
抑制抖振的PMSM无位置传感器控制算法优化
2024-11-02 00:00:00罗帅张良力徐万万龚若涵吴美琴
现代电子技术 2024年21期
关键词:永磁同步电机

摘 "要: 在分析无位置传感器控制永磁同步电机(PMSM)发生高频抖振原因的基础上,文中提出对PMSM滑模观测器算法及起动控制进行优化,包括:使用双曲正切函数代替符号函数作为滑模面切换函数,基于李雅普诺夫理论的滑模增益整定,使用锁相环法代替反正切法估计转子位置等。针对PMSM全速域无位置传感器运行时电机低速起动位置估计困难的问题,提出恒电流频比([IF])控制。考虑零速起动的PMSM由[IF]控制转向滑模观测器控制切换时产生的电磁转矩不平稳,引入避免滑模观测器给定观测位置角差值发生波动的[q]轴电流系数,并制定转子电流控制新策略。仿真实验结果证明该方法相比传统方法能有效降低转速波动且转子位置角估算误差更小,验证了所提优化方法在抑制抖振方面的有效性。该算法可应用于智能制造领域,以有效抑制系统抖振问题,进而提升智能制造企业生产效益。
关键词: 永磁同步电机; 无位置传感器控制; 滑模观测器; 抖振抑制; 恒电流频比; 全速域
中图分类号: TN609⁃34 " " " " " " " " " " " " "文献标识码: A " " " " nbsp; " " " " " " " 文章编号: 1004⁃373X(2024)21⁃0125⁃06
Optimization of position sensorless control algorithm for PMSM to suppress chattering
LUO Shuai1, 2, ZHANG Liangli1, 2, XU Wanwan1, 2, GONG Ruohan1, 2, WU Meiqin1, 2
(1. School of Information Science and Engineering, Wuhan University of Science and Technology, Wuhan 430081, China;
2. Engineering Research Center for Metallurgical Automation and Measurement Technology of Ministry of Education,
Wuhan University of Science and Technology, Wuhan 430081, China)
Abstract: An optimization of the sliding mode observer algorithm and starting control of PMSM (permanent magnet synchronous motor) are proposed based on the cause analysis of the high⁃frequency chattering of the PMSM with position sensorless control. The optimization includes the following three aspects. The hyperbolic tangent function is used to replace the sign function and is taken as the sliding surface switching function. The sliding mode gain setting is performed based on the Lyapunov theory. The phase⁃locked loop method is used to replace the arc tangent method for the estimation of motor rotor position. In view of the fact that it is difficult to estimate the position of motor starting at low speed when PMSM is running with position sensorless in full speed domain, the constant current intensity⁃frequency ([IF]) ratio control is proposed. Considering that the electromagnetic torque of PMSM with zero⁃speed starting is unstable when it is switched from [IF] control to sliding mode observer control, a [q]⁃axis current coefficient is introduced to avoid the fluctuation of the angle difference between the given and observed position of sliding mode observer, and a new rotor current control strategy is designed. The simulation results show that the proposed method can reduce the speed fluctuation effectively and the estimation error of rotor position angle is smaller than that of the traditional method, so the effectiveness of the proposed optimization method in suppressing chattering is verified. The algorithm can be applied to the field of intelligent manufacturing to suppress the system chattering effectively, and then improve the production efficiency of the intelligent manufacturing enterprises.
