
基于机电液联合仿真的高空测试转台俯仰运动控制
2024-08-31 00:00:00丁彦苏邓文翔刘家辉姚建勇
机械制造与自动化 2024年3期



摘 要:针对高空测试转台俯仰运动存在负载不平衡以及液压缸之间的耦合效应,通过Adams和AMESim分别构建高空测试转台三维俯仰转台的刚柔耦合动力学模型和电液控制系统模型,采用PID控制算法对测试转台俯仰系统技术指标要求的工况进行联合仿真。结果表明:俯仰平台的实际角度能很好地跟踪角度指令,满足定向精度要求,为后续的试验研究奠定了理论基础。该方法弥补了单一仿真软件不能对系统进行完整仿真的不足,可以更加全面、准确地反映研究对象的真实控制与运动状态,对于复杂的机电液一体化系统具有普遍的适用性。
关键词:高空测试转台;刚柔耦合;PID控制;联合仿真
中图分类号:TP273文献标志码:A文章编号:1671-5276(2024)03-0215-04
Pitch Motion Control of High-altitude Test Turntable Based on Electro-mechanical-hydraulic Co-simulation
Abstract:Considering the load imbalance and the coupling between the hydraulic cylinders, the rigid-flexible coupling dynamics model and the electro-hydraulic control system model of the three-dimensional pitching