
基于TOF模组的智能猫盆猫砂余量精准检测设计
2024-12-06 00:00:00张伟
中国新技术新产品 2024年12期




摘 要:本文聚焦于智能猫砂盆猫砂余量测量的关键问题,引入时间飞行法(TOF)模组来优化测量方案。深入剖析了TOF模组的运作原理及其特性,并结合智能猫砂盆的实际应用场景,设计了一种高效且精准的猫砂余量测量方法。试验结果显示,该方法不仅具有极高的测量精度,而且误差率低、稳定性强。该方案为传统猫砂余量检测方法的不足提供了有效解决途径,对提升智能猫砂盆的用户体验和智能化水平具有重要意义。
关键词:TOF模组;智能猫砂盆;猫砂余量测量;精准检测;传感器技术;智能化
中图分类号:TP 18" " 文献标志码:A
随着宠物猫广泛流行,越来越多的人开始享受养猫的乐趣。然而,随着养猫人数增加,猫的护理问题也变得越来越突出,特别是在猫的排泄习惯方面。猫的自然习性决定了它们对排泄有特定要求,如果粪便不及时、有效地清理,它们可能会不愿意继续使用同一个猫砂盆,甚至可能寻找其他排泄的地方。此外,猫粪的强烈气味也给宠物主人带来了不小的挑战,特别是在保持家中清洁和无异味方面。为了解决这些迫切问题,人们亟需一种先进、智能的自动猫砂盆系统。这个系统不仅需要能迅速、高效地清理猫的粪便,还需要具备监控和远程控制功能,为宠物主人提供便利和安心。此外,这个系统还需要能自动检测猫砂的级别,使宠物主人能够确定何时需要更换猫砂,并深入了解猫的排泄习惯。鉴于目前猫砂盆的局限性,本文设计了一个集实时监控、智能提醒、数据分析和优化于一体的智能猫砂盆和猫砂余量检测系统。该系统利用先进技术,旨在为宠物主人提供一个全面解决排泄问题的方案,使他们在养猫的过程中更轻松,同时确保猫的舒适和卫生。
1 TOF模组的工作原理与技术特点
时间飞行法(TOF)模组是一种先进的测距传感器,其工作原理是基于光信号的往返时间来计算距离。具体来说,TOF模组通过发射器发射调制光信号,经物体反射后由接收器接收。通过测量光信号的往返时间并结合光速恒定原理,可以计算出目标物体与模组间的距离[1]。与传统的测距方法相比,TOF模组具有精度高、测量范围大和抗干扰能力强等优点。
2 TOF模组在智能猫砂盆猫砂余量测量中的设计
