基于改进YOLOv5的火车连接钩舌识别方法
2024-10-25 00:00王冬伟武彬宋刚高硕韩昊宇丁佳毅董帆万书亭
河北工业科技 2024年5期



摘 要:为了准确识别不同类型钩舌,确保自动复钩机器人能够根据火车连接钩舌状态实时调整机械臂的位姿,提出了一种基于改进YOLOv5的火车连接钩舌识别方法。首先,将YOLOv5主干网络中原有的C3模块替换为梯度流丰富的C2F模块(cross feature module),YOLOv5颈部网络中原有的C3模块替换为基于FasterNet模块构建的轻量化C3_FasterNet模块,并将CoordConv模块嵌入到YOLOv5的主干网络末端。其次,基于现场实测的火车连接钩舌图像进行了识别测试。结果表明: 改进的YOLOv5算法在降低模型参数量的同时,可以有效提升对钩舌目标的检测精度,火车钩舌识别精度达到了98.7%,相较于原始算法,模型参数量减少了10.8%。研究结果为复钩机器人在执行钩舌复位和车厢连接操作方面提供了一种有效的解决方案。
关键词:模式识别;图像处理;复钩机器人;火车钩舌;目标识别;YOLOv5
中图分类号:TP391.41 文献标识码:A
Recognition method of train connection hook tongue
based on improved YOLOv5
Abstract:
In order to accurately identify different types of train connection hook tongues and ensure that the automatic re-hook robot adjusts the pose of the robot arm in real time according to the status of the hook tongues, a train connection hook tongue recognition method based on an improved YOLOv5 model was proposed. First, the original C3 module in the YOLOv5 backbone network was replaced with the C2F module (cross feature module) of rich gradient flow, and the original C3 module in the YOLOv5 neck network was replaced with the lightweight C3_FasterNet module based on the FasterNet block, and the CoordConv module was embedded at the end of the YOLOv5 backbone network.Second, the recognition test was carried out based on the spot measured image of the train connection hook tongue. The results show that the improved YOLOv5 