
基于人体工学的手动轮椅助力装置研究
2024-08-31 00:00:00肖天骄蒋凡魏晨婧
机械制造与自动化 2024年3期
关键词:人体工学






摘 要:针对我国失能、半失能老人使用非电动轮椅推行费力的现状,综合考虑使用者功能需求、使用环境与可行技术支撑三方面的要素,从动力系统可靠性理论计算、人体工学设计以及智能控制设计等方面开展研究,研发一款新型助力装置。该装置通过基于人体工学的集成优化设计实现了轻量化(≤5 kg)、小型化(390 mm×130 mm ×140 mm)结构设计要求;创新地采用基于单手操作的快速挂接结构,实现了面向市面大部分手动轮椅的高适配要求和5 s内快速装卸的易操作要求;基于使用环境的动力学分析与设计实现了室内外行进20 km的续航里程要求;通过手环控制器和摇杆控制器的多元控制方式开发,实现了不同驱动人员对助力装置启停控制和速度控制的简易化操作要求。
关键词:人体工学;助力装置;手动轮椅;快速挂接结构
中图分类号:U463.46文献标志码:A文章编号:1671-5276(2024)03-0074-05
Research on Manual Wheelchair Assist Device Based on Ergonomics
Abstract:In response to the labor-intensive implementation of non electric wheelchairs for disabled and semi disabled elderly people in China, a new type of assistance device, in comprehensive consideration of users' functional needs, usage environment, and feasible technical support, is developed in terms of power system reliability theory calculation, ergonomic design and intelligent control design. Through the integrated optimization design based on ergonomics, the device has realized lightweight (≤ 5 kg) and miniaturization (390 mm×130 mm×140 mm) as required by structural design. By innovatively adopting a quick attachment system based on single handed operation, the high adaptability requirements for most manual wheelchairs on the market and the easy operation requirements