农业信息采集机器人关键技术研究现状与发展趋势
2024-09-26 00:00:00漆海霞杨泽康陈宇冯发生
江苏农业学报 2024年7期






摘要:智慧农业是农业现代化的标志,农业信息采集是智慧农业的重要环节之一,相较于人工信息采集具有的低效、准确度不高等不足,利用农业信息采集机器人代替人工进行农情信息采集,可降低农作强度、提升生产效率。本文针对不同场景下的农业信息采集机器人,概括了近几十年国内外农业信息采集机器人的应用现状,总结了自主导航技术、机器视觉技术、智能控制技术、智能云处理技术四大关键技术的研究现状,并结合农业生产中环境非结构化、作业对象具有娇嫩性等特点,指出了目前关键技术存在的问题,并提出复合导航技术、多机智能感知、视觉监测算法优化、通用化智能控制、智能云管控平台是未来的发展趋势。
关键词:农业信息采集机器人;自主导航;机器视觉;智能控制;智能云处理
中图分类号:S237文献标识码:A文章编号:1000-4440(2024)07-1351-10Research status and development trend of key technologies of agricultural information acquisition robotQI Haixia,YANG Zekang,CHEN Yu,FENG Fasheng
(College of Engineering, South China Agricultural University, Guangzhou 510642, China)
Abstract:Smart agriculture is the symbol of agricultural modernization, and agricultural information collection is one of the important links of smart agriculture. Compared with inefficient and inaccurate manual information collection, the use of agricultural information collection robots for agricultural information collection can reduce agricultural intensity and improve production efficiency. Aiming at agricultural information acquisition robots under different scenarios, this paper summarized the application status of agricultural information acquisition robots at home and abroad in recent decades, and summarized the research status of four key technologies, namely autonomous navigation, machine vision, intelligent control and intelligent cloud processing. Based on the characteristics of unstructured environment and delicate operation objects in agricultural production, the paper pointed out the problems existing in the current key technologies, and put forward that composite navigation technology, multi-intelligence sensing, visual monitoring algorithm optimization, universal intelligent control, intelligent cloud management and control platform were the future development trends.
Key words:agricultural information acquisition robot;autonomous navigation;machine vision;intelligent control;intelligent cloud processing