algorithm can effectively improve the detection accuracy of the hook tongue target while reducing the numbers of model parameters. The identification accuracy of the hook tongue reaches 98.7%, and the numbers of model parameters are reduced by 10.8% compared with the original algorithm, which can provide an effective solution for the re-hook robot in the operation of hook tongue resetting and carriage connection.
Keywords:
pattern recognition; image processing; re-hook robot; train connection hook tongue; target recognition; YOLOv5
随着铁路交通运输的不断发展,火车运输成为重要的物流方式之一。在火车运输过程中,车厢之间的连接采用钩舌连接,连接牢固且能够承受牵引力[1-3]。在燃煤电厂输煤系统翻车、卸煤过程中,需要进行车厢的分离和连接工作,即火车连接的车钩和钩舌的复钩操作。然而,人工复钩需要操作人员手动进行,如果操作不当或有疏忽,可能导致车厢连接不牢固,从而引发安全事故。而自动复钩能够快速、准确完成连接,减少人工操作,降低人员受伤的风险,提高车厢的周转率,进而提高整个供应链的作业效率。
目前关于自动复钩机器人的研究还比较少,文献[4]设计了一种轨道式摘钩机器人,对火车车钩的连接手柄的识别率达到了94.1%,对复钩机器人及对钩舌自动识别的研究具有较高的借鉴价值。近年来,深度学习在图像自动识别领域取得了显著进展[5-6]。YOLO是一种快速、简单且高效的目标检测算法,在处理实时性要求较高的应用场景时得到了广泛应用[7-8]。文献[9]提出了一种改进YOLOv5的红外船舶目标识别算法,通过改变损失函数优化算法的回归过程,避免了误检和漏检的问题。文献[10]提出了一种改进YOLOv5目标检测网络模型,通过重新设计金字塔和跳跃连接,取代原有的网络模型,有效捕捉目标的跨尺度特征信息,避免梯度消失现象,提高目标识别的准确率。为了应对在复杂场景下初始锚框难以与目标匹配的问题,文献[11]提出了一种基于YOLOv5的增强多尺度目标检测方法,改进幅度达到5.2%。文献[12]在YOLOv5模型的主干部分加入CASM(convolutional attention for spectral data modeling)注意力机制,使用真实的矿井皮带图像数据集测试了模型的检测性能,mAP(mean average precision)较原始算法提升了20%,达到了95.4%。
自动复钩机器人需要根据火车连接钩舌状态实时调整机械臂的位姿,对实时性要求较高。针对该需求,本文提出了一种基于改进YOLOv5的火车连接钩舌目标识别方法,通过对现有YOLOv5算法的网络模型进行优化设计,以期在减少模型参数量的同时,提升模型的识别精度。
