysis and results show that fuzzy T⁃S (Takagi⁃Sugeno) internal model PID control algorithm is superior to internal model PID control algorithm and conventional double closed loop PID control system in response speed, speed error, anti⁃interference ability and control precision. This research can accumulate experience for the application of fuzzy neural network T⁃S internal model PID algorithm in elevator integrated speed limiter.
Keywords: brushless DC motor; fuzzy T⁃S; internal model PID control; double closed loop control system; fuzzy neural network; elevator governor
0" 引" 言
一体式电梯限速器是集动力输出、转速控制等功能于一身的电梯限速器的校验装置,具有减轻电梯检验人员工作强度,缩短校检时间,使检验过程更加精准、高效、安全,进一步增强握持舒适度等优点。而无刷直流电机(BLDCM)是一体式电梯限速器重要的核心驱动装置,由电机主体和驱动器共同构成的一种同步电机。因其具备体积小、重量轻、惯性小、寿命长、转速高、噪声低、运行稳定、维护方便及可精确控制启停等优点,逐渐成为一体式电梯限速器智能检测工具设计研发的首要选择,被广泛应用于电梯制造业、工业控制以及航空宇航等诸多领域[1⁃3],现已成为工业驱动系统中常用电机之一。
近年来随着BLDCM先进控制算法研究的不断深入,模糊神经网络、内模控制、自适应模糊神经网络[4⁃6]、神经网络控制遗传算法[7⁃8]等新型人工智能控制算法已成为当前智能控制领域中的主要研究热点之一。
T⁃S(Takagi⁃Sugeno)型模糊神经网络由模糊系统与神经网络构成,基于模糊逻辑,通过此系统能解决非线性系统的局部线性化的问题[9⁃12]。由于T⁃S型模糊推理结构计算简单、数学分析方便,更易于与PID控制、自适应控制等其他智能控制方法结合,使其具有更强的自学习能力和逻辑推理能力。
常规双闭环PID调速系统控制算法简单实用,常表现出自适应能力弱、调节时间长、控制响应不及时等情况,不能满足高精度控制发展趋势的要求;而内模控制(IMC)能明显减少上述复杂特性[13]。内模控制是一种基于过程数学模型的控制策略,对被控对象的数学模型准确度要求较低、设计简单、系统跟踪响应速度快、超调量小、便于系统分析,能较好地过渡突发扰动[14⁃16]。文献[17]提出模糊内模PID控制;文献[18]将模糊控制引入到内模PID中,使控制参数能够在一定程度上实现自调节;文献[19]在内模控制的基础上引入神经网络算法,进一步提高了控制系统的自适应能力。
本文在常规BLDCM双闭环PID控制算法的基础上,重新设计了一种模糊T⁃S型内模PID控制算法。该算法兼融自学习、自适应能力的模糊神经网络控制,能较好地结合PID控制算法,并通过模拟软件Matlab R2018b/Simulink对该理论控制算法进行了4种工况下的仿真模拟。仿真结果证明了模糊T⁃S型内模PID控制理论算法的优越性,并提供实验平台验证该算法控制的有效性。将该控制算法应用到电梯一体式限速器中,可以实现电机转速响应的快速性、超调的可控性等要求。
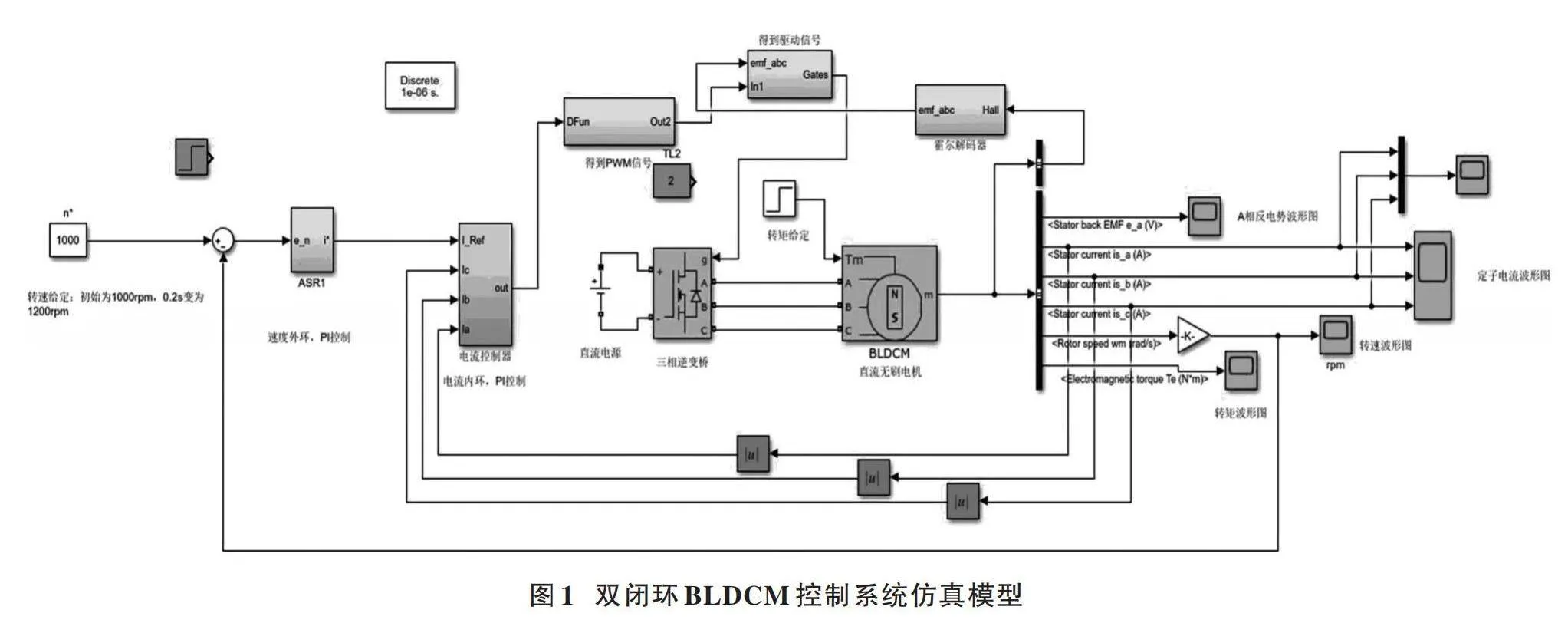
1" 双闭环控制系统