农业是人类生活的根基,农业生产不仅会直接影响人类的生存状况,也是推动社会进步与维持社会稳定的基石。农业生产大体可按社会发展阶段分为4个阶段[1]:第1个阶段是农业社会时期,该阶段以人力、畜力为主完成传统的农业生产;第2个阶段是工业社会阶段,该阶段以农业机械化为主,通过使用农机具完成农业生产;第3个阶段是信息化社会阶段,该阶段逐步开始使用自动化机器进行农业生产;第4个阶段是智慧社会阶段,该阶段以无人化生产为主,实现智慧农业生产。
智慧农业是现代农业的主要表现形式,主要通过物联网、大数据、人工智能等现代信息技术与农机装备的相互融合,实现农业生产中的智能农情信息感知、智能控制、智能决策,农业信息化发展是智慧农业的基础,农业信息采集是智慧农业的前提[2-5]。在农业生产中,传统农情信息采集仍通过人工,不能高效完成信息采集任务。因此,发展农业信息采集机器人、提高信息采集的质量与速度,是发展智慧农业的重要途径[6]。
当今,农业信息采集机器人主要针对农业生产作业对象信息(生长情况、病虫害、表型等)和环境信息(土壤pH值、气象、温度等)进行数据采集和判断。本文拟根据农业信息采集机器人不同的应用场景,从田间、果园、设施农业、畜禽养殖、水产养殖5个方面进行阐述,并对其研究现状进行分析,探讨农业信息采集机器人应用的关键技术,分析这些技术的发展对农业信息采集机器人的识别准确率、稳定性产生的影响,并对农业信息采集机器人的发展趋势进行展望,以期为中国农业信息采集机器人的发展提供参考。
1农业信息采集机器人技术发展现状
农业机器人技术可以追溯到1951年,主要是美国人进行机器人机械部分的研究,1984年日本近腾直首次将机器人运用在农业中[7]。在农情信息采集方面,农业信息采集机器人的应用主要是为了提高生产产量,保护动植物免受病虫害和环境因素的影响。20世纪90年代开始,国外已通过传感器、摄像头进行土壤、杂草、温度等信息的采集[8]。进入21世纪,机器人技术和信息技术水平不断提升,通过对农业机器人搭载传感器和摄像头,实现了机器人自主的信息采集,并逐渐形成了如今的农业信息采集机器人。
1.1田间信息采集机器人
田间信息采集机器人用于采集作物生长情况、田间杂草检测、土壤含水量等数据检测。日本Iida等[9]研制出了1款六足杂草识别机器人,该机器人能实现田间自由行走,并能利用微型计算机、红外测距传感器、CO2气体模块和风向仪等组成的装置,对大田土壤含水量、肥量和作物生长情况进行采集,用相机对地面进行扫描,实现对杂草的判别。丹麦Bak等[10]研发的田间杂草检测农业机器人(图1),由移动机构、摄像机、推进平台及控制系统组成,用于行距为0.25~0.50 m的农田杂草检测。日本的Nagasaka等[11]研发了一款名叫“看门犬”的机器人(图2),配备了1个摄像头和1个全球定位系统(GPS)接收器,该机器人能够找出田间的病害植株和杂草。
国内最早研制农业信息采集机器人的是胡娜[12],他们研制了四轮并联悬架的本体结构,通过遥控行走,对田间地形环境有较强的适应能力,且机器人运动灵活,有较好的稳定性。通过摄像头进行信息采集,并将采集的信息用分析软件进行信息保存与分析。刘成龙等[13]设计了1款小型四足柔性信息采集机器人,为避免机器人将田间土壤压实,采用三段式两自由度的腿部结构、远程绳索驱动式膝关节和弹簧储能装置等,将足端轨迹曲线设计为斜线式,提高了其运动速度并减少了能耗,并通过试验发现,该机器人符合田间信息采集工作的要求。
1.2果园信息采集机器人
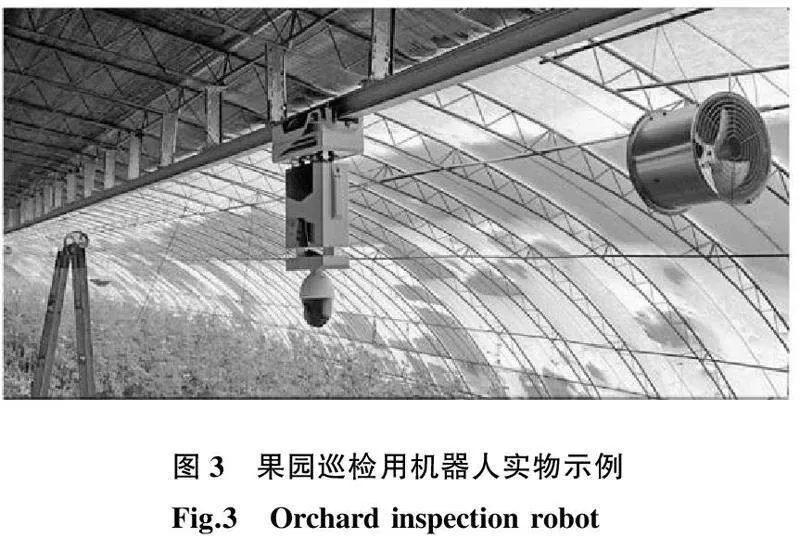
果园信息采集机器人主要完成对果园图像的自动采集,并对相关环境信息进行提取和上报。在现代农业中,为了提高生产效率,用无人机和地面机器人协同进行农情采集,并在此基础上研发地空两用信息采集机器人作为新的研究方向。He等[14]综述了用机器人、遥感技术对果园产量进行预测的过程,肯定了遥感技术利用光谱相机采集的植被指数对于提高果园预测率的重要性,并指出未来可通过多传感器信息采集技术与园艺技术的交融来实现果园智能化。Anastasiou等[15]用卫星影像、近端遥感对葡萄进行种植到收获阶段植被指数的采集,并对采集的数据进行归一化植被指数(NDVI)和绿色归一化植被指数(GNDVI)计算。通过对比得出,近地端遥感对于葡萄生产信息的识别效果更好。王伟等[16]设计出1款地空两用信息采集机器人,该机器人可同时进行空中作业与地面作业,其基本结构由飞行控制机构、地面行走机构和信息采集系统3个部分构成,在原有地面机器人的基础上加装飞行机构,提升了其在大田工作的越障能力。陈成坤[17]设计了地空多级协同作业的信息采集平台,通过在无人机、无人车上搭载双目相机进行果园信息的采集,并通过Node.js、Express.js技术设计的云平台,实现了多机协同作业,实现了各类机器人的信息共享。笔者所在团队之前针对温室作物研发了一款行车式相机电驱平台和一款履带式全地形农业作物信息监测移动平台[18-19]。安徽益可达智能科技有限公司研发的巡检机器人(图3),可将农业生产环节中的空气温湿度、土壤温度、土壤水分含量等数据上传至云端,将最优解反馈给控制系统,并可进行喷灌加温、换气、遮阳、补充CO2等操作。
