
基于无人机摄影图像的水位测量技术研究
2024-12-08 00:00:00孔庆珠
中国新技术新产品 2024年9期



摘 要:现场测量水位对水利工程和水文预报有重要意义。本研究综合了无人机摄影测量和图像识别技术的优势,提出一种新的测量技术。利用无人机机载相机捕获水体在波动过程中的影像,采用图像识别技术对影像中的水面线进行识别和提取。利用参数校准计算测量段的连续水位,引入校正方法来抵消无人机漂移引起的误差。对某水电站进行现场实测试验,结果证明该方法可靠。
关键词:无人机;摄影;图像识别;水位测量
中图分类号:P 642 " " " " 文献标志码:A
水利工程的水位变化过程是重要的水力指标之一[1]。对于新建大坝和河道工程来说,需要准确地现场测量水位及其表面波动,分析其运行过程,为工程设计提供指导[2]。现场水位测量仪器具有可靠性、经济性、耐久性和实用性等优点[3]。常用仪器包括水位测量尺、浮子式水位计、压力式水位计、超声波水位计和雷达水位计等。对于一些过流建筑物来说,例如溢洪道,为了测量水位波动,需要沿流安装多个仪表,会增加仪表安装的工作量并提高成本。在一些特殊情况下,例如新建水利工程在汛期进行短期野外测量,使用上述仪器的工作量和成本较高,适用性和效率较低[4]。
图像识别是一项自动、智能的技术,已应用于许多水位监测系统,提高了测量效率[5-6]。传统的系统需要配备稳定性强的图像采集装置,这限制了其在复杂条件下的适用性[7-8]。为了克服当前基于图像的水位监测系统的不足[9],本文利用无人机的技术优势和图像识别技术,开发了一种新的基于无人机图像的水位现场测量技术。
1 测量方法
1.1 系数校准
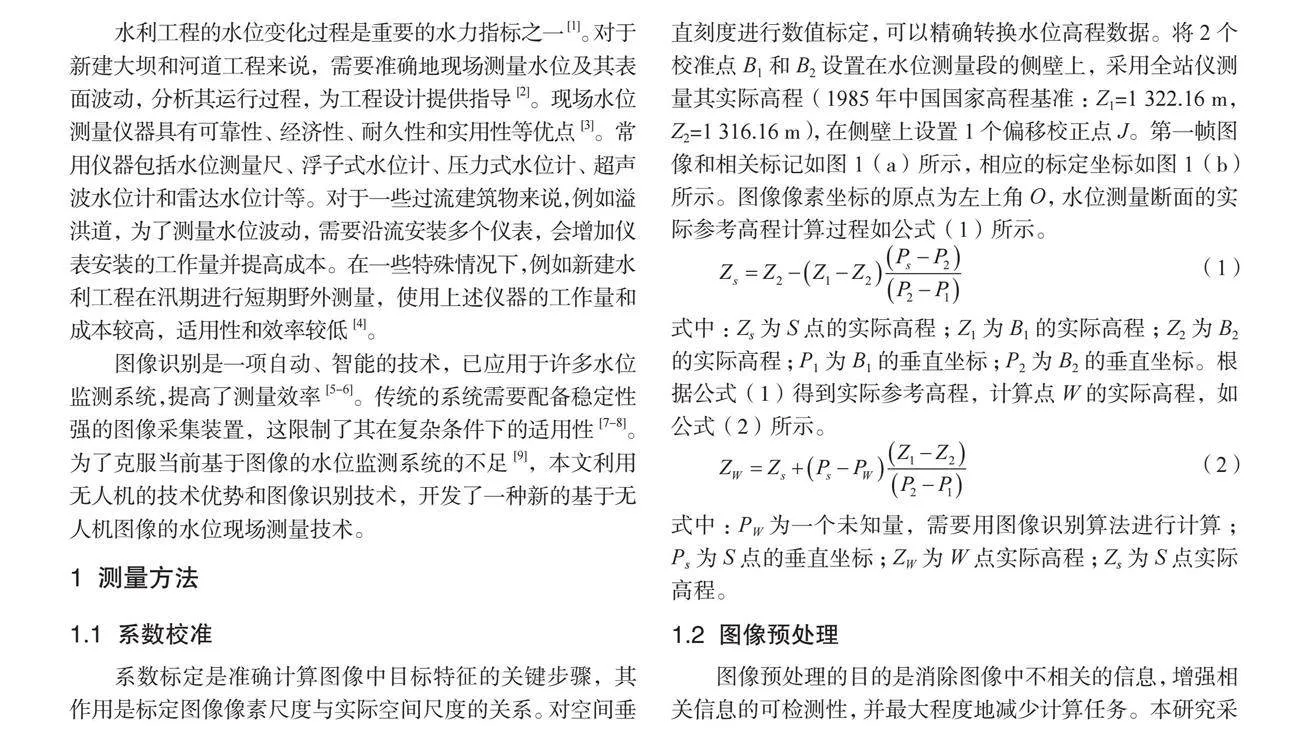
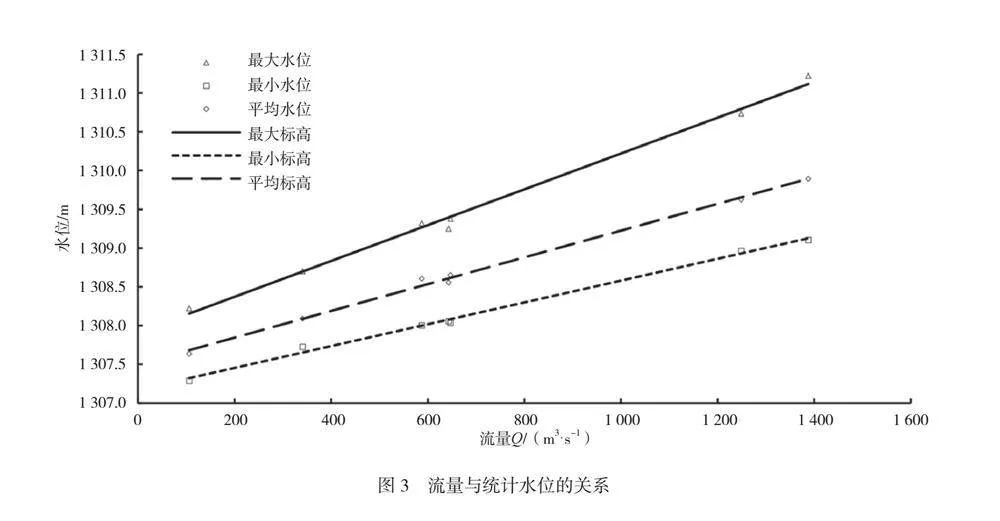
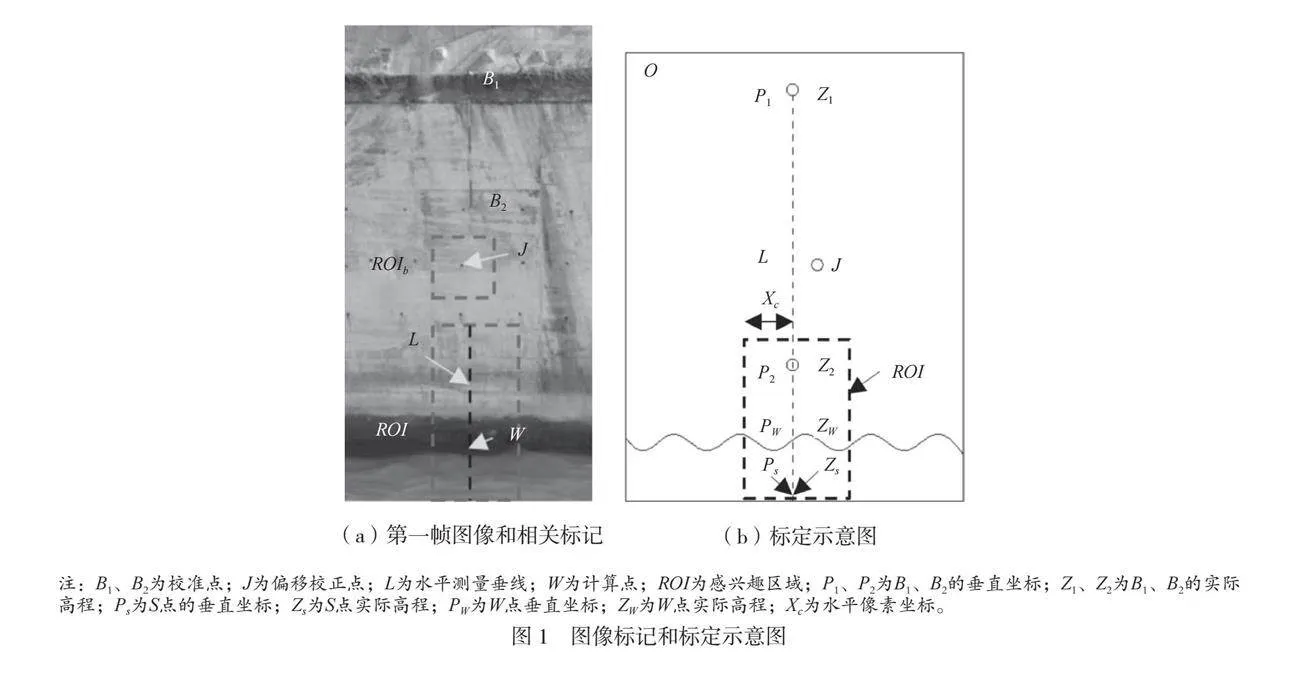
系数标定是准确计算图像中目标特征的关键步骤,其作用是标定图像像素尺度与实际空间尺度的关系。对空间垂直刻度进行数值标定,可以精确转换水位高程数据。将2个校准点B1和B2设置在水位测量段的侧壁上,采用全站仪测量其实际高程(1985年中国国家高程基准:Z1=1 322.16 m,Z2=1 316.16 m),在侧壁上设置1个偏移校正点J。第一帧图像和相关标记如图1(a)所示,相应的标定坐标如图1(b)所示。图像像素坐标的原点为左上角O,水位测量断面的实际参考高程计算过程如公式(1)所示。
(1)
式中:Zs为S点的实际高程;Z1为B1的实际高程;Z2为B2的实际高程;P1为B1的垂直坐标;P2为B2的垂直坐标。根据公式(1)得到实际参考高程,计算点W的实际高程,如公式(2)所示。