turntable of the high-altitude test turntable were constructed by Adams and AMESim respectively. The PID control algorithm was used to co-simulate the working conditions required by the technical indicators of the test turntable pitching system. The results show that the actual angle of the pitching platform can track the angle command well and meet the requirements of orientation accuracy, which lays a theoretical foundation for subsequent experimental research. The method makes up for the deficiency that a single simulation software cannot perform a complete simulation of the system, and more accurately reflects the real control and motion state of the research object, which has universal applicability to complex electromechanical-hydraulic integrated systems.
Keywords:high-altitude test turntable; rigid-flexible coupling; PID control; co-simulation
0 引言
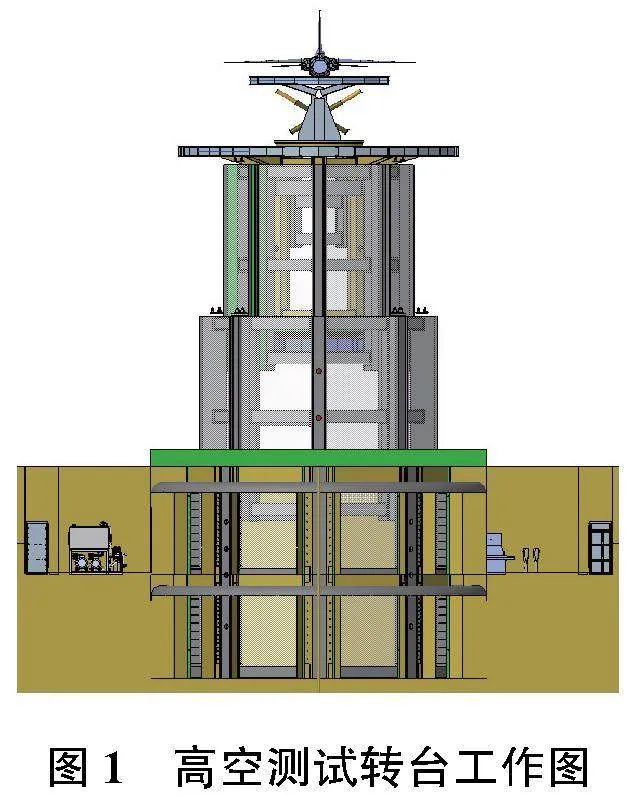
测试转台是航空航天、兵器工业等领域中进行半实物仿真、评价武器装备性能效果的关键设备。作为一种高精尖试验设备,某高空测试转台的主要作用是用来测试武器装备防电磁脉冲的性能,其工作图如图1所示。由于武器装备任意方向均可能受到如电磁脉冲攻击等干扰,所以需要将其加装到测试转台上,利用测试转台模拟复现其实际作战时的任意方位、俯仰等姿态变化,在复杂环境下对相关装备加以反复测试和研究,从而为相关装备的方案设计和性能评估提供各种参考依据。
要想使测试转台获得更好的跟踪精度和实时性能,在其机械结构一定的前提下,从系统的建模和控制方面改进是行之有效的方法。与传统的基于单仿真软件的设计分析方法相比,多学科多软件的联合仿真技术可以更加真实、准确、高效地反映系统的动态特性与控制状态,这也是目前机电液一体化领域中的研究热点之一。
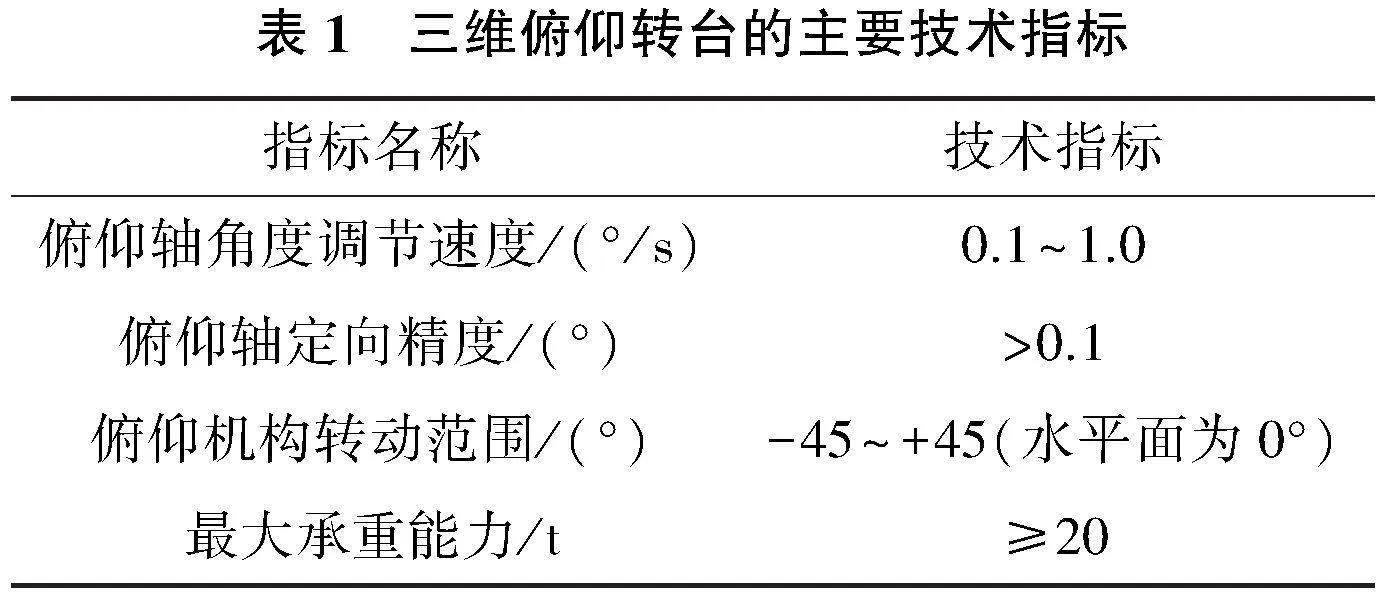
本文针对某高空测试转台俯仰系统,通过Adams和AMESim软件分别对俯仰系统中的机械、液压和控制部分进行建模,通过联合仿真分析获得高空测试转台俯仰系统的动态性能,以考察是否满足技术指标要求。俯仰转台的技术指标如表1所示。
1 测试转台动力学模型