本文采用的双闭环BLDCM控制系统仿真模型如图1所示。仿真模型包括速度、电流模块、三相逆变器、霍尔解码器和信号检测等模块,其中三相逆变器将直流输入转换为三相交流输出,霍尔解码器确保开关不会因输入信号中的噪声而振荡或打开和关闭,将开关阈值调整到信号上升沿的稍高点和信号下降沿的稍低点。
2" 模糊神经网络控制器
2.1" T⁃S模型
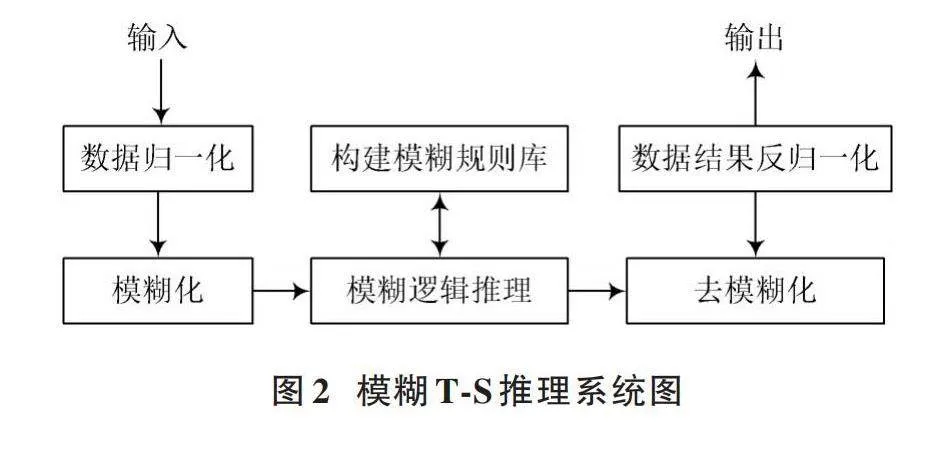
本文采用T⁃S模型,模糊T⁃S推理系统图如图2所示。对模糊系统的输入数据值进行数据归一化、模糊化、模糊逻辑推理、去模糊化和数据结果反归一化等操作,得出明确的输出结论:该模糊模型具有强大的自适应能力,可不断修正模糊子集的隶属度函数。
2.2" 内模PID模型
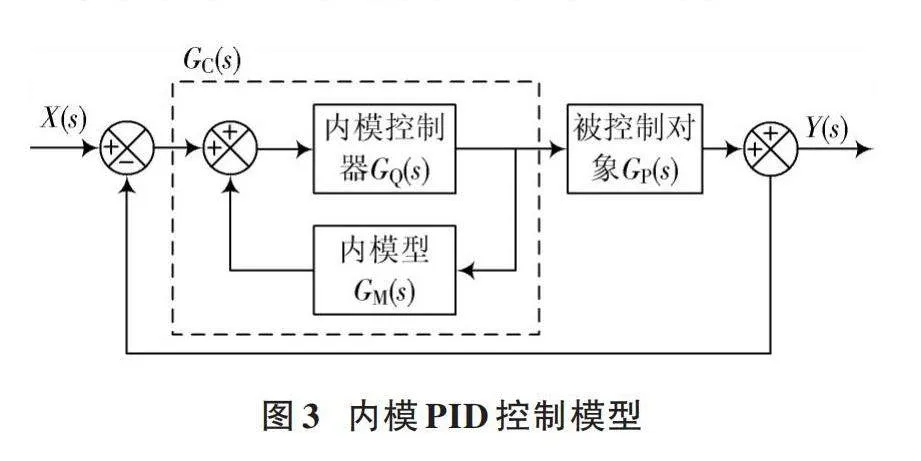
内模PID模型的内部模型用于预测被控制对象的输出并加以校正,内模控制器用于调节控制量,使生产过程的输出跟踪控制系统的给定值,滤波器用于改善控制系统的鲁棒性。设计构造内模控制的等效反馈模糊控制器[GCs],求解基于内模控制原理的PID控制器的各个参数。内模PID控制模型如图3所示。
等效反馈控制器[GC(s)]的公式为:
[GC(s)=GQ(s)1-GQ(s)GM(s)] (1)
标准PID的传递函数为:
[C(s)=KP1+1TIs+TDs]" " " " "(2)
式中:K是静态增益;T为时间常数。
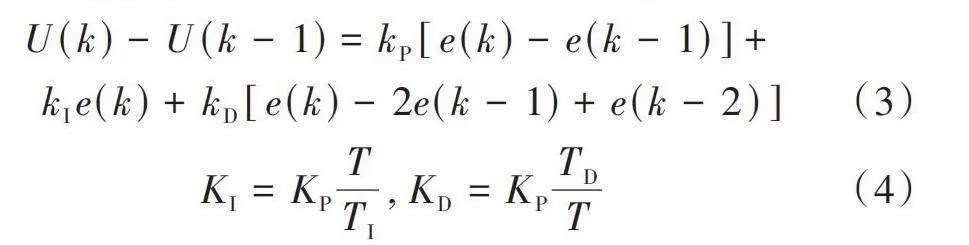
本文选用增量式PID算法,其表达式为:
[U(k)-U(k-1)=kP[e(k)-e(k-1)]+" kIe(k)+kD[e(k)-2e(k-1)+e(k-2)]]" "(3)
[KI=KPTTI, KD=KPTDT]" (4)
式中:k为采样次数;[U(k)-U(k-1)]为控制增量;[e(k)]为k次采样时的偏差值;[U(k)]为k次采样时调节器的输出;[kP]为比例系数[19]。