1.3设施农业信息采集机器人
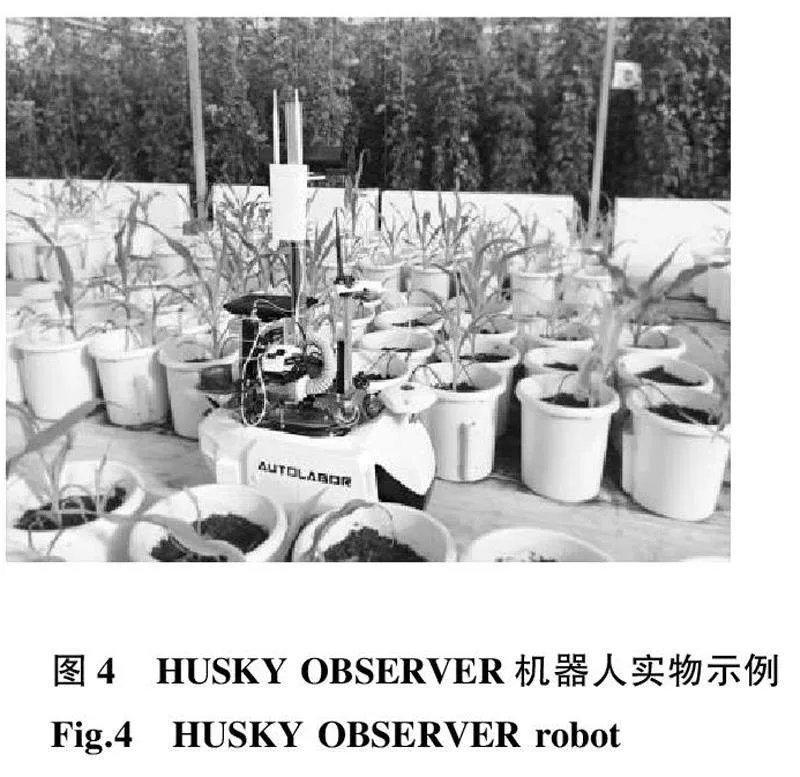
在设施农作物生长过程中,需要监测作物生长信息,可利用机器人获取作物形状、大小、颜色等状态信息。Clearpath公司研发了一款名为HUSKY OBSERVER的机器人(图4),该机器人具有自主移动和导航功能,可通过互联网对其进行实时操控,并搭载云台热成像摄像头,能远程精准监测作物的生长情况。荷兰Phenospex公司研发的“PlantEye”用无人移动车辆或龙门架等移动设备搭载三维(3D)视觉与多光谱成像设备,在温室、实验室等场景中采集叶倾角、叶面积指数、光穿透深度等17种参数。中国科学院研发了国内首套高通量信息采集监测平台Crop3D,搭载了高清相机、热成像仪、高光谱成像仪等传感器,能通量化、全面化监测植物的表型数据[20]。北京魔山科技有限公司研发了高通量植物表型采集机器人(图5),该机器人以轮式机器人Autolabor PM1为本体,搭载了激光雷达、超声波、视觉传感器等多种传感器,将多传感器信息进行融合,实现了机器人在农业环境下的高稳定性运动与数据采集处理。在机器人上可扩展设备安装面,可按需安装激光雷达、深度相机、红外相机、光谱相机、机械臂等传感器设备,实现对植物表型和环境数据的监测与采集。王旭等[21]设计了无线传感系统的设施农业信息监测移动机器人,其在移动过程中通过传感器对温室的温湿度、光照度及CO2等参数进行动态监测,并通过无线通信模块传输数据到远程客户端,还可以手机作为控制端,控制机器人的行动路径、方向和速度。
1.4畜禽养殖信息采集机器人
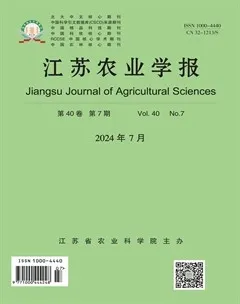
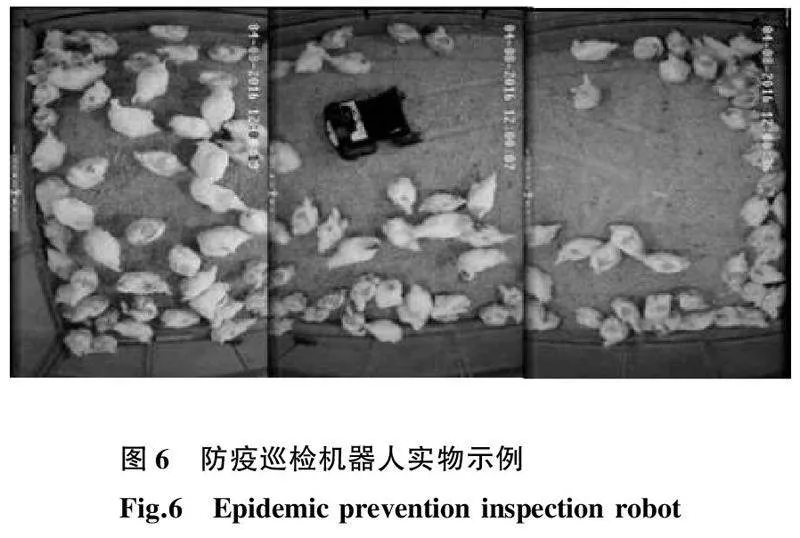
畜禽养殖信息采集机器人主要用于养殖环境及动物行为的巡检。冯青春等[22]研发了一种畜禽防疫巡检机器人(图6),包括移动承载平台、防疫喷雾部件、环境监测传感器及控制器等部分,可通过机载摄像机和传感器实时探测室内不同位置的环境信息,为人工管理作业提供决策依据。刘艳昌等[23]设计了一种轨道式机器人,能够对生猪健康进行智能监控,该机器人以现场可编程门阵列(FPGA)控制器为硬件核心,结合猪体表面特征与环境感知传感器、智能控制技术、图像处理技术,构建了生猪监测平台,实现了对生猪异常行为和环境参数信息的采集,识别率可达93.5%。连京华等[24]设计了家禽智能巡检机器人,通过监测系统上报异常情况并预警,防范了各种风险。笔者所在团队于2016年设计了一套关于猪舍信息采集的畜牧养殖守卫(LBG)自主移动机器人,搭载温度、相对湿度和灰尘传感器,能够实时监测畜禽舍内环境,通过比较里程计航迹推算(ODR)、里程表和陀螺仪航迹推算(OGDR)和卡尔曼滤波融合算法(KFDF),得出KFDF能更好地提高舍内定位精度及机器人的工作效率[25]。Usher等[26]设计了一种家禽信息采集机器人(图7),通过SuperDroidRobots底盘搭载Kinect 3D摄像头,用于采集鸡舍中的环境信息,在采集鸡蛋的试验中,共完成83次测试,采集成功率达到91.57%。
1.5水产养殖信息采集机器人
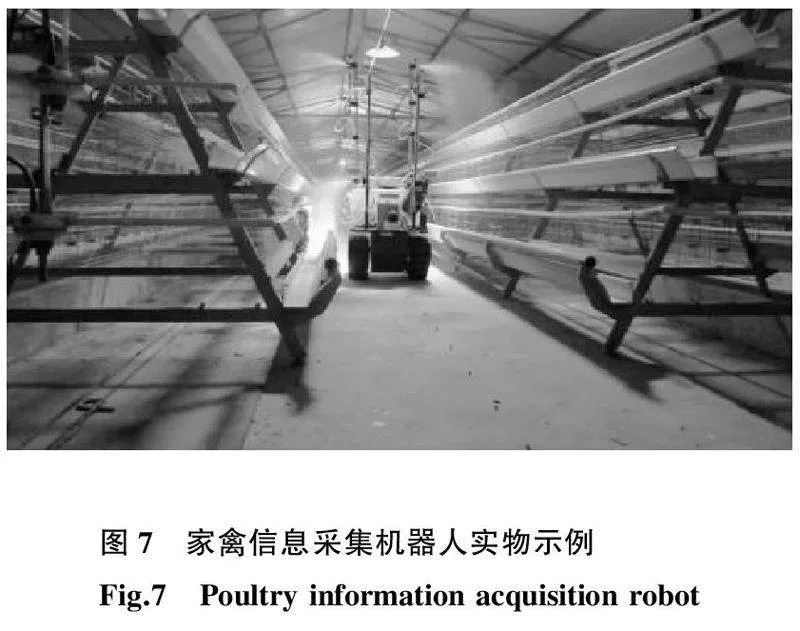
水产养殖信息采集机器人主要通过将声呐、溶解氧含量等传感器搭载到机器人上,实现对网箱内环境与作业对象的信息采集[27]。Karimanzira等[28]设计了1款水下监测机器人,通过磁感应原理测量光学指标、电导率并以此来测量氧气含量,同时搭配发光二极管(LED)摄像头,可对网箱内水质和鱼类行为进行自动监测与分析。Sakamoto等[29]用中分辨率成像光谱仪(MODIS)的时序影像遥感方法,对越南部分虾类养殖的发展状况进行了研究,从宏观角度阐述了区域养殖系统随时间、空间的分布与变化。深圳潜行创新科技有限公司研发了一款名为“潜鲛”的水下机器人(图8),这类机器人可根据自身需求搭载定距声呐、多参数水质传感器、激光卡尺等传感器,通过遥感观察环境和鱼层分布,具有实时记录数据、共享数据的功能。
2农业信息采集机器人关键技术
2.1自主导航技术
2.1.1导航定位技术自主导航是让机器人在无人操作的情况下通过传感器检测周围环境信息并确定自身姿态与位置,以按照预定的路径规划行走[30]。目前主流的导航定位技术包括卫星导航、视觉导航、激光导航、超声波导航等[31]。表1为如今主流导航技术的原理及优缺点。
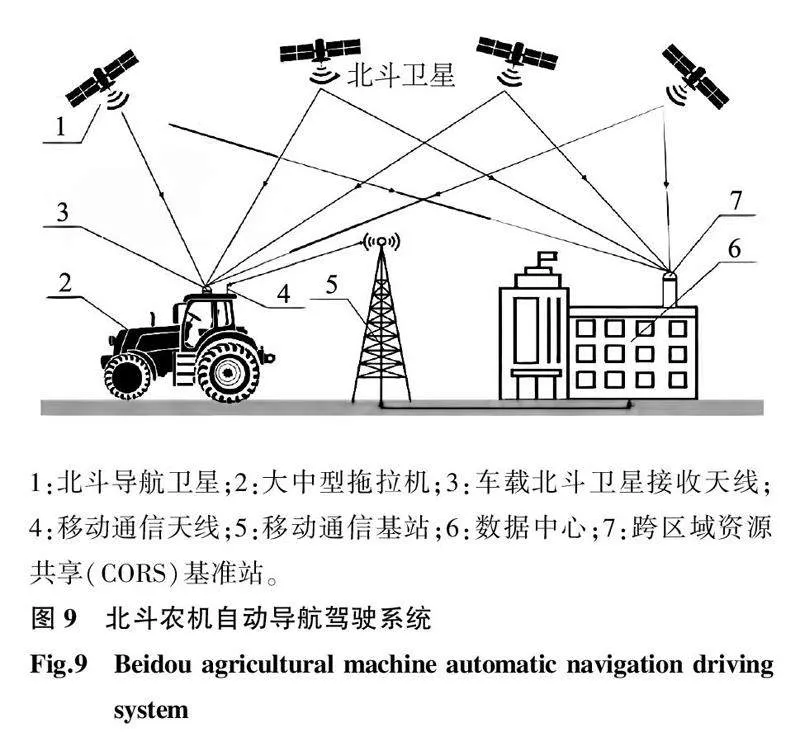
