点云切片结合聚类算法的TLS单木探测方法研究
2024-09-12 00:00:00易静马开森向建平唐杰蒋馥根陈松孙华
南京林业大学学报(自然科学版) 2024年4期

摘要:【目的】针对直接使用地面激光雷达生成的冠层高度模型(canopy height model,CHM)和归一化点云(normalized point cloud,NPC)在复杂林分探测中存在单木探测能力不足的问题,研究引入点云切片结合聚类的方法以提高单木探测精度。【方法】以广西壮族自治区6个不同林分密度的人工林样地为研究对象,利用地面激光扫描获取样地的归一化点云数据,提取高度在1.3 m处的点云切片,分别采用基于密度噪声应用空间聚类(DBSCAN)和均值漂移聚类(MS)算法对切片中的树干点云进行聚类。利用野外实测调查数据进行精度验证,并与基于CHM的局部最大值算法和基于NPC的点云分割算法(point cloud segmentation,PCS)的探测结果对比,评价和分析不同探测方法的适用性与参数敏感性。【结果】所有方法均可获得良好的探测结果,各样地的最优总体探测精度得分F≥ 0.86;点云切片结合聚类算法的单木探测方法结果最优。DBSCAN算法的聚类阈值(Eps)和均值漂移算法的聚类半径可显著影响单木探测率,最大Eps取决于最大林木间距,聚类半径接近最大单木胸径时的探测结果最优。【结论】基于点云切片结合聚类算法的单木探测能提高下层林木探测率,可有效改善高密度林分的单木探测精度,为不同林分的单木探测方法选择提供参考。
关键词:地面激光扫描;单木探测;点云切片;聚类算法;林木参数提取;人工林
中图分类号:S758;TP391"""""" 文献标志码:A开放科学(资源服务)标识码(OSID):
文章编号:1000-2006(2024)04-0113-10
Research on TLS single tree detection method based on point cloud slicing combined with clustering algorithm
YI Jing1, MA Kaisen1,2, XIANG Jianping3, TANG Jie1, JIANG Fugen1, CHEN Song1, SUN Hua1
(1.Research Center of Forestry Remote Sensing amp; Information Engineering, Central South University of Forestry and Technology, Key Laboratory of Forestry Remote Sensing Based Big Data amp; Ecological Security for Hunan Province, Key Laboratory of National Forestry and Grassland Administration on Forest Resources Management and Monitoring in Southern China, Changsha 410004,China; 2. National-Local Joint Engineering Laboratory of Geo-Spatial Information Technology, Hunan University of Science amp; Technology, Xiangtan" 411201, China; 3.Lutou Experimental Forest Farm, Central South University of Forestry and Technology, Yueyang 414000, China)
Abstract: 【Objective】 To solve the problem that" a canopy height model (CHM) and normalized point cloud (NPC) directly generated by terrestrial laser scanning (TLS) are not capable of detecting individual trees in complex stands, this study introduced the method of point cloud slicing combined with clustering to improve the detection accuracy. 