(2)
式中:PW为一个未知量,需要用图像识别算法进行计算;Ps为S点的垂直坐标;ZW为W点实际高程;Zs为S点实际高程。
1.2 图像预处理
图像预处理的目的是消除图像中不相关的信息,增强相关信息的可检测性,并最大程度地减少计算任务。本研究采用的图像预处理步骤包括提取ROI、图像灰度处理和二值化等。图像预处理方法包括以下3种。1)提取ROI。从整个图像中由1个框、1个圆等选出特定区域进行处理,该区域称为ROI,ROI可以提高识别准确率和效率。在本文中,图像处理限制在ROI的框中。需要确定ROI中的测量部分L的水平像素坐标Xc。2)图像灰度化处理。无人机拍摄的图像是彩色的(RGB),灰度图像的计算方法是计算彩色图像中每个像素的R、G和B,使用0~255的1个数值来表示像素特征。利用合理的灰度计算方法得到的灰度图像能够在彩色图像中刻画目标,并减少计算任务,提高图像处理效率。本文采用灰度化平均值法得到灰度图像,可以满足后续处理需要。3)图像二值化。为了避免不均匀光照影响图像分割,采用自适应阈值分割方式,计算在像素邻域中像素灰度值的平均值来获得邻域的阈值。调整算法中的阈值参数,划分水体和墙体。分割后图像中水体面积的灰度值为255,水面附近墙体的灰度值为0。
1.3 偏移校正
在抓拍视频的过程中,无人机出现轻微偏移是不可避免的,因此须计算由无人机偏移引起的测量误差,并跟踪校正点的实时坐标,检查当前帧图像与第一帧图像中的校正点之间的坐标偏移。偏移校正过程如图2所示,其具体步骤包括以下4个。1)选择包括校正点(J)的区域为ROIb(以区分上述ROI)。2)识别第一帧ROIb中的校正点(J),计算其质心坐标(XJ0,PJ0),在后续ROIb中将其设为偏移校正的基本坐标。3)识别质心坐标(XJi,PJi)在第i帧图像ROIb中的校准点。4)计算第i帧图像ROIb中校正点坐标与基坐标之间的差值(ΔX,ΔP),其中ΔX=XJi−XJ0,ΔP=PJi−PJ0。
1.4 水位识别
以下方法用于获取W点实际高程。在水平像素坐标Xc的垂直基准线(水位测量断面)上,从下往上判断各像素灰度值是否为0(水和墙壁的灰度值分别为255和0)。当灰度值为0时,表示达到水面的W点,获取W点的像素坐标值(XW、PW)。经过无人机偏移校正后W的真实像素坐标为(XW+ΔX,PW+ΔP),将公式(2)中的PW引入PW+ΔP,得到水面真实高程ZW。依次计算视频各帧中的高程,得到测量断面的水面高程和水面波动过程。当识别最后一帧视频时,计算在采集周期内的最高水位、平均水位和最低水位。
2 工程案例
2.1 工程概述