1 火车车厢连接结构分析
车钩位于车厢之间或车头与车厢之间的连接位置,中国现有的车厢均采用对撞式车钩,因其具有连接、牵引及缓冲等优点,得到了广泛应用。车钩有2种状态,分别是连接状态与解锁状态。其中,连接状态是指车钩在后车厢的挤压碰撞下,使得前车与后车的钩舌啮合达到闭锁,该过程称为火车车厢复钩。因此,在2节车厢连接之前,使钩舌处于打开状态很重要。
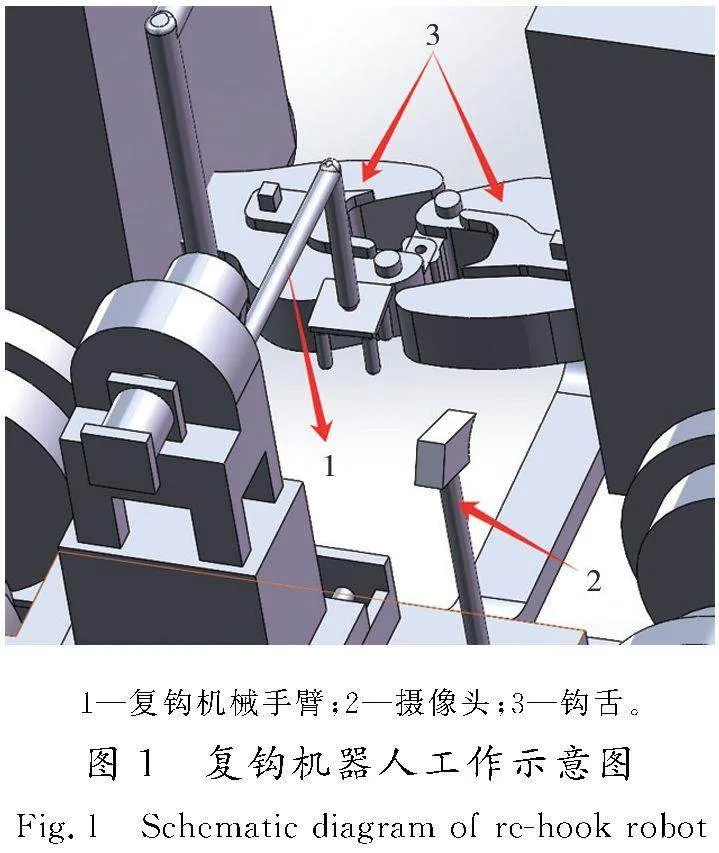
复钩机器人配备的摄像头能够实时检测火车车厢连接用的钩舌及其位置,然后复钩机器人执行机构开始动作,掰开钩舌完成复位,使2节车厢准确连接。一旦完成复钩操作并确认安全,火车可以重新启动并继续行驶。复钩机器人工作示意图如图1所示。
2 基于改进YOLOv5算法的网络模型分析
2.1 基础算法选择
基于YOLOv5算法的灵活性、高效性以及优异的检测精度,将其作为火车钩舌检测的改进算法的基础模型。YOLOv5算法能够快速处理图像并实时输出检测结果,这对于需要实时监测的火车钩舌检测至关重要,能够确保任何异常状态被及时识别和处理,从而保障复钩机器人的安全运行。YOLOv5算法不仅在标准检测环境中表现出色,而且对不同尺度目标的适应性以及在复杂背景下的鲁棒性较好,特别适合在燃煤电厂输煤系统中火车钩舌可能遇到的复杂视觉环境。YOLOv5算法通过自适应锚点和多尺度训练策略,能够有效提高对这些变化的适应能力。此外,YOLOv5算法的网络模型配置灵活,可以根据具体的应用需求调整模型的大小和复杂度,这在资源受限的边缘计算设备上显得尤为重要。YOLOv5算法支持在不牺牲太多性能的前提下对模型进行简化和优化,使得模型不仅能在高性能服务器上运行,也能在现场部署的较低性能设备上有效运行。
2.2 改进YOLOv5的火车连接钩舌识别算法设计
在燃煤电厂输煤系统中,火车钩舌所处环境复杂,受到光线、灰尘等因素的影响,原始YOLOv5算法在提取关键信息时受到限制,可能导致钩舌检测出现错检或漏检。针对上述问题,本文在YOLOv5算法基础上进行了如下改进。
1)主干网络引入C2F模块 通过结合深层和浅层特征,C2F模块增强了模型对不同尺度目标的检测能力。深层特征提供丰富的语义信息,而浅层特征负责细节的捕捉,这种特征融合策略有助于在各种尺度下改善模型的检测精度。
2)主干网络引入CoordConv注意力机制模块 在主干网络末端添加CoordConv注意力机制模块,CoordConv模块通过在卷积层中加入坐标信息,增加了模型对物体空间位置的敏感性,从而能更精确地定位和识别目标,特别是在视觉信息复杂或部分遮挡的场景中。
3)颈部网络优化 将颈部的C3模块替换为基于FasterNet模块设计的轻量型C3_FasterNet模块,旨在提高处理速度的同时保持检测性能,适应实时运行的需求。
2.3 主干网络中C2F模块嵌入设计
在YOLOv5模型的主干网络中,原本的C3模块已被新的C2F模块特征提取模块替代,以提高模型在复杂视觉任务中的性能,C2F模块结构如图2所示[13]。
其中,ConvBNSiLU代表一个序列操作:首先是卷积;其次是批量归一化;最后是激活函数。Split表示将输入特征图分割成多个部分。BottleNeck结构是一种特殊的卷积结构,它能够减少参数量,从而降低模型的计算量。Contact表示将前面的特征图与BottleNeck的输出进行通道维度的拼接。