高空测试转台上的三维俯仰转台通过伺服阀驱动4组高精密液压缸两推两拉交叉配合伸缩,输出推力带动俯仰平台在-45°~+45°(规定水平面为0°)范围内转动。虽然转台只有1个自由度,但是包括了4个液压缸,整个俯仰机构实质上是一个多输入单输出系统,是高度非线性的,且存在大量模型不确定性和冗余驱动约束问题[1]。想要构建其动力学方程,建立精确的数学模型是十分困难的。为此通过Adams软件建立三维俯仰转台的刚柔耦合动力学模型,为之后的联合仿真做铺垫。
1.1 高空测试转台刚柔耦合总体模型
高空测试转台的三维转台俯仰系统是一个十分复杂的系统,想要建立一个包含所有部件的完整动力学模型是不现实的,所以必须做出一些适当的简化,以建立合理的动力学模型。在建模过程中,根据其结构特点,可将俯仰转台分为转台平台、底座、液压缸和俯仰机构等几部分。转台的机械几何模型在SolidWorks软件中建立并简化好后导入Adams中,柔性部件通过ABAQUS建立后替换原刚性部件,再根据系统的运动特征添加各部件之间的运动副。所建立的高空测试转台三维转台俯仰机构刚柔耦合总体模型如图2所示。
1.2 俯仰轴和铰接耳轴的柔性体建模
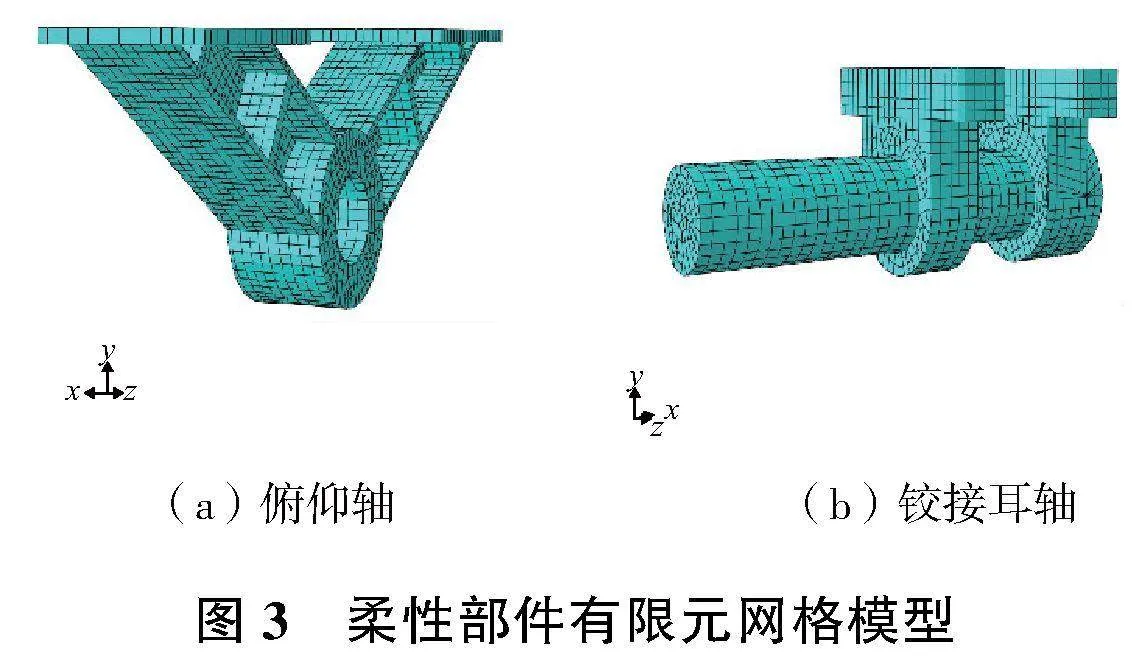
测试转台的俯仰运动过程中存在负载不平衡,俯仰轴存在较明显的弹性变形。此外,多个液压缸运动时产生的耦合效应可能会导致系统卡死。对此,将俯仰轴和铰接耳轴柔性化。Adams软件中柔性体建模主要包括离散化方法和引入模态中性文件方法[2]。