2.3" 模糊T⁃S型内模PID理论与控制模型
本文选用的模糊T⁃S神经网络结构图如图4所示。
前件网络第1层为输入层,输入矢量 [x=[x1,x2,…,xn]T],该层节点总数[20]为[N1=n]。
前件网络第2层是计算隶属度函数,本文选用高斯函数,则:
[uji=e-(xi-Cij)2σ2ij] (5)
式中[Cij]和 [σij]分别表示隶属度函数的中心值和宽度,其中[i=1,2,…,n,j=1,2,…,mi],n为输入量的维数,[mi]是[xi]的模糊分割数[21]。该层节点总数为[N2=i=1nmi]。
前件网络的第3层是模糊规则,本文以模糊算子为连乘算子:
[ω=uAj1(x1)uAj2(x2)…uAjn(xn)," j=1,2,…,m] (6)
该层节点总数为[N3=m]。
前件网络第4层是对公式(6)进行归一化计算:
[ω=ωji=1nωi," j=1,2,…,m]" " " " " (7)
后件网络第1层为零节点的输入值,本文选用:
[x0=1] (8)
后件网络第2层为模糊模型的输出值[yij],即:
[yij=l=1rpijnxl," j=1,2,…,m;i=1,2,…,n] (9)
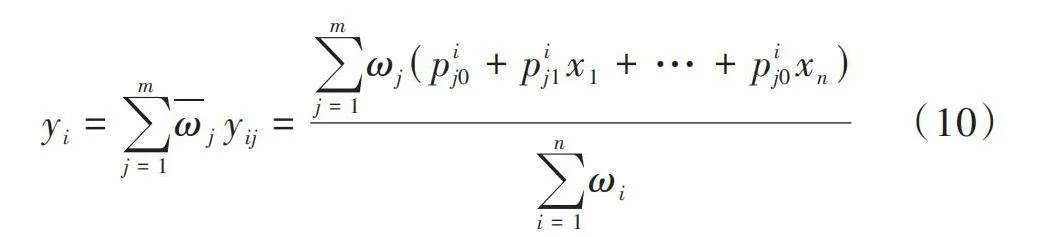
后件网络第3层第i([i=1,2,…,n])个输出为:
[yi=j=1mωjyij=j=1mωj(pij0+pij1x1+…+pij0xn)i=1nωi] (10)
式中:[pijn]是网络连接权值;[yi]为所有规则后件的权重总和[22]。
在模糊神经网络T⁃S中将连接权值[plji]、中心值[Cij]和宽度值[σij]进行优化。本文基于增量学习规则[23]进行优化,目标函数为:
[E=12[X(k)-Y(k)]2]" "(11)
式中:[X(k)]为BLDCM的设定转速;[Y(k)]为BLDCM的实际转速。