Keywords: PMSM; position sensorless control; sliding mode observer; chattering suppression; I/F; full speed domain
0 "引 "言
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)无位置传感器控制算法中,反电势积分法易受电机参数变化的影响,且存在定子磁链积分的常值漂移问题[1⁃2];模型参考自适应算法对参数变化比较敏感[3];扩展卡尔曼滤波器算法实时计算量大,对控制芯片依赖度高,动态响应不理想[4⁃5];滑模观测器算法响应迅速,对系统内部参数变化和外部扰动不敏感,计算简单、易于实现[6⁃7]。
采用无位置传感器控制的PMSM易发生高频抖振。主要原因在于滑模观测器常采用不当的切换函数,加上滑模增益常根据设计人员经验定参,且转子位置估计采用开环系统测算,使抖振误差进一步放大,长期处于抖振状态的PMSM不利于智能制造企业生产效益提升[8]。
优化使用滑模观测器的PMSM无位置传感器控制,可从切换函数、滑模增益定参和转子位置估计三方面进行。为避免PMSM在零速起动时的反电动势信息无法被滑模观测器获取并转换为有效的转子位置信息,PMSM起动控制策略需做相应调整,设计合理的转子电流配给方法,使其平稳切换至滑模观测器控制模式,保障在全速域范围内稳定运行。
1 "问题分析
1.1 "滑模观测器
PMSM在静止坐标系[α⁃β]下的数学模型为:
[ddtiαiβ=-RsLiαiβ+1Luαuβ-1Leαeβ,eαeβ=ψfωe-sinθecosθe] (1)
式中:[uα "uβT]、[iα "iβT]、[eα "eβT]分别为[α⁃β]坐标系下的定子电压、电流、反电动势;[θe]为转子位置角;[Rs]为定子电阻;[ωe]为电角速度;[L]为定子绕组电感;[ψf]为永磁体磁链。
在静止坐标系下,滑模观测器数学模型如下:
[ddtiαiβ=-RsLiαiβ+1Luαuβ-1LkZ] (2)