本文借助有限元软件ABAQUS,对俯仰轴和铰接耳轴离散化处理,创建模态中性文件,步骤如下:1)定义材料参数;2)划分六面体网格;3)建立与其他部件连接处的RP参考点;4)对创建的参考点施加约束和边界条件;5)用Lanczos法提取模态进行模态分析;6)利用命令流生成.mnf 模态中性文件,在 Adams中通过Flex接口导入.mnf文件替换原刚性部件,完成柔性体模型的建立[3]。
柔性俯仰轴和铰接耳轴的有限元网格模型如图3所示。
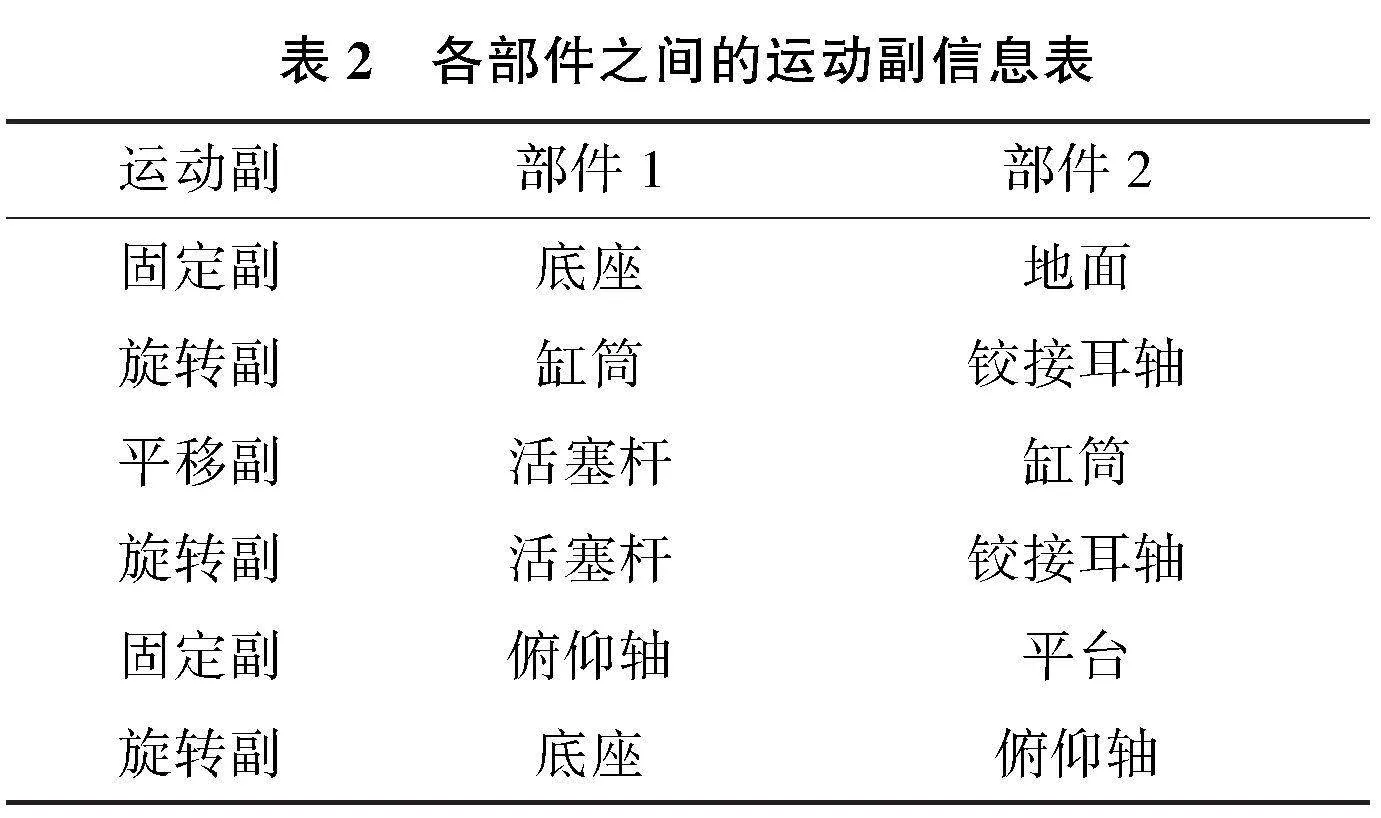
1.3 运动副的定义
在完成相关部件的柔性化后,为了建立有效的刚柔耦合动力学模型,必须在各部件之间添加合适的运动副。各部件之间运动副的定义如表2所示。
2 测试转台液压控制系统模型
2.1 控制方法
在先进的工业过程控制中,经典控制理论中的PID控制无需建立精确的被控对象模型,且具有算法简单、鲁棒性好和适应性强等优点,有着最为广泛的应用。在AMESim软件中有PID模块可以直接调用。综上,本文高空测试转台俯仰系统中控制器采用的控制策略是PID控制。
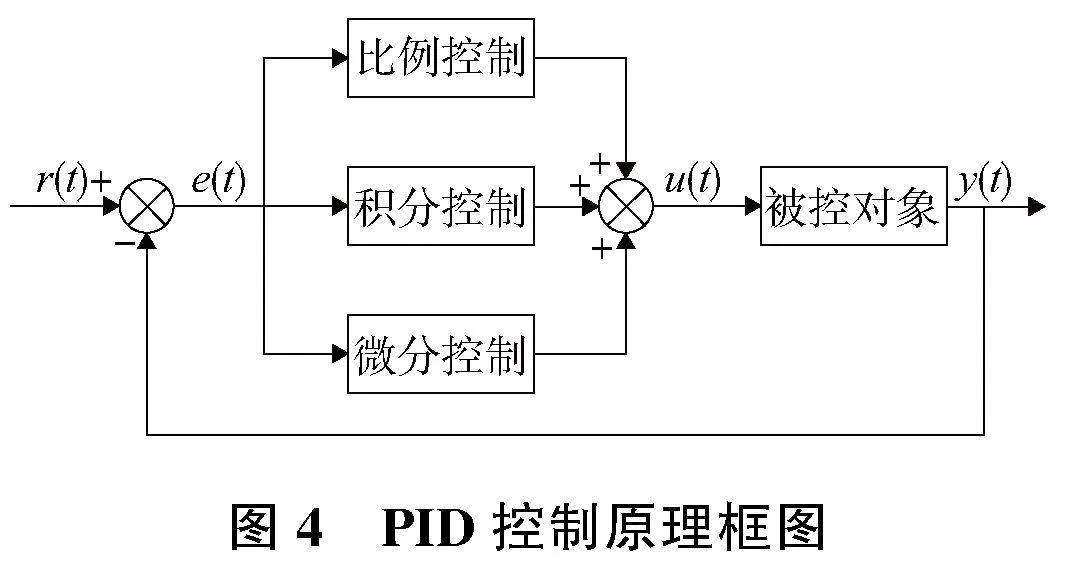
PID控制器通过比例、积分、微分的线性组合来对给定值与实际输出值相减得到的系统偏差进行控制,是一种负反馈控制[4],其控制原理如图4所示。
其控制算法如下:
式中:e(t)为系统偏差;Kp为比例系数;Ki为积分时间常数;Kd为微分时间常数。
2.2 液压系统模型
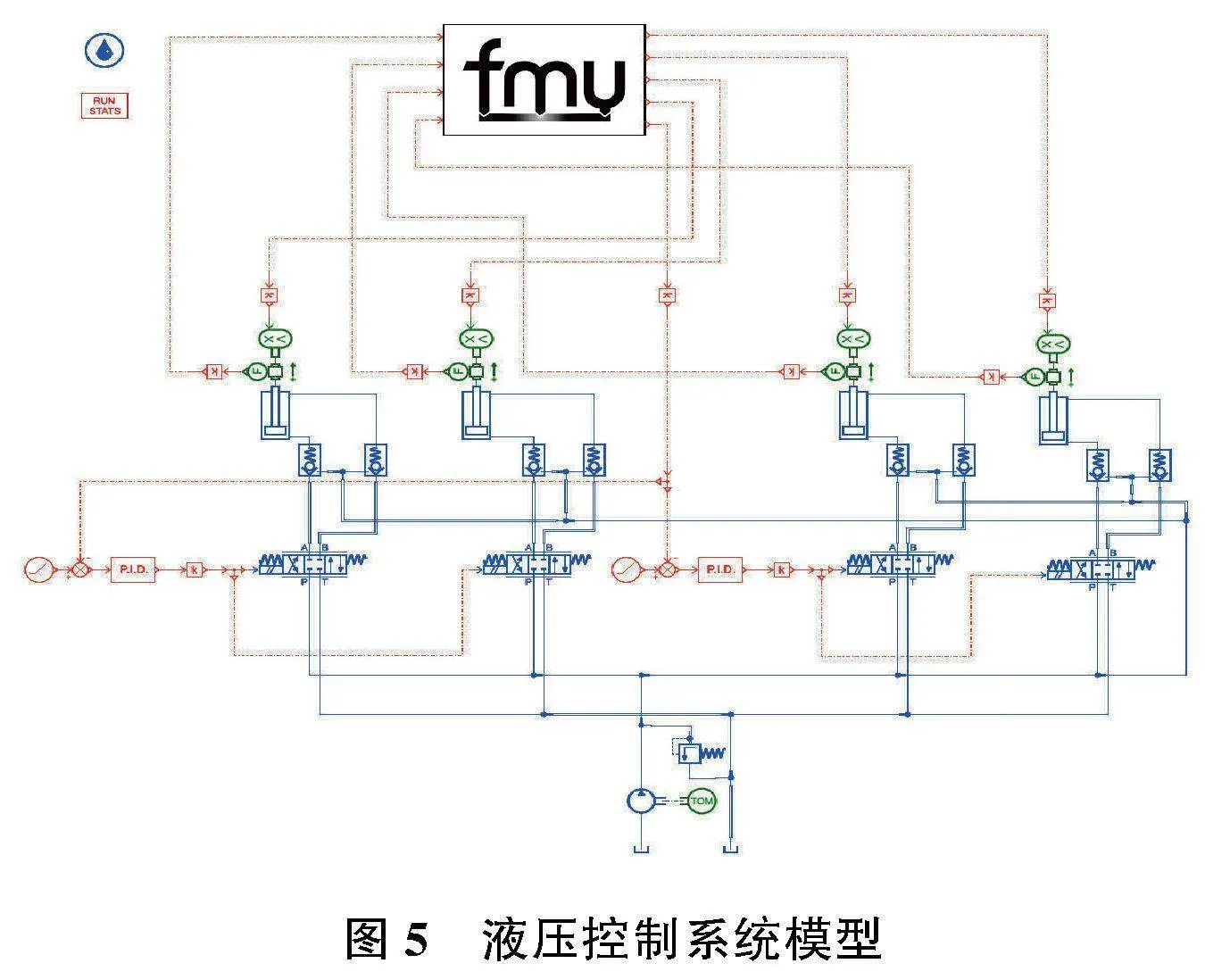