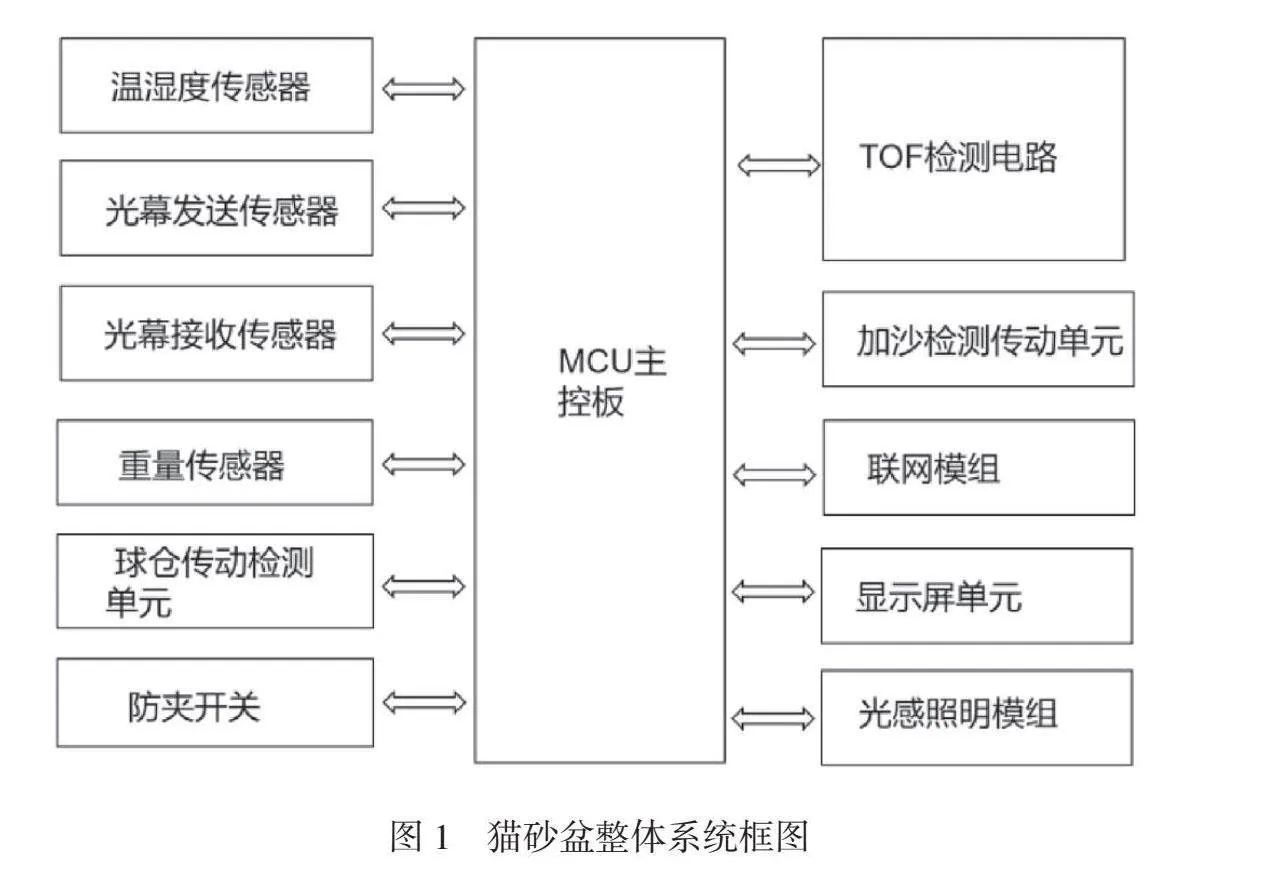
2.1 智能猫砂盆整体系统图
猫砂盆整体系统框图如图1所示,TOF检测电路在整个智能猫砂盆系统中具有重要的作用,它和MCU主板通过总线连接,将检测到的猫砂余量等信息实时传输给MCU主板。MCU主板收到相关信息后,判断猫砂是否低于标准阈值,如果是就驱动加沙检测传动单元动作,从而为砂仓内自动补充猫砂,同时将砂仓余粮的信息和已自动加沙的信息通过联网模组通知用户,以方便用户准确知道猫砂盆运行状态。
2.2 TOF器件选型和安装位置设计
在硬件选型方面,需要选择具有合适测量范围和精度的TOF模组。测量范围应足够覆盖猫砂的高度变化,精度决定了余量测量的准确度。此外,考虑智能猫砂盆的尺寸和结构,TOF模组的尺寸应尽可能小,以便于安装和固定。
对于安装位置的设计,需要全面、细致地考虑以下因素,以确保TOF模组能够准确、稳定地测量猫砂余量,同时便于日常维护和清洁。
首先,对于猫砂的流动特性,需要深入了解猫砂的堆积密度、颗粒大小以及在使用过程中可能出现的流动模式。猫砂堆积时可能会形成不同的坡度,而被挖出时,其流动方向和速度也会有所变化。因此,TOF模组的安装位置应在猫砂堆积相对稳定、流动特性较一致的区域,例如猫砂盆的一侧或中心位置。这样,无论猫砂处于何种状态,TOF模组都能捕捉到准确的测量数据。
其次,对于TOF模组的视角和盲区问题,需要根据猫砂盆的具体尺寸和形状来设计安装位置[2]。TOF模组的视角范围通常有限且存在一定的盲区[3],为了避免盲区对测量造成影响,可以将TOF模组安装在猫砂盆的上方,以垂直向下的视角进行测量。同时,调整TOF模组的安装高度和角度,确保其视角能够完全覆盖猫砂盆内的猫砂区域,从而避免盲区问题的出现。
最后,考虑猫砂盆的维护和清洁需求,TOF模组的安装位置应便于操作。可以将TOF模组安装在猫砂盆的边缘或外部支架上,日常清理和更换猫砂时就可以轻松地移除或调整TOF模组位置,避免对其造成不必要的干扰或损坏。此外,为了确保TOF模组的稳定性和耐用性,还可以选择使用防水、防尘材质进行包装和保护。