for quick loading and unloading within 5 seconds is achieved. With dynamic analysis and design based on usage environment, a range requirement of 20 km for indoor and outdoor travel is met. A diversified control method using a wristband controller and a joystick controller is developed to simplify the operation of start stop control and speed control of the power assist devive for different drivers.
Keywords:ergonomics; assist device; manual wheelchair; quick attachment structure
0 引言
据第四次中国城乡老年人生活状况抽样调查结果显示,我国失能、半失能老年人约占老年人口的18.3%[1]。由于健康意识较弱以及无法有效使用辅助器具,我国失能、半失能老年人长期卧床比例较高,生活质量相对较低[2]。
轮椅是扩大肢体障碍者移动范围和提高生活质量的重要手段。电动智能轮椅是各大厂商着力研发的热点[3-4]。但是,目前多数失能、半失能老人存在认知能力明显下降以及上肢自主驱动轮椅能力不足等问题,仅能使用手动轮椅,而加载于手动轮椅上的助力装置有助于完成轮椅在手动驱动与电动驱动之间的切换,满足室内与室外轮式移动的双重需求。
近年来国外轮椅助力产品因其小巧与灵活性设计逐渐取代电动轮椅成为研发热点[5-8]。新品研发主要方向有后置驱动轮式、外置支架式以及大轮轮毂电机式三类结构。其中后置驱动轮式装卸简单,但是转向时会产生侧向阻力。外置支架式轮椅转向控制快速直接,但是体积较大,装卸不便。大轮轮毂电机式控制灵活,不增加多余配件,但是只能用于部分具有大轮快拆结构的轮椅,且价格昂贵。
综上,考虑到我国老人使用的轮椅大多为普通折叠轮椅,且护理人员多为体力与动手能力有限的同龄老年人,更适合以后置驱动轮式结构作为研发方向,故设计一款新型助力装置,使其可以直接附加在市面大部分折叠轮椅上使用,解决失能、半失能老龄群体使用手动轮椅时出现的推行费力问题。
1 助力装置整体设计原则
助力装置主要包括主体结构(外壳、轮子、电机、电池等)、挂接装置(适配器、挂接接头等)以及控制方式(手环控制、摇杆控制)。助力装置整体设计除了满足动力、续航等方面的基本要求外,还应符合人体工学设计,同时具备轻巧美观、装卸快捷和易于操控等特点。
1.1 主体结构
基于人体工学设计理念,对助力装置进行轻量化、小型化设计。电机和电池分别依据理论计算进行匹配,在保证动力与续航的前提下尽可能轻巧。此外,对助力装置手把位置进行设计,使其能够实现自平衡,在提取和放置时无需手腕增加额外握力。
1.2 挂接装置