全球导航定位系统(GNSS)泛指所有全球导航卫星系统,包含美国的GPS、中国的北斗(BDS)、欧洲的伽利略(Galileo)与俄罗斯的格洛纳斯(GLONASS)[32]。而目前常用的农业信息采集机器人导航技术以GPS、北斗和视觉导航为主,因此本研究主要介绍GPS、北斗和视觉导航技术的研究现状。在导航定位技术的应用中,GPS导航常采用伪距差分动态定位法,用基准接收机、动态接收机共同观测4颗GPS卫星,通过计算求出某时刻机器人的三维坐标。当前GPS导航技术相对成熟、成本较低,应用在农业生产中可提高农机效率,提升工作质量。但是,由于农业生产受到非结构性环境的影响,因此GPS导航技术的稳定性有待提高。目前中国大力开展北斗导航(图9)在农业中的应用研究,其定位精度达到厘米级,使机器人在作业时可根据需求规划采集路线,导航控制器对车载卫星接收天线收到的差分数据进行联合解算,最后根据车身搭载的传感器进行信息采集,并实时向控制机构发送控制指令[33]。
Zhang等[34]设计的果园信息采集机器人Bin-dog(图10)利用GPS、激光扫描仪等传感器,能在果树间进行直线巡航作业及自动转向,直线追踪的横向误差不超2 cm,航向偏差不超过1.5°。陈黎卿等[35]设计了一套配备双天线的实时动态差分全球导航卫星系统(RTK-GNSS)的辅助驾驶系统,该系统基于预瞄算法、二自由度车辆转向模型,以0.5 m/s的速度分别在水泥路面、玉米田间环境下进行了试验,试验结果表明,辅助驾驶系统在2种条件下的直线路径跟踪偏差均值和标准差分别为5.2 cm、3.4 cm和6.8 cm、4.8 cm,表明所设计的辅助驾驶系统在宽行种植作物中有良好的应用价值。刘阳春等[36]为实现农业机器人松土作业的质量监控,基于北斗导航、互联网技术研发了一款远程监控管理系统,该系统可在线实时获取作业面积和工况,实现远程监控。王诚龙等[37]设计了一款在线监测终端,用北斗导航确定位置信息,对农业机器人播种、施肥等过程进行监测,并在终端开发了应用程序(APP),为实现精准农业提供了保证。
近些年来,基于人工智能与图像处理技术的发展,视觉导航技术得以完善。视觉导航通过视觉传感器获取周围环境信息,对图像信息进行处理并规划导航线路,最终让机器人在无人干扰的情况下按照规划路线移动到目标处[38]。相较于GNSS导航,视觉导航的实时性和灵活性更胜一筹,但大量的采集数据需要较高的信息计算能力,并受到农业生产中环境复杂程度的影响,因此精度较差。2020年,视觉导航的研究进展主要体现在算法优化方面,算法的优化可提高视觉导航的精度,并提高在未知环境中的导航成功率,从而增强视觉导航的自主性[39]。Choi等[40]基于水稻秧苗在生长过程中其叶片、分枝等围绕主茎进行生长的特点,提出了一种新的导航线路提取算法,该方法对不同生长周期的秧苗具有较好识别效果,解决了秧苗生长过程中叶片交叉遮挡的问题。张翔淼[41]为解决机器人在农业生产中因光照度低、分布不均匀所导致的同步性与适应性较差的问题,提出了基于YCrCb(Y代表亮度、Cr与Cb分别代表红色和蓝色色差)颜色空间的图像预处理算法、超像素低头基准线监测算法和垂直投影特征点搜索与校正算法,提高了视觉导航的精度和适应性。
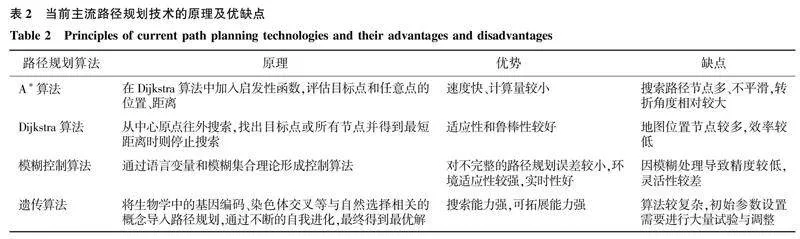
2.1.2路径规划路径规划是指在机器人运动的过程中,根据特定的性能指标,通过搜索来找到一条最优或次优的路径,以实现从起始状态到目标状态的移动[42]。路径规划技术包括全局路径规划和局部路径规划,其中全局路径规划通过掌握的所有环境信息和地图环境进行路径规划,包括Dijkstra算法[43]、A*算法[44]、概率路图法[45]、快速扩展随机数法[46]、栅格法[47]、拓扑法[48]和自由空间法[49]。局部路径规划通过机器搭载的传感器来掌握周围的环境,以此来确定自身所在地图的位置及周围的障碍分布,并实时计算从当前节点到某一子目标节点的最优路径,其算法有人工势场法[50]、动态窗口法[51]、模糊控制法[52]、遗传算法[53]及神经网络法。在当前的农业生产中,存在规划路线重复或遗漏的问题。因此,发展高质量的路径规划能够减少机器人的运行时间,降低成本与损耗。表2为当前主流路径规划技术的原理及优缺点。
近几年来,研究者将重点放在改进型算法和混合型算法模型上。殷建军等[54]提出了一种基于改进启发式搜索的能量约束A*(ECA*)路径规划算法, 该算法可以在资源受限的情况下完成最优能量损耗路径的规划,通过在ECA*算法中添加相应的能量约束,设计了ECA*算法与传统的A*算法搜索路径能量损耗仿真试验,结果表明, 改进算法的能量损耗降低了14.87%。2019年,赵辉等[55]提出一种基于天牛须搜索(BAS)算法和A*算法相结合的BASA*全局规划算法,该算法在天牛须搜索算法的基础上适当调整步长,并对路径进行优化,基于A*算法采用曼哈顿距离作为启发函数进行全局规划,最后采用贝塞尔曲线对路径进行圆滑处理,优化后的算法缩短了路径长度,减少了转折点数量。