综上所述,考虑结合智能猫砂盆实际运行工况,TOF传感器选用光微电子的N01传感器。它是一款超小尺寸的TOF传感器,内部集成了高精度的单点TOF芯片、符合人眼安全class1的VCSEL微型激光器、先进的微型透镜和控制运算单元。特点是测量范围广、测距精度高、抗阳光干扰、抗盖板脏污干扰且室内外均可使用。其测试距离为2cm~100cm,满足猫砂余量为空猫砂时距离TOF传感器40cm、满猫砂时距离传感器60cm的范围,同时N01测量精度的测量精度为2mm,满足精准测量余量高精度的标准。
2.3 硬件方案的设计
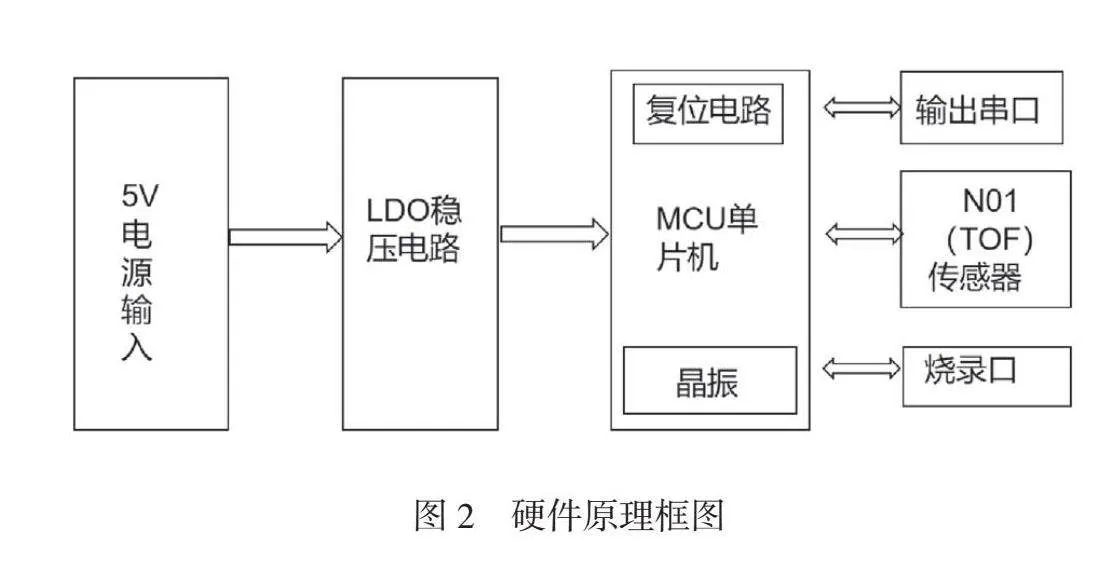
硬件原理框图如图2所示,TOF检测电路的设计主要由5V电源输入端口、LDO降压稳压电路、MCU单片机、输出串口以及TOF传感器构成。具体描述如下所示。1)5V电源输入端口。5V电源输入端口是TOF检测电路的能量来源,用于接收主板提供的稳定5V供电电压。该设计确保了电路的稳定性和可靠性,能为整个系统提供持续、稳定的电力支持。2)LDO降压稳压电路。LDO降压稳压电路采用了微盟电子的ME6221CM5G芯片,其主要作用是将输入的5V电源电压有效降压并稳压至3.3V。该设计不仅满足了单片机和TOF传感器对电源电压的特定需求,同时也确保了电源的稳定性和可靠性,避免了电压波动对电路性能造成的不利影响。3)MCU单片机。MCU单片机采用了STM32F030F4型号,是一款具有20脚的微型控制器,用于控制和处理TOF模组采集的数据,是整个电路的核心处理单元。此外,MCU单片机还需要与主板进行通信,将数据处理结果准确传递给主板,以实现信息的有效交互。4)输出串口。输出串口是MCU单片机与主板间信息交流的桥梁,可确保数据准确传输,使TOF检测电路能够将处理结果实时反馈给主板,从而实现整个系统的协同工作。5)TOF传感器。TOF传感器采用了光微科技的N01型号,用于采集目标物体的距离信息。通过精确测量和数据处理,TOF传感器为整个系统提供了可靠的数据支持。
综上所述,TOF检测电路的设计充分考虑了各个部分的特性和需求,通过电路设计和元件的合理选择,确保了电路的稳定性和可靠性。但在细节设计和具体实现过程方面,还需要进一步深入研究和优化,以提高电路的性能和效率。
该设计中包括电源、滤波、稳压、单片机控制和传感器读取等关键环节的布局和连接。这些局部设计的详细说明如下所示。
