
安防反恐用多监控手段集控动态目标跟踪控制方法
2024-12-06 00:00:00刘德强刘勇渠立臣
中国新技术新产品 2024年12期

摘 要:为解决现有跟踪控制方法中目标偏离图像中心、方位角误差大的问题,本研究提出一种集控动态目标跟踪方法。通过整合不同监控设备和传感器信息,并进行信息预处理和特征提取,来融合有效信息。利用反向投影消除静态背景,更新分类器以追踪目标状态变化。试验结果显示,当目标偏离中心时,相机角度值水平角在58°~95°,垂直角在60°~93°,符合预期;当200s时,方位角误差趋近0。这种集控方法提高了安防反恐监控的感知能力,实现了良好的跟踪控制效果。
关键词:安防反恐;监控;目标跟踪
中图分类号:TP 27" " 文献志码:A
在当今社会,安防反恐工作面临着前所未有的挑战。随着科技的不断进步,恐怖活动和犯罪手段也日趋复杂和多样化。传统的监控手段已经难以满足现代安防的需求,因此,亟需探索和应用新的技术来提高安防反恐的效率和准确性。在这样的背景下,多监控手段集控动态目标跟踪控制方法应运而生。通过动态目标跟踪控制方法,系统能够自适应地调整跟踪策略,保证目标在复杂多变的场景中始终受到有效监控[1]。引入目标跟踪控制方法,不仅提高了安防反恐的智能化水平,也极大地提高了监控的效率和准确性[2],它能够在第一时间发现潜在的安全隐患,为决策者提供准确的信息支持,从而做出快速而精准的反应。这对保障人民生命财产安全、维护社会稳定具有重要意义。由于传统方法缺乏智能分析能力,因此无法对目标进行实时跟踪等。当专注于目标细节时,可能会忽略周围的其他移动目标,导致无法全面掌握监控区域内的所有情况。在需要快速抓取目标细节过程中,具有较强的局限性,从而使结果无法达到预期。因此,现阶段以安防反恐用多监控手段集控动态目标为研究对象,对目标进行跟踪控制,结合实际情况对其进行试验。
1 动态目标跟踪控制
1.1 多监控手段集控信息融合
多监控手段集控信息是安防反恐领域中的一个重要环节,对不同监控设备和传感器的信息进行有效整合,以提高监控过程的整体效能[3]。对各种信息源提供的数据和特征进行综合处理,对监控设备采集的信息进行预处理,对原始数据进行线性变换,使其能够标准化。其计算过程如公式(1)所示。
z=f([i-]d) " (1)
式中:i为初始数据点;为数据均值;d为标准差。对原始数据进行预处理,使其质量更高。
在数据处理的过程中,关键步骤是将不同来源的数据进行关联和对齐。这是建立数据间时空关系的基础,有助于更全面地理解数据的本质和内在规律。数据关联和对齐后,可保证数据之间的准确性和一致性,从而进行特征提取,获得数据中最具代表性的部分。在特征提取的过程中,需要充分考虑不同网络之间的差异以及监控影像中动态目标的特点,保证提取的特征具有足够的代表性和准确性。当提取监控信息特征时,选择合适的网络深度至关重要。网络过深会导致信息过度抽象和丢失,而网络过浅则无法充分提取数据的内在特征[4]。因此,需要根据具体的应用场景和数据特点,选择合适的网络深度,以保证能从同一图像中提取互补特征。