2.2机器视觉技术
机器视觉技术通过机器人搭载摄像头并用软件从图像中提取各类信息,其优点是精度高、效率高、灵活性强,缺点是系统较为复杂,对非结构性作物的识别成功率有待提高,对动态物体的识别能力较差。在农业生产中,机器视觉的主要应用领域包括作物识别、杂草与虫害监测、作物生长监测与产量预估[56]。
2.2.1作物识别机器视觉技术中的作物识别即机器人通过视觉识别系统精准识别作物,从而获取作物的表型信息,如颜色、大小和形状等。传统的视觉识别只是通过特征来区分目标,受到神经网络的启发,加上近些年来人工神经网络与深度学习的快速发展,近年来,科研人员凭借神经网络的强大特征处理能力,在作物识别方面已经逐步解决光照、外物遮挡、振动、作物重叠粘连等问题[57]。
Fu等[58]针对猕猴桃的识别提出了一种基于深度卷积的猕猴桃田间图像检测系统,该系统从不同光照度条件下拍摄的图像中提取出2 100张784×784像素的子图像用来训练模型和验证样本。接着利用Zeiler、Fergus卷积神经网络(ZFNet)的反向传播、随机梯度下降处理,得到1个Faster R-CNN模型。经试验,发现基于此模型的猕猴桃快速检测仪的平均检测准确率为89.3%,被遮挡果实、重叠果实、相邻果实、分离果实的识别率分别为82.5%、85.6%、94.3%、96.7%。2021年,李寒等[59]提出了一种番茄果实识别与定位方法,该方法将红绿蓝深度信息(RGB-D)图像与K-means优化的自组织映射神经网络相结合,共采集了366个番茄样本的80幅图像,正确识别率为87.2%,定位结果的均方根误差为1.66 mm。
2.2.2杂草与虫害监测杂草和病虫害监测是防治植物病虫害的前提,近些年来,随着深度学习等技术的不断发展,杂草和病虫害的识别更快捷、方便,且精度更高。此项技术应用在高价值农作物上,能够带来较大的经济增收[60]。
Picon等[61]在2019年将卷积神经网络应用于多作物病虫害的分类,用到超过105张图像的数据集,包含5种作物的17种病虫害情况,并提出了1种扩展卷积神经网络(CNN)架构,该架构的优势在于让卷积神经网络对图像数据进行集中学习,降低了疾病分类任务的复杂性。经试验发现,该架构的平均精度为98%。Kao等[62]用卷积自动编码器(CAE)进行番茄成熟度的检测,发现其对番茄成熟度的识别准确率达到了100%。陈晶等[63]将机器视觉技术应用到茶小绿叶蝉的自动识别领域,用改进的SMOTE算法、KS算法对茶小绿叶蝉进行自动识别,结果表明,该算法的整体识别精度可达到99.03%,对茶小绿叶蝉的查准率可达91.76%,与其他传统算法相比提高了对茶小绿叶蝉的识别精度。
2.2.3作物生长监测与产量预估作物生长监测数据是预估产量的重要信息。生长监测分为人工监测、遥感监测和机器视觉监测[64],现代农业以遥感和机器视觉技术进行单一监测或协同检测,能够提高生产效率。
樊艳英等[65]研制了玉米长势监测分析系统,该系统通过视频传感器、光谱传感器、4G通信模块等传感通信设备对玉米的长势进行数据采集并进行数据上传。通过对人工采集和系统采集的数据进行对比试验,证明该系统能正确识别玉米植株高度,并能进行全区域监控,保证玉米的良好生长。冯文斌[66]用无人机搭载光谱相机监测夏玉米4个生育期的长势变化,通过变异系数法搭建4个生育期的监测模型,通过比较产量数据得出,BP神经网络用于综合生长监测有较好的效果,在产量预估上,用4种植被指数的拟合模型能精准得到预估产量。贾彪[67]通过集成感光耦合组件(CCD)相机将棉花监测技术、图像识别技术、信息通信技术等其他信息化技术融为一体,构建了远程控制监测平台,能够高效监测与判断棉花的长势与营养状况。Nguyen等[68]为解决因遮光影响果实识别定位的问题,用RGB-D相机进行图像采集,并基于色彩、大小研发了一种单色、双色监测算法,经试验证明,该算法对被遮盖果实的识别率为82%,位置误差均在10 mm以内,能有效用于果园监测与产量预估。
2.3智能控制技术
智能控制技术通过人工智能、结构设计、控制理论等技术,实现机器人多个子系统的协同工作,无需人工干预即可完成目标控制。通过研制开源操作系统、通用控制器和作业决策通用组件,可以实现高性能农业信息采集机器人的快速开发[69]。