挂接装置主要包括适配器(连接块、挂接小轴)与挂接接头。适配器应当可以加装在大部分现有手动轮椅上并且不影响轮椅折叠放置;挂接接头应连接可靠并且装卸方便。
1.3 控制方式
根据受众群体需求差异给出不同的控制方式。针对老人自主驱动轮椅的情况,采用手环控制方式,手环可佩戴于老人手臂,便于自主操作助力装置;针对护理人员驱动轮椅的情况,采用摇杆控制方式,控制器应安装在轮椅后方的手推把部位,方便护理人员操作。
2 主体结构设计
2.1 助力装置人体工学设计
基于人体工学设计理念,对助力装置外形结构采用双圆形设计,使助力装置具有轻巧便携、握把舒适等优点。
轮椅底部空间比较小,为了保证不占用后方护理人员的行走空间,壳体内部结构应力求紧凑,内部结构设计如图1(a)所示,整体尺寸控制在390 mm×130 mm ×140 mm;助力装置壳体材料选择高强度阻燃尼龙,兼具轻质与安全;挂接头对强度要求较高,选择铝合金材质,整体质量控制在5 kg,可满足绝大部分人的臂力。此外,为保证将助力装置提起后使其保持自平衡,在外形设计时将手把位置设置于与助力装置质心重合位置。最终实物如图1(b)所示。
2.2 轮毂电机功率计算
如图2所示,将被护理人员、轮椅及助力装置作为一个整体进行受力分析,助力装置与轮椅前进方向夹角为A,设定为4.8°,地面坡度角度为B,设定为40°。
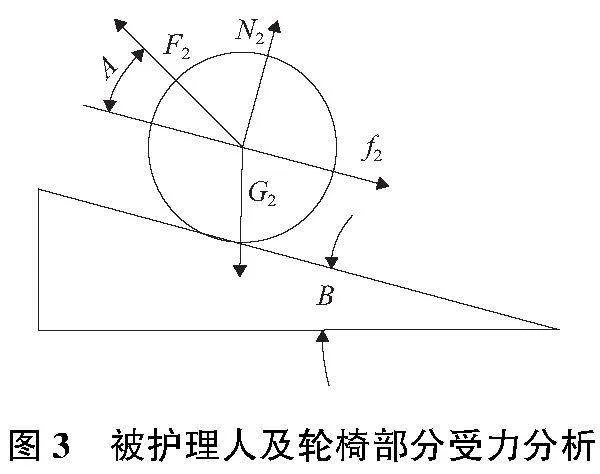
单独分析被护理人员与轮椅部分(不含助力装置),如图3所示。助力装置对被护理人员及轮椅部分作用力为F2,当匀速向前运动时,由动力学定律可得:
N2=G2×cosA/(cosA+μ1×sinA)(1)
F2=μ1×G2/(cosA+μ1×sinA)(2)
式中:N2为轮椅部分正压力;G2为轮椅部分重力;μ1为滚动摩擦因数,设定为0.02(橡胶轮胎与干燥沥青路面)。
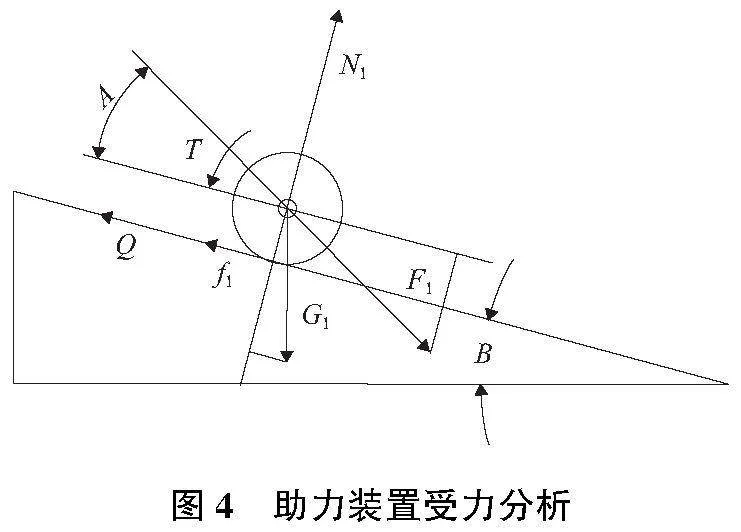
如图4所示,分析助力装置部分。轮毂电机输出转矩为T,整体机械效率为η,使轮子克服滚动摩擦力f1开始滚动,并产生向后滑动趋势,从而使轮子受到地面产生的静摩擦力,也就是向前驱动力Q,驱动轮受到被护理人及轮椅部分反作用力F1。匀速运动时,由动力学定律可得:
N1=G1×cosA/(cosA+μ1×sinA)(3)
F1=μ1×G1/(cosA+μ1×sinA)(4)
进而得到:
Q=F1×cosA-f1(5)
T=(f1+Q)×R/η(6)
式中:G1为助力装置组件重力;R为助装转置驱动轮半径。
即电机输出转矩为
T=(f1+Q)×R/η (7)
为了保证安全稳定,设计助力装置行进速度为5 km/h,电机转速为n,则需要电机功率为
P=T×n×1 000/9 550(8)
经计算,当轮毂电机功率为150 W时,可以满足动力需求。
2.3 电池续航与使用寿命计算
根据助力装置使用环境和使用要求,同时考虑电压、电流、质量体积等参数要求,电池优先选择使用标准型号18650锂电池组成的电池组,采用6串4并的方式,则串联电压为22.2 V~25.2 V;并联电池容量为8.8 Ah(每个18650锂电池电压范围为3.7 V~4.2 V,电池容量2.2 Ah)。根据运动学定律,功率、摩擦力、速度、机械效率关系如下:
P=U×I=F×v/η1(9)
I=F×v/(η1/U)(10)
式中:F=M×g×μ1=100×9.8×0.02=19.6 N;v=1.39 m/s;U=24 V。
取η1=0.7,代入式(10),得I=1.62 A。
电池容量Ce=8.8 Ah,假设电池效率为η2=80%,则
可放电时间为t=(Ce×η2)/I=(8.8×0.8)/1.62=4.35 h;
理论续航里程s=v×t=5×4.35=21.75 km。
电池的使用寿命根据电池厂电芯的规格书,电芯的循环次数为不低于600次。根据测试,电池在5 km/h的速度下,放电时间为4 h;电池的总放电时长h=600×4=2 400 h。
按照计划每天在5 km/h的速度下,平均出行时间为2 h,平均出行距离为10 km,则电池能够使用1 200 d,即预测电池的使用寿命是3.28 y。如果行驶速度低于5 km/h,电池的放电时间会加长,使用寿命也会延长。
通过选择合适的轮毂电机与电池,整体质量控制在5 kg,可满足绝大部分人的臂力。
3 挂接装置设计
基于稳定性的要求,助力装置适配器包括连接块和挂接小轴,二者将采用螺钉抱闸的形式固定于轮椅下部折叠“X”型支架的单根支架上,从而不影响“X”型折叠轮椅的折叠功能,如图5所示。
挂接结构采用弹性锁扣的原理,将挂接头下方开口加大到和直径一致,在开口的下方增加弹性锁销结构,这样可以在圆周任意角度进行挂接。挂接时,单手握住助力装置手柄,将半圆形开口的挂接头直接挂接在适配器的固定小轴上,挂接头开口下方的弹性锁销自动弹出,和上方半圆形形成封闭锁扣,防止助力装置行进过程有颠簸而造成挂接头从小轴上脱落,提高整套装置的挂接安全性和可靠性。拆卸时,单手握住助力装置手柄的同时,食指往后拉动扣环,即可打开自锁锁销,手柄上抬,助力装置即可从小轴上拆下。具体结构如图6所示。
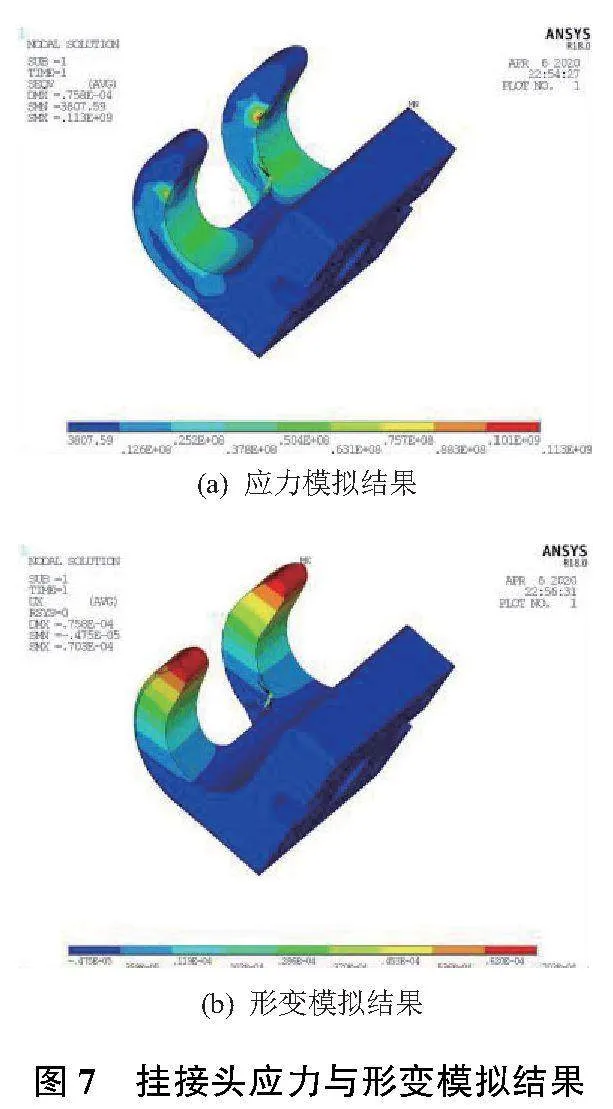
由于挂接结构中挂接头受力较大,选择LY11铝合金材料并且进行加厚处理。采用ANSYS对挂接头进行可靠性分析,分别在两边的挂接爪处施加400 N拉力(合计拉力为800 N,为实际拉力的5倍),ANSYS数值模拟结果如图7所示。
模拟结果表明在800 N的拉力下,挂接头应力最大处应力值为50.4 MPa,强度满足要求(LY11铝合金材质的抗拉强度σb≥370 MPa;屈服强度σ0.2≥215 MPa)。最大形变位于挂接爪端部,变形值为0.64×10-4 mm,满足设计变形量要求。在后续的样机测试中,该挂接头没有出现拉伸变形现象。同时进行的拆装时间测试中,3个不同年龄段多组次拆装用时均值结果如图8所示。结果显示平均安装时间(3.46±2.42) s,平均卸除时间(3.54±4.84) s。对于不同年龄群体,均可实现快速装卸。
4 控制方式设计
4.1 手环控制器设计