[Plji(k+1)=Plji(k)-β∂E∂Plji,i=1,2,…,n;j=1,2,…,m;l=1,2,…,r] (12)
[Cij(k+1)=Cij(k)-β∂E∂Cij] (13)
[σij(k+1)=σij(k)-β∂E∂σij,βgt;0;i=1,2,…,n;j=1,2,…,mi] (14)
本文在模糊T⁃S神经网络的基础上结合内模PID算法,设计出模糊T⁃S型内模PID控制器,其结构图如图5所示。此控制器可实现PID控制参数的自动调整,以x1偏差e(BLDCM设定转速与BLDCM实际转速之差)与x2偏差变化率ec作为输入[24],并经过模糊神经网络T⁃S模糊化运算,得到n′(KP、KI、KD)作为等效反馈控制器的参数。
3" 系统仿真与分析
3.1" 建立模糊T⁃S型内模PID控制模型
基于上述理论,本文在 Matlab R2018b/ Simulink[25⁃26]平台下建立模糊T⁃S神经网络内模PID算法控制模型。本文中采用BLDCM的参数为:电枢绕组电阻[R=3" Ω],极对数 [Pn=6],电枢绕组电感[Lq=1.25" mH],转动惯量[J=0.167×10-4 kg·m2],额定转速N=1 000 r/min。模糊神经网络T⁃S设定参数为[β=1],[Cij]和 [σij]由随机函数得到。
3.2" 结果与分析
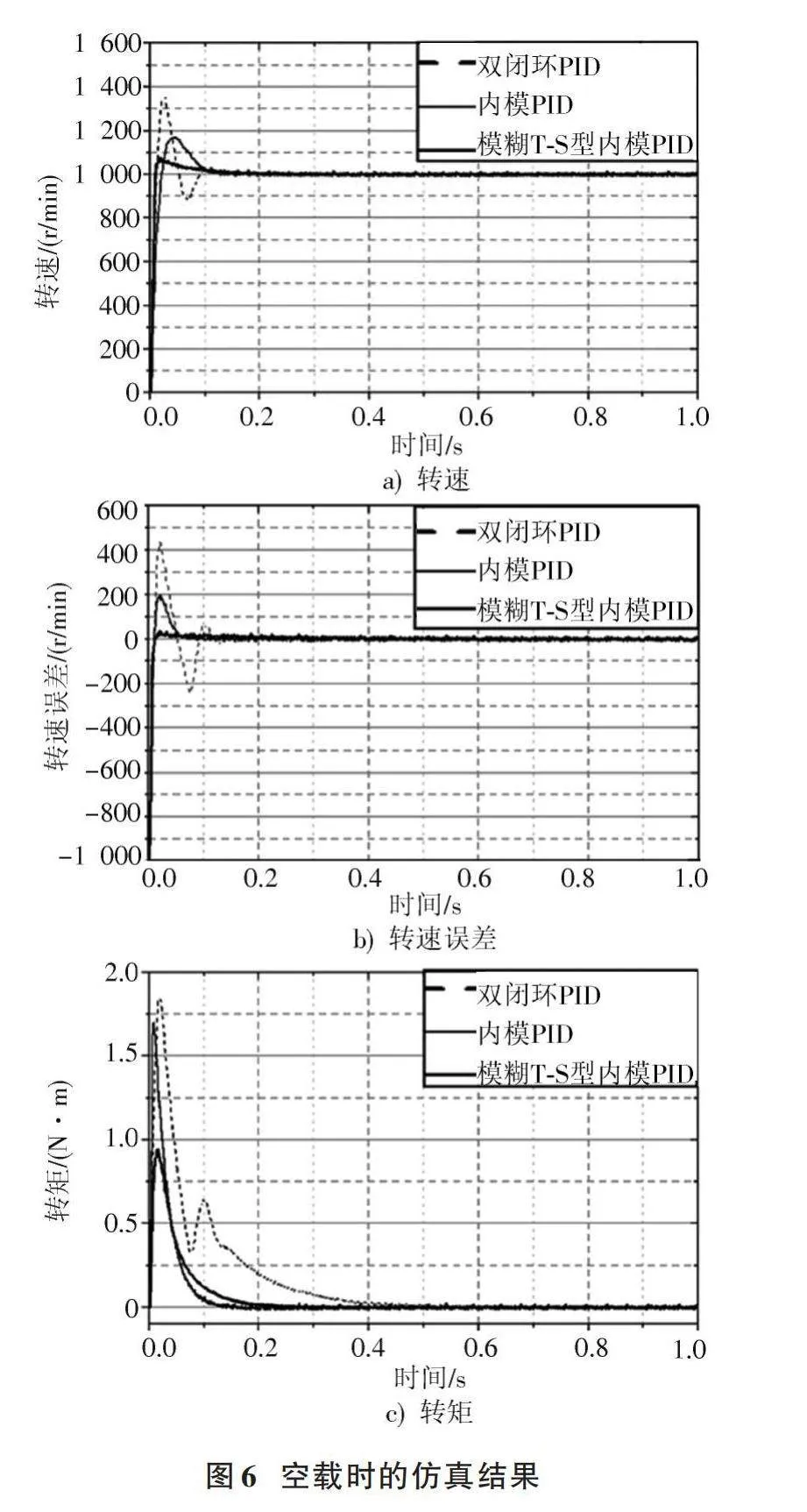
试验工况1:设额定转速N=1 000 r/min,空载。常规双闭环PID、内模PID控制与模糊T⁃S型内模PID控制算法仿真对比结果如图6所示。
从图6可以看出:常规双闭环PID、内模PID控制算法控制下的电机会产生较大超调量,速度误差较大,响应时间长,转矩脉动幅度较大;相比上述两种算法,模糊T⁃S型内模PID控制算法几乎无超调,转速误差小,转矩脉动幅度低,响应速度快。
试验工况2:运行转速阶跃仿真模型。设定实验条件为额定转速N=1 000 r/min,空载启动,在t=1.0 s突变为N=1 400 r/min,仿真结果如图7所示。
