
基于机器视觉的镍板材表面缺陷检测研究
2024-08-31 00:00:00李建华刘广鹏赵正天雷春丽
机械制造与自动化 2024年3期
关键词:机器视觉



摘 要:针对电解法提纯镍板材表面出现的质量缺陷,设计改进Canny的缺陷检测方法。利用双边滤波使图像去噪保边,研究一种增强梯度的掩模并融入Sobel中形成双层卷积核,增强缺陷边缘梯度,弱化缺陷内部及背景区域的梯度。采用分水岭算法代替非极大抑制与形态学边缘连接算法进行边缘细化。实验结果表明:本算法对镍板缺陷的检测效果优于经典算法和其他几种改进算法。
关键词:机器视觉;表面缺陷检测;改进Canny;最大熵
中图分类号:TP391;TB302.5文献标志码:A文章编号:1671-5276(2024)03-0066-04
Nickel Plate Surface Defect Detection Base on Machine Vision
Abstract:To handle the quality defects on the surface of nickel sheet, a defect detection method combining adaptive fractional differentiation and improved Canny algorithm is proposed. Bilateral filtering is used to denoise and preserve the edge of the image. A gradient-enhancing mask is designed and integrated into Sobel to form a double-layer convolution kernel, enhancing defect edges gradient and weakening the gradient inside the defect and in the background area. The watershed algorithm is applied to replace the non-maximum suppression and the morphological edge connection algorithm for edge refinement. The experimental results show that the detection effect of the proposed algorithm on nickel plate defects is better than the classical algorithm and some other improved algorithms.
Keywords:machine vision; surface defect detection; improved Canny; maximum entropy
0 引言