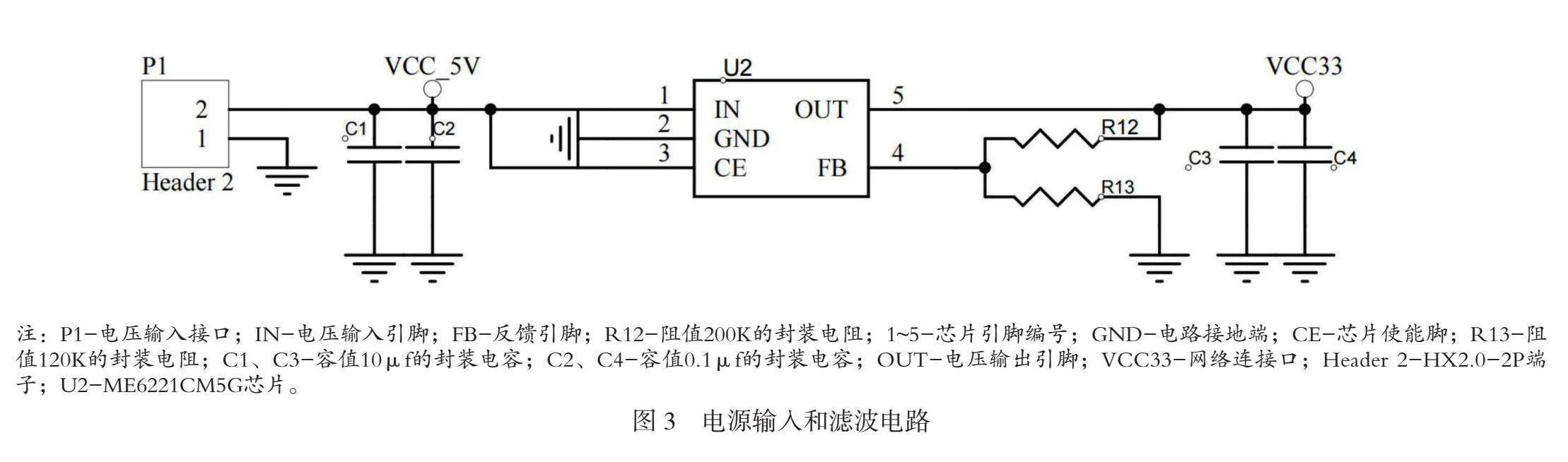
第一,电源输入与滤波。电源输入和滤波电路如图3所示,5V电源通过端子P1接入,这是整个电路的能量来源。为了确保电源的稳定性,本文采用C1和C2共2个滤波电容,其主要作用是滤除电源中的高频噪声和杂波,为后续电路提供一个更纯净的电源环境。该设计对保护电路中的敏感元件,尤其是单片机和传感器至关重要。
第二,DC稳压电路设计。如图3所示,经过滤波后的5V电源进入DC稳压芯片U2型号为ME6221CM5G,此芯片的主要功能是将输入的电压通过电阻R12、R13和电容C3、C4稳定地转换为3.3V并输出。这种设计不仅满足了单片机和传感器对特定电压的需求,同时也确保了输出电压的稳定性和可靠性。ME6221CM5G芯片具有出色的稳压性能和温度稳定性,能够在各种环境下为电路提供稳定的电源。
第三,单片机最小系统设计。STM32F030F4单片机最小系统
STM32F030F4单片机最小系统如图4所示。单片机U6(STM32F030F4)采用了最小系统设计[3],表明本文只使用了单片机所必需的基本元件,如外部晶振X1、复位电路电阻R17和电容C8,其中单片机PA4口直接串联电阻R21和LED4指示灯,PA13和PA14引脚直接与端子P2连接,作为烧录口,PA2、PA3口直接连接端子P3,作为和主板通信的串口电路。这种设计有助于降低电路的复杂性,提高系统的稳定性和可靠性。同时,外部晶振电路为单片机提供了精确的时钟信号,确保单片机能够正常工作。
第四,TOF传感器的通信设计。TOF传感器电路如图5所示,其中U1为TOF传感器芯片型号为N01,芯片的XSHUT中断引脚直接与对应的U6单片机XSHUT引脚相连。GPIO引脚直接与对应的单片机GPIO网络引脚相连。芯片的I2C接口I2C_SCL、I2C_SDA通过电阻R16、R18上拉后,直接与对应的单片机I2C_SCL、I2C_SDA引脚相连。I2C接口是一种双向串行通信协议,允许单片机与传感器间进行数据高效传输和控制。通过这种连接方式,单片机可以读取传感器U1测量的距离信息,并对其进行处理。单片机处理完U1传感器的数据后,需要将其通过串口传给上位机主板。串口通信是一种广泛应用的通信方式,具有传输速度快、稳定性好等优点。本设计采用了标准的串口通信协议,确保了数据的准确传输和系统的稳定运行。