从图7可知:当转速阶跃时,模糊T⁃S型内模PID控制算法的响应速度更快;3种算法下的转速误差依次呈逐渐减小趋势,而模糊T⁃S型内模PID 控制算法能使系统迅速恢复至设定值且转矩波动幅度小。
试验工况3:运行负载转矩仿真模型。设定实验条件额定转速N=1 000 r/min,空载启动,在时间t=1.0 s时突加负载,转矩由0变为5 N·m,仿真运算结果如图8所示。从图8可知,在t=1.0 s时,突加负载5 N·m,模糊T⁃S型内模PID控制算法的转速能较好地与电机实际转速相符合,转速误差和转矩波动均较小,且响应迅速。因此,对负载干扰而言,模糊T⁃S型内模PID控制算法的BLDCM速度控制系统表现更优。
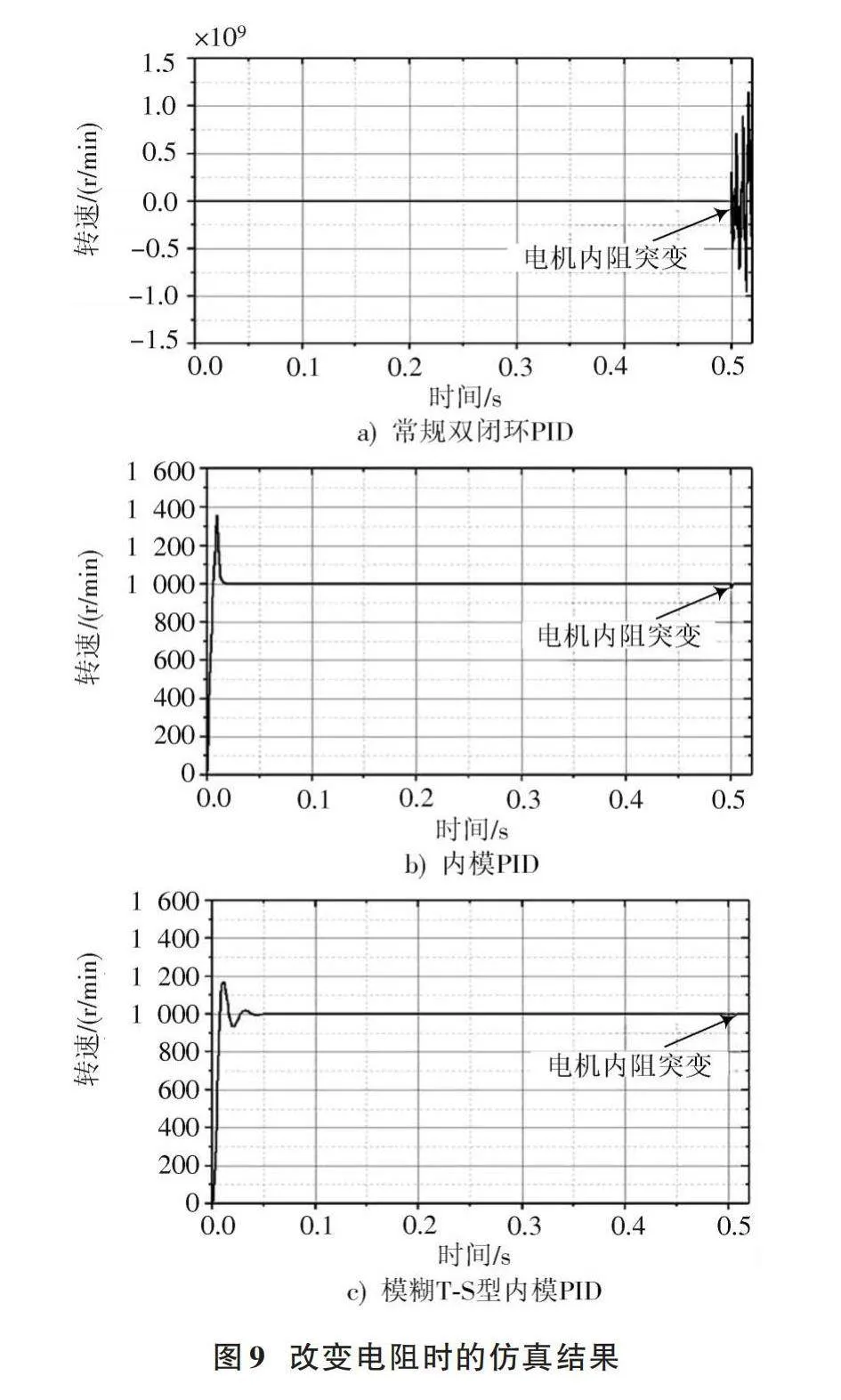
试验工况4:运行电阻变化仿真模型。为模拟电机运转时随温度的变化,改变电阻R的大小,R由3 Ω增大到6 Ω,观察波形,如图9所示。
从图9看出:常规双闭环PID波形在0.5 s后出现了发散,转速极不稳定;而模糊T⁃S型内模PID控制算法波形无变化,说明其鲁棒性要优于其他两种PID算法。
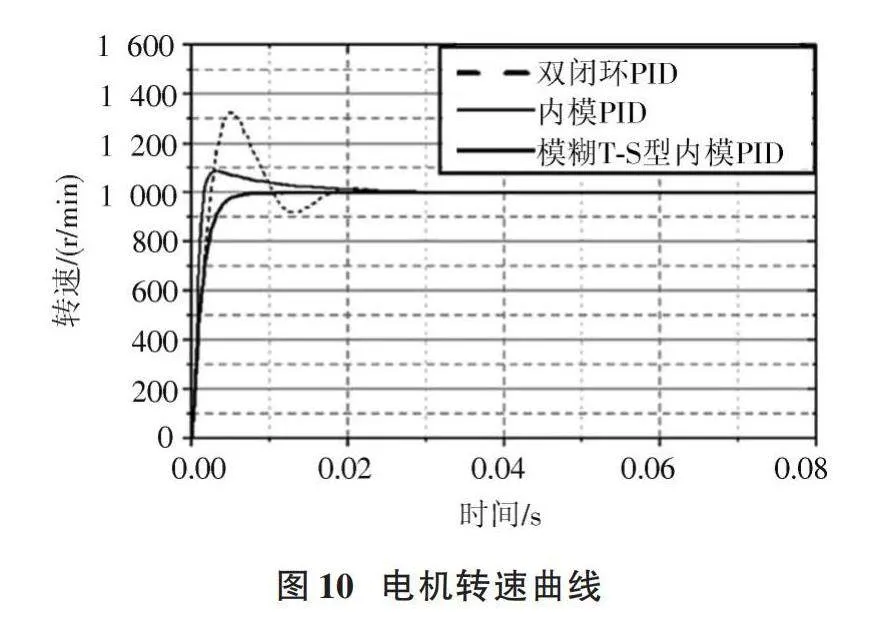
4" 实验结果
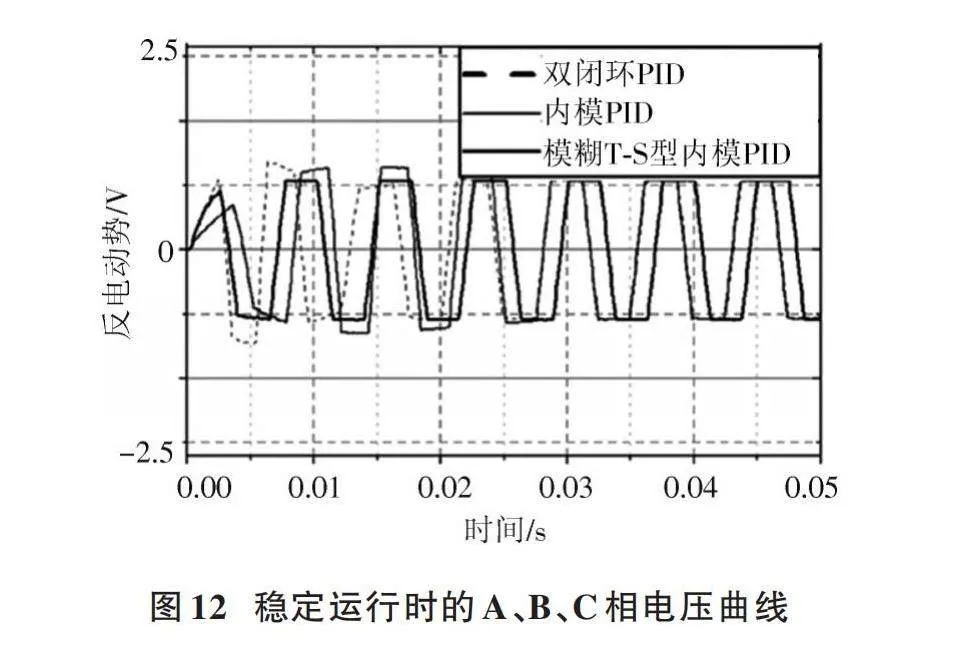
为进一步验证模糊T⁃S型内模PID算法下BLDCM的控制效果,设置与仿真实验工况1一致,电机空载启动,转速设为N=1 000 r/min。本文基于32位浮点的微处理器(Digital Signal Processor, DSP)核心部件TMS320F28335搭建控制电机实验硬件。运用在线编码器监测电机转子实时位移,经上位机计算得到电机转速并将其保存到应用软件CCS6.1中。图10为电机转速曲线,图11为稳定运行状态时的A、B、C相电流曲线,图12为稳定运行状态时的A、B、C相电压曲线,图13、图14为电机的加减速曲线。