首先,通过1×1卷积对输入的特征图进行跨通道信息的整合。此步骤关键在于快速有效融合特征信息,从而为后续处理提供准备。其次,通过切片操作,特征图被分割为2部分,增加了特征处理的灵活性。分割后的一部分特征图接受多次BottleNeck处理,每次处理后的结果与最初的1×1卷积结果进行拼接。这种反复拼接的设计模式不仅增强了特征的多样性,而且允许模型在不同处理阶段有效地利用梯度信息。通过这种方式,C2F模块能够综合并强化不同层次的特征,为模型提供更为丰富和复杂的信息。最后的1×1卷积步骤将经过多重处理的特征图压缩回原始通道数,实现了模型的轻量化,并优化了训练效率和输出效果。这一系列优化措施使得C2F模块比原C3模块在处理复杂视觉任务时更为高效和灵活。这种特征提取模块的优势在文献[13]中得到了体现。在该研究中,C2F模块的应用显著改善了YOLOv8n模型在田间环境中识别和分类被遮挡油茶果的能力。与C3模块相比,C2F模块在特征整合和梯度信息的利用上具有明显的优势,尤其适合处理遮挡和动态变化较大的场景。火车钩舌检测是一个要求模型快速准确处理和精准识别高速移动物体的高难度应用。C2F模块通过其增强的特征处理能力和高效的信息整合能力,为这类高要求的实时检测任务提供了理想的解决方案。因此,将C3模块替换为C2F模块不仅优化了模型在火车钩舌检测中的性能,还提高了其整体的识别精度和处理速度。
2.4 主干网络中CoordConv模块嵌入设计
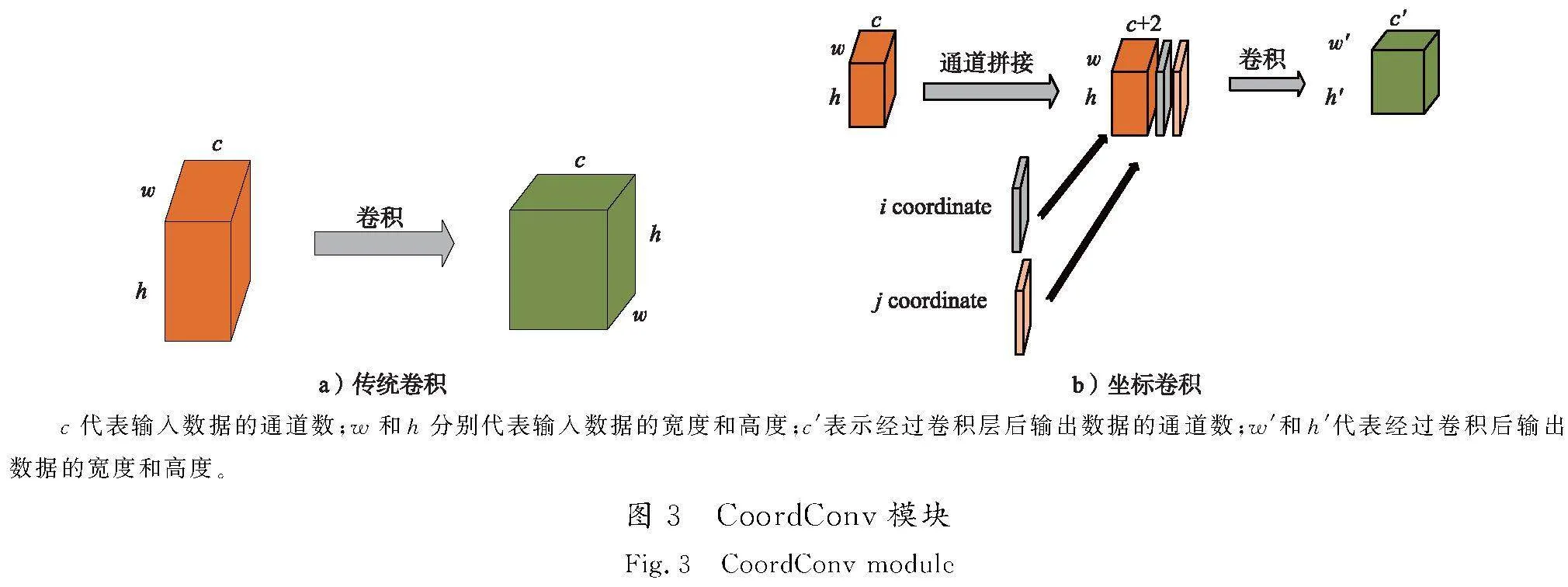
在神经网络训练中,注意力机制帮助模型专注于数据中的关键部分,忽略不重要的信息,这使得网络更有效地学习对结果影响大的特征。为了增强对钩舌位置信息的关注度,采用了 CoordConv 模块,如图3所示[14]。CoordConv 模块通过向传统卷积层引入额外的坐标信息,增强模型对图像空间位置的关注,如图3 b)所示。在输入特征图时添加2个附加通道i coordinate和j coordinate,这2个附加的通道用于注入位置信息到特征图中,使得网络能够更准确地学习和处理有关对象位置的信息。该模块在处理需要精确的空间定位任务(例如目标检测和图像分割等方面)中展现出更高的效率和更高的准确性。在实验中,使用CoordConv模块提升改进模型处理复杂空间关系的能力,从而提升模型整体的目标检测能力。
2.5 颈部网络中C3_FasterNet模块嵌入设计
在轻量级目标检测领域,常见的网络模型(如MobileNet,ShuffleNet和GhostNet)通过深度分离卷积(DWConv)或组卷积(GConv)实现模型轻量化,有效减少了参数量。然而,这些模型对内存需求较高,推理速度较慢,且模型包含的数据拼接、洗牌和池化等操作对推理速度至关重要。尽管轻量化网络通常采用倒残差结构和线性瓶颈设计以进一步减轻模型负担,但深度分离卷积的使用增加了网络宽度和内存访问,尤其在内存受限的移动设备上可能影响实时检测的效率。因此,采用FasterNet轻量化网络结构,不仅减少了计算冗余和内存访问量,而且保持了高效的推理性能,是资源在受限环境中理想的轻量级目标检测解决方案。