【Method】 In this study, six sample plots in a plantation with different stand densities in Guangxi Zhuang Autonomous Region, China, were used as the research objects. First, the NPC data of a sample plot obtained by TLS were used to extract point cloud slices at a height of 1.3 m, and then the density-based spatial clustering of applications with noise (DBSCAN) and mean shift algorithms were used to cluster the tree trunk point clouds in the slices. The accuracy was verified by the field survey data, and the detection results were compared with those of the local maximum algorithm based on a CHM, and a point cloud segmentation algorithm based on an NPC. The applicability and parameter sensitivity of the different detection methods were evaluated and analyzed. 【Result】 Satisfactory detection results were obtained by all methods, and the optimal detection accuracy F-score was ≥ 0.86 for each sample plot. The individual tree detection method using point cloud slicing combined with a clustering algorithm produced better results. The clustering threshold epsilon neighborhood (Eps) value of the DBSCAN algorithm and the clustering radius r of the mean shift algorithm significantly affected the individual tree detection rate, with the maximum Eps depending on the maximum stand spacing and optimum results when r was close to the maximum individual tree diameter at breast height. 【Conclusion】 Individual tree detection based on point cloud slicing combined with a clustering algorithm can increase the detection rate of understory trees lower forest, effectively improve the accuracy of single tree detection in dense stands, and provide a reference for the selection of single tree detection methods in different forest stands.
Keywords:terrestrial laser scanning; single tree detection; point cloud slicing; clustering algorithm; extraction of forest parameters; plantation
单木是森林的基础单元,其结构参数包括胸径和树高等,准确获取单木结构参数是森林资源调查的重要任务,对森林资源经营管理、碳储量计量和评估森林生态价值等具有重要意义[1-2]。地面激光扫描(terrestrial laser scanning,TLS)作为一种主动式遥感技术,可获取包含森林空间结构信息的林分高密度点云[3],用于实现单木位置探测和结构参数提取等[4-6],已成为森林资源调查的新方式[7]。