由图10、图13、图14可以看出,模糊T⁃S型内模PID控制下的电机无超调量,上升时间短、调节时间短、稳态无静差,具有良好的动态响应速度。由图11、图12可分析出模糊T⁃S型内模PID控制下的电机转速达到设定值后,波动幅值小,A、B、C三相电流(电压)保持正弦波变化,系统能够可靠平稳运行。
5" 结" 语
针对常规双闭环PID控制算法下系统存在的动态响应不及时、转速误差大、抗干扰能力弱等问题,本文提出一种模糊T⁃S型内模PID控制算法,此算法可不依赖于电机系统的精确模型进行控制。该算法融合了神经网络与模糊控制的思想,引入内模PID的控制算法,将偏差和偏差变化率作为控制器的输入,经模糊神经网络T⁃S模糊化,将比例、微分、积分系数的输出作为内模PID控制的输入,在线实时地对PID参数进行调整,以满足不同时刻的变化对PID参数自调节的需求。
仿真模拟结果表明,模糊T⁃S型内模PID算法控制的电机系统转速响应快、转速误差小,具有动态响应快、较强的抗干扰能力和鲁棒性,可适用于非线性、参数变化大、强干扰的不确定性数学模型。在主控芯片DSP的基础上构建实验平台并验证模糊T⁃S型内模PID算法的控制效果,结果证明了该算法的合理性与高效性,可为BLDCM在电梯限速器上的控制提供依据。
注:本文通讯作者为吴永伟。
参考文献
[1] 曹萱,关文卿,罗蕊.基于SVPWM及ADRC算法的无刷电机转矩脉动抑制控制系统研究[J].测控技术,2021,40(1):150⁃156.
[2] 丁一鸣.无刷直流电机高性能控制策略研究[D].西安:西安电子科技大学,2021.
[3] 何建,高志强,谢家雨.基于模糊PID的多电机控制系统仿真[J].电子测试,2019(17):9⁃11.
[4] 孙兆龙,钱翰宁,刘振田,等.基于ARM+FPGA的永磁无刷直流电机控制智能方法[J].海军工程大学学报,2023,35(1):93⁃98.