虽然通过特征提取可以获得很多有用的信息,但在采样提取特征的过程中,会不可避免地丢失部分细节信息。为了解决这个问题,采用编码器和解码器间,多个跳跃的连接方式。这种连接方式能够将网络提取的浅层和深层特征进行融合,从而有效地补全丢失的信息,提高特征提取的准确性和完整性。
因此,在网络编码器和解码器中添加了残差模块的UNet,获取多尺度上下聚合信息,设定网络融合后的模型为e,获取每个深度网络对像素x的输出概率p(k|x,ej)。将像素x识别为k类的概率,并设定背景为k2,目标为k1。
在数据处理实践中,采用深度网络融合的方式,将单张影像的多个通道的特征图进行堆叠,以此构建一个更丰富和全面的数据集。这种方法能够充分利用影像中的多通道信息,将不同通道的特征图进行有机融合,从而提高数据的质量和价值。通过这种方式,有效地处理不同监控设备之间的信息冗余问题。不同监控设备由于其自身的技术特性和工作环境的差异,因此会产生一定的信息冗余或缺失。通过深度网络融合,可以将这些信息进行有效整合和互补,从而得到一个更准确和完整的数据集。最终,这个数据集在经过训练后,能够为目标精确跟踪识别提供有力的数据支撑。
1.2 多特征融合法背景消除
多特征融合法背景消除是一种有效的图像处理方法,可以帮助提取目标并消除背景干扰。在实际应用中,这种方法广泛应用于视频监控、智能交通、安防反恐等领域,用来实时跟踪和识别动态目标。首先,该方法利用差分灰度直方图作为判断目标运动状态的依据[5]。差分灰度直方图可以反映图像中像素值之间的变化情况,从而准确判断目标是否处于运动状态。对连续帧图像进行差分处理,可以得到一个表示图像变化的差分图。其次,使用融合后的图像作为目标,并找出与目标梯度特征相似的候选目标区域,可以通过比较目标区域与周围图像像素的梯度值来实现。梯度是指像素值的变化率,可以描述图像的边缘和纹理信息。通过计算候选目标区域的梯度特征,可以筛选与目标特征相近的区域。再次,针对选定的图像中的动态目标,对原图的梯度直方图进行反向投影,从而消除其中的静态背景。反向投影是一种将图像中像素值映射回原始图像的过程。通过将目标的梯度特征映射到原图上,可以高亮显示与目标相关的像素点,从而将静态背景消除,突出目标的轮廓[6]。在运动目标检测中,通过计算当前帧图像和背景图像之间的差值来获得运动目标所在的区域。差值图像可以准确地反映目标与背景之间的差异。通过设置适当的阈值,可以将差值图像二值化,将运动目标所在的区域提取出来。对差分图进行数字图像处理,例如连通区域分析,可以得到目标的梯度特征。连通区域分析是指将图像中相邻的像素进行分组,形成表示目标区域的连通区域。通过计算连通区域的各项特征,例如面积、周长、中心点位置等,可以获取更详细的目标信息。最后,将不同特征进行融合,可以得到更全面准确的目标特征信息。