单木探测是从地面激光雷达林分点云中获取林木信息的基础[8]。早期的单木探测研究主要选择亚寒带和温带的森林,以地面激光雷达林分点云生成的冠层高度模型(canopy height model,CHM)和归一化点云(normalized point cloud,NPC)为数据基础,利用数学算法从全局视角开展单木探测研究。基于CHM的单木探测采用局部最大值(local maximum,LM)、分水岭、区域生长等算法,通过利用冠层的高度信息探测树顶位置,在北美的白云杉(Picea glauca)[9]和我国的白皮松(Pinus bungeana)[10]林分内均取得了良好的探测结果。但由于原始点云在插值生成CHM的过程中,会导致部分森林结构信息等的丢失[11],因此该类方法在林层结构复杂的亚热带林区中具有一定的局限性。基于NPC的方法通常利用树木点云的空间距离和结构特征,如利用点云分割算法(point cloud segmentation,PCS)和体素空间聚类算法等进行单木探测[12-14]。此类方法在稀疏的针叶混交林中具有良好适用性,可获得准确的单木探测结果,但易受林分点云中的噪点影响,且对于优势冠层下的低矮林木探测能力有限[11,15]。
针对亚热带人工林下层林分的树干点云空间结构信息,可采用点云切片结合聚类算法开展单木探测。常用的聚类算法包括K均值聚类、基于密度噪声应用空间聚类(density-based spatial clustering of applications with noise,DBSCAN)、最大最小值聚类、均值漂移聚类(mean shift,MS)等[16-17],其中,K均值聚类和最大最小值聚类需设置先验参数以确定聚类的簇数,而DBSCAN和均值漂移聚类是以点云的空间密度为基础,可对任意形状的点云簇进行聚类,更适用于林分切片点云的树干探测[18-21]。
因此,本研究以广西6个林分密度的人工林样地为对象,运用基于点云切片的DBSCAN和均值漂移聚类开展单木探测,并与基于CHM的局部最大值算法和基于归一化点云的PCS算法的探测结果对比,分析不同方法的适用性与参数敏感性。以各样地的最优探测结果为基础,提取单木胸径和树高参数,以期解决高密度林分的单木探测精度低的问题,同时为不同林分的单木探测方法选择提供参考。
1 材料与方法
1.1 研究区概况
广西壮族自治区地处云贵高原东南边缘(104°28′~112°04′E, 20°54′~26°23′N),属亚热带季风气候和热带季风气候区,各地年平均气温17.6~23.8 ℃,年降水量723.9~2 983.8 mm,年日照时间1 231~2 209 h,雨水丰沛,光照充足,植物可以全年生长。广西是全国人工林面积最大的省份,人工林面积约7.34万hm2,主要树种为桉树(Eucalyptus robusta)和杉木(Cunninghamia lanceolata),分别占人工林面积的34.9%和20.4%。
1.2 数据获取与处理
1.2.1 样地实测数据
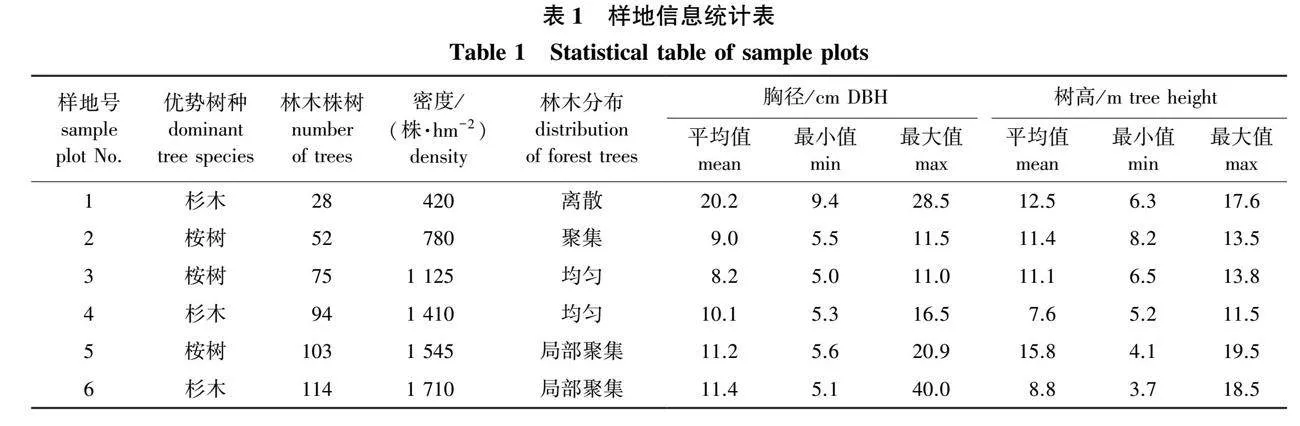
于2020年11月对6个林分密度的人工林样地进行地面调查,样地位于桂林市、防城港市、来宾市和柳州市。样地大小为25.82 m×25.82 m,林分密度为420~1 710株/hm2,依据林木的分布情况分为均匀分布、聚集分布、局部聚集分布、离散分布4种类型。利用实时动态差分定位技术(real-time kinematic,RTK)对样地边界和树木进行定位,记录胸径为5 cm及以上的单木的胸径(diameter at breast height,DBH)和树高等参数。样地调查情况如表1。
1.2.2 TLS数据获取及预处理
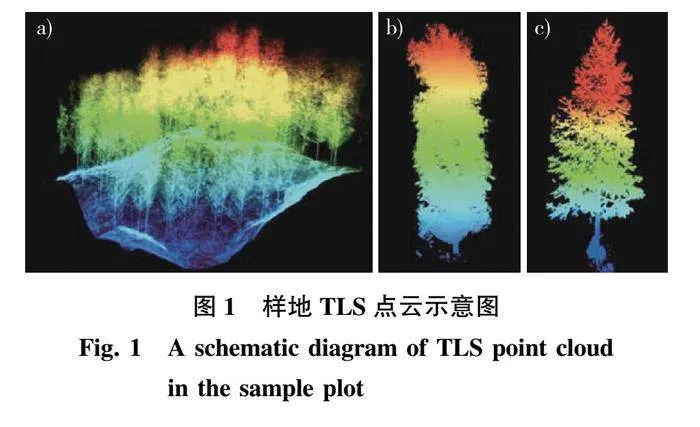
样地TLS点云的采集与样地调查同步进行,采用的地面激光雷达扫描仪型号为Riegl VZ-400i,扫描参数设置激光发射频率为1 200 kHz,有效测量速度为42 000点/s,垂直扫描角度为100° (-40°~60°),水平扫描角度为360°。以多站扫描配准的方式获取样地点云,在样地各角点及中心布设5个扫描站,林分的通视条件较差时需增加扫描站数。标靶球不少于10个,在样地内均匀布设,确保每个角点都能观测到不少于7个标靶,相邻扫描站点之间的公共标靶球在3个以上。最终获得平均点间距为4 mm、测量精度小于5 mm的林分高密度点云数据,结果如图1所示。
TLS数据处理包括点云去噪、地面点滤波、CHM提取和点云归一化。①采用基于点云邻域标准差倍数的去噪算法[22]剔除点云中的噪声点和冗余点。②利用改进的渐进式不规则三角网加密(IPTD)算法[23]将样地点云分成地面点云和植被点云。③对植被最上层点云和地面点云采用不规则三角网插值算法[24]生成数字表面模型(DSM)和数字高程模型(DEM),二者相减获取CHM。④对分类后所得植被点的高程值减去垂直方向投影平面上距离其最近的地物点高程值,得到该点的新高程,并将地面点高程赋值为0,最终获取样地的归一化点云。
1.3 单木探测及参数提取