俯仰液压系统为伺服闭环控制系统,主要由伺服阀、伺服液压缸、电磁开关阀、液控单向阀、压力传感器等组成。采用比例闭环控制形式,即通过对三维俯仰转台的状态进行实时检测、反馈,调整比例伺服阀的输出,改变各支点油缸的运动速度,以达到0.1°/s~1.0°/s 的伺服驱动能力,实现较高的控制精度。在油缸的进油和出油口,还装有液控单向阀来实现俯仰机构姿态的保持。在AMESim中建立的液压控制系统模型即最后的联合仿真模型,如图5所示。
3 联合仿真分析
3.1 联合仿真的工作过程
三维转台俯仰运动测控系统工作流程如图6所示。联合仿真的工作过程是Adams中的俯仰机构动力学模型接受AMESim液压模型输出的液压驱动力驱动液压缸运动,将输出信号即缸的位移和转台的俯仰角度反馈给AMESim,AMESim中的控制器根据反馈得到的参数输出信号控制AMESim中的比例伺服阀,使AMESim输出液压驱动力,驱动高空测试转台完成期望运动[5]。
3.2 联合仿真模型的建立
以AMESim为主控软件进行联合仿真的核心是通过Adams和AMESim软件之间的FMU接口模块实现输入变量与输出变量数据的实时交换。在Adams/Control模块中,如图7所示,将4个液压缸的驱动力定义为输入变量,将转台的俯仰角度以及4个液压缸活塞杆的位移定义为输出变量。设置完成后,把生成的.fmu文件导入AMESim便可完成高空测试转台三维俯仰转台机电液一体化联合仿真模型的建立(图5)。
3.3 仿真结果及分析
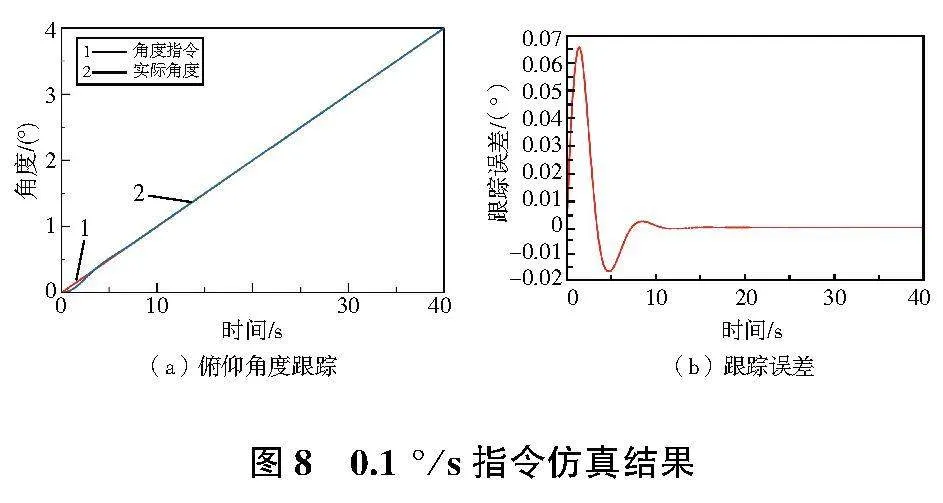
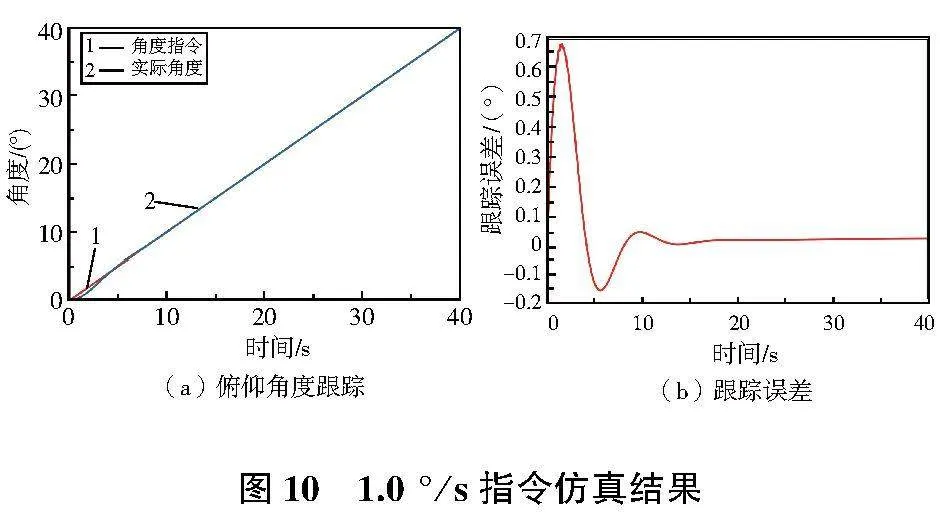
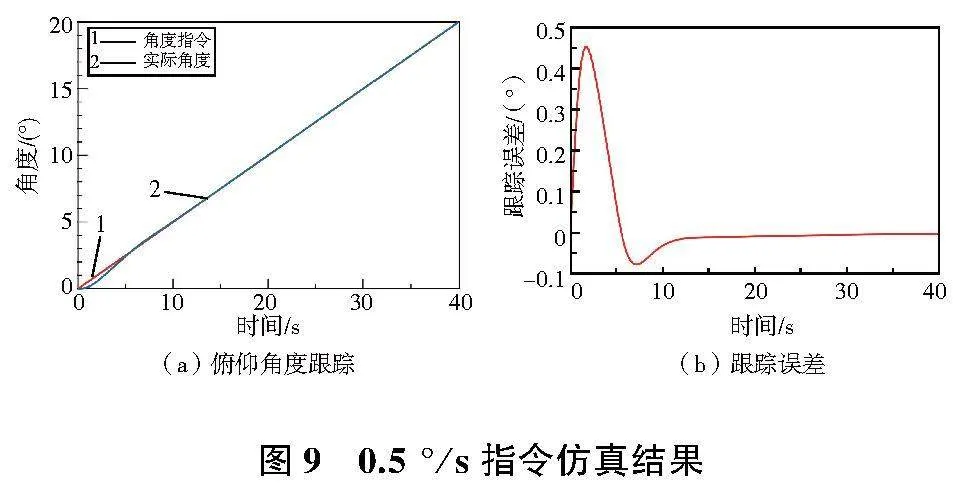