手环控制器为佩戴于轮椅使用者手腕部的控制装置,利用手环检测使用者手部运动数据,与助力装置进行数据通信,建立动作识别模型,并将该模型算法载入驱动装置的中央处理器,中央处理器进行判断识别开启和关闭助力辅助装置。多重手势识别,采用惯性传感方案,支持单击、双击、三击。
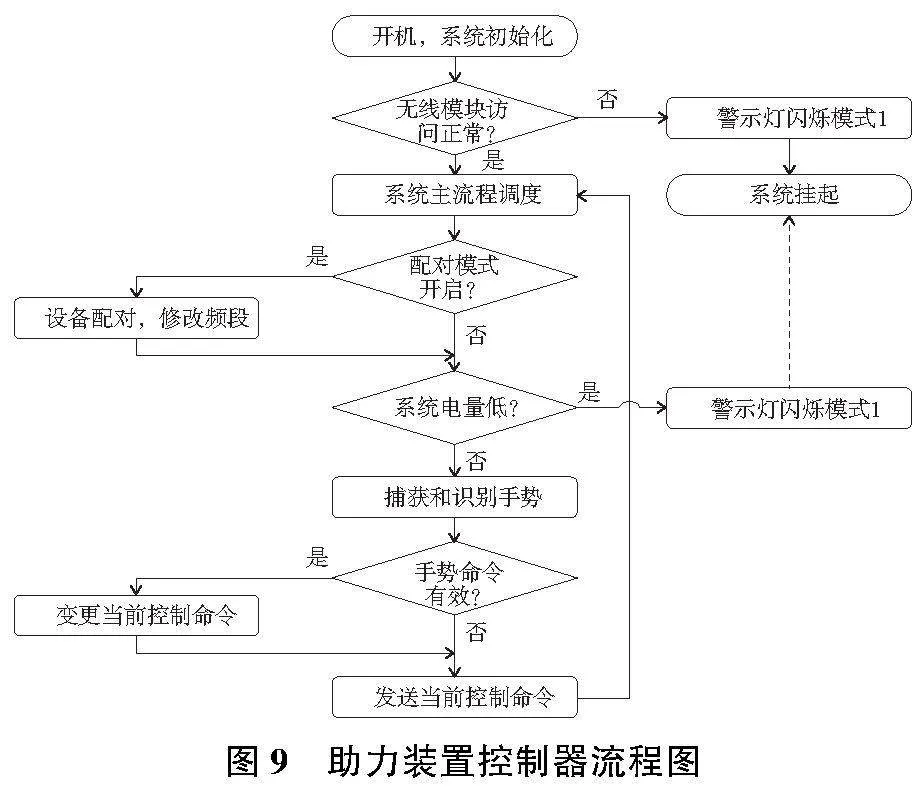
系统软件(固件)完成整体任务调度,包括手势识别算法、电源管理、控制通信、上位机状态管理等,同时完成各种外设的管理。工作流程如图9所示。
手环控制器硬件主要包含MCU,运动采集芯片,无线通信芯片和电池。
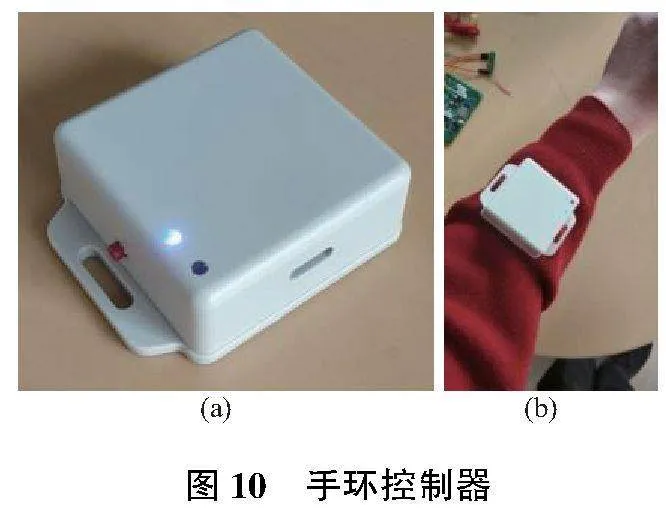
手环控制器为可穿戴设备,要求轻巧便携,因此采用ST公司超低功耗的STM32L151CCT6芯片作为MCU、Invensense公司的MPU6050芯片作为运动采集芯片、Si24R1模组作为无线通信芯片。手环控制器电池采用耐高温锂聚合物电池,容量为700 mAh。手环控制器佩戴在轮椅乘坐人的手臂上,通过对同一个按钮的复用来完成开机、关机以及设备配对等基本操作,如图10所示。
4.2 摇杆控制器设计
摇杆控制器为护理人员使用,一般安装在轮椅后方手推把部位,要求满足护理人员在轮椅后方推行双手握住轮椅手推把时,在手掌不能脱离手推把的要求下,通过拇指推动摇杆实现助力装置的速度控制和启停控制。
摇杆控制器采用无线通信模块完成和主控制器的数据通信,上面有速度控制和启停的摇杆,在摇杆外侧设置有显示器和电源启动键,显示器具备驱动电池电量和遥控电池电量显示、驱动轮速度显示、高低速显示,如图11所示。
5 结语
1)本文基于人体工学,实现了助力装置的轻量化和小型化设计,最终质量控制在5 kg以内,适应大部分人的手臂力量;外形尺寸控制在390 mm×130 mm ×140 mm,在国内外同类产品中是最小的,减小了空间占用,便于运输和携带;此外,对助力装置手柄进行了人体工学设计,使其能够实现自平衡,在提取和放置时无需手腕增加额外握力。
2)针对轮椅使用环境和人员情况,基于动力学分析,确定了助力装置电机功率为150 W,电池续航为20 km时,可满足助力需求。
3)ANSYS有限元计算表明助力装置LY11铝合金挂接头在使用中的应力和变形均在安全范围内,满足助力装置稳定性要求。
4)分别研发了轮椅使用者佩戴的手环控制器和护理人员使用的摇杆式控制器,可通过简易化操作实现对助力装置的启停控制和速度控制。
参考文献:
[1] 钱睿晗. 失能老人抑郁症状现状及影响因素分析——基于社会支持视角研究[J]. 运筹与模糊学, 2023, 13(5): 4913-4925.
[2] 李晴,张娜,信博,等. 老年失能精准防控体系建设发展的SWOT-PEST分析[J]. 中国卫生事业管理,2024,41(3):350-354.
[3] 刘虎,孙冰寒,宗思雨,等. 浅谈爬楼电动轮椅的设计研究现状及展望[J]. 中国设备工程,2024(8):128-129.
[4] 伏梓栋,尚文. 一种智能轮椅设计[J]. 现代仪器与医疗,2023,29(4):41-45.