在实际制作和调试过程中,还需要注意元件的选型、布局和焊接等细节问题,以确保电路的性能达到最佳状态。
2.4 软件方案的设计
在编程实现上,本文采用C语言作为编程语言,并将keil软件作为编程软件。keil软件具有强大的功能和易用性,能够满足本文对TOF检测电路软件的需求。编译后的hex文件通过JFLASH软件、J-LINK仿真器或USB离线下载器烧录进STM32F030单片机中[4],从而实现软件固化。
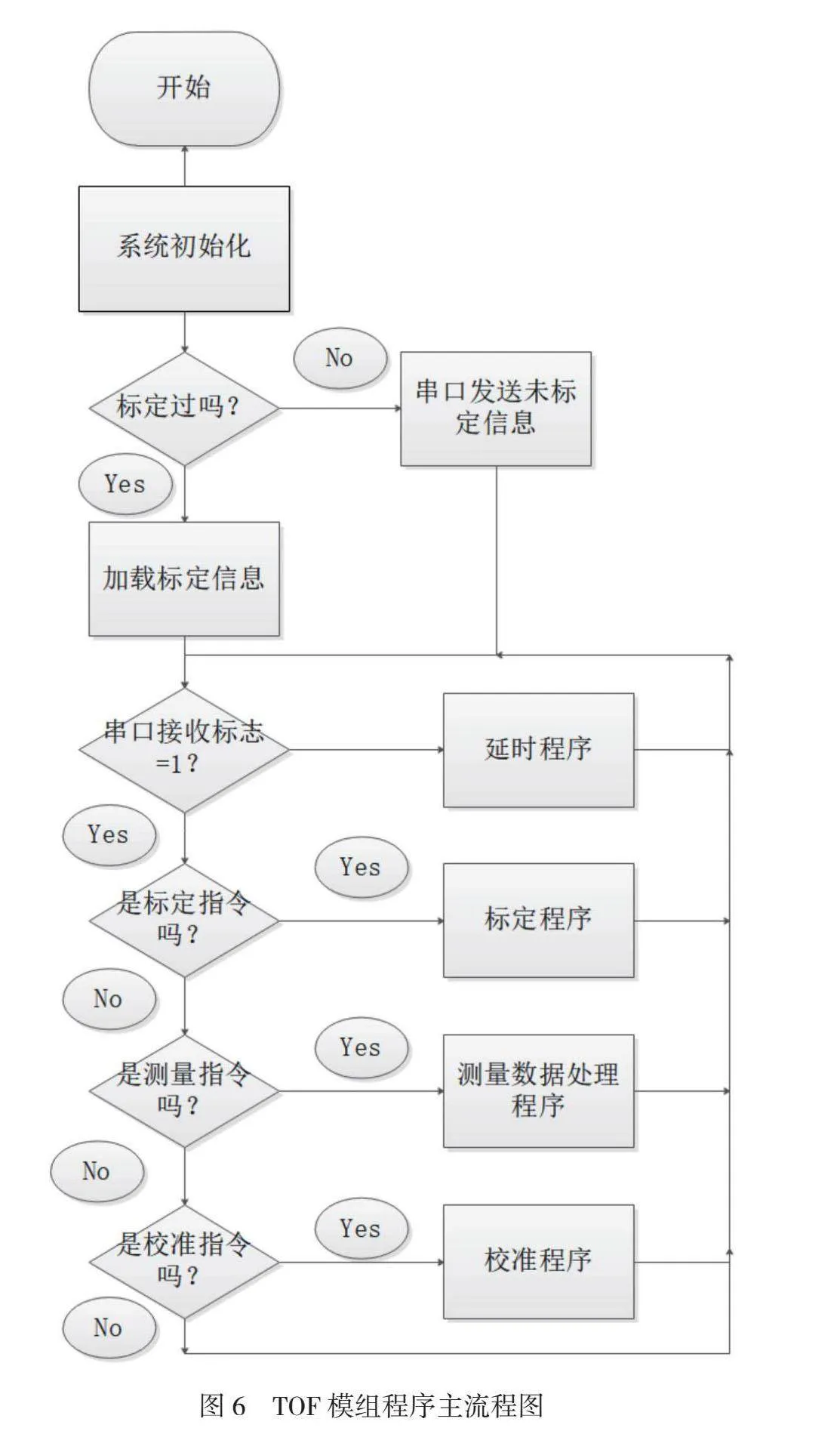
TOF检测电路的软件部分是整个系统的关键之一,主要由系统初始化程序、串口接收中断程序、标定程序、测量数据处理程序以及校准程序等多个模块组成。每个模块都具有相应作用,共同确保TOF检测电路稳定运行和精确测量。
TOF模组程序主流程图如图6所示。系统初始化程序是软件启动时的首要任务,用于配置单片机的各种寄存器、初始化串口通信参数以及设置其他必要的外围设备。这一过程至关重要,为后续的程序运行奠定了坚实基础。
标定程序是确保测量精度的关键步骤。通过测量标准物体,得出系统的误差范围并进行补偿。这一过程需要精确控制和计算,以确保标定结果的准确性。
测量数据处理程序是对接收的原始数据进行处理和分析,提取出有用的信息。这一过程包括滤波、平滑和拟合等操作,以消除噪声和干扰,提高测量结果的可靠性。
校准程序用于定期对系统进行校准,以确保其长期的稳定性和准确性。通过与实际测量结果进行比较,程序可以自动调整系统参数,使其始终保持在最佳状态。
2.5 测量数据处理
需要对TOF模组获取的原始数据进行数据处理,以提取出准确的猫砂高度信息,并根据高度信息得到猫砂的余量。检测猫砂余量测量示意图如图7所示,该过程涉及关键环节如下。
2.5.1 数据预处理
进行数据预处理时,本文对TOF模组获取的原始距离数据进行了多次测量,以确保数据的稳定性和可靠性。具体步骤如下所示。1)多次测量。为了获得更准确的数据,本文对同一目标进行了多次测量。例如,设定每次测量间隔为1s,共进行30次测量,以获取一个包括30个数据点的数据集。这样做的好处是可以减少单次测量带来的偶然误差。