1.3.1 单木探测方法
研究分别采用基于CHM的局部最大值算法[25-27]和基于归一化点云的PCS算法[12]进行单木探测,针对两种方法在复杂样地探测精度低的问题,引入了点云切片结合聚类算法的单木探测方法,并比较不同探测方法的优劣及其参数敏感性。点云切片结合聚类算法的单木探测研究方法如下:
首先,提取归一化点云在高程为(1.3±0.05)m的点云,剔除该数据集内低矮的杂灌点云,最终得到的点云切片中包含8 000~12 000个点。在此基础上,对点云切片分别采用DBSCAN和均值漂移两种聚类算法进行单木探测。
1)DBSCAN算法。该算法是一种基于密度的空间聚类算法,通过检索空间内的点集在聚类阈值(Eps)范围内的邻域点t (x1, y1, z1),若邻域点数量达到最小聚类点数,则该点标记为核心点Si(Xi, Yi, Zi) (i=0,Ⅰ,Ⅱ,Ⅲ…)。若两相邻核心点如S和SⅠ (XⅠ, YⅠ, ZⅠ)的欧氏距离小于Eps,则称SⅠ由S密度可达,记为S→SⅠ,S、SⅠ以及二者聚类阈值范围内的点共同形成聚类簇;经过数次迭代后得到聚类结果[16]。一般来说,Eps设置得越大或最小聚类点数越小,得到的聚类簇个数就越少[18]。Eps对聚类结果存在较大影响,最小聚类点数往往根据点云切片的点密度情况而调整。因此,笔者设置最小聚类点数为40,然后对Eps开展参数敏感性分析。
2)均值漂移聚类。该算法是一种基于非参数概率密度聚类算法[21,28],以点云切片内任意一点作为起始聚类中心点O (X, Y, Z),聚类半径为r,计算其他点P(x, y, z)到点O的距离d,若d≤ r,则对点P进行标记并加入集合Qr,将点O对点P的访问次数加1(起始值为0)。计算Qr的质心,得到O′ (X′, Y′, Z′),计算O与O′距离DOO′,将聚类中心移至O′,以O′为聚类中心迭代上述过程直到DOO′收敛,此时将O′点作为一类聚类中心输出。接着,以切片内未标记点作为起始点重复上述步骤,直到所有点均被标记。最后根据每个类对每个点的访问次数,选择访问频率最高的类作为当前点集的所属类,输出所有类的中心坐标即完成聚类。
d=(X-x)2+(Y-y)2+(Z-z)2;(1)
X′=1k∑xk∈Qrxk
Y′=1k∑yk∈Qryk
Z′=1k∑zk∈Qrzk;(2)
DOO′=(X′-X)2+(Y′-Y)2+(Z′-Z)2。(3)
式中:k为集合Qr中点的数量。
1.3.2 林木参数提取方法
单木探测后,利用点云切片进行圆拟合估算胸径,计算各单木的所有点(xi, yi)到其重心(xo, yo)的距离,距离的平均值即胸径估测值DBH[19],计算公式如下:
DBH=∑ni=1(xo-xi)2+(yo-yi)2/n。(4)
式中:n为点云切片中各单木点云的数量。
结合最优单木探测结果所获取的每木位置,采用Tao等[20]提出的基于生物学和生态学理论的比较最短路径算法(CSP)分离单木点云。再对单木点云利用最大最小值法提取树高参数,计算垂直方向单木点云的最大值Zmax与最小值Zmin之差即可得到树高估测值[29]。
1.4 精度评价
利用实测单木位置与各单木探测方法提取单木位置进行匹配,若探测单木对应位置存在唯一实测单木,则为正确探测;若存在若干实测单木,则为漏探测;若不存在实测单木,则为过探测[30]。选取召回率Re、准确率p、总体精度得分F作为精度的评价指标[20],计算公式为:
Re=NT/(NT+NO);(5)
p=NT/(NT+NC);(6)
F=2rp/(r+p)。(7)
式中:NT为正确探测的单木株数,NC为误探测的单木株数,NO为漏探测的单木株数。
采用决定系数R2、均方根误差(RMSE,式中记为σRMSE)和相对均方根误差(rRMSE,式中记为σrRMSE)对提取的单木胸径、树高等参数进行精度评价[30],计算方法如下。
R2=1-∑mi=1(y^i-yi)2/∑mi=1(y-i-yi)2;(8)
σRMSE=1m∑mi=1(y^i-yi)2;(9)
σrRMSE=σRMSE/y-i×100%。(10)
式中:m为正确分割的单木株数,y^i表示第i棵林木的提取参数,yi表示第i棵林木的实测参数,y-i表示实测参数的平均值。
2 结果与分析
2.1 不同方法的单木探测精度
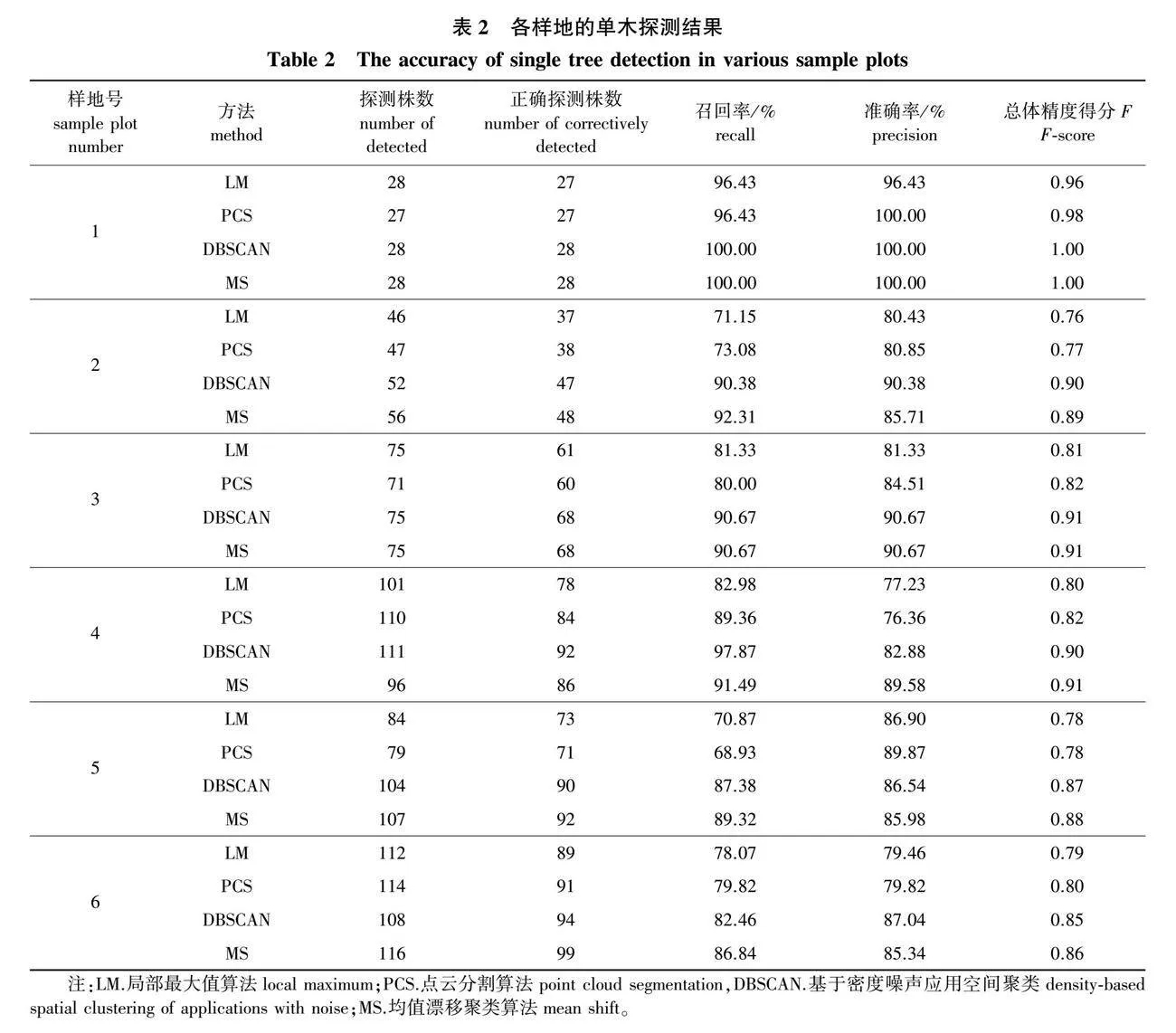
将研究区6个样地分别采用局部最大值LM算法、PCS算法、DBSCAN算法和均值漂移聚类4种方法的单木探测结果与样地实测树木位置进行匹配。将单木实测位置和探测位置转换到统一坐标系下,以探测单木为中心,搜索其半径0.5 m范围以内的实测单木,再根据匹配规则对单木探测结果进行判断。以召回率Re、准确率p和总体精度得分F进行精度评价,结果如表2所示。6个样地使用不同方法时,最优的总体精度得分F ≥ 0.86,说明地面激光雷达对不同样地均可获取良好的单木探测结果。局部最大值算法和PCS算法在样地2的探测精度最低,F得分分别为0.76和0.77;DBSCAN和均值漂移聚类在样地6的探测精度最低,F得分分别为0.85和0.86。基于点云切片的两种聚类算法在每个样地中均优于使用CHM和NPC的探测结果,F得分比局部最大值和PCS算法提高了7.6%~12.5%。