[5] 刘克平,滕召纬,孙中波,等.基于自适应模糊神经网络的下肢关节角度估计[J].计算机仿真,2022,39(9):456⁃461.
[6] 金爱娟,邵飞旋,严紫光.基于自适应模糊神经网络的感应电机矢量控制[J].电子科技,2022,35(9):65⁃73.
[7] 梁晓峰,刘美钧,李霜,等.小型电动舵机用永磁无刷直流电机设计[J].电机技术,2021(5):10⁃13.
[8] 王伟,王勇,周晨光,等.基于模糊神经网络PID的无人艇航向控制器研究[J].合肥工业大学学报(自然科学版),2023,46(4):458⁃462.
[9] 张永健.基于自适应神经网络模糊推理系统的游客规模预测研究[J].白城师范学院学报,2023,37(2):14⁃20.
[10] 康尔良,蔡松昌.永磁同步电机自构式模糊神经网络控制器设计[J].电机与控制学报,2023,27(3):92⁃101.
[11] 王文庆,孙丽花.区间二型T⁃S模糊研究综述[J].西安邮电大学学报,2022,27(4):64⁃73.
[12] 王佳伟,杨亚非,钱玉恒,等.基于内模控制的工业控制系统仿真器鲁棒PID控制器设计[J].实验技术与管理,2015,32(1):120⁃123.
[13] LEITNE R S, YAZDANIAN M, ZIAEINEJAD S, et al. Internal model⁃based active resonance damping current control of a grid⁃connected voltage⁃sourced converter with an LCL filter [J]. IEEE transactions on power systems, 2018, 33(6): 6025⁃6036.
[14] 王维强,程梁,曾晓松,等.模糊内模控制的永磁无刷直流电机控制研究[J].电机与控制应用,2019,46(6):49⁃54.
[15] YUAN C H, CHITING T, LU Y L. Current control of the permanent⁃magnet synchronous generator using interval type⁃2T⁃S fuzzy systems [J]. Energies, 2019, 9(20): 199⁃203.
[16] LIN Y C, BALAS V E, YANG J F, et al. Adaptive tak⁃agi⁃sugeno fuzzy madel predictive control for permanent magnet synchronous generator⁃based hydrokinetic turbine systems [J]. Energies, 2020, 13(20): 5296.
[17] NATH U M, DEY C C, MUDI R K. Fuzzy rule⁃based auto⁃tuned internal model controller for real⁃time experimentation on temperature and level processes [J]. International journal of automation and control, 2020, 14(2): 239.
[18] 陈彦涛.基于模糊设定值加权IMC⁃PID算法的纸张定量控制[J].包装工程,2018,39(21):157⁃162.
[19] ABDUL W N, MAHMOD N, VILANOVA R. Permeate flux control in SMBR system by using neural network internal model control [J]. Processes, 2020, 8(12): 1672.
[20] 陈浩.化油器过渡孔加工定位控制算法及其硬件设计[D].广州:华南理工大学,2015.
[21] 韩霞.智能非线性控制技术的应用研究[M].镇江:江苏大学出版社,2017.
[22] 钱依凡,薛凌云,洪哲扬.基于STM32的大功率LED阵列高精度制冷控制系统[J].电子技术应用,2021,47(9):75⁃81.
[23] 吴永伟.HMC500卧式加工中心主轴热误差分析及建模[D].兰州:兰州理工大学,2018.
[24] 王培宇,马立新.基于模糊神经网络的永磁同步电机伺服系统研究[J].电子科技,2022,35(6):83⁃88.
[25] 罗小丽,范桂林.无刷直流电机模糊PI控制系统建模与仿真[J].系统仿真技术,2019,15(2):137⁃141.
[26] 刘金琨.先进PID控制Matlab仿真[M].4版.北京:电子工业出版社,2016.
作者简介:孙崇智(1975—),男,陕西绥德人,副高级工程师,从事机电类特种设备检验检测工作,研究方向为机电控制。
吴永伟(1986—),男,甘肃陇西人,硕士研究生,助理工程师,研究方向为机电控制。
猜你喜欢
中国高新技术企业(2017年1期)2017-03-24 10:16:20
电子技术与软件工程(2016年16期)2017-03-17 00:16:29
电子技术与软件工程(2016年20期)2016-12-21 10:37:00
数字技术与应用(2016年9期)2016-11-09 19:19:17
电脑知识与技术(2016年17期)2016-07-23 20:35:07
计算技术与自动化(2016年2期)2016-07-20 19:51:53
科技传播(2016年10期)2016-07-15 23:42:28
物联网技术(2015年12期)2015-12-28 14:19:59
科技视界(2015年27期)2015-10-08 11:38:06
现代电子技术(2014年8期)2014-09-27 10:57:33