2)滤除最大值和最小值。获得多次测量的数据集后,本文观察到数据中可能存在一些异常值,这些异常值可能是由环境噪声、设备干扰或其他不可预知的因素导致的。为了消除这些异常值的影响,本文采用滤除最大值和最小值的方法。即去除数据集中的最大和最小数据点,只保留剩余的中间值。这样做可有效降低噪声和干扰对数据的影响。3)求平均值。滤除最大值和最小值后,可得一组更稳定的数据。为了进一步提高数据的准确性和可靠性,本文采用求平均值的方法来处理这组数据。通过将剩余数据点的值相加并除以数据点的数量,可以得到一个平均值,并将其作为最终处理结果。平均值可有效消除数据中的随机误差和波动,提高信号测量质量。
2.5.2 高度数据提取
2.5.2.1 传感器位置空仓距离L0
将距离传感器设置在球形仓底部最低点的正上方,使距离传感器发射的光线垂直射入球形仓底部的最低点,这样的设置可使该距离传感器测得的距离即为垂直距离,方便后期的公式计算,节省时间,无须再进行垂直距离转换,便于距离传感器的安装与固定。当球形仓为空仓时,即当盛放猫砂的球形仓为空,不盛放任何猫砂时,在球形仓的上方利用距离传感器测得球形仓底部最低点的距离。
2.5.2.2 获取初始猫砂的距离L1
根据球形仓的规格,在球形仓内放置相应量的初始猫砂,并将其铺平。铺平的初始猫砂形成一个初始平面,而TOF传感器即检测这个平面内的初始猫砂到距离传感器的距离,通过读取测量值得出球形仓中初始猫砂的距离。
2.5.2.3 获取剩余猫砂的距离L2
随着猫砂不断减少,剩余猫砂在球形仓内呈铺平状态,形成一个剩余平面。无论是初始猫砂还是剩余猫砂,铺平状态可以通过人工实现,也可以通过猫砂盆铺平实现。TOF传感器检测这个平面内的剩余猫砂到距离传感器的距离,得出球形仓中剩余猫砂的实时距离。
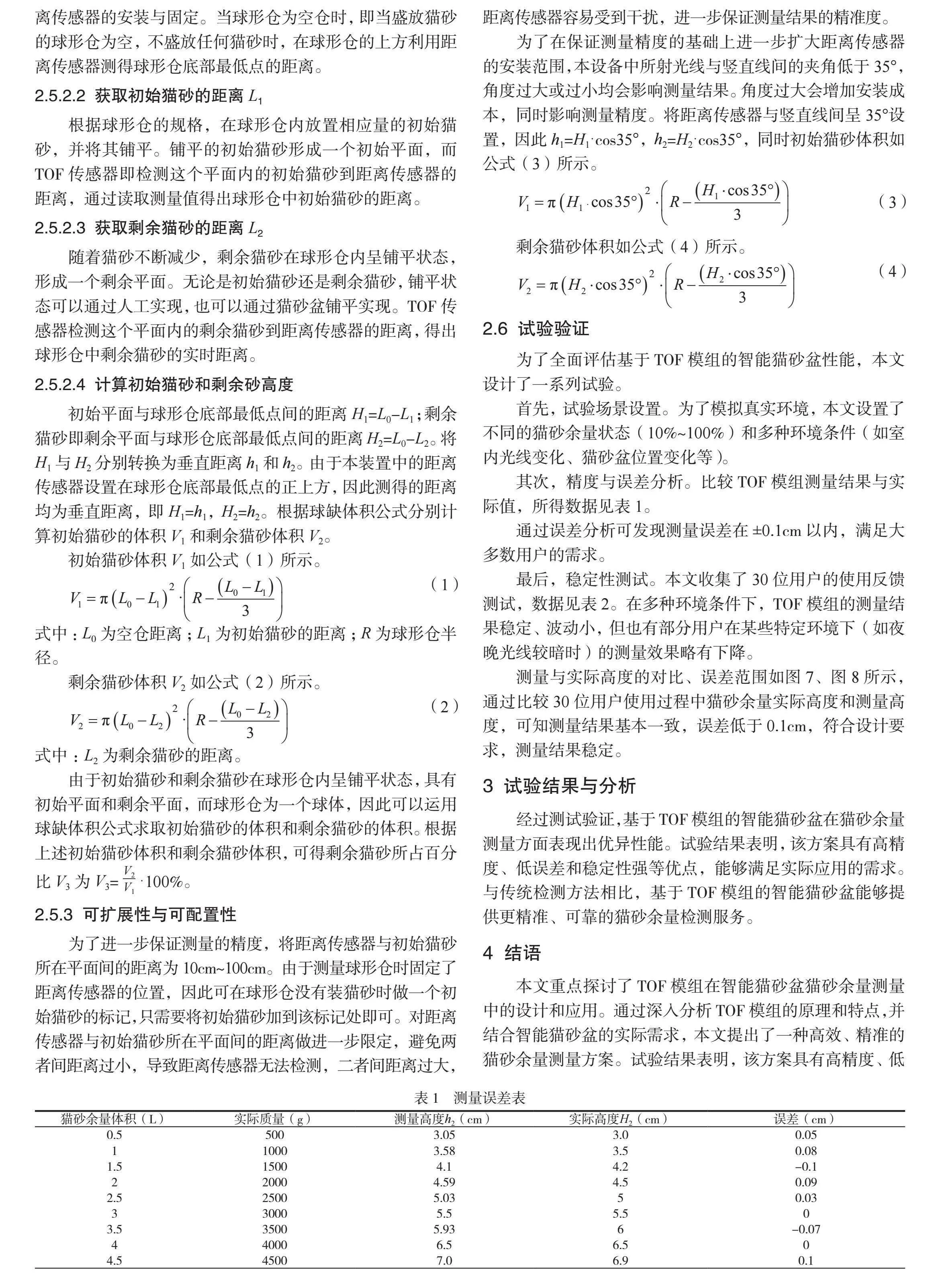
2.5.2.4 计算初始猫砂和剩余砂高度
初始平面与球形仓底部最低点间的距离H1=L0-L1;剩余猫砂即剩余平面与球形仓底部最低点间的距离H2=L0-L2。将H1与H2分别转换为垂直距离h1和h2。由于本装置中的距离传感器设置在球形仓底部最低点的正上方,因此测得的距离均为垂直距离,即H1=h1,H2=h2。根据球缺体积公式分别计算初始猫砂的体积V1和剩余猫砂体积V2。