梯度特征融合的计算过程如公式(2)所示。
q(i0)=λq(i0)+(1-λ)q(o0) " (2)
式中:λ为色度值。通过梯度特征融合,能够获得直方图的反向投影,从而避免了因单一特征相似而导致的目标图像与背景图像区分问题。通过三帧差来获取动态目标,消除目标运行对背景产生的影响,获得更精确的动态目标轮廓,其消除过程如公式(3)所示。
(3)
式中:bi为第i个帧。因此,运用帧间差分来检测视频图像序列中相邻帧之间的变化。在时间t的一个帧f(i,o,t)和下一个时刻f(i,o,t+1)间,通过计算帧间差分得到一个二值图。设定决策阈值为Y,若帧间差分值小于Y,则视为背景图的一部分。对该部分进行消除,这样就完成了背景消除,获得了目标所在区域。
1.3 主动跟踪控制动态目标
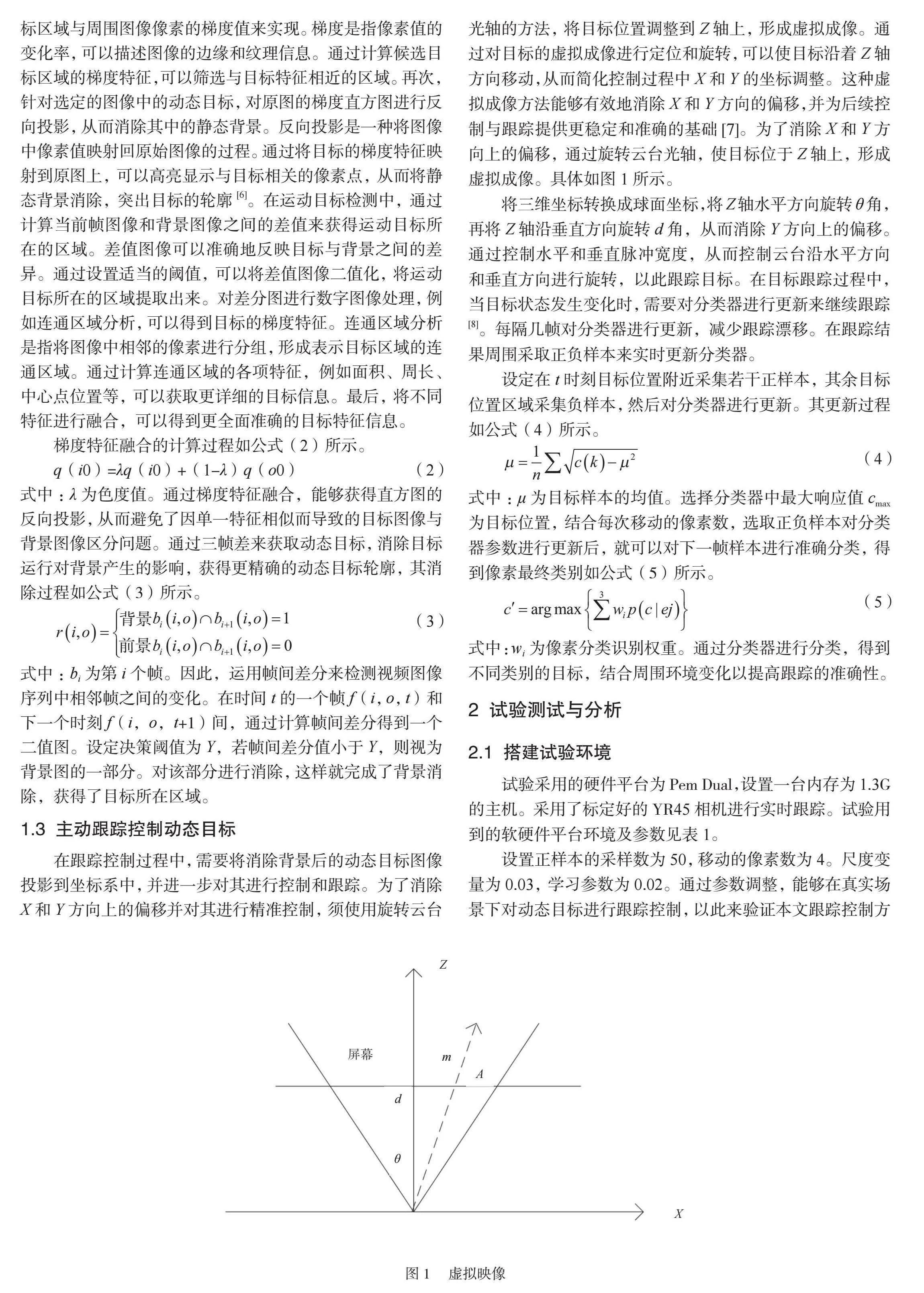
在跟踪控制过程中,需要将消除背景后的动态目标图像投影到坐标系中,并进一步对其进行控制和跟踪。为了消除X和Y方向上的偏移并对其进行精准控制,须使用旋转云台光轴的方法,将目标位置调整到Z轴上,形成虚拟成像。通过对目标的虚拟成像进行定位和旋转,可以使目标沿着Z轴方向移动,从而简化控制过程中X和Y的坐标调整。这种虚拟成像方法能够有效地消除X和Y方向的偏移,并为后续控制与跟踪提供更稳定和准确的基础[7]。为了消除X和Y方向上的偏移,通过旋转云台光轴,使目标位于Z轴上,形成虚拟成像。具体如图1所示。
将三维坐标转换成球面坐标,将Z轴水平方向旋转θ角,再将Z轴沿垂直方向旋转d角,从而消除Y方向上的偏移。通过控制水平和垂直脉冲宽度,从而控制云台沿水平方向和垂直方向进行旋转,以此跟踪目标。在目标跟踪过程中,当目标状态发生变化时,需要对分类器进行更新来继续跟踪[8]。每隔几帧对分类器进行更新,减少跟踪漂移。在跟踪结果周围采取正负样本来实时更新分类器。
设定在 t时刻目标位置附近采集若干正样本,其余目标位置区域采集负样本,然后对分类器进行更新。其更新过程如公式(4)所示。
(4)
式中:μ为目标样本的均值。选择分类器中最大响应值cmax为目标位置,结合每次移动的像素数,选取正负样本对分类器参数进行更新后,就可以对下一帧样本进行准确分类,得到像素最终类别如公式(5)所示。
(5)
式中:wi为像素分类识别权重。通过分类器进行分类,得到不同类别的目标,结合周围环境变化以提高跟踪的准确性。
2 试验测试与分析
2.1 搭建试验环境