[5] WONG S,MORTENSON B,SAWATZKY B. Starting and stopping kinetics of a rear mounted power assist for manual wheelchairs[J]. Assistive Technology,2019,31(2):77-81.
[6] KHALILI M,TAO T X,YE R L,et al. Towards the development of a learning-based intention classification framework for pushrim-activated power-assisted wheelchairs[C]//2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR).Toronto,ON,Canada:IEEE,2019:95-100.
[7] JANG D J,KIM Y C,HONG E P,et al. Development of power-assist device for a manual wheelchair using cycloidal reducer[J]. Applied Sciences,2023,13(2):954.
[8] FLOCKHART E W,MILLER W C,CAMPBELL J A,et al. Evaluation of two power assist systems for manual wheelchairs for usability,performance and mobility:a pilot study[J]. Disability and Rehabilitation.Assistive Technology,2023,18(8):1290-1302.
[9] CUERVA V I,ACKERMANN M,LEONARDI F. Performance of impedance control-based strategies in power-assisted wheelchairs:a predictive simulation study[J]. Frontiers in Neurorobotics,2022,16:805835.
猜你喜欢
现代纺织技术(2024年12期)2024-12-31 00:00:00
汽车观察(2021年4期)2021-11-23 17:10:20
艺术科技(2019年5期)2019-07-23 10:13:36
智富时代(2019年3期)2019-04-30 11:11:14
设计(2018年13期)2018-11-27 06:58:44
科教导刊·电子版(2018年21期)2018-09-17 05:36:16
知识窗(2017年12期)2018-01-02 09:18:34
科技与创新(2016年3期)2016-03-15 02:55:49
家具与室内装饰(2015年9期)2015-12-22 00:48:00
艺海(2014年6期)2014-07-07 19:40:14