对某水电站进行短期实地实测,其正常水位为1 408 m(1985年中国国家高程基准),对应库容为6.6亿m3,该水电站主要功能为防洪、发电以及供水。位于溢洪道下游的跌水池是能量耗散和防止河流侵蚀的重要结构,跌水池的水位和水面波动对其设计和运行有重要影响,因此测量溢洪道水位十分重要。其侧壁高度gt;15 m,流速高、水位波动大,测量尺很难安装。需要在短时间内观察水位,其他水位测量仪器价格昂贵,性价比低。水位测量段河道宽度约160 m,对岸没有安装固定摄像机的条件。综上所述,采用本文提出的基于无人机影像的水位测量技术进行测量。
2.2 偏移算法的应用
选择3个案例研究无人机漂移在每帧中引起的水位偏移。在无人机悬停稳定精度、操作人员控制和外界环境的影响下,无人机漂移轨迹有明显的随机性。3个案例的无人机偏移位移统计参数见表1,即平均偏移位移和最大偏移位移。2个偏移参数均随溢洪道溢流流量Q的增加而增加,在案例三中,最大偏移位移达到140.293 cm。
使用第1.3节中的方法校正每帧中随时间推移由无人机漂移引起的水位偏移。使用第1.4节中的方法计算获得每帧图像中的水位。为了验证测量技术的可靠性,将人工识别与无人机在偏移校正前计算的水位时间序列进行对比。结果表明,无人机得到的水位波动数据与无人机偏移校正前的人工识别数据有较大偏差,水位波动数据与无人机偏移校正后的人工识别水位数据吻合度较好。
2.3 测量技术应用
本文采用该测量技术测量了7个溢洪道泄洪案例中的跌水池水位。每种泄洪条件的统计水位(最大值、平均值和最小值)如图3所示。3个统计水位均与洪水流量有统计学意义。最高水位与最低水位的差距随着流量增加而增大,由于高速驱流与跌水池水体的相互作用更强,因此水位波动逐渐加剧。
图3绘制了3个统计水位和泄洪量的回归关系,并计算它们的回归方程,如公式(3)~公式(5)所示。
Zmax=0.002 3Q+1 307.9 " " " " (3)
Zave=0.001 7Q+1 307.5 " " " " "(4)
Zmin=0.001 4Q+1 307.2 " " " " "(5)
式中:Zmax为最大水位高程;Zave为平均水位高程;Zmin为最低水位高程;Q为溢洪道溢流流量。
本文视水流为近似均匀、稳定,曼宁方程和Chezy方程的经典Q-h关系方程可以说明Q与水深h之间的关系,如公式(6)所示。
(6)
式中:n为河流的曼宁系数;b为河流宽度;i为河流坡度;h为水深,Q与h之间的关系是非线性的。
如果考虑水位表面波动,就根据公式(3)计算溢洪道最大泄洪允许流量为6 200 m3/s;如果忽略水面波动,就根据公式(4)计算最大泄洪允许流量为8 625 m3/s。研究结果可为水电站汛期运行调度提供参考。
3 结论