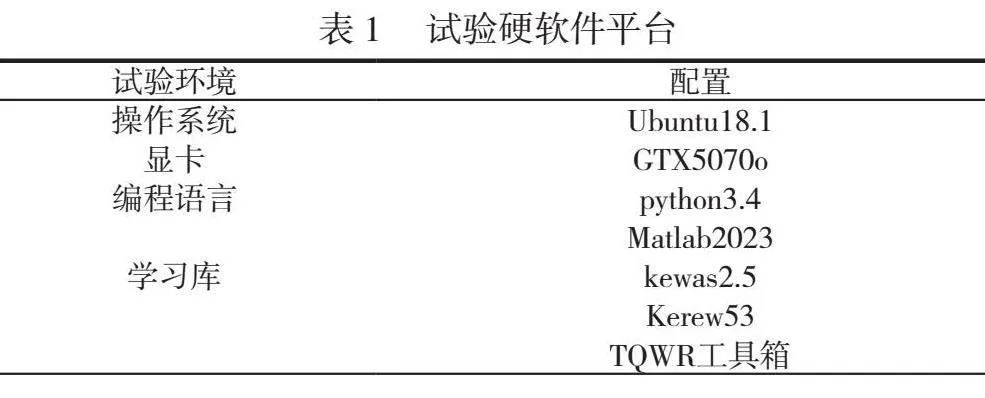
试验采用的硬件平台为Pem Dual,设置一台内存为1.3G的主机。采用了标定好的YR45相机进行实时跟踪。试验用到的软硬件平台环境及参数见表1。
设置正样本的采样数为50,移动的像素数为4。尺度变量为0.03,学习参数为0.02。通过参数调整,能够在真实场景下对动态目标进行跟踪控制,以此来验证本文跟踪控制方法的效果。针对这个问题,通过目标发生偏离时,YR45相机需要转动的角度值来分析试验结果。根据这些角度值,当设定水平角为50°~105°,垂直角为60°~95°时,能够对目标进行有效主动跟踪。
2.2 结果与分析
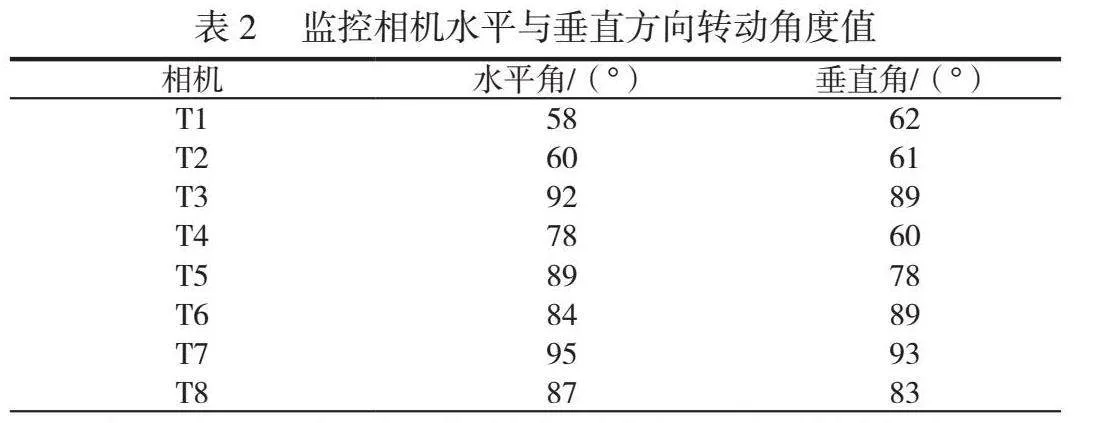
为了验证本文方法的有效性,试验选用标定好的YR45相机,在真实场景下对行人进行跟踪。在相同的场景下,对不同动态目标进行跟踪。通过控制摄像机得到目标在监控视野中的位置,确定目标在相机监控视野的中心位置,获得水平与垂直方向旋转角度值见表2。
在跟踪过程中,当目标偏离图像中心时,计算得出T1至T8的相机角度值水平角均在58°~95°,垂直角均在60°~93°,结果符合预期。说明运用本文跟踪控制方法能使摄像机准确地调整角度与位置,使目标重新回到图像中心,主动跟踪运动目标。通过有效地控制相机,可以避免运动目标发生漂移或丢失等情况。当动态目标一直保持在摄像机监控范围内时,能够为安防反恐领域提供一种更有效的技术手段,提高了监控的效率。
同时,为了验证本文方法的适用性,在相同的仿真设置条件下进行动态目标跟踪半实物仿真试验。在半实物仿真试验中,动态目标的状态信息更新频率为12.3Hz。为避免目标信息反馈迟滞导致的后果,须对目标状态信息进行滤波处理,以提高状态信息的准确性。设置3个小组,根据不同时间内的目标动态变化情况,对角距离误差进行计算,预期当200s时,误差趋近0的情况下,能够得到较优跟踪效果。3个小组的的具体变化情况如图2所示。
由图2可知,在跟踪控制情况下,对动态目标进行协同跟踪控制,当200s时,3个小组的方位角误差值均趋近0,结果符合预期。说明运用本文跟踪控制方法能够显著提高跟踪性能,优化控制所用时间,能够在相同任务下,保持一定的跟踪控制效果,提升跟踪效率。利用本文跟踪控制方法能够在跟踪过程中获得大量信息,增加对安防反恐用多监控手段集控过程中的感知能力,使在复杂环境下的监控跟踪更具实际意义。
综上所述,本文目标跟踪控制方法在目标跟踪性能方面优势很明显,这个方法能够更准确地预测和跟踪目标的运动轨迹,在相同条件下,具有较高的跟踪精度。在应对复杂场景和动态环境方面,本文方法都能够有效应对,并保持较高的跟踪性能,能够根据实时环境信息进行实时调整和优化,计算效率更高,跟踪控制效果较好。