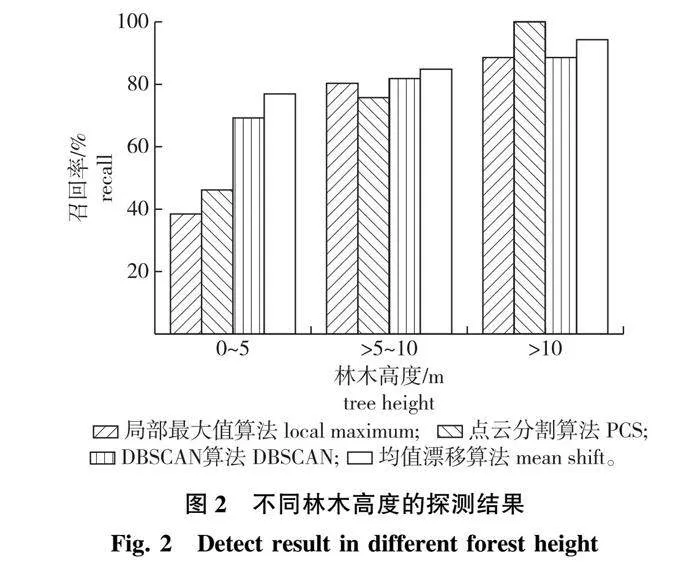
以样地6为例,分析4种方法在不同森林高度分层的单木探测情况,结果如图2所示。
在林木高度超过 10 m时,4种方法的单木召回率均高于88%,说明上层林木能被有效探测;在林木高度为0~5 m时,单木召回率为38.46%~76.92%;说明下层林木存在大量漏召回。随着林木高度降低,4种方法的探测率逐渐降低。
2.2 各方法的参数敏感性分析
为探索4种方法的关键参数对单木探测精度的影响及其在不同样地的适用性,对局部最大值算法的CHM分辨率和窗口大小、PCS算法的距离阈值D、DBSCAN的聚类阈值Esp以及均值漂移聚类的聚类半径r开展参数敏感性分析。
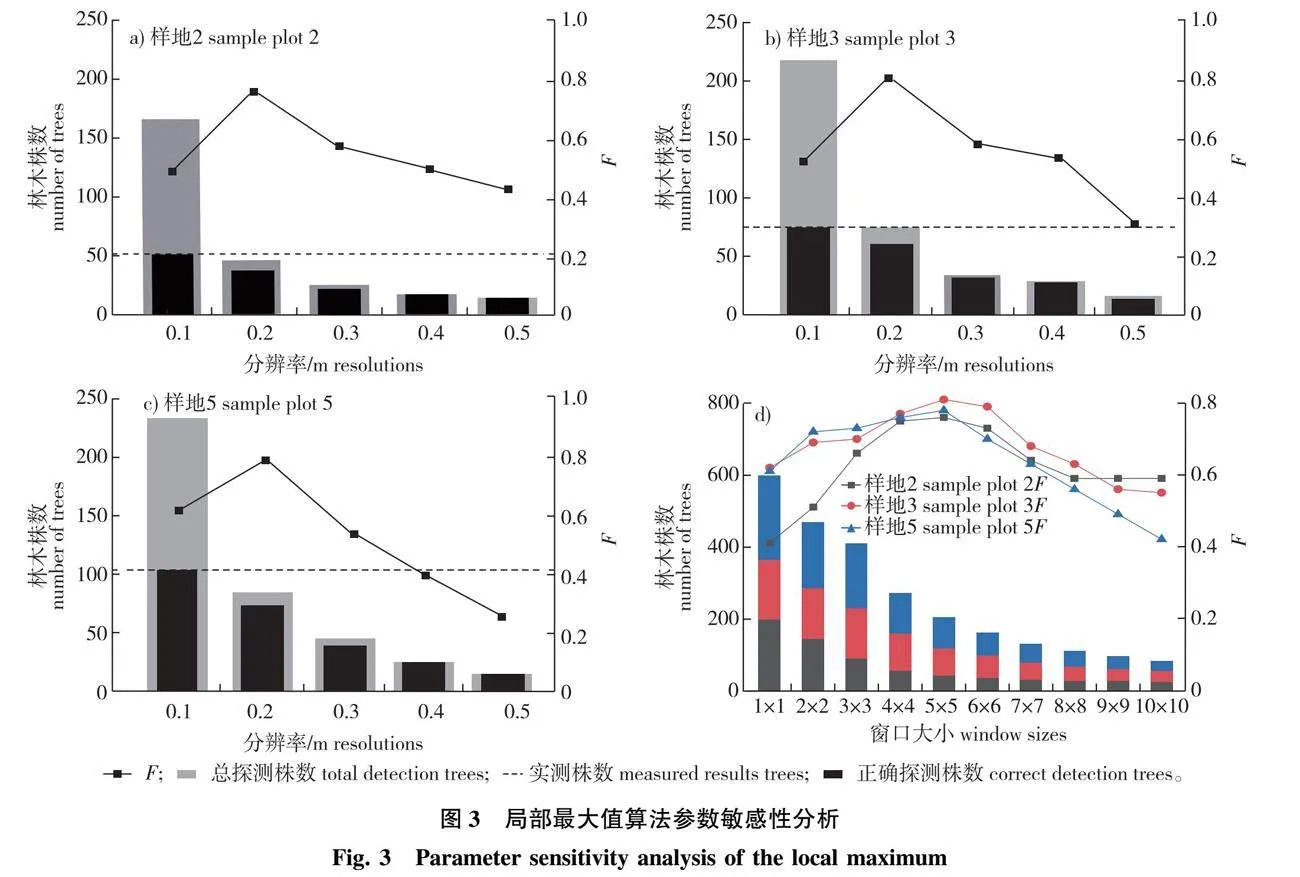
2.2.1 局部最大值算法
以样地2、样地3和样地5为例,分析局部最大值算法的参数在不同林分密度和林木分布情况下的敏感性。CHM分辨率设置为0.1~0.5 m的探测结果如图3所示,分辨率为0.1 m时,3个样地的探测株数均远大于样地实测株树,表现为过探测;分辨率为0.5 m时的探测株数均小于实测株树,表现为漏探测;分辨率为0.2 m时的探测结果最接近于实测值。结果表明,随分辨率增大,单木探测株数不断减少。因此,采用分辨率为0.2 m的CHM,设置窗口大小为1×1至10×10共10组参数,由图3d可知,窗口大小为5×5时3个样地的探测精度得分F均达到最高,分别为0.76、0.81、0.78。对局部最大值算法的两个参数敏感性分析结果说明,林分条件不影响其参数设置,当CHM分辨率和窗口大小的组合值最接近样地优势树种的树冠半径值时,树木探测结果最优。
2.2.2 PCS算法
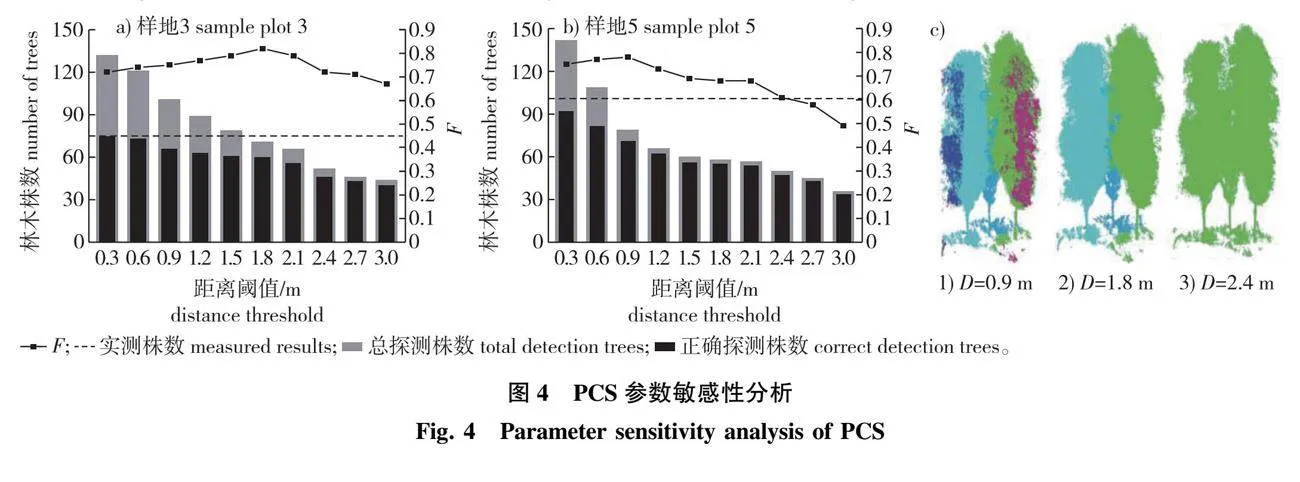
以样地3和样地5为例,分析PCS算法在不同林分密度的参数敏感性。设置距离阈值D为0.3~3.0 m,步长0.3 m,探测结果如图4所示。随D的增大,样地3的探测株数由132株下降至44株,样地5由142株下降至36株;当样地3的距离阈值D为1.8 m、样地5的D为0.9 m时,其探测精度最高,F分别为0.82和0.78。此外,D取0.9、1.8和2.4 m时,PCS在样地3的单木探测细节如图4c所示,D = 0.9 m时,属于同一单木的点云被算法误分为2棵,表现为过探测;D=2.4 m时,距离相近的3株单木被误分为同一株,表现为漏探测;D=1.8 m时,可正确地探测3株单木。实验结果表明,单木探测株数随距离阈值增大而减少,林分密度较大或林木距离较近时,需要设置更小的距离阈值,以获取最优的探测结果。
2.2.3 DBSCAN算法
提取样地1、样地3、样地6的归一化点云切片,分析林分密度对DBSCAN的参数敏感性,聚类阈值Eps设置为0.3 ~3.0 m,步长0.3 m,单木探测结果如图5所示。由图5可知,随Eps的增大,样地1的探测株数从28株到22株,探测精度得分F由1.00下降至0.20,当Eps ≤ 1.8 m时均可获得最佳探测结果;样地3的探测株数从112株降到2株,探测精度得分F从0.90降到0,当Eps ≤ 0.9 m时F得分在0.89以上;样地6的探测株数从108株降到2株,对应的F得分从0.85降到0,当Eps ≤ 0.6 m时,F得分在0.85以上。实验结果说明,DBSCAN算法的单木探测株数随Eps的增大而逐渐减少,最大Eps值由样地中相邻木的最小间距决定。
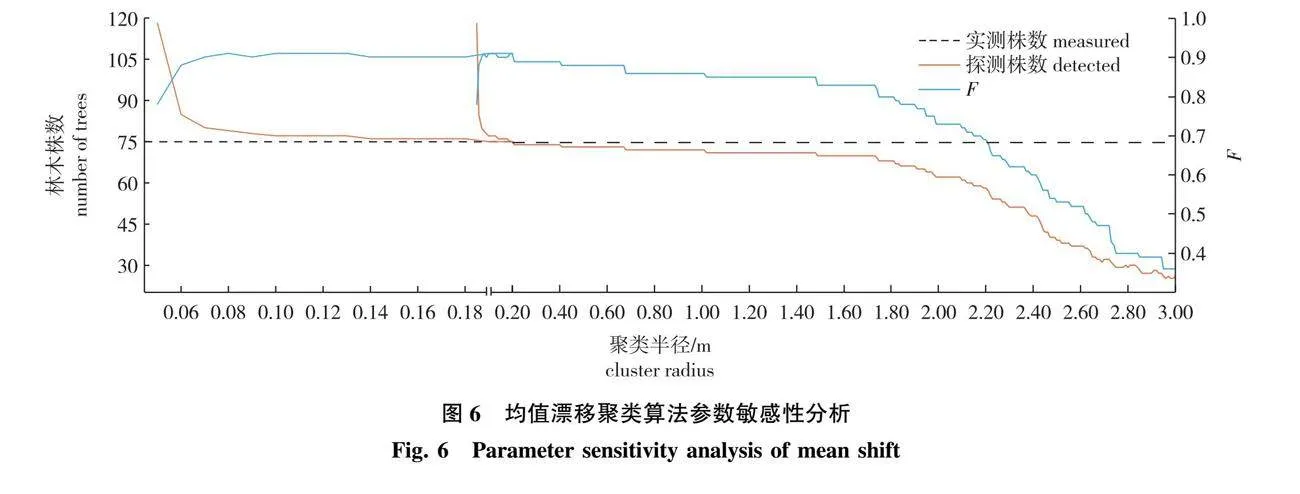
2.2.4 均值漂移聚类算法
选择样地3分析均值漂移聚类算法的参数敏感性,设置聚类半径r为0.05~3.00 m,探测结果如图6所示。当rlt; 0.1 m时,样地的单木探测株数远大于实测株数,表现为过探测;当r接近样地中最大单木胸径为0.18 m时,探测结果稳定,探测株数与实测株数相近,此时探测精度F最高,F=0.91;当rgt; 0.5 m,单木探测株数小于实测株数,表现为漏探测。实验结果说明,单木探测株数随聚类半径r增大而减少,r接近样地中最大单木胸径时的探测结果最优。
2.3 各样地的胸径和树高提取精度
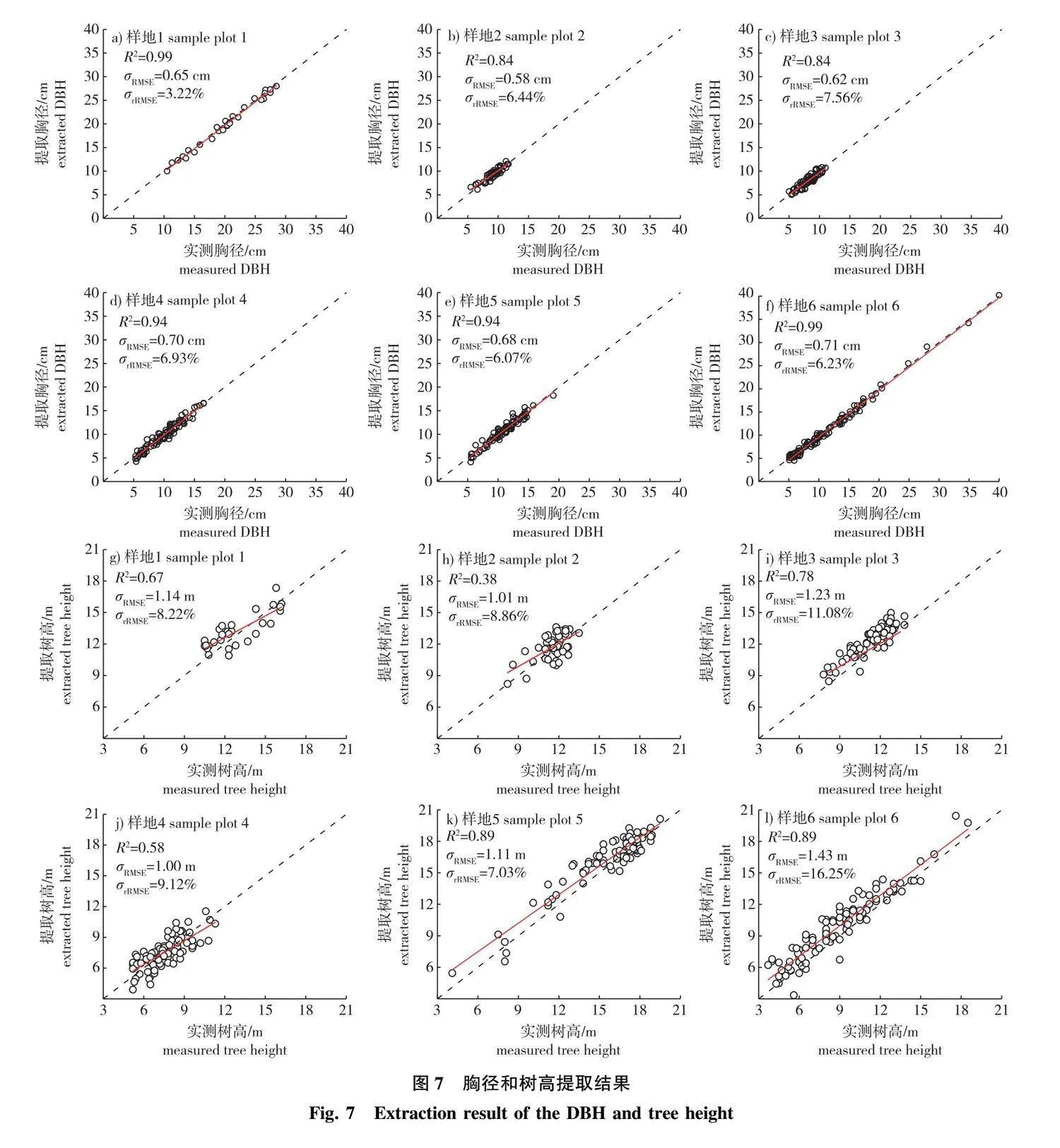