FasterNet由1个PConv模块和2个Conv模块构成,FasterNet 模块结构如图4所示[15-16]。1个PConv模块后面跟着2个 PWConv模块, PConv只需在输入通道的一部分上应用常规Conv进行空间特征提取,并保持其余通道不变。对于连续或规则的内存访问,将第1个或最后1个连续的通道视为整个特征图进行计算。为了充分有效利用来自所有通道的信息,进一步将逐点卷积(PWConv)附加到PConv模块上。 在2个 PWConv模块之间有归一化层和激活函数。针对激活函数GeLU的高计算复杂性和在某些硬件上的效率不足,选择使用ReLU作为激活函数。ReLU计算过程简单,使其在需要快速处理的应用中更为高效。ReLU还加速了神经网络的训练,避免了梯度消失的问题,并通过其稀疏激活特性提高了计算效率。
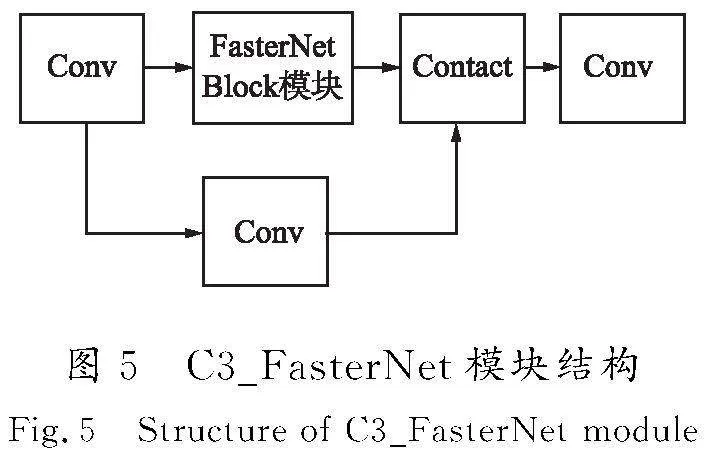
在C3模块的执行过程中,需要进行5次卷积操作,这不仅增加了模型的参数量,也相应地提高了内存消耗。这种增加的资源需求会降低模型的运行效率,延长训练时间,并最终影响到模型的处理速度。为此基于FasterNet模块设计了 C3_FasterNet模块,模块结构如图5所示。该模块能够在保证模型精度的同时,大幅度降低参数量和计算量,加快原始网络的推理速度。
3 实验及结果分析
3.1 数据集制作与扩充
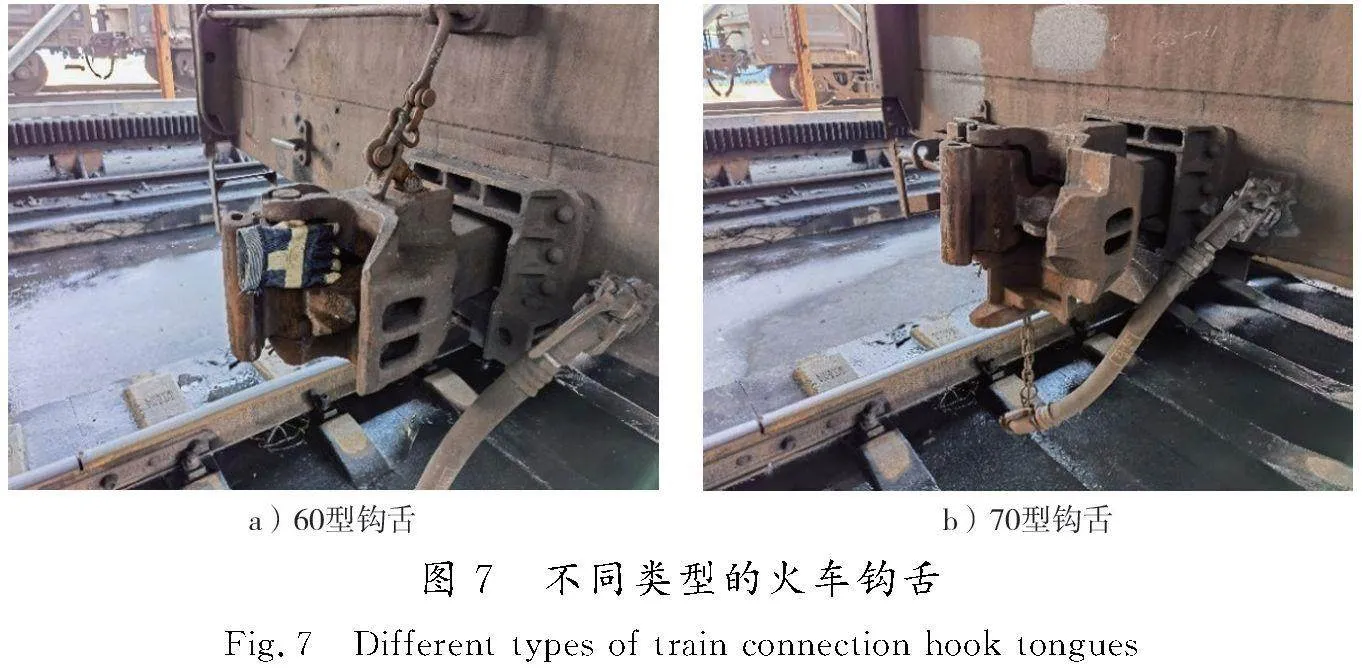
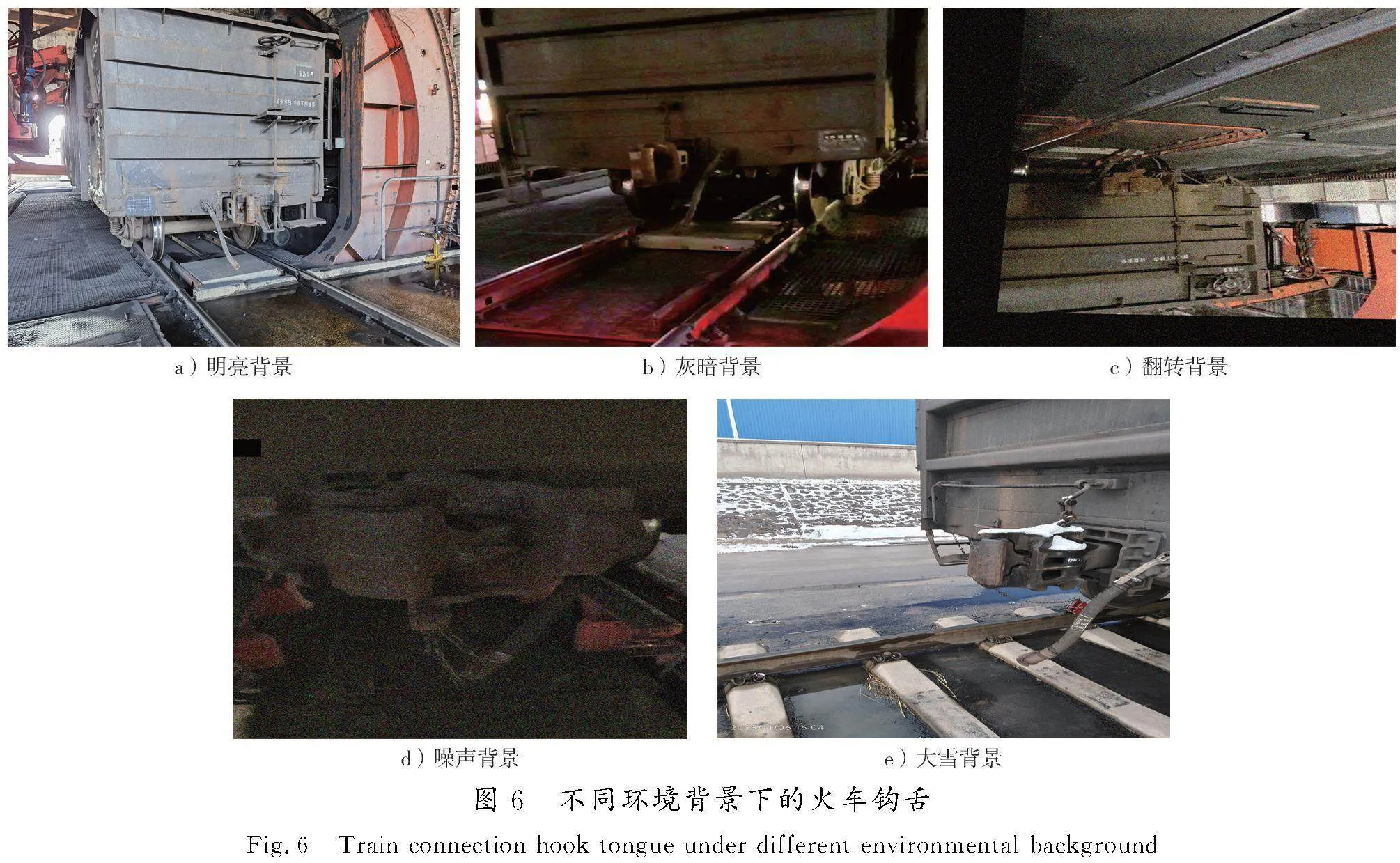
自动复钩机器人在执行打开钩舌操作时需要准确识别并定位钩舌。为了实现这一目标,机器人必须学习和记忆不同类型火车钩舌的外观特征。实验数据集包含来自不同火车车厢连接部位的图像,涵盖了不同型号、不同环境背景下的火车钩舌(见图6),共计收集了3 000张图像。这些图像用于训练目标识别模型,使其能够辨识不同类型的钩舌。利用Labelimg工具对所有图片进行标注。根据摘取方式不同将火车钩舌分为2类,分别为60型和70型钩舌(见图7),分别设置为“one”和“two” 2种标签。
3.2 评价指标分析
评价指标是衡量目标检测算法质量和性能的重要标准,本文采用精确率(P)、召回率(R)、平均精度(mAP)对模型效果进行评估。其中
mAP@0.5表示在交并比(intersection over union,IoU)阈值设置为0.5 情况下的mAP值。IoU用于衡量预测的边界框与真实边界框之间的重叠程度,当 IoU 阈值设置为 0.5 时,预测的边界框与真实边界框的重叠程度至少达到50%,则认为是有效检测。mAP@0.5:0.95指标计算的是在 IoU 阈值为0.5~0.95(以 0.05 为步长)时的mAP值。模型的参数规模是指构成模型的参数总数,包括权重和偏置等,反映了模型的容量和潜在的学习能力,参数规模较大的模型通常具有更高的学习能力和更复杂的功能,但同时也可能导致更高的计算成本和存储需求。计算指标如式(1)—式(4)所示。
式中:TP(真阳性)是模型成功检测并正确分类的实际目标数量,表示模型正确检测的能力;FP(假阳性)是模型错误标记目标的数目,表示模型的误检情况;FN(假阴性)是模型未能检测到的目标数,表示模型的漏检情况。这些指标共同评估目标检测模型的准确性和可靠性。
式中:N为数据集中检测目标的类别数目;i是当前所属的类别编号。本文中N设置为2,即2种不同类型的车钩。
3.3 损失函数曲线分析