式中:[iα]、[iβ]分别为[α]轴、[β]轴定子电流观测值;[k]为滑模增益;[Z]为切换函数。
滑模面选取观测值与实际值之差,其表达式为:
[s=sαsβ=iα-iαiβ-iβ] (3)
由式(1)~式(3)可得滑模观测器动态误差方程为:
[ddtsαsβ=-RsLsαsβ-1LkZ+1Leαeβ] (4)
滑模观测器的滑模面切换函数选定后,滑模增益[k]值的选取通常根据设计经验试探性取值,然后根据系统输出情况调整。
系统进入滑模面后,将[s=s=0]代入式(1)可得:
[kZ=eαeβ=ψfωe-sinθecosθe] (5)
由式(5)可知,控制信号[kZ]中包含PMSM反电动势信息。对该控制信号进行滤波处理,可得到反映转子位置信息[θe]的反电动势观测值[eα]、[eβ],有:
[eαeβ=kZωcs+ωc] (6)
式中[ωc]为滤波器截止频率,后续常采用解析几何算法来估计转子位置。为防止角度观测值存在相位延迟,利用转速观测值[ωe]和低通滤波器截止频率[ωc]对角度观测值[θe]进行补偿,有:
[θe=-arctaneαeβ+arctanωeωc] (7)
1.2 "抖振原因分析
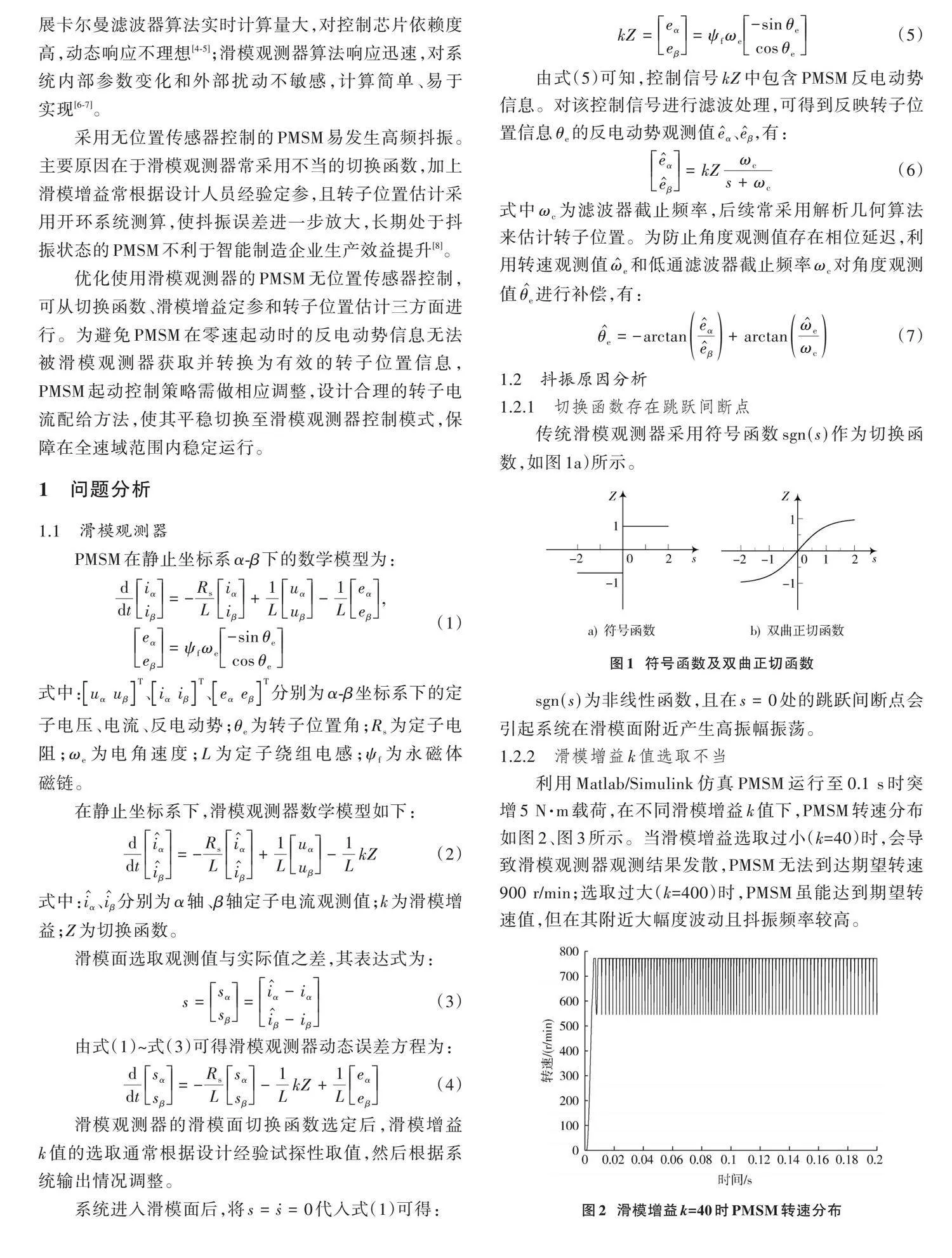
1.2.1 "切换函数存在跳跃间断点
传统滑模观测器采用符号函数[sgn(s)]作为切换函数,如图1a)所示。
[sgn(s)]为非线性函数,且在[s=0]处的跳跃间断点会引起系统在滑模面附近产生高振幅振荡。
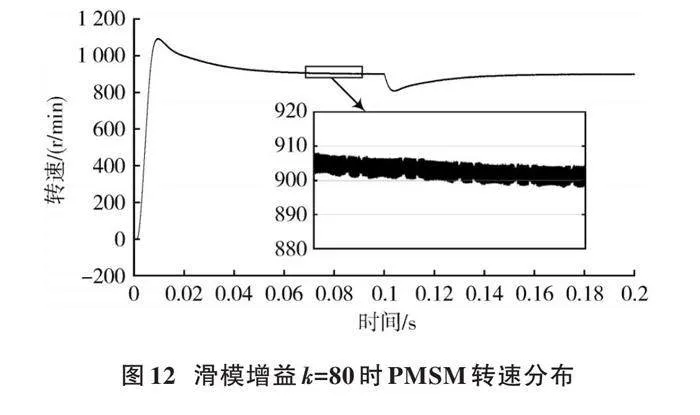
1.2.2 "滑模增益[k]值选取不当
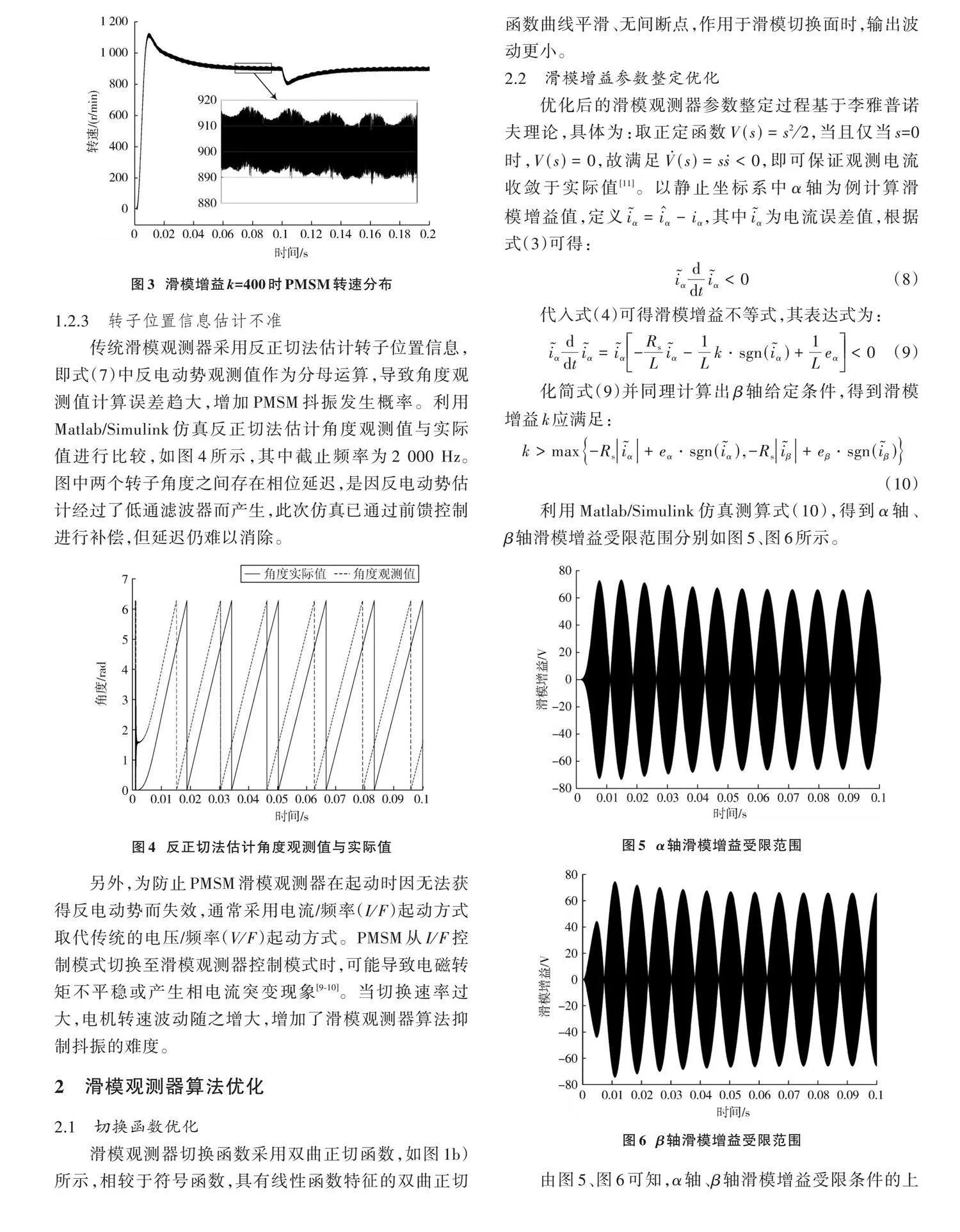
利用Matlab/Simulink仿真PMSM运行至0.1 s时突增5 N·m载荷,在不同滑模增益[k]值下,PMSM转速分布如图2、图3所示。当滑模增益选取过小([k]=40)时,会导致滑模观测器观测结果发散,PMSM无法到达期望转速900 r/min;选取过大([k]=400)时,PMSM虽能达到期望转速值,但在其附近大幅度波动且抖振频率较高。