对每个样地最优的单木探测结果,提取单木胸径和树高,并与实测数据做线性拟合,结果如图7所示。6个样地胸径的决定系数(R2)均在0.8以上,均方根误差(RMSE)为0.58 ~0.71 cm,相对均方根误差(rRMSE)为3.22%~7.56%;树高的R2最高为0.89,RMSE为1.00~1.43 m,rRMSE为7.03%~16.25%。结果表明,在6个人工林样地中,地面激光雷达点云提取的胸径和树高结果均可满足森林资源调查的精度需求。
3 讨 论
此次研究采用局部最大值算法、PCS算法、DBSCAN和均值漂移聚类4种方法,对不同林分条件的样地进行单木探测研究,并开展参数敏感性分析。从研究结果来看,CHM分辨率为0.2 m,窗口大小为5×5时的局部最大值算法单木探测精度最高,CHM分辨率过大或过小时,都会导致探测精度得分F降低,这与局部最大值在CHM中的搜索区域与树木的冠层边界不契合有关。搜索区域过小会导致单株树木的冠层在多个窗口中探测到最大值,引起过度探测;搜索区域过大则导致一个窗口中包含若干株树木,但只能探测到树冠最高的单株林木,造成漏探测[31-32]。当PCS算法的距离阈值D接近相邻木间距的一半时,其单木探测精度最高;随距离阈值D的增大,所探测的单木株数不断减少。当距离阈值较小时,属于同一株单木的点云会被PCS算法误分为若干株树木,表现为过探测;当距离阈值较大时,林木距离较近的相邻树木会被误分为同一株,则表现为漏探测[33]。因此,林分密度较大或林木距离较近时,需要设置更小的距离阈值,以获取最优的探测结果。当聚类阈值Eps小于样地中相邻木的最小距离时,DBSCAN的单木探测精度最高。当Eps小于临界值时,每株单木的树干切片点云都能被聚为一类,DBSCAN的探测结果保持稳定;当Eps大于临界值时,导致间距小于此时Eps的相邻木树干切片点云也被聚为一类,探测结果随Eps的增大而逐渐减少。该临界值与样地中林木之间最小距离一致[18]。当聚类半径r接近样地的最大单木胸径时,均值漂移聚类的单木探测精度最大;r小于该值时,属于同株单木的点云易被误分为若干株,造成过探测;随r增大,相邻单木的点云聚为一类,导致漏探测[28]。因此,为了获取更高精度的单木探测结果,需要根据样地实际情况,选择合适的探测方法并设置最优的算法参数。
样地类型对单木探测结果的影响主要表现为林木分布情况和林分密度大小。在林木分布较为均匀的样地3中,4种方法的探测结果明显优于林木分布聚集的样地2,说明林木分布越均匀,探测精度越高,Ma等[30]的研究也证实了这一结果。4种方法在林分密度较低的样地1探测结果均优于林分密度较高的样地6,说明林分密度是影响单木探测的重要因素[14,34-35]。同时,Yang等[36]的研究表明不同树种的树冠大小、形状和骨架结构等存在差异,单木探测的效果也不相同。但在本研究中,由于桉树和杉木的树形相似,其主干与树冠易于识别,因此4种方法在林分条件相近而树种不同的样地3和样地4中的单木探测结果受树种影响较小。
此外,样地内林木高度分布对探测结果也存在影响。杨海城[37]对不同林层进行单木探测及参数提取的研究表明,树冠下层林木存在漏探测。本研究对不同高度分层的单木探测结果表明,4种方法在最上层林木的探测能力明显优于下层的低矮林木。局部最大值算法和PCS算法在高度为5 m以下的林木召回率不足50%,而DBSCAN和均值漂移聚类的召回率可达70%,说明点云切片结合聚类算法的优势在于对下层林木探测能力的提升。由于本研究采用的点云切片高度为(1.3 ± 0.05)m,因此不可避免地受到林下植被等的干扰,错将灌木丛识别为树干,导致探测误差。在未来研究中应对聚类算法进行改进,提高探测率和准确率。
4 结 论
1)点云切片结合聚类算法的单木探测方案具有更高的探测能力,能探测更多下层林木;单木探测精度得分F比局部最大值算法和PCS算法提高了7.6%~12.5%。
2)对不同林分条件的样地需要调整各方法的关键参数。局部最大值算法应考虑CHM分辨率和窗口大小的组合,使之最接近样地优势树种的树冠半径值;PCS在林木排列紧密情况下应设置较小的距离阈值;DBSCAN的聚类阈值Eps取决于样地中相邻木的最小间距;均值漂移聚类的聚类半径r由样地的最大单木胸径决定。
3)地面激光雷达可以应用于不同森林类型的单木参数提取。研究选取的6个样地中各方法均可获得较好的单木探测结果,最优F得分为0.86;对于胸径和树高提取结果,胸径RMSE不超过0.71 cm,树高RMSE不超过1.43 m。
参考文献(reference):
[1]曹林,佘光辉,代劲松,等.激光雷达技术估测森林生物量的研究现状及展望[J].南京林业大学学报(自然科学版),2013,37(3):163-169.CAO L,SHE G H,DAI J S,et al.Status and prospects of the LiDAR-based forest biomass estimation[J].J Nanjing For Univ (Nat Sci Ed),2013,37(3):163-169.DOI: 10.3969/j.issn.1000-2006.2013.03.029.