初始猫砂体积V1如公式(1)所示。
(1)
式中:L0为空仓距离;L1为初始猫砂的距离;R为球形仓半径。
剩余猫砂体积V2如公式(2)所示。
(2)
式中:L2为剩余猫砂的距离。
由于初始猫砂和剩余猫砂在球形仓内呈铺平状态,具有初始平面和剩余平面,而球形仓为一个球体,因此可以运用球缺体积公式求取初始猫砂的体积和剩余猫砂的体积。根据上述初始猫砂体积和剩余猫砂体积,可得剩余猫砂所占百分比V3为V3=·100%。
2.5.3 可扩展性与可配置性
为了进一步保证测量的精度,将距离传感器与初始猫砂所在平面间的距离为10cm~100cm。由于测量球形仓时固定了距离传感器的位置,因此可在球形仓没有装猫砂时做一个初始猫砂的标记,只需要将初始猫砂加到该标记处即可。对距离传感器与初始猫砂所在平面间的距离做进一步限定,避免两者间距离过小,导致距离传感器无法检测,二者间距离过大,距离传感器容易受到干扰,进一步保证测量结果的精准度。
为了在保证测量精度的基础上进一步扩大距离传感器的安装范围,本设备中所射光线与竖直线间的夹角低于35°,角度过大或过小均会影响测量结果。角度过大会增加安装成本,同时影响测量精度。将距离传感器与竖直线间呈35°设置,因此h1=H1·cos35°,h2=H2·cos35°,同时初始猫砂体积如公式(3)所示。
(3)
剩余猫砂体积如公式(4)所示。
(4)
2.6 试验验证
为了全面评估基于TOF模组的智能猫砂盆性能,本文设计了一系列试验。
首先,试验场景设置。为了模拟真实环境,本文设置了不同的猫砂余量状态(10%~100%)和多种环境条件(如室内光线变化、猫砂盆位置变化等)。
其次,精度与误差分析。比较TOF模组测量结果与实际值,所得数据见表1。
通过误差分析可发现测量误差在±0.1cm以内,满足大多数用户的需求。
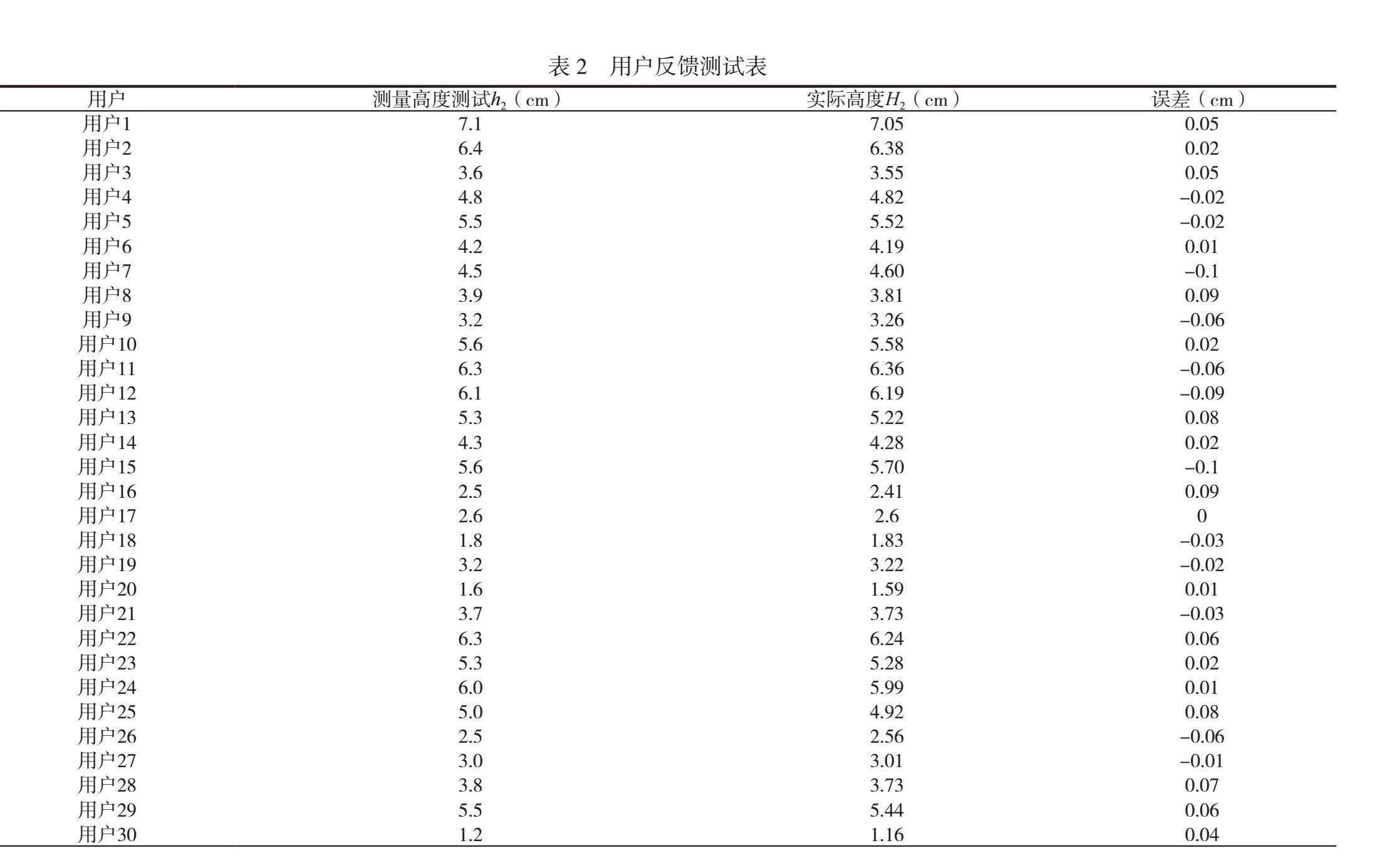
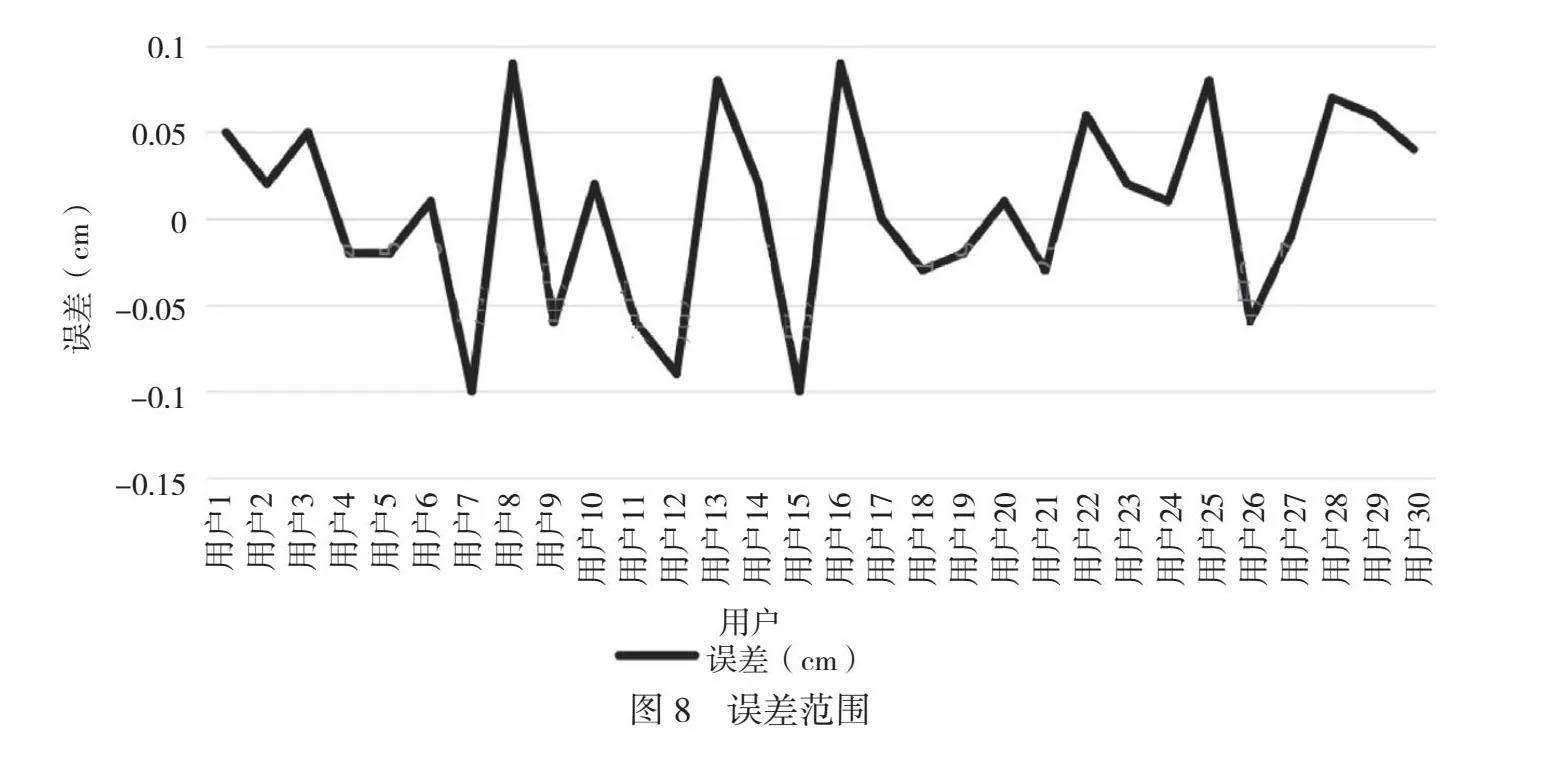
最后,稳定性测试。本文收集了30位用户的使用反馈测试,数据见表2。在多种环境条件下,TOF模组的测量结果稳定、波动小,但也有部分用户在某些特定环境下(如夜晚光线较暗时)的测量效果略有下降。