1.2.3 "转子位置信息估计不准
传统滑模观测器采用反正切法估计转子位置信息,即式(7)中反电动势观测值作为分母运算,导致角度观测值计算误差趋大,增加PMSM抖振发生概率。利用Matlab/Simulink仿真反正切法估计角度观测值与实际值进行比较,如图4所示,其中截止频率为2 000 Hz。图中两个转子角度之间存在相位延迟,是因反电动势估计经过了低通滤波器而产生,此次仿真已通过前馈控制进行补偿,但延迟仍难以消除。
另外,为防止PMSM滑模观测器在起动时因无法获得反电动势而失效,通常采用电流/频率([IF])起动方式取代传统的电压/频率([VF])起动方式。PMSM从[IF]控制模式切换至滑模观测器控制模式时,可能导致电磁转矩不平稳或产生相电流突变现象[9⁃10]。当切换速率过大,电机转速波动随之增大,增加了滑模观测器算法抑制抖振的难度。
2 "滑模观测器算法优化
2.1 "切换函数优化
滑模观测器切换函数采用双曲正切函数,如图1b)所示,相较于符号函数,具有线性函数特征的双曲正切函数曲线平滑、无间断点,作用于滑模切换面时,输出波动更小。
2.2 "滑模增益参数整定优化
优化后的滑模观测器参数整定过程基于李雅普诺夫理论,具体为:取正定函数[V(s)=s22],当且仅当[s]=0时,[V(s)=0],故满足[V(s)=sslt;0],即可保证观测电流收敛于实际值[11]。以静止坐标系中[α]轴为例计算滑模增益值,定义[iα=iα-iα],其中[iα]为电流误差值,根据式(3)可得:
[iαddtiαlt;0] (8)
代入式(4)可得滑模增益不等式,其表达式为:
[iαddtiα=iα-RsLiα-1Lk⋅sgn(iα)+1Leαlt;0] (9)
化简式(9)并同理计算出[β]轴给定条件,得到滑模增益[k]应满足:
[kgt;max-Rsiα+eα⋅sgn(iα),-Rsiβ+eβ⋅sgn(iβ)]
(10)