[2]李增元,刘清旺,庞勇.激光雷达森林参数反演研究进展[J].遥感学报,2016,20(5):1138-1150.LI Z Y,LIU Q W,PANG Y.Review on forest parameters inversion using LiDAR[J].J Remote Sens,2016,20(5):1138-1150.DOI: 10.11834/jrs.20165130.
[3]吴楠,李增元,廖声熙,等.国内外林业遥感应用研究概况与展望[J].世界林业研究,2017,30(6):34-40.WU N,LI Z Y,LIAO S X,et al.Current situation and prospect of research on application of remote sensing to forestry[J].World For Res,2017,30(6):34-40.DOI: 10.13348/j.cnki.sjlyyj.2017.0075.y.
[4]刘鲁霞,庞勇.机载激光雷达和地基激光雷达林业应用现状[J].世界林业研究,2014,27(1):49-56.LIU L X,PANG Y.Applications of airborne laser scanning and terrestrial laser scanning to forestry[J].World For Res,2014,27(1):49-56.DOI: 10.13348/j.cnki.sjlyyj.2014.01.009.
[5]花伟成,田佳榕,孙心雨,等.基于TLS数据的杨树削度方程建立及材积估算[J].南京林业大学学报(自然科学版),2021,45(4):41-48.HUA W C,TIAN J R,SUN X Y,et al.Assessing the stem taper function and volume estimation of poplar (Populus)by terrestrial laser scanning[J].J Nanjing For Univ (Nat Sci Ed),2021,45(4):41-48.DOI: 10.12302/j.issn.1000-2006.202006023.
[6]蒋佳文,温小荣,顾海波,等.基于多站扫描的点云特征参数与材积结构动态分析[J].南京林业大学学报(自然科学版),2019,43(6):83-90.JIANG J W,WEN X R,GU H B,et al.Dynamic analysis of point cloud characteristic parameters and volume structure based on multi-station scan[J].J Nanjing For Univ (Nat Sci Ed),2019,43(6):83-90.DOI: 10.3969/j.issn.1000-2006.201901020.
[7]XU D D,WANG H B,XU W X,et al.LiDAR applications to estimate forest biomass at individual tree scale:opportunities,challenges and future perspectives[J].Forests,2021,12(5):550.DOI: 10.3390/f12050550.
[8]刘会玲,张晓丽,张莹,等.机载激光雷达单木识别研究进展[J].激光与光电子学进展,2018,55(8):40-48.LIU H L,ZHANG X L,ZHANG Y,et al.Review on individual tree detection based on airborne LiDAR[J].Laser Optoelectron Prog,2018,55(8):40-48.DOI: 10.3788/LOP55.082805.
[9]WANG L,GONG P,BIGING G S.Individual tree-crown delineation and treetop detection in high-spatial-resolution aerial imagery[J].Photogramm Eng Remote Sensing,2004,70(3):351-357.DOI: 10.14358/pers.70.3.351.
[10]刘方舟,刘浩,云挺.基于分水岭优化思想的单木信息分割算法[J].林业工程学报,2020,5(5):109-116.LIU F Z,LIU H,YUN T.Individual tree crown separation using the improved watershed method[J].J For Eng,2020,5(5):109-116.DOI: 10.13360/j.issn.2096-1359.202001021.
[11]郭庆华,刘瑾,陶胜利,等.激光雷达在森林生态系统监测模拟中的应用现状与展望[J].科学通报,2014,59(6):459-478.GUO Q H,LIU J,TAO S L,et al.Perspectives and prospects of LiDAR in forest ecosystem monitoring and modeling[J].Chin Sci Bull,2014,59(6):459-478.DOI: 10.1360/972013-592.
[12]LI W K,GUO Q H,JAKUBOWSKI M K,et al.A new method for segmenting individual trees from the lidar point cloud[J].Photogramm Eng Remote Sensing,2012,78(1):75-84.DOI: 10.14358/pers.78.1.75.
[13]LIANG X L,KANKARE V,HYYPP J,et al.Terrestrial laser scanning in forest inventories[J].ISPRS J Photogramm Remote Sens,2016,115:63-77.DOI: 10.1016/j.isprsjprs.2016.01.006.
[14]LU X C,GUO Q H,LI W K,et al.A bottom-up approach to segment individual deciduous trees using leaf-off lidar point cloud data[J].ISPRS J Photogramm Remote Sens,2014,94:1-12.DOI: 10.1016/j.isprsjprs.2014.03.014.
[15]CHEN W,HU X B,CHEN W,et al.Airborne LiDAR remote sensing for individual tree forest inventory using trunk detection-aided mean shift clustering techniques[J].Remote Sens,2018,10(7):1078.DOI: 10.3390/rs10071078.
[16]MADHULATHA T S.An overview on clustering methods[J].IOSR J Eng,2012,2(4):719-725.DOI: 10.9790/3021-0204719725.
[17]林秀云,孙圆,刘晨曦,等.依据地面激光扫描数据的杉木材积建模与造材[J].东北林业大学学报,2022,50(1):33-39.LIN X Y,SUN Y,LIU C X,et al.Volume modeling and merchantable volume for Cunninghamia lanceolata using terrestrial laser scanner[J].J Northeast For Univ,2022,50(1):33-39.DOI: 10.13759/j.cnki.dlxb.2022.01.012.