3 结语
本文从目标跟踪控制入手,结合安防反恐用多监控手段集控方法,探究了安防反恐用多监控手段集控动态目标跟踪控制方法。但这个方法中还存在一些不足,例如数据的安全与隐私问题、损失函数的验证问题、误判问题等。动态目标跟踪控制方法使监控系统能够自适应地调整跟踪策略,保证目标在复杂多变的场景中始终受到有效监控。这不仅有助于及时发现潜在的安全隐患,还能为决策者提供准确的信息支持。后续,需要加强技术研发与合作,通过不断优化和完善多监控手段集控动态目标跟踪控制方法,共同推动安防反恐事业迈向新的高度。
参考文献
[1]史扬杰,程馨慧,奚小波,等.农业机械导航路径跟踪控制方法研究进展[J].农业工程学报,2023,39(15):1-14.
[2]李奇,刘强,王天宏,等.基于EKF在线辨识的多堆燃料电池系统最大效率点跟踪控制方法[J].中国电机工程学报,2022,42(2):673-684.
[3]刘乐,高杰,刘鹏,等.基于滑模观测器的交流异步电机预设性能位置跟踪控制[J].中国电机工程学报,2022,42(9):3432-3443.
[4]朱志远,朱紫辉,周晓勤,等.三轴电磁-压电混合驱动快速刀具伺服的轨迹跟踪控制[J].光学精密工程,2023,31(15):2236-2247.
[5]迟瑞娟,熊泽鑫,姜龙腾,等.基于模型预测的插秧机路径跟踪控制算法[J].农业机械学报,2022,53(11):22-30,99.
[6]李新凯,虎晓诚,马萍,等.基于改进DDPG的无人驾驶避障跟踪控制[J].华南理工大学学报(自然科学版),2023,51(11):44-55.
[7]刘博,孟中杰.软管连接约束下的加油机/无人机编队跟踪控制[J].航空学报,2023,44(17):263-273.
[8]张康,王丽梅.考虑同步误差影响的直驱H型平台轮廓跟踪控制方法[J].电工技术学报,2022,37(8):1982-1990.
猜你喜欢
疯狂英语·新读写(2021年10期)2021-12-07 02:41:30
新世纪智能(英语备考)(2019年4期)2019-06-26 00:49:04
铁道通信信号(2019年11期)2019-05-21 03:06:06
中国公共安全(2017年8期)2017-10-13 08:12:18
中国公共安全(2017年8期)2017-10-13 08:12:17
科技创新与应用(2016年36期)2017-02-21 18:48:01
电脑知识与技术(2016年27期)2016-12-15 19:37:37
航空兵器(2016年5期)2016-12-10 17:12:24
科技视界(2016年5期)2016-02-22 12:25:31
哈尔滨理工大学学报(2015年5期)2016-01-19 18:06:12