利用Matlab/Simulink仿真测算式(10),得到[α]轴、[β]轴滑模增益受限范围分别如图5、图6所示。
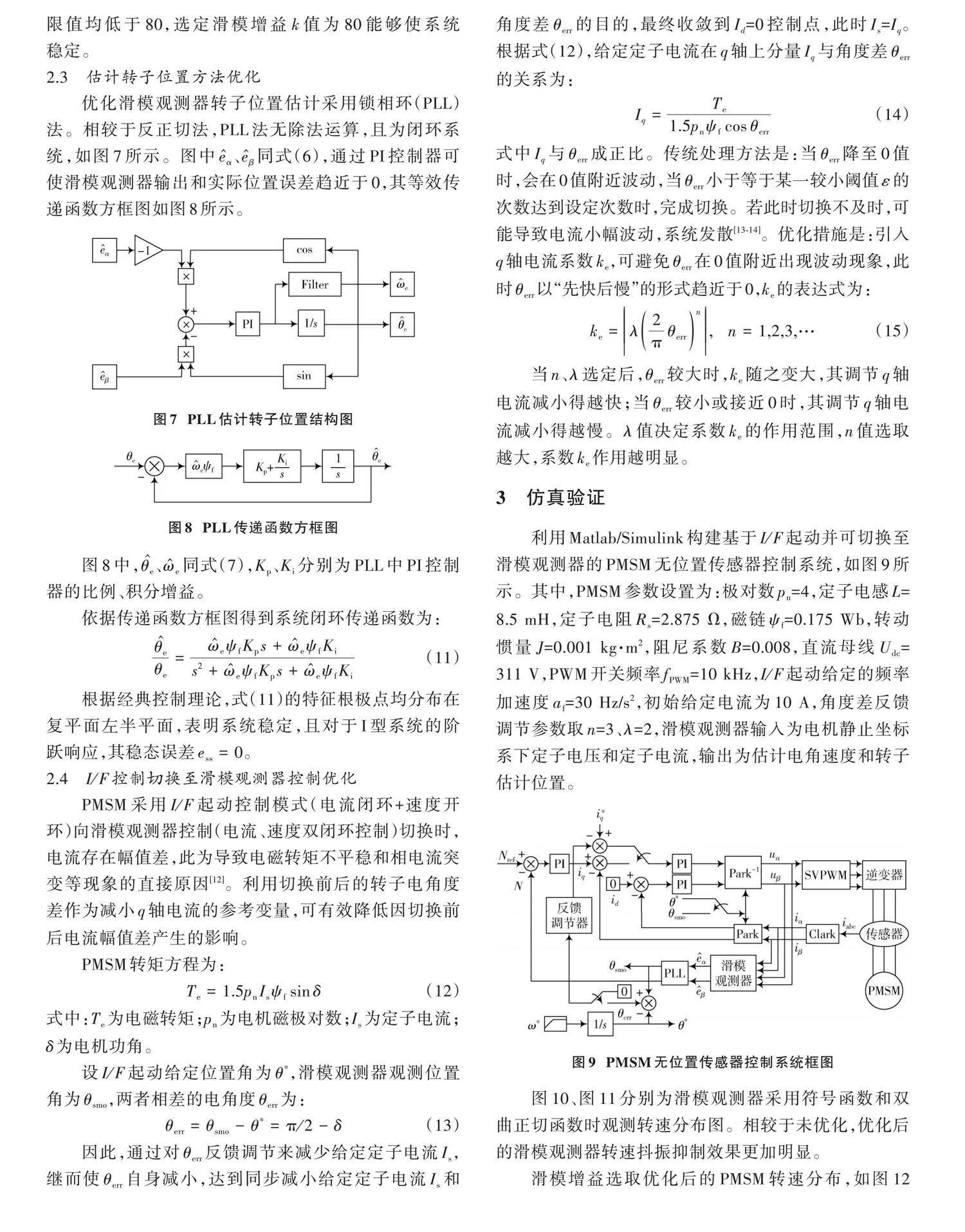
由图5、图6可知,[α]轴、[β]轴滑模增益受限条件的上限值均低于80,选定滑模增益[k]值为80能够使系统稳定。
2.3 "估计转子位置方法优化
优化滑模观测器转子位置估计采用锁相环(PLL)法。相较于反正切法,PLL法无除法运算,且为闭环系统,如图7所示。图中[eα]、[eβ]同式(6),通过PI控制器可使滑模观测器输出和实际位置误差趋近于0,其等效传递函数方框图如图8所示。
图8中,[θe]、[ωe]同式(7),[Kp]、[Ki]分别为PLL中PI控制器的比例、积分增益。
依据传递函数方框图得到系统闭环传递函数为:
[θeθe=ωeψfKps+ωeψfKis2+ωeψfKps+ωeψfKi] (11)
根据经典控制理论,式(11)的特征根极点均分布在复平面左半平面,表明系统稳定,且对于I型系统的阶跃响应,其稳态误差[ess=0]。
2.4 "[IF]控制切换至滑模观测器控制优化
PMSM采用[IF]起动控制模式(电流闭环+速度开环)向滑模观测器控制(电流、速度双闭环控制)切换时,电流存在幅值差,此为导致电磁转矩不平稳和相电流突变等现象的直接原因[12]。利用切换前后的转子电角度差作为减小[q]轴电流的参考变量,可有效降低因切换前后电流幅值差产生的影响。
PMSM转矩方程为:
[Te=1.5pnIsψfsinδ] (12)
式中:[Te]为电磁转矩;[pn]为电机磁极对数;[Is]为定子电流;[δ]为电机功角。
设[IF]起动给定位置角为[θ*],滑模观测器观测位置角为[θsmo],两者相差的电角度[θerr]为:
[θerr=θsmo-θ*=π2-δ] (13)
因此,通过对[θerr]反馈调节来减少给定定子电流[Is],继而使[θerr]自身减小,达到同步减小给定定子电流[Is]和角度差[θerr]的目的,最终收敛到[Id]=0控制点,此时[Is]=[Iq]。根据式(12),给定定子电流在[q]轴上分量[Iq]与角度差[θerr]的关系为:
[Iq=Te1.5pnψfcosθerr] (14)
式中[Iq]与[θerr]成正比。传统处理方法是:当[θerr]降至0值时,会在0值附近波动,当[θerr]小于等于某一较小阈值[ε]的次数达到设定次数时,完成切换。若此时切换不及时,可能导致电流小幅波动,系统发散[13⁃14]。优化措施是:引入[q]轴电流系数[ke],可避免[θerr]在0值附近出现波动现象,此时[θerr]以“先快后慢”的形式趋近于0,[ke]的表达式为:
[ke=λ2πθerrn, " "n=1,2,3,…] (15)
当[n]、[λ]选定后,[θerr]较大时,[ke]随之变大,其调节[q]轴电流减小得越快;当[θerr]较小或接近0时,其调节[q]轴电流减小得越慢。[λ]值决定系数[ke]的作用范围,[n]值选取越大,系数[ke]作用越明显。
3 "仿真验证
利用Matlab/Simulink构建基于[IF]起动并可切换至滑模观测器的PMSM无位置传感器控制系统,如图9所示。其中,PMSM参数设置为:极对数[pn]=4,定子电感[L]=8.5 mH,定子电阻[Rs]=2.875 Ω,磁链[ψf]=0.175 Wb,转动惯量[J]=0.001 kg·m2,阻尼系数[B]=0.008,直流母线[Udc]=311 V,PWM开关频率[fPWM]=10 kHz,[IF]起动给定的频率加速度[af]=30 Hz/s2,初始给定电流为10 A,角度差反馈调节参数取[n]=3、[λ]=2,滑模观测器输入为电机静止坐标系下定子电压和定子电流,输出为估计电角速度和转子估计位置。
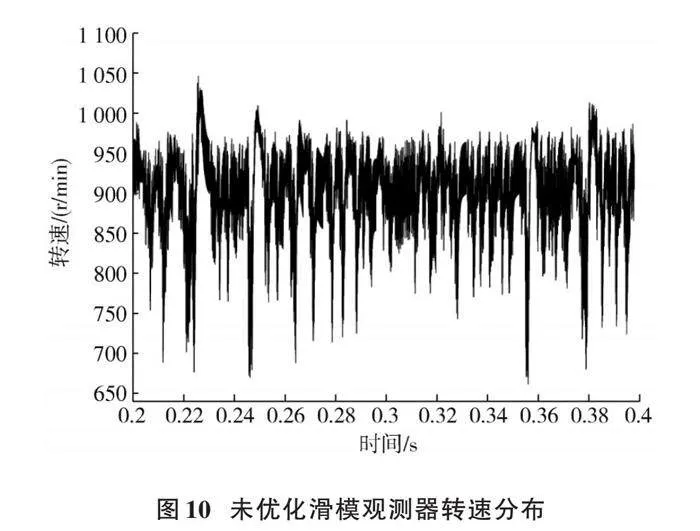
图10、图11分别为滑模观测器采用符号函数和双曲正切函数时观测转速分布图。相较于未优化,优化后的滑模观测器转速抖振抑制效果更加明显。