[18]WANG C X,JI M,WANG J,et al.an improved DBSCAN method for LiDAR data segmentation with automatic eps estimation[J].Sensors,2019,19(1):172.DOI: 10.3390/s19010172.
[19]麻卫峰,王金亮,麻源源,等.改进K均值聚类的点云林木胸径提取[J].测绘科学,2021,46(9):122-129.MA W F,WANG J L,MA Y Y,et al.An improved K-means clustering method for DBH extraction from point cloud[J].Science of Surveying and Mapping,2021,46(9):122-129.DOI:10.16251/j.cnki.1009-2307.2021.09.016.
[20]TAO S L,WU F F,GUO Q H,et al.Segmenting tree crowns from terrestrial and mobile LiDAR data by exploring ecological theories[J].ISPRS J Photogramm Remote Sens,2015,110:66-76.DOI: 10.1016/j.isprsjprs.2015.10.007.
[21]DUONG T,BECK G,AZZAG H,et al.Nearest neighbour estimators of density derivatives,with application to mean shift clustering[J].Pattern Recognit Lett,2016,80:224-230.DOI: 10.1016/j.patrec.2016.06.021.
[22]朱德海.点云库PCL学习教程[M].北京:北京航空航天大学出版社,2012:189-191.ZHU D H.PCL learning course of point cloud library[M].Beijing:Beijing University of Aeronautics amp; Astronautics Press,2012:189-191.
[23]ZHAO X Q,GUO Q H,SU Y J,et al.Improved progressive TIN densification filtering algorithm for airborne LiDAR data in forested areas[J].ISPRS J Photogramm Remote Sens,2016,117:79-91.DOI: 10.1016/j.isprsjprs.2016.03.016.
[24]KHOSRAVIPOUR A,SKIDMORE A K,ISENBURG M.Generating spike-free digital surface models using LiDAR raw point clouds:a new approach for forestry applications[J].Int J Appl Earth Obs Geoinf,2016,52:104-114.DOI: 10.1016/j.jag.2016.06.005.
[25]WULDER M,NIEMANN K O,GOODENOUGH D G.Local maximum filtering for the extraction of tree locations and basal area from high spatial resolution imagery[J].Remote Sens Environ,2000,73(1):103-114.DOI: 10.1016/S0034-4257(00)00101-2.
[26]POPESCU S C,WYNNE R H,NELSON R F.Estimating plot-level tree heights with lidar:local filtering with a canopy-height based variable window size[J].Comput Electron Agric,2002,37(1/2/3):71-95.DOI: 10.1016/S0168-1699(02)00121-7.
[27]CHEN Q,BALDOCCHI D,GONG P,et al.Isolating individual trees in a savanna woodland using small footprint lidar data[J].Photogramm Eng Remote Sensing,2006,72(8):923-932.DOI: 10.14358/pers.72.8.923.
[28]TANG J,JIANG F G,LONG Y,et al.Identification of the yield of Camellia oleifera based on color space by the optimized mean shift clustering algorithm using terrestrial laser scanning[J].Remote Sens,2022,14(3):642.DOI: 10.3390/rs14030642.
[29]WATT P J,DONOGHUE D N M.Measuring forest structure with terrestrial laser scanning[J].Int J Remote Sens,2005,26(7):1437-1446.DOI: 10.1080/01431160512331337961.
[30]MA K S,CHEN Z X,FU L Y,et al.Performance and sensitivity of individual tree segmentation methods for UAV-LiDAR in multiple forest types[J].Remote Sens,2022,14(2):298.DOI: 10.3390/rs14020298.
[31]李响,甄贞,赵颖慧.基于局域最大值法单木位置探测的适宜模型研究[J].北京林业大学学报,2015,37(3):27-33.LI X,ZHEN Z,ZHAO Y H.Suitable model of detecting the position of individual treetop based on local maximum method[J].J Beijing For Univ,2015,37(3):27-33.DOI: 10.13332/j.1000-1522.20140313.
[32]LISIEWICZ M,KAMINSKA A,STERENCZAK K.Recognition of specified errors of individual tree detection methods based on canopy height model[J].Remote Sens Appl,2022,25:100690.DOI: 10.1016/j.rsase.2021.100690.
[33]ZHEN Z,QUACKENBUSH L,ZHANG L J.Trends in automatic individual tree crown detection and delineation: evolution of LiDAR data[J].Remote Sens,2016,8(4):333.DOI: 10.3390/rs8040333.
[34]LIU J B,LIANG X L,HYYPP J,et al.Automated matching of multiple terrestrial laser scans for stem mapping without the use of artificial references[J].Int J Appl Earth Obs Geoinf,2017,56:13-23.DOI: 10.1016/j.jag.2016.11.003.
[35]WANG Y S,HYYPP J,LIANG X L,et al.International benchmarking of the individual tree detection methods for modeling 3-D canopy structure for silviculture and forest ecology using airborne laser scanning[J].IEEE Trans Geosci Remote Sens,2016,54(9):5011-5027.DOI: 10.1109/TGRS.2016.2543225.
[36]YANG Q L,SU Y J,JIN S C,et al.The influence of vegetation characteristics on individual tree segmentation methods with airborne LiDAR data[J].Remote Sens,2019,11(23):2880.DOI: 10.3390/rs11232880.
[37]杨海城.基于ULS和TLS的天然次生林不同林层单木参数估测及对比[D].哈尔滨:东北林业大学,2021.YANG H C.Estimation and comparison of individual tree parameters for different forest canopies in natural secondary forest based on ULS and TLS[D].Harbin:Northeast Forestry University,2021.
(责任编辑 李燕文)
收稿日期Received:2022-06-20""" 修回日期Accepted:2022-08-29
基金项目:国家自然科学基金面上项目(31971578); 湖南省自然科学基金面上项目(2022JJ30078)。
第一作者:易静(yijing@csuft.edu.cn)。
*通信作者:孙华(sunhua@csuft.edu.cn),教授。
引文格式:易静,马开森,向建平,等. 点云切片结合聚类算法的TLS单木探测方法研究[J]. 南京林业大学学报(自然科学版),2024,48(4):113-122.
YI J, MA K S, XIANG J P, et al. Research on TLS single tree detection method based on point cloud slicing combined with clustering algorithm[J]. Journal of Nanjing Forestry University (Natural Sciences Edition),2024,48(4):113-122.
DOI:10.12302/j.issn.1000-2006.202206035.
猜你喜欢
农业工程学报(2022年14期)2022-10-19 02:24:48
现代园艺(2021年23期)2021-12-01 07:47:44
地理空间信息(2021年10期)2021-11-14 10:01:12
林业勘查设计(2020年1期)2021-01-18 02:40:48
新农业(2020年18期)2021-01-07 02:17:08
临床检验杂志(电子版)(2020年1期)2020-04-03 04:00:16
遥感信息(2019年1期)2019-03-22 01:38:16
新农民(2019年9期)2019-02-19 14:19:13
森林工程(2018年5期)2018-05-14 13:54:30
学苑创造·B版(2015年12期)2016-06-23 09:36:36