Shamshiri等[70]主要介绍了虚拟机器人试验平台(V-REP)开源仿真模拟器,在该模拟器中可快速创建试验平台,在试验平台中能开发、测试和验证控制策略和算法。Grimstad等[71]研发了一款模块化机器人Thorvald Ⅱ,通过组装开发成模块化小麦表型机器人(图11),该机器人的硬件部分包括驱动模块、悬架模块、传感器模块等,软件部分选择机器人操作系统(ROS)。通过软硬件的模块化设计,该机器人可通过简单的重新组装实现不同场景下的工作需求。此外,通过修改该机器人的部分软件尺寸、驱动类型参数可实现机器人的自主控制作业。Coleman等[72]设计了一款名为开放杂草定位器(OWL)的杂草检测装置,通过超绿值、归一化超绿值、色调饱和度以及超绿值与色调饱和度结合算法开发了一个开源、低成本、可用于大规模杂草检测的系统,平均检测准确率为79%,推动了社区农业的发展。张强[73]设计了一款大棚作业多功能农业机器人,该机器人以履带底盘搭载模块化末端机构实现耕地、播种等功能,并以单片机、姿态传感器和无线传输等控制传输模块实现远程控制与通信。未来,可在机器人上加装摄像头并优化末端机构,以提高信息采集工作的效率,为深入研究提供新的方向。
2.4智能云处理技术
智慧农业已经成为当今农业发展的主流,主要采用4G/5G、物联网、大数据和人工智能等新一代信息技术远程监测和控制机器人,使其实现自主监测和自主作业,并实现各个生产环节的智能化[74]。无人农场、植物工厂、无人渔场等是智慧农业的高级形式。Pavón-Pulido等[75]设计了1个精准农业(PA)系统,该系统包括固定节点和1个无线传感器网络(WSN),通过智能设备对作物进行监测。Kajol等[76]提出了1个基于物联网的自动化农业田间分析和监测(AAFAMS)系统,该系统通过监测和检索SQLite数据库中的数据,反馈给用户病虫害、水分含量等信息。在罗锡文等[2]的研究中,花生无人农场2021年的产量为3 164.10 kg/hm2,高于广东省当地平均产量(2 400.00 kg/hm2),已实现农场耕种管收、作物生产实时监控等生产过程全无人。刘凯[77]基于“云-边-端”研发了一款果园信息监测平台,通过改进的SK-YOLOv5算法配合信息监测网站,实现了对果实的数量检测、病虫害监测、数据云存放等功能。
3存在的问题与发展趋势
随着国内外对农业信息采集机器人研究的深入,虽然从理论到应用已有许多成果,但是受到作业环境复杂、成本较高、智能化程度低等问题的影响,目前未能实现大规模应用。结合国内外农业信息采集机器人最新研究进展和思路,对现存问题和未来研究方向进行总结。
3.1复合导航技术
在自动导航定位和路径规划技术上,受农业生产环境复杂性的影响,有不小的局限性。例如在导航定位中,视觉导航在非结构性的工作环境中的精度较差,激光导航避障能力较差。在路径规划中,无论是A*算法还是模糊控制法等,都有路径节点多、无法定义控制目标等问题。因此,为提高导航精度,实现自主导航、发展多传感器复合导航、实现技术互补等是解决上述问题的主要方法。
3.2多机智能感知
现阶段的农业信息采集方法较为单一,工作效率较低。随着农业机器人、水下机器人、无人机和互联网等技术的不断发展,从陆地、海洋和空中3个不同维度,通过巡检、遥感等多种方法对农业生产进行信息采集,实现立体农情信息采集,是未来的一个重要发展趋势。
3.3视觉监测算法优化
农业信息采集机器人是生产过程中的“眼睛”,由于作业对象差异性较大,会影响识别效率,因此现阶段的识别与监测更多的是对静态、单一变量情况进行采集。而在农业生产中,存在雨水、大雾、光照变化等动态因素。因此,为了提高自然环境下视觉识别的成功率,优化深度学习识别算法并提高复杂算法的实时性是未来研究的重点。
3.4通用化智能控制
在应用方面,农业信息采集机器人仍面临成本较高、稳定性较低、未规模化生产等问题。未来研究的重点为设计并制造安全稳定、操作简便的农业信息采集机器人,以提高推广率,在结构上研究低成本模块化设计,通过更换传感器模块和搭载不同摄像设备来实现在不同场景中的使用。此外,可以在软件上设计开源系统,实现系统的迅速开发,以降低用户的成本。
3.5智能云管控平台
随着5G、物联网、大数据、云处理等技术的不断发展,机器人能够自主学习和深度学习,并能对农作物信息进行自动提取、自主判断,从而实现农业生产的智能化、无人化。因此,让操作系统集成化、简易化,同时搭建多机协作的云管控平台是接下来的关键研究内容。
参考文献:
[1]罗锡文,廖娟,臧英,等. 我国农业生产的发展方向:从机械化到智慧化[J]. 中国工程科学,2022,24(1):46-54.
[2]罗锡文,廖娟,胡炼,等. 我国智能农机的研究进展与无人农场的实践[J]. 华南农业大学学报,2021,42(6):8-17,5.
[3]赵春江. 智慧农业的发展现状与未来展望[J]. 华南农业大学学报,2021,42(6):1-7.
[4]赵春江. 智慧农业发展现状及战略目标研究[J]. 农业工程技术,2019,39(6):14-17.
[5]罗锡文,廖娟,邹湘军,等. 信息技术提升农业机械化水平[J]. 农业工程学报,2016,32(20):1-14.