滑模增益选取优化后的PMSM转速分布,如图12所示。与图2(滑模增益[k]=40)相比,图12(滑模增益[k]=80)中PMSM转速能快速收敛于期望值;与图3(滑模增益[k]=400)相比,图12中PMSM转速抖振振幅更小。表明滑模增益参数整定过程优化有效。
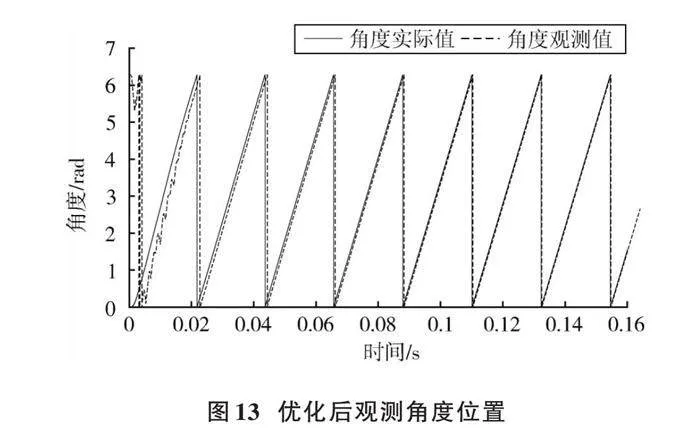
PMSM滑模观测器采用PLL法估计转子位置,得出角度观测值与实际值之间的对比如图13所示。在初动阶段,估计结果仍存在误差,但因PLL法所具有的闭环结构,在PMSM转子经过4转后,角度观测值误差趋近于0。与图4所示反正切法估计角度观测值相比,优化后的PMSM转子位置信息在精准度和响应速度方面有明显提升。
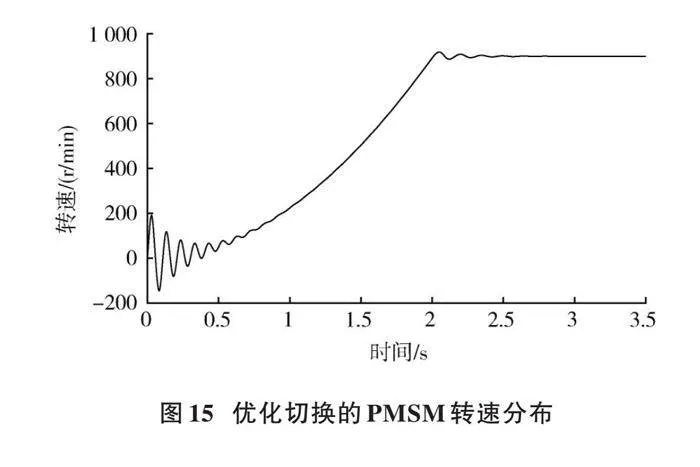
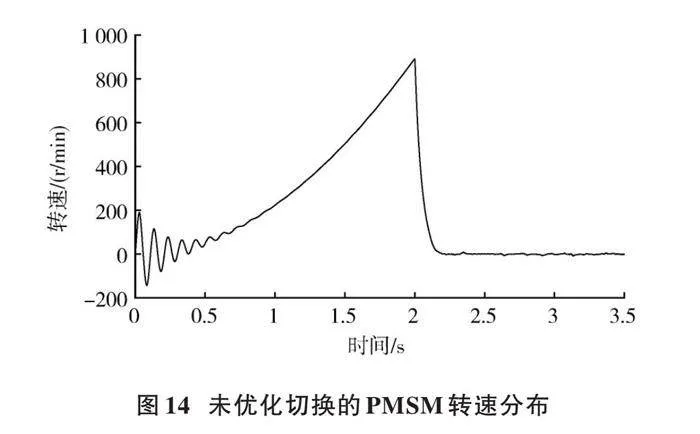
设定PMSM采用[IF]控制零速起动,至900 r/min时,自动切换至滑模观测器控制。未经优化的切换动作后,电机转速变化如图14所示,从高值急剧下降至0,表明电机控制已失效,切换失败。同等条件下使用优化的切换方式,电机转速变化如图15所示,在切换点短时小幅波动后电机即进入平稳段,转速最终维持在900 r/min左右,表明电机已从[IF]起动控制模式平顺切换至滑模观测器控制模式。
4 "结 "语
本文分别对构建滑模观测器的滑模面切换函数、滑模增益选取、转子位置估计三个环节进行机理分析,得出传统滑模观测器建模方法致使无位置传感器控制PMSM发生抖振的原因所在,并对应提出优化方法。考虑到零速起动的PMSM在由[IF]控制向滑模观测器控制切换时,可能发生失效问题,因此引入[q]轴电流系数,平抑[IF]起动给定位置角与滑模观测器观测位置角之间的差值波动,使电机平稳切换至滑模观测器控制模式。仿真结果表明,经过各层面多角度优化,无位置传感器控制PMSM从零速到高速值运转切换平稳,转速波动小,系统抖振问题得到有效抑制。
参考文献
[1] 张祺琛,刘细平,王方凯文,等.基于改进滑模观测器的永磁同步电机无传感器控制[J].组合机床与自动化加工技术,2022(1):85⁃88.