镍是我国钢铁、电池、航天等领域使用的重要有色金属,常用提纯方法为电解法。电解槽作为电化学反应的母槽,镍板在其电解液中生长速度不均匀及夹杂气泡,导致板材表面形成大量圆球状凸起缺陷。这些缺陷会对后续码垛包装工序、下游销售及板材质量造成影响。基于此,对电解后的板材进行缺陷检测尤为必要。
目前,镍板材的缺陷检测基本采用人工目视检测法,而利用机器视觉技术对此种板材进行缺陷检测的研究与应用相对较少。对于其他相似的表面缺陷检测问题,黄梦涛等[1]通过改进Canny算子,将最大熵和Otsu算法相融合,实现锂电池极片的表面缺陷检测,该算法对少量缺陷可获得较好效果。郑安义等[2]提出了芯片的气泡瑕疵缺陷检测算法,利用均值切块和加权融合进行图像光照补偿和增强,最后进行最大熵的阈值分割,该算法检测芯片气泡缺陷取得了不错的效果。刁子健等[3]利用改进的Canny算法进行气泡检测,与Canny算子相比获得了更好的连接性。
上述算法只对部分缺陷检测效果较好,其他部分检测很难达到理想效果,故具有一定局限性。本文提出了一种改进的Otsu-Canny算法进行表面缺陷检测。为验证算法的效果,与其他算法进行了对比实验,结果显示本文算法具有良好的适用性。
1 表面缺陷检测问题分析
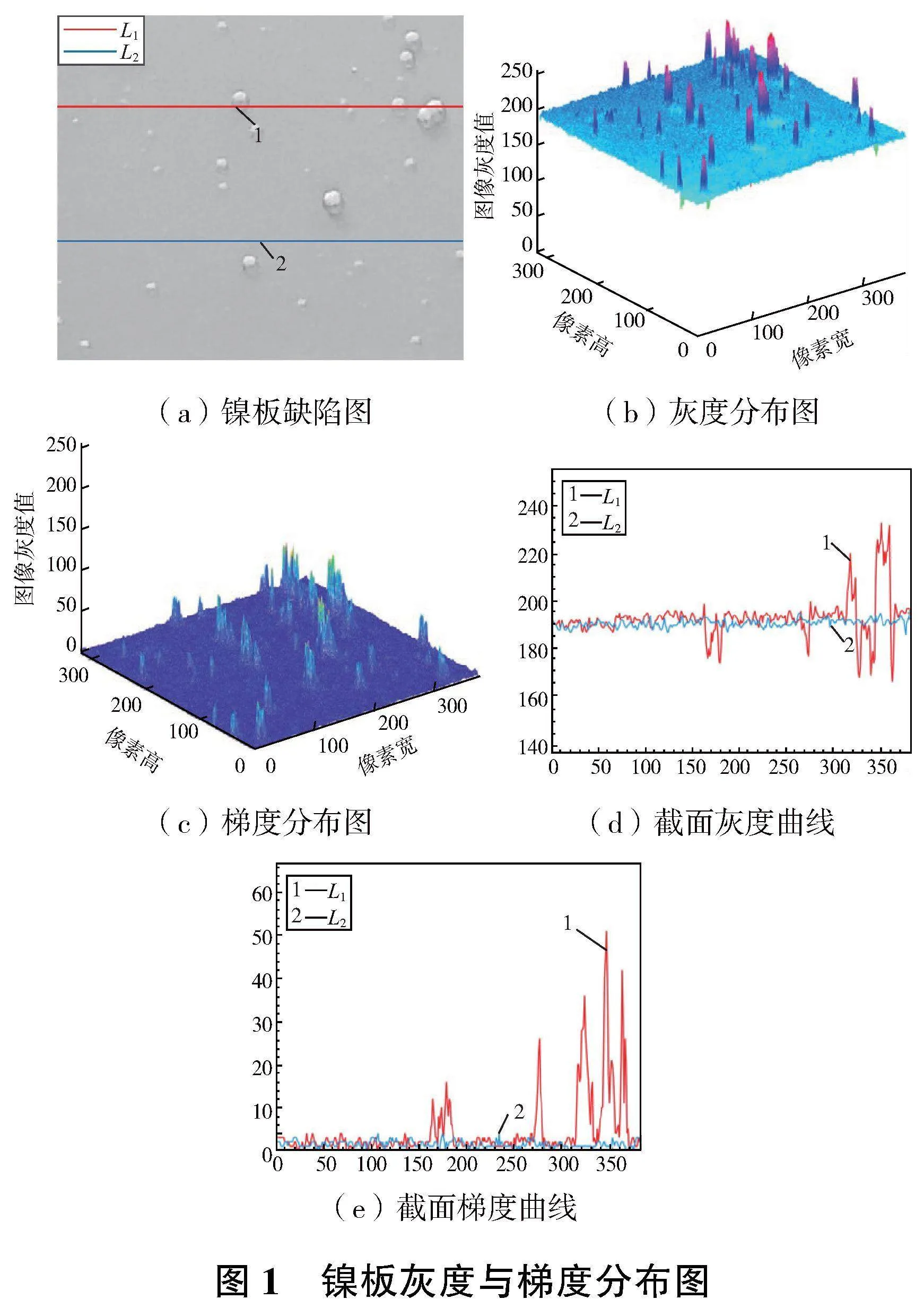
镍板缺陷个体微小、对比度偏低、缺陷数量及分布区域差异较大。图1为镍板灰度和梯度分布。由分布图可知,图像的灰度分布在平滑和缺陷区域之间会产生一个差值;图像梯度在缺陷区域会产生阶跃性突变。