[6]张刚. 农业信息采集机器人结构及控制系统设计[D]. 哈尔滨:东北林业大学,2016:1-2.
[7]赵静娟,郑怀国,董瑜,等. 全球农业机器人研发趋势预测及对我国的启示[J]. 中国农机化学报,2021,42(4):157-162.
[8]GRIFT T, ZHANG Q, KONDO N, et al. A review of automation and robotics for the bio-industry[J]. Journal of Biomechatronics Engineering,2008,1(1):37-54.
[9]IIDA M, KANG D, TANIWAKI M, et al. Localization of CO2 source by a hexapod robot equipped with an anemoscope and a gas sensor[J]. Computers and Electronics in Agriculture,2008,63(1):73-80.
[10]BAK T, JAKOBSEN H. Agricultural robotic platform with four wheel steering for weed detection[J]. Biosystems Engineering,2004,87(2):125-136.
[11]NAGASAKA Y, ZHANG Q, GRIFT T E, et al. Control system design for an autonomous field watching-dog robot[C]//International Conference on Automation Technology for Off-road Equipment. Kyoto:ATOE,2004:298-304.
[12]胡娜. 农田信息采集机器人本体研制[D]. 南京:南京林业大学,2009:9-61.
[13]刘成龙,章永年,王睿,等. 面向农情信息采集的小型四足柔性机器人设计[J]. 机械设计,2017,34(12):15-19.
[14]HE L L, FANG W T, ZHAO G N, et al. Fruit yield prediction and estimation in orchards: a state-of-the-art comprehensive review for both direct and indirect methods[J]. Computers and Electronics in Agriculture,2022,195:106812.
[15]ANASTASIOU E, BALAFOUTIS A, DARRA N, et al. Satellite and proximal sensing to estimate the yield and quality of table grapes[J]. Agriculture,2018,8(7):1-15.
[16]王伟,李超艺,刘九庆,等. 地空两用农业信息采集机器人行走机构仿真[J]. 农机化研究,2019,41(6):26-31.
[17]陈成坤. 空-地协同环境下果园信息共享平台设计与实现[D]. 杨凌:西北农林科技大学,2021.
[18]许俊云,漆海霞,黎鉴文,等.温室作物生长信息检测相机的电驱平台设计[J].农机化研究,2023,45(9):54-59.
[19]漆海霞,陈宇,周子森,等.全地形农业作物信息监测移动平台及监测方法:CN115384643B[P]. 2023-11-28.
[20]郭庆华,吴芳芳,庞树鑫,等. Crop 3D—基于激光雷达技术的作物高通量三维表型测量平台[J]. 中国科学:生命科学,2016,46(10):1210-1221.
[21]王旭,敬濯瑄,姚园园,等. 无线传感系统的设施农业移动机器人监测系统设计[J]. 电子制作,2022,30(13):25-26,40.
[22]冯青春,王秀,邱权,等. 畜禽舍防疫消毒机器人设计与试验[J]. 智慧农业(中英文),2020,2(4):79-88.
[23]刘艳昌,赵海生,李泽旭,等. 基于机器人的生猪健康养殖智能监控系统设计[KeK/9ZIQrXAtAl6scoJT4w==J]. 中国农机化学报,2021,42(8):187-195.
[24]连京华,李惠敏,祝伟,等. 家禽生产智能巡检机器人的设计[J]. 中国家禽,2019,41(18):72-75.
[25]QI H X, THOMAS M B, ZHANG Z G, et al. Preliminary laboratory test on navigation accuracy of an autonomous robot for measuring air quality in livestock buildings[J]. International Journal of Agricultural and Biological Engineering,2016,9(2):29-39.
[26]USHER C T, DALEY W D, JOFFE B P, et al. Robotics for poultry house management[C]. Washington: American Society of Agricultural and Biological Engineers,2017:1.
[27]李道亮,包建华. 水产养殖水下作业机器人关键技术研究进展[J]. 农业工程学报,2018,34(16):1-9.
[28]KARIMANZIRA D, JACOBI M, PFTZENREUTER T, et al. First testing of an AUV mission planning and guidance system for water quality monitoring and fish behavior observation in net cage fish farming[J]. Information Processing in Agriculture,2014,1(2):131-140.
[29]SAKAMOTO T, VAN PHUNG C, KOTERA A, et al. Analysis of rapid expansion of inland aquaculture and triple rice-cropping areas in a coastal area of the Vietnamese Mekong Delta using MODIS time-series imagery[J]. Landscape and Urban Planning,2009,92(1):34-46.
[30]蒋浩. 基于RTK技术的农业机械自动导航系统研究[D]. 杭州:浙江大学,2019.
[31]姬长英,周俊. 农业机械导航技术发展分析[J]. 农业机械学报,2014,45(9):44-54.
[32]季宇虹,王让会. 全球导航定位系统GNSS的技术与应用[J]. 全球定位系统,2010,35(5):69-75.
[33]姚洋,郭承军. 北斗卫星导航系统在精准农业中的应用研究[C]. 成都:中国卫星导航系统管理办公室学术交流中心,2021:110-113.
[34]ZHANG Q, WANG Z D, JONES D, et al. Bin-dog: a robotic platform for bin management in orchards[J]. Robotics,2017,6(2):12.
[35]陈黎卿,许鸣,柏仁贵,等. 高地隙植保机辅助驾驶系统设计与试验[J]. 农业机械学报,2019,50(9):25-32.
[36]刘阳春,苑严伟,张俊宁,等. 深松作业远程管理系统设计与试验[J]. 农业机械学报,2016,47(增刊1):43-48.
[37]王诚龙,王吉旭,葛宝玉,等. 北斗农机作业全信息质量在线监测终端[C]//中国卫星导航定位协会.卫星导航定位与北斗系统应用2017——深化北斗应用开创中国导航新局面.北京:测绘出版社,2017:186-190.
[38]王家辉. 基于YOLOv3的水田除草机器人视觉导航技术研究[D]. 广州:华南理工大学,2020:2-3.
[39]杨文钰,李东兵,隋毅,等. 2020年国外不依赖卫星的导航技术发展综述[J].飞航导弹,2021(1):25-30,70.
[40]CHOI K H, HAN S K, HAN S H, et al. Morphology-based guidance line extraction for an autonomous weeding robot in paddy fields[J]. Computers and Electronics in Agriculture,2015,113:266-274.