由于转台在俯仰运动过程中存在负载不平衡的情况,所以在Adams中设置载荷质心水平面投影偏离平台中心0.4m,给定不同角速度下的斜坡指令跟踪,考核在恶劣的偏载环境下、不同调速步进值下的控制精度是否满足指标要求,即优于0.1°。分别给定0.1°/s、0.5°/s、1.0°/s的斜坡指令,仿真结果如图8—图10所示。
从图8—图10中可以看到,在偏载环境下,启动初期由于系统大负载的惯性作用导致震荡较大,经过PID控制器的调节后,转台俯仰运动可以很好地跟踪期望信号,不同斜坡指令下的跟踪精度均优于0.1°,满足技术指标对于俯仰轴角度调节速度和精度的要求。
4 结语
针对高空测试转台俯仰系统的运动和控制需求,基于Adams和AMESim软件进行了俯仰机构的联合仿真分析,结果如下。
1)联合仿真大大简化了建立高空测试转台中俯仰机构动力学模型的计算量,通过交互模式在Adams中可以实时观察到转台的实际运动状态。
2)对铰接耳轴和俯仰轴进行柔性化,建立高空测试转台的刚柔耦合动力学模型,可以避免俯仰运动仿真过程中因负载不平衡和多个液压缸运动时产生的耦合效应导致系统卡死的情况出现。
3)建立了基于Adams和AMESim的高空测试转台三维俯仰转台机电液一体化联合仿真模型,在考虑偏载的情况下,采用PID算法对转台俯仰系统技术指标要求的工况进行了闭环反馈控制。结果表明:俯仰平台的实际角度能很好地跟踪角度指令,满足定向精度要求,为后续测试转台的研制、试验和实际应用等提供了理论基础。
4)通过多领域多软件平台的联合仿真可以对高空测试转台的整体受控状态进行更加全面、准确的可视化分析,机械、液压、控制系统设计共用一个模型进行调试和试验,大大提高了工作效率。该方法对于复杂的机电液一体化系统具有普遍的适用性。