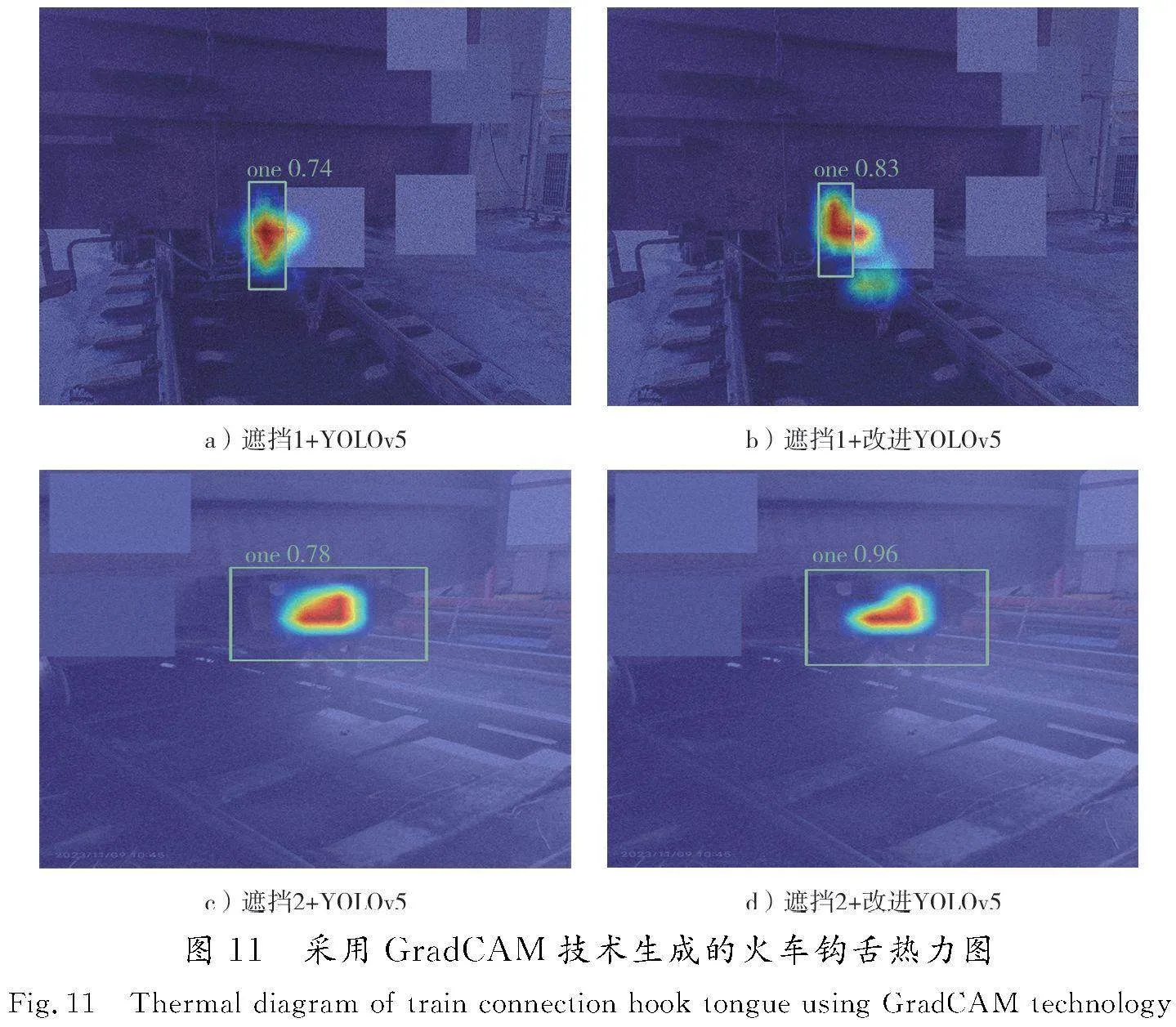
在YOLOv5目标检测模型中包含3种主要损失函数,即定位损失(box_loss)、置信度损失(obj_loss)和分类损失(cls_loss)。定位损失函数计算预测的边界框与实际边界框之间的误差;置信度损失函数用于衡量模型对目标存在的置信程度;分类损失函数用于判断模型预测的类别是否正确。使用改进的YOLOv5算法在自制数据集上进行训练和验证,定位损失、置信度损失和分类损失的损失函数曲线如图8所示。由图8可知,函数损失值随着训练次数的增加而降低,下降的幅值逐渐缓慢,在达到100次左右时,损失值逐渐趋于平缓,表明改进算法模型的函数损失值波动平缓最终达到稳定值,模型训练结束。
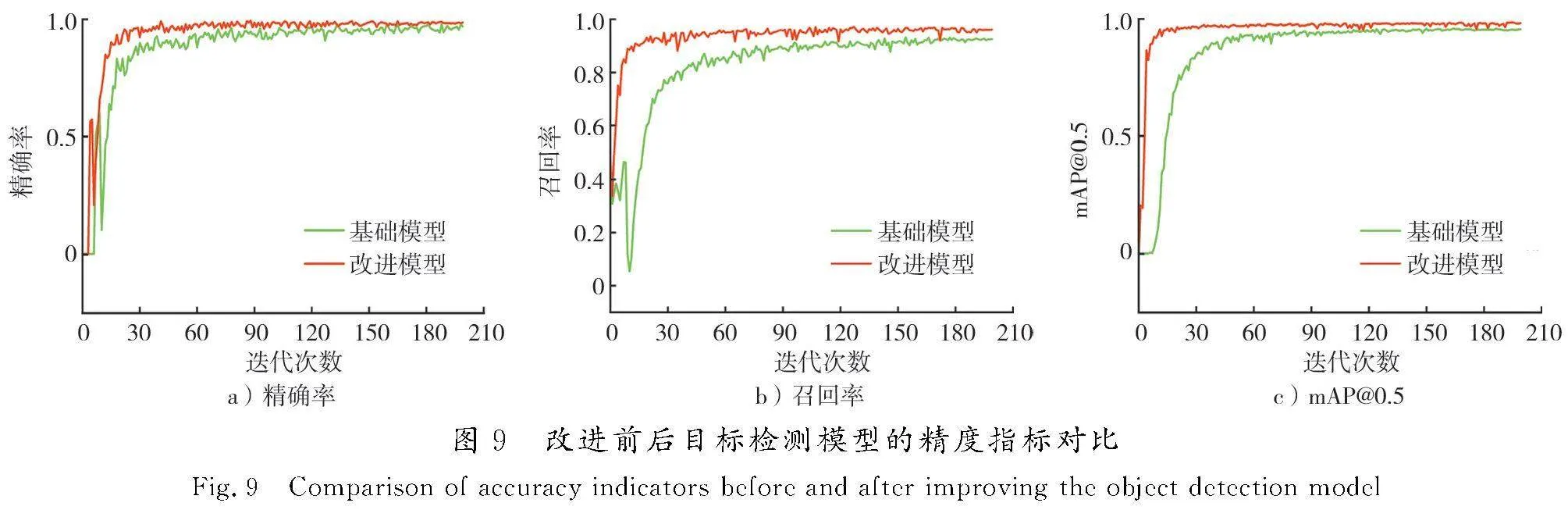
模型的精度指标如图9所示。在YOLOv5模型的基础上融入C3_FasterNet网络、C2F模块与CoordConv注意力机制建立改进模型。与基础模型对比,改进后的模型在各项性能评估指标上均表现出更快的收敛速度和更高的性能。此外,改进模型在达到稳态后展现了更佳的稳定性,表明其更能高效利用训练数据。从定量角度来看,初始训练阶段改进模型性能的提升速度远超基础模型,减少了所需的训练时间,并提高了模型的实用性。
3.4 算法结果分析
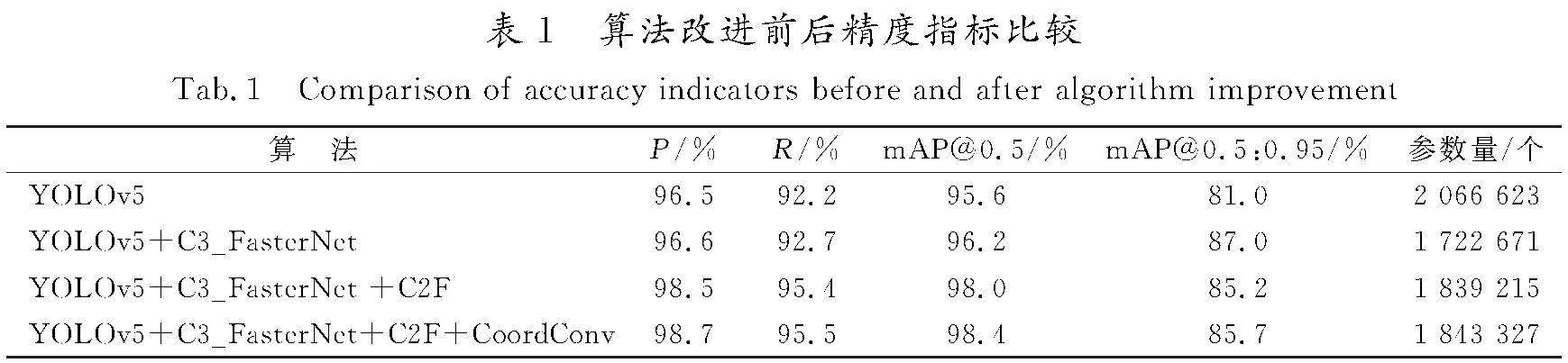
对YOLOv5改进算法与基础算法进行了对比实验,将实验分为基础实验、颈部网络优化、主干网络特征增强。选取召回率(R)、精确率(P)、mAP@0.5,mAP@0.5:0.95与模型的参数量为指标,结果如表1所示。
由表1可知,使用C3_FasterNet模块,在保证精确率、召回率、mAP值的同时,模型的参数量大幅减少。在此基础上使用C2F模块替换掉原有的C3模块,明显提升了模型处理复杂信息的能力。最后加入注意力机制CoordConv有助于增强有效特征,抑制无效特征。与基础模型对比,改进模型在精确率上提高了2.2个百分点,达到了98.7%,召回率上升了3.3个百分点,达到了95.5%,mAP@0.5增长了2.8个百分点,达到了98.4%。同时,模型的参数量从2 066 623个减少到1 843 327个,降低了10.8%,显著提升了计算效率。改进后的模型不仅优化了性能,同时也减轻了计算负荷,能够更好地应用于钩舌的目标检测工作。
3.5 基于Grad-CAM可视化分析
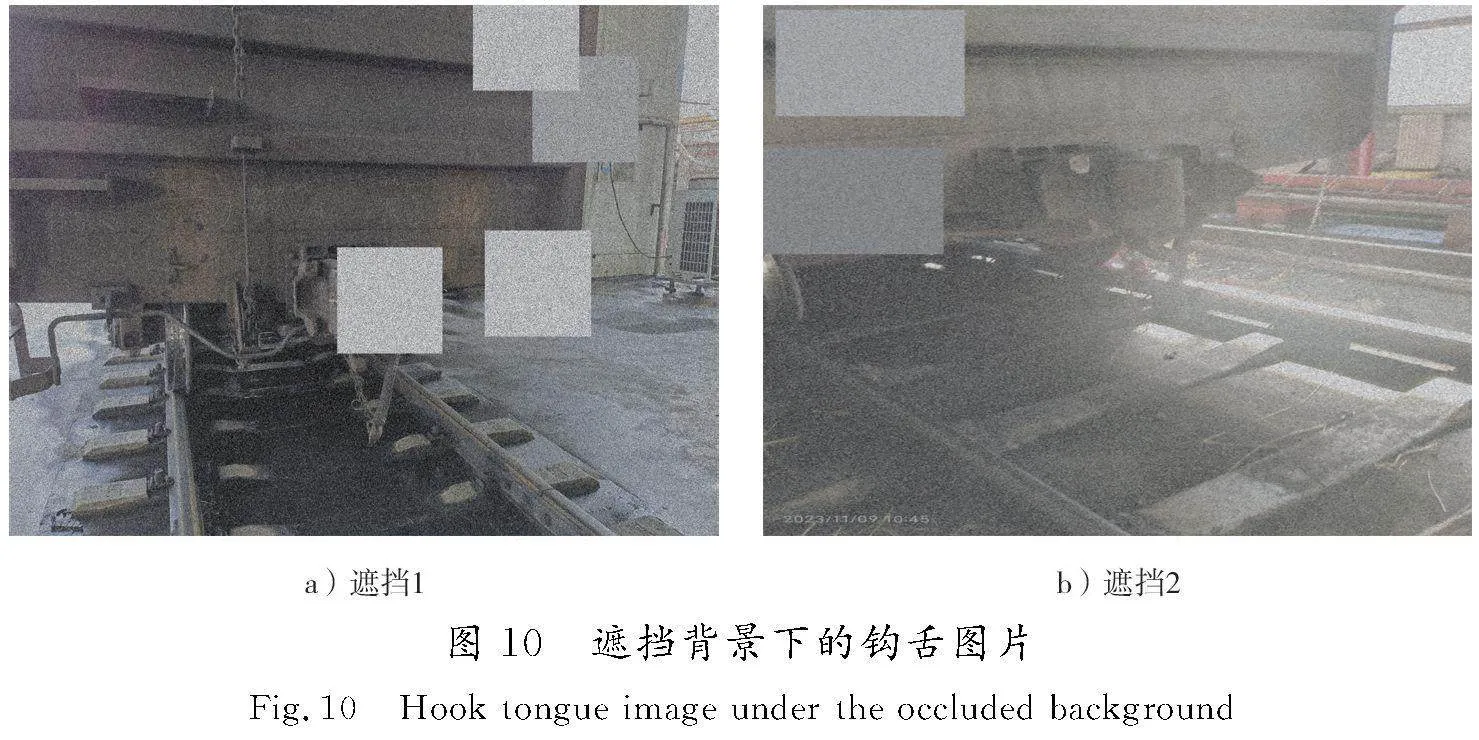
Grad-CAM(gradient-weighted class activation mapping)是一种用于生成卷积神经网络决策可视化解释的技术,主要通过产生热力图以直观地展示卷积神经网络在作出特定决策时哪些区域被赋予了更高的重要性[17]。Grad-CAM常应用于网络的最后一个卷积层以提取类别信息,这个层的输出特征图用高级图像表示。相对于这些特征图的梯度网络类别特定类别得分通过反向传播计算得出,揭示每个单元对类别得分的影响。通过对这些梯度在空间维度上进行全局平均池化,得到每个通道的权重,反映其对目标类别的重要性。将权重与相应特征图相乘并求和,生成类激活映射(class activation mapping,CAM),突出显示模型在作决策时的关注区域。CAM通常以热力图的形式展示可视化模型的关注点,为了阐释 YOLOv5改进算法在模型中的作用,输入2张遮挡背景下的钩舌图片(见图10)。采用GradCAM技术生成模型的热力图,如图11所示。图中不同的颜色表示模型对图像不同区域的关注程度,颜色的变化从蓝色到红色,表示关注程度的递增。通过对比,改进后的算法在钩舌检测上表现出更集中的热力图响应,说明其对钩舌特征的识别能力更强,更适合钩舌检测任务。