[41]张翔淼. 复杂环境下农业机器人视觉导航技术研究[D]. 天津:天津理工大学,2022.
[42]陈浩,王光林,郝询. 移动机器人的路径规划综述与发展趋势[J]. 物流技术与应用,2020,25(10):158-160.
[43]DIJKSTRA E. A note on two problems in connexi on with graphs[J]. Numerische Mathematik,1951,1(1):269-271.
[44]熊壬浩,刘羽. A*算法的改进及并行化[J]. 计算机应用,2015,35(7):1843-1848.
[45]LADD A M, KAVRAKI L E. Measure theoretic analysis of prob-abilistic path planning[J]. Transaction on Robotics and Automation,20(2):229-242.
[46]LAVALLE S M. Planning algorithms[M]. Cambridge: Cambridge University Press,2006.
[47]姜龙腾,迟瑞娟,马悦琦,等.基于栅格法的农业机器人路径规划方法研究[J].农机化研究,2024,46(6):19-24.
[48]THRUN S. Learning metric-topological maps for indoor mobile robot navigation[J]. Artificial Intelligence,1998,99(1):21-71.
[49]BROOKS R A. Solving the find-path problem by good representation of free space[M]//COX I J, WILFONG G T. Autonomous robot vehicles. Berlin, Heidelberg: Springer-Verlag, 1983:290-297.
[50]KHATIB O. Real-time obstacle avoidance for manipulators and mobile robots[J]. The International Journal of Robotics Research,1986,5(1):90-98.
[51]陈奕梅,康雪晶,徐鹏. 复杂环境下多移动机器人控制算法研究[J]. 电光与控制,2021,28(4):48-52.
[52]李鹏,温素芳. 基于模糊控制的路径规划算法的实现[J]. 杭州电子科技大学学报,2007,27(6):82-86.
[53]徐力,刘云华,王启富. 自适应遗传算法在机器人路径规划的应用[J]. 计算机工程与应用,2020,56(18):36-41.
[54]殷建军,董文龙,梁利华,等. 复杂环境下农业机器人路径规划优化方法[J]. 农业机械学报,2019,50(5):17-22.
[55]赵辉,郝梦雅,王红君,等. 基于改进A*算法与天牛须搜索算法的农业机器人路径规划方法[J]. 科学技术与工程,2019,19(31):185-190.
[56]杨涛,李晓晓. 机器视觉技术在现代农业生产中的研究进展[J]. 中国农机化学报,2021,42(3):171-181.
[57]傅隆生,宋珍珍,王东,等. 深度学习方法在农业信息中的研究进展与应用现状[J]. 中国农业大学学报,2020,25(2):105-120.
[58]FU L S, FENG Y L, MAJEED Y, et al. Kiwifruit detection in field images using Faster R-CNN with ZFNet[J]. IFAC-PapersOnLine,2018,51(17):45-50.
[59]李寒,陶涵虓,崔立昊,等. 基于SOM-K-means算法的番茄果实识别与定位方法[J]. 农业机械学报,2021,52(1):23-29.
[60]杨涛,李晓晓. 机器视觉技术在现代农业生产中的研究进展[J]. 中国农机化学报,2021,42(3):171-181.
[61]PICON A, SEITZ M, ALVAREZ-GILA A, et al. Crop conditional convolutional neural networks for massive multi-crop plant disease classification over cell phone acquired images taken on real field conditions[J]. Computers and Electronics in Agriculture,2019,167:105093.
[62]KAO I H, HSU Y W, YANG Y Z, et al. Determination of Lycopersicon maturity using convolutional autoencoders[J]. Scientia Horticulturae,2019,256:108538.
[63]陈晶,朱启兵,黄敏,等. 基于机器视觉的茶小绿叶蝉识别方法研究[J]. 激光与光电子学进展,2018,55(1):348-355.
[64]王鹏新,田惠仁,张悦,等. 基于深度学习的作物长势监测和产量估测研究进展[J]. 农业机械学报,2022,53(2):1-14.
[65]樊艳英,张自敏,陈冠萍,等. 基于物联网的精准农业玉米长势监测分析系统研究[J]. 农机化研究,2018,40(8):223-227.
[66]冯文斌. 基于无人机多光谱遥感的夏玉米长势监测及产量估测[D]. 泰安:山东农业大学,2022.
[67]贾彪. 基于计算机视觉技术的棉花长势监测系统构建[D]. 石河子:石河子大学,2014.
[68]NGUYEN T T, VANDEVOORDE K, WOUTERS N, et al. Detection of red and bicoloured apples on tree with an RGB-D camera[J]. Biosystems Engineering,2016,146:33-44.
[69]刘成良,贡亮,苑进,等. 农业机器人关键技术研究现状与发展趋势[J]. 农业机械学报,2022,53(7):1-22,55.
[70]SHAMSHIRI R R, HAMEED I A, PITONAKOVA L, et al. Simulation software and virtual environments for acceleration of agricultural robotics:features highlights and performance comparison[J]. International Journal of Agricultural and Bioengineering,2018,11(4):1-16.
[71]GRIMSTAD L, FROM P J. The ThorvaldⅡ agricultural robotic system[J]. Robotics,2017,6(4):1-24.
[72]COLEMAN G, SALTER W, WALSH M. OpenWeedLocator (OWL): an open-source,low-cost device for fallow weed detection[J]. AgriRxiv,2022,12(1):170.
[73]张强. 大棚作业多功能农业机器人研究[D]. 武汉:湖北工业大学,2019.
[74]李道亮,李震. 无人农场系统分析与发展展望[J]. 农业机械学报,2020,51(7):1-12.
[75]PAVN-PULIDO N, LPEZ-RIQUELME J A, TORRES R, et al. New trends in precision agriculture: a novel cloud-based system for enabling data storage and agricultural task planning and automation[J]. Precision Agriculture,2017,18:1038-1068.
[76]KAJOL R, AKSHAY K K. Automated agricultural field analysis and monitoring system using IOT[J]. International Journal of Information Engineering and Electronic Business,2018,12(2):1-17.
[77]刘凯. 基于“云-边-端”的果园信息监测平台研究[D]. 长春:吉林大学,2022.(责任编辑:徐艳)