针对目前现场水位测量仪器和方法的局限性,本文集无无人机摄影测量和图像识别技术,开发了一种新的测量技术来测量现场水位,构建了相应的测量系统。本文提出的无人机具有机动灵活、图像识别自动化程度高、精度高、非接触式、成本低以及对水质无要求等优点,适用于复杂野外环境(例如高陡山坡、宽阔河流)的水位和水面波动测量,更适用于短期水面波动和紧急水位变化过程测量。本文技术应用于某水电站溢洪道下游跌水池水位测量,结果表明,该技术可靠性很高。基于分析结果获取的水位可为水电站的运行调度提供参考,该技术还可应用于石油工业和冶金工业的水力模型试验和流体表面波动测量。
参考文献
[1]祝静.河道内水位变化对防洪工程岸坡稳定性的影响[J].黑龙江水利科技,2022,50(7):63-66.
[2]韩建军,蒋志兵,程丽华,等.信江梅港水文站水位流量变化特征研究[J].水利水电快报,2023,44(1):28-33,47.
[3]庞树森,陈荣波,彭付近,等.水利工程影响下的宜昌站枯水期水位流量分析[J].水电与新能源,2022,36(11):14-17.
[4]陈林.分布式基坑水位测量系统的研制[D].武汉:武汉工程大学,2022.
[5]刘建明.摄影测量与遥感技术在工程测量中的应用研究[J].工程建设与设计,2023(20):102-104.
[6]包善文.航空摄影与机载激光雷达集成技术在水利测量中的应用[J].测绘与空间地理信息,2023,46(增刊1):236-239.
[7]王小力.水利工程测量中无人机航空摄影测量技术运用分析[J].工程与建设,2022,36(2):314-315.
[8]王旭.无人机航测在山区水利测绘中的应用要点研究[J].科技创新导报,2020,17(16):62,64.
[9]卢自来,刘超群,朱运权.“水陆空”一体化测量在航道测量中的应用[J].中国水运(下半月),2023,23(3):59-62.
猜你喜欢
电子制作(2019年16期)2019-09-27 09:34:50
中国交通信息化(2019年4期)2019-07-13 05:51:34
电子制作(2018年19期)2018-11-14 02:37:04
电子制作(2018年14期)2018-08-21 01:38:16
人间(2016年26期)2016-11-03 17:52:40
中国科技博览(2016年22期)2016-11-01 18:10:31
科技视界(2016年22期)2016-10-18 14:30:27
旅游纵览(2014年8期)2014-09-10 07:22:44
焦点(2014年3期)2014-03-11 23:03:43
解放军生活(2009年10期)2009-11-16 09:19:20