3.6 与其他算法对比分析
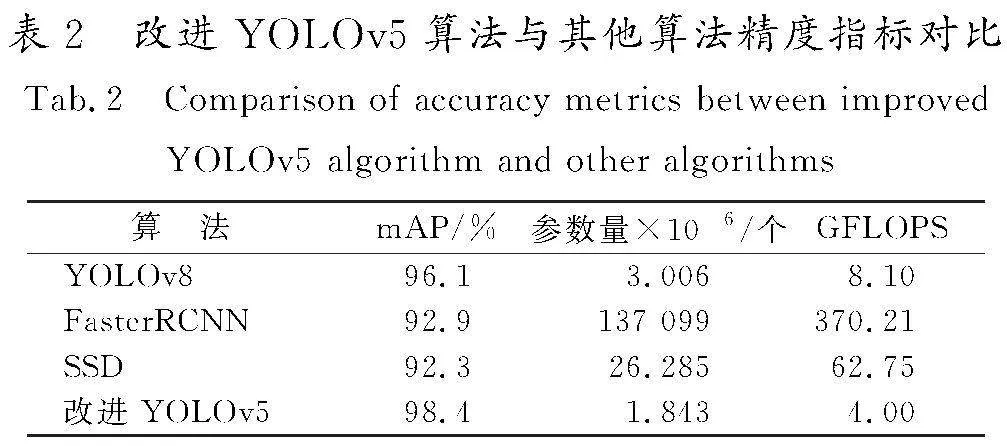
表2为改进YOLOv5算法与其他算法的对比结果。由表2可知,改进的YOLOv5算法在钩舌目标检测中表现出色,具备高准确性和高效率。其mAP达到98.4%,明显优于YOLOv8,FasterRCNN和SSD。参数量仅为1.843 M,远低于其他模型,使得YOLOv5算法更易于在资源有限的设备上部署和运行。此外,其计算量(GFLOPS,每秒10亿次的浮点运算数)低至4.0,相较于FasterRCNN(370.21)和SSD(62.75)的算法显著减小了计算负担。这些特点使改进YOLOv5算法不仅在高精度目标检测上效果显著,而且在处理速度和资源利用上极具优势,特别适合需要快速准确反应的应用场景,如移动或嵌入式系统中的实时目标检测。
4 在自动复钩机器人中的应用分析
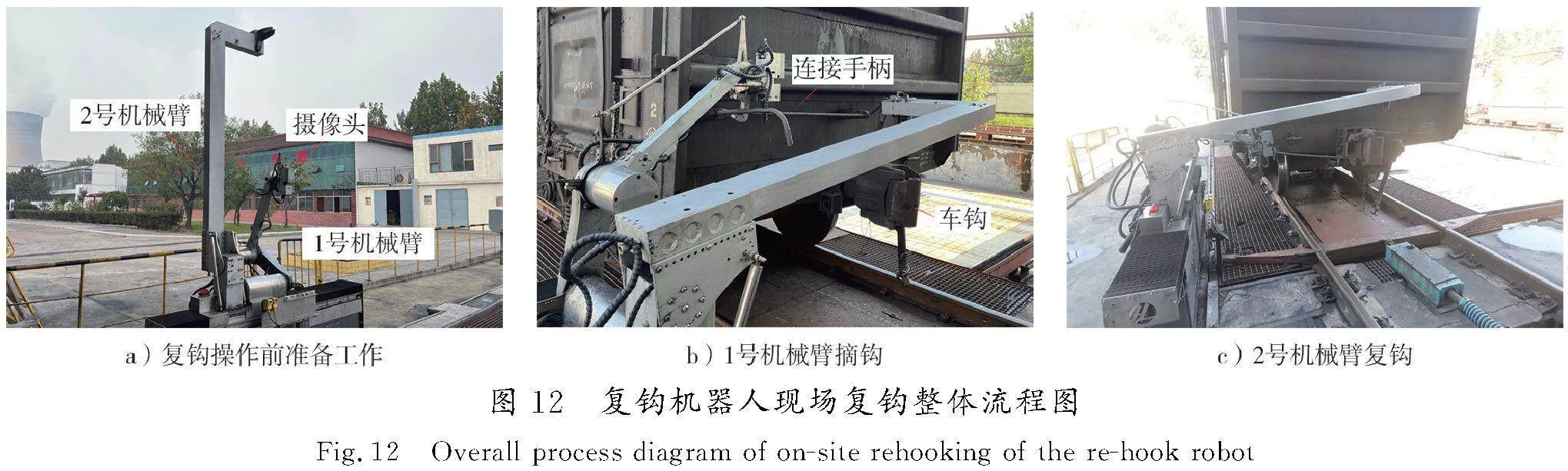
火车进行复钩时,复钩机构的1号机械臂配备了传感器与摄像头,用于自动识别手柄的位置。一旦手柄被识别,1号机械臂自动扳动手柄松开钩舌。2号机械臂被激活,并使用传感器与摄像头识别钩舌的准确位置,自动执行掰开钩舌的动作。掰开钩舌完成复位,使2节车厢准确连接。一旦完成复钩操作并确认安全,火车可以重新启动并继续行驶。这个流程中2个机械臂各自负责不同的任务,协同工作实现整个复钩过程。图12为复钩机器人现场复钩整体流程图。
5 结 语
为了使复钩机器人在移动过程中快速识别火车钩舌的类型和位置,保证机器人的实时检测性能,本文提出了一种改进YOLOv5的火车连接钩舌目标识别算法,主要研究结论如下。
1)在主干网络中添加C2F模块与CoordConv注意力机制模块,可实现在主干网络中并行提取不同尺度的特征,提高网络的感受野,增强对目标钩舌的识别能力,识别精度达到了98.7%,与基础算法相比提升了2.2个百分点。
2)在颈部网络中添加轻量型的C3_FasterNet模块,可减少网络的计算复杂度和模型大小。在保持较高性能的同时,模型的参数量相较于基础算法减少了10.8%,有效提升了模型的运行效率与推理速度。
3)通过可视化分析,改进YOLOv5算法较原始算法,可以更准确识别火车钩舌的所在位置。基于改进YOLOv5算法研制的自动复钩机器人成功实现了火车钩舌的识别和复钩。
钩舌目标识别会受到恶劣复杂环境因素的干扰,使得模型难以保持稳定的性能。为了克服这些局限性,未来可以利用数据增强技术提供更多样化、更丰富的数据集,提高模型对恶劣复杂环境的适应性,以确保模型能够更好地捕捉不同类型钩舌的特征,提高钩舌目标识别的鲁棒性。
参考文献/References:
[1] 田晓晨,朱涛,王超,等.铁路重载货车钩舌疲劳裂纹萌生寿命分析[J].机械强度,2022,44(3):696-704.