测量与实际高度的对比、误差范围如图7、图8所示,通过比较30位用户使用过程中猫砂余量实际高度和测量高度,可知测量结果基本一致,误差低于0.1cm,符合设计要求,测量结果稳定。
3 试验结果与分析
经过测试验证,基于TOF模组的智能猫砂盆在猫砂余量测量方面表现出优异性能。试验结果表明,该方案具有高精度、低误差和稳定性强等优点,能够满足实际应用的需求。与传统检测方法相比,基于TOF模组的智能猫砂盆能够提供更精准、可靠的猫砂余量检测服务。
4 结语
本文重点探讨了TOF模组在智能猫砂盆猫砂余量测量中的设计和应用。通过深入分析TOF模组的原理和特点,并结合智能猫砂盆的实际需求,本文提出了一种高效、精准的猫砂余量测量方案。试验结果表明,该方案具有高精度、低误差和稳定性强等优点,为解决传统猫砂余量检测方法的问题提供了有效途径。未来将继续优化和完善基于TOF模组的智能猫砂盆设计,提高其自动化程度和用户体验,同时也将关注该技术在其他智能家居设备中的应用前景,以期拓展其应用范围和领域。
参考文献
[1]张涛.TOF传感器技术及应用[M].北京:电子工业出版社,2021.
[2]刘阳.3DTOF传感器技术[M].北京:国防工业出版社,2022.
[3]陈忠平.STM32F030微控制器原理与实践[M].北京:电子工业出版社,2020.
[4]刘军.STM32F030单片机应用开发实战指南[M].北京:北京航空航天大学出版社,2022.
猜你喜欢
军事文摘(2022年19期)2022-10-18 02:41:14
建材发展导向(2021年10期)2021-07-16 07:13:24
印刷工业(2020年4期)2020-10-27 02:46:02
印刷工业(2020年4期)2020-10-27 02:45:52
中国交通信息化(2017年4期)2017-06-06 07:21:52
卷宗(2016年10期)2017-01-21 14:54:01
中国新技术新产品(2017年2期)2017-01-20 17:29:54
考试周刊(2016年78期)2016-10-12 12:42:34
求知导刊(2016年15期)2016-08-15 22:05:29
考试周刊(2016年47期)2016-06-29 09:23:59