参考文献:
[1] 杨钢,傅晓云,李宝仁. 两自由度冗余驱动并联机器人的研究[J]. 系统仿真学报,2006,18(2):416-419,423.
[2] 蔡光,吴谨,肖潇. 基于Adams与Ansys的柔性多体系统运动特性仿真分析[J]. 制造业自动化,2014,36(23):67-70.
[3] 张玉航. 火箭炮行进间伺服发射控制技术研究[D]. 南京:南京理工大学,2020:12-13.
[4] 李资,张海丽. 基于AMESim-Matlab的伺服电机速度-压力回路仿真研究[J]. 机械制造与自动化,2021,50(6):135-137.
[5] 王利娟,李俊霞,胡新城,等. 6-DOF摆台多系统联合仿真与实验研究[J]. 舰船电子工程,2020,40(1):94-98.
猜你喜欢
科技资讯(2016年31期)2017-03-30 11:25:06
科技创新导报(2016年24期)2017-03-13 02:52:42
科学与财富(2016年32期)2017-03-04 20:04:05
计算机教育(2016年8期)2016-12-24 10:26:06
山东工业技术(2016年23期)2016-12-23 17:27:08
教育界·下旬(2016年8期)2016-12-14 10:35:15
科学与财富(2016年26期)2016-12-01 21:15:53
企业技术开发·中旬刊(2016年10期)2016-11-12 14:53:44
科技视界(2016年6期)2016-07-12 09:16:47
科技视界(2016年12期)2016-05-25 12:01:14