TIAN Xiaochen,ZHU Tao,WANG Chao,et al.Analysis on fatigue crack initiation life of coupler knuckle of railway heavy-haul wagon[J].Journal of Mechanical Strength,2022,44(3):696-704.
[2] 王超,朱涛,肖守讷,等.基于分离体子模型的重载货车钩舌三维裂纹扩展研究[J].铁道学报,2022,44(8):42-49.
WANG Chao,ZHU Tao,XIAO Shoune,et al.Research on 3D crack propagation of heavy-haul wagon coupler knuckle based on separated body submodel[J].Journal of the China Railway Society, 2022,44(8):42-49.
[3] 尹敏轩,朱涛,杨冰,等.基于可靠性的重载货车钩舌疲劳断裂寿命[J].机械工程学报,2021,57(4):210-218.
YIN Minxuan,ZHU Tao,YANG Bing,et al.Fatigue fracture life of heavy-haul wagon′s coupler knuckle based on reliability[J].Journal of Mechanical Engineering,2021,57(4):210-218.
[4] 张渊博.铁路自动摘钩机器人设计及车钩视觉检测[D].沈阳:沈阳工业大学,2020.
ZHANG Yuanbo.Design of Railway Automatic Unhook Robot and Visual Inspection of Couplers[D]. Shenyang:Shenyang University of Technology,2020.
[5] 祝铭悦,牛梓儒,万勇,等.基于图像的地铁车站施工人员不安全行为识别研究[J].河北工业科技,2023,40(1):27-32.
ZHU Mingyue,NIU Ziru,WAN Yong,et al.Research on identification of unsafe behaviors of construction personnel in subway station based on images[J].Hebei Journal of Industrial Science and Technology, 2023,40(1):27-32.
[6] 董春峰,杨春金,周万珍.一种基于感受野增强的人脸检测方法[J].河北工业科技,2022,39(6):474-479.
DONG Chunfeng,YANG Chunjin,ZHOU Wanzhen.A face detection method based on perceptual field enhancement[J].Hebei Journal of Industrial Science and Technology,2022,39(6):474-479.
[7] 刘亚姣,于海涛,刘宝顺,等.基于YOLOv3的H型钢表面缺陷检测系统[J].河北工业科技, 2021,38(3):231-235.
LIU Yajiao,YU Haitao,LIU Baoshun,et al.H-beam surface defect detection system based on YOLOv3 algorithm[J].Hebei Journal of Industrial Science and Technology,2021,38(3):231-235.
[8] 武宇平,刘海旭,吴劲芳,等.改进的YOLOv3-Tiny网络在风机叶片损伤检测中的应用[J].河北工业科技,2021,38(5):401-408.
WU Yuping,LIU Haixu,WU Jinfang,et al.Application of improved YOLOv3-Tiny network in fan blade damage detection[J].Hebei Journal of Industrial Science and Technology,2021,38(5):401-408.
[9] 刘芬,孙杰,张帅,等.基于YOLOv5的红外船舶目标检测算法[J].红外与激光工程,2023,52(10):214-225.
LIU Fen,SUN Jie,ZHANG Shuai,et al.Infrared ship target detection algorithm based on YOLOv5[J].Infrared and Laser Engineering,2023,52(10):214-225.
[10]刘建骐,闫河,王潇棠,等.改进金字塔和跳跃连接的YOLOv5目标检测网络[J].控制与决策,2023,38(6):1730-1736.
LIU Jianqi,YAN He,WANG Xiaotang,et al.YOLOv5 object detection network with improved pyramid and skip connection[J].Control and Decision,2023,38(6):1730-1736.
[11]惠康华,杨卫,刘浩翰,等.基于YOLOv5的增强多尺度目标检测方法[J].兵工学报,2023,44(9):2600-2610.
HUI Kanghua,YANG Wei,LIU Haohan,et al.Enhanced multi-scale target detection method based on YOLOv5[J].Acta Armamentarii,2023,44(9):2600-2610.
[12]YOU K S,LIU H Z.Feature detection of mineral zoning in spiral slope flow under complex conditions based on improved YOLOv5 algorithm[J].Physica Scripta,2024,99(1):016001.
[13]周宏平,金寿祥,周磊,等.基于迁移学习与YOLOv8n的田间油茶果分类识别[J].农业工程学报,2023,39(20):159-166.
ZHOU Hongping,JIN Shouxiang,ZHOU Lei,et al.Classification and recognition of Camellia oleifera fruit in the field based on transfer learning and YOLOv8n[J].Transactions of the Chinese Society of Agricultural Engineering,2023,39(20):159-166.
[14]王玲敏,段军,辛立伟.引入注意力机制的YOLOv5安全帽佩戴检测方法[J].计算机工程与应用,2022,58(9):303-312.
WANG Lingmin,DUAN Jun,XIN Liwei.YOLOv5 helmet wear detection method with introduction of attention mechanism[J].Computer Engineering and Applications,2022,58(9):303-312.
[15]乔琛,韩梦瑶,高苇,等.基于Faster-NAM-YOLO的黄瓜霜霉病菌孢子检测[J].农业机械学报,2023,54(12):288-299.
QIAO Chen,HAN Mengyao,GAO Wei,et al.Quantitative detection of cucumber downy mildew spores at multi-scale based on Faster-NAM-YOLO[J].Transactions of the Chinese Society for Agricultural Machinery,2023,54(12):288-299.
[16]张勇进,徐健,张明星.面向轻量化的改进YOLOv7棉杂检测算法[J].计算机应用,2024,44(7):2271-2278.
ZHANG Yongjin,XU Jian,ZHANG Mingxing.Lightweight algorithm for impurity detection in raw cotton based on improved YOLOv7[J].Journal of Computer Applications,2024,44(7):2271-2278.
[17]汤文权,陈灼廷,王东桥,等.基于改进YOLOv5的皮蛋裂纹在线检测方法[J].农业机械学报,2024,55(2):384-392.
TANG Wenquan,CHEN Zhuoting,WANG Dongqiao,et al.Crack detection method for preserved eggs based on improved YOLOv5 for online inspection[J].Transactions of the Chinese Society for Agricultural Machinery,2024,55(2):384-392.