[2] PENG Y, YIN Y C, WANG X J, et al. PMSM torque ripple minimization based on novel low carrier ratio PWM technique [J]. IEEE transactions on power electronics, 2022, 37(9): 11071⁃11084.
[3] 赵毅恒,宁博文,卢少武,等.基于[IF]起动和扩展卡尔曼滤波的永磁同步电机全速域无传感器控制方法[J].电机与控制应用,2022,49(2):1⁃7.
[4] 于安博,刘利,阚志忠,等.高频脉振信号注入永磁同步电机无滤波器初始位置辨识方法[J].电工技术学报,2021,36(4):801⁃809.
[5] ISMAL M M, XU W, GE J, et al. Adaptive linear predictive model of an improved predictive control of permanent magnet synchronous motor over different speed regions [J]. IEEE transactions on power electronics, 2022, 37(12): 15338⁃15355.
[6] 王要强,朱亚昌,冯玉涛,等.永磁同步电机新型趋近律滑模控制策略[J].电力自动化设备,2021,41(1):192⁃198.
[7] WANG F, WANG J M, WANG K, et al. Adaptive backstepping sliding mode control of uncertain semi⁃strict nonlinear systems and application to permanent magnet synchronous motor [J]. Journal of systems science amp; complexity, 2021, 34(2): 552⁃571.
[8] XU J Q, JIN W B, HONG G, et al. Modeling and analysis of oil frictional loss in wet⁃type permanent magnet synchronous motor for aerospace electro⁃hydrostatic actuator [J]. Chinese journal of aeronautics, 2023, 36(11): 328⁃341.
[9] CHOO K M, WON C Y. Flying start of permanent⁃magnet⁃synchronous⁃machine drives based on a variable virtual resistance [J]. IEEE transactions on industrial electronics, 2020, 68(10): 9218⁃9228.
[10] 章春娟,王慧贞,刘伟峰,等.基于宽频带同步基频提取滤波器的永磁同步电机转子位置与转速估计[J].电工技术学报,2022,37(4):882⁃891.
[11] 董锋斌,刘昌建,赵永玮,等.基于扩张状态观测器的DFIG网侧变换器滑模控制[J].电力工程技术,2023,42(2):206⁃214.
[12] 肖仁鑫,沈培航.永磁同步电机全速域无位置传感器复合控制[J].组合机床与自动化加工技术,2022(11):79⁃83.
[13] 周涛,蒋全.无传感器永磁同步电机全速范围控制技术综述[J].电子科技,2021,34(4):59⁃69.
[14] 吴春,傅子俊,孙明轩,等.基于扩张状态观测器负载转矩补偿的永磁同步电机全速范围无位置传感器控制[J].电工技术学报,2020,35(z1):172⁃181.
作者简介:罗 "帅(1999—),男,湖北天门人,硕士研究生,研究方向为永磁同步电机无传感器控制。
张良力(1981—),男,湖北武汉人,博士研究生,副教授,主要从事电气工程及其自动化专业的教学与科研工作。
猜你喜欢
现代电子技术(2017年1期)2017-02-16 11:49:32
汽车工程学报(2016年5期)2017-01-16 02:42:50
计算技术与自动化(2016年4期)2017-01-11 14:06:23
电子技术与软件工程(2016年19期)2016-12-19 18:43:28
中国科技博览(2016年15期)2016-08-23 00:59:37
电脑知识与技术(2016年13期)2016-06-29 21:41:37
科技视界(2016年12期)2016-05-25 11:07:56
电脑知识与技术(2016年2期)2016-03-22 22:21:46
电脑知识与技术(2016年1期)2016-03-22 15:49:38
哈尔滨理工大学学报(2015年6期)2016-02-18 00:26:49