为更直观清晰地观察图像灰度及梯度变化情况,选取两条直线分别通过平滑和缺陷区域,直线位置如图1(a)所示;由图1(d)、图1(e)曲线可知,平滑区域的曲线变化在一个较小范围内波动,缺陷区域的每一缺陷灰度和梯度大小不一,在边缘检测时,易造成误检和漏检现象。
2 改进Canny的表面缺陷检测
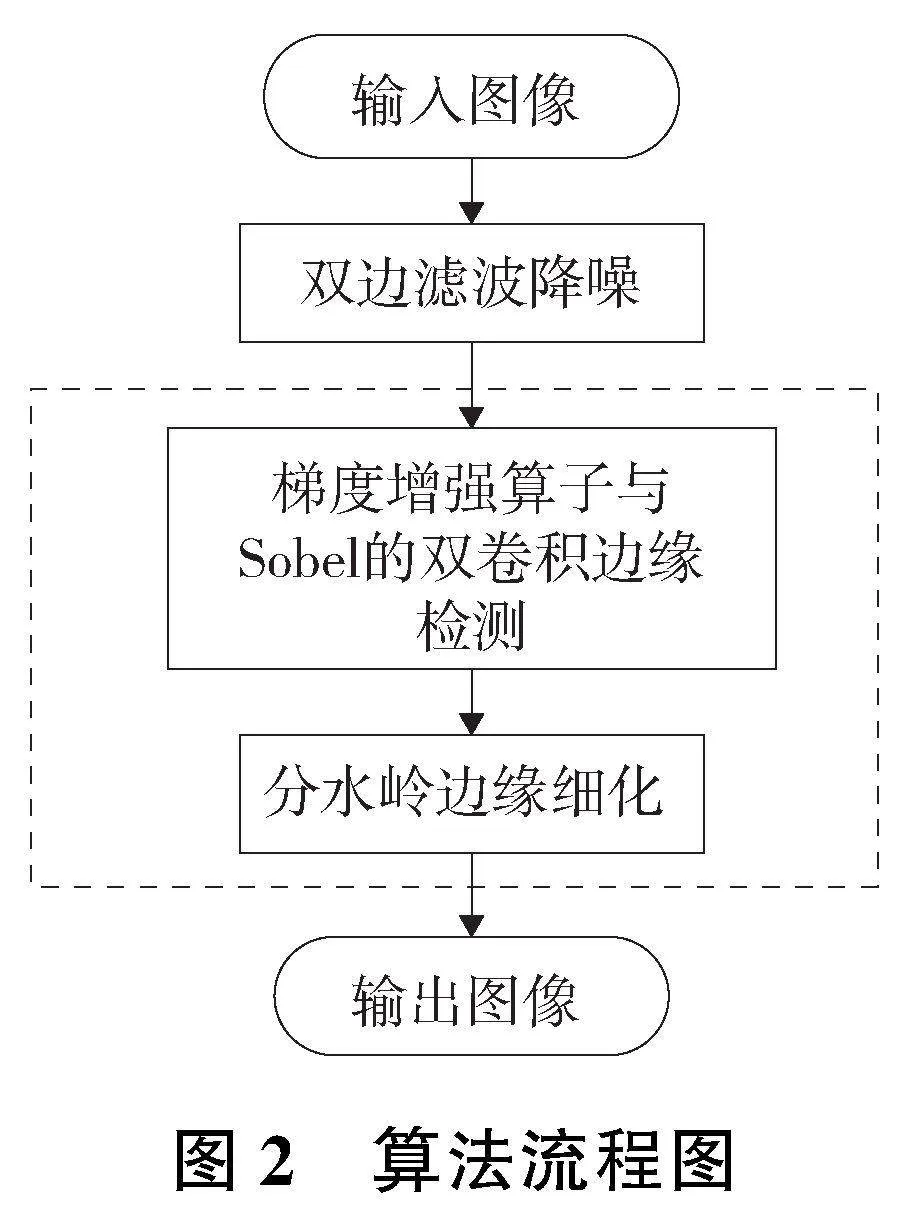
Otsu-Canny是在经典Canny算子的基础上加入最大类间方差实现自适应阈值[4]。镍板缺陷边缘及内部梯度值大小不一,Otsu-Canny算法检测时会产生误判。针对传统算法的不足,本文提出以下改进:将高斯滤波改为双边滤波避免造成缺陷边缘模糊;提出了一种增强边缘梯度的方法,结合最大熵阈值,融入Sobel算子中,强调缺陷边缘;分水岭算法代替非极大值抑制等方法去除冗余,细化边缘。算法基本流程如图2所示。
2.1 双边滤波降噪
Canny采用的高斯滤波方法对此类对比度偏低、前景目标小而多的图像效果不理想,图像缺陷模糊。本文采用双边滤波方法,使图像在去噪的同时一定程度上保留了图像边缘信息。
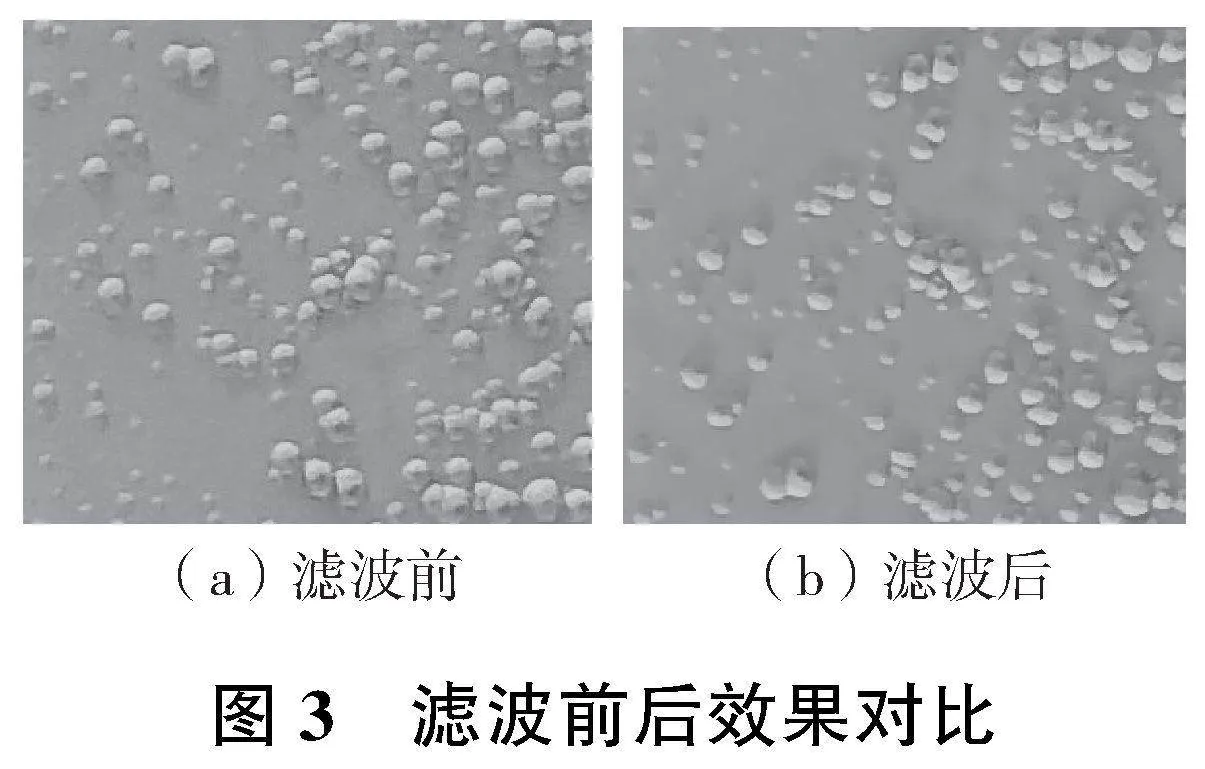
双边滤波[5]在考虑高斯滤波空间域信息的同时加入像素值域权重,形成双重权重滤波。平坦区域内,邻域内像素灰度值变化不大,空间域为主要权重,在边缘区域,邻域内像素有较大梯度,像素灰度值为主导权重。双边滤波前后的图像效果如图3所示,达到了去噪保边的作用。
2.2 图像边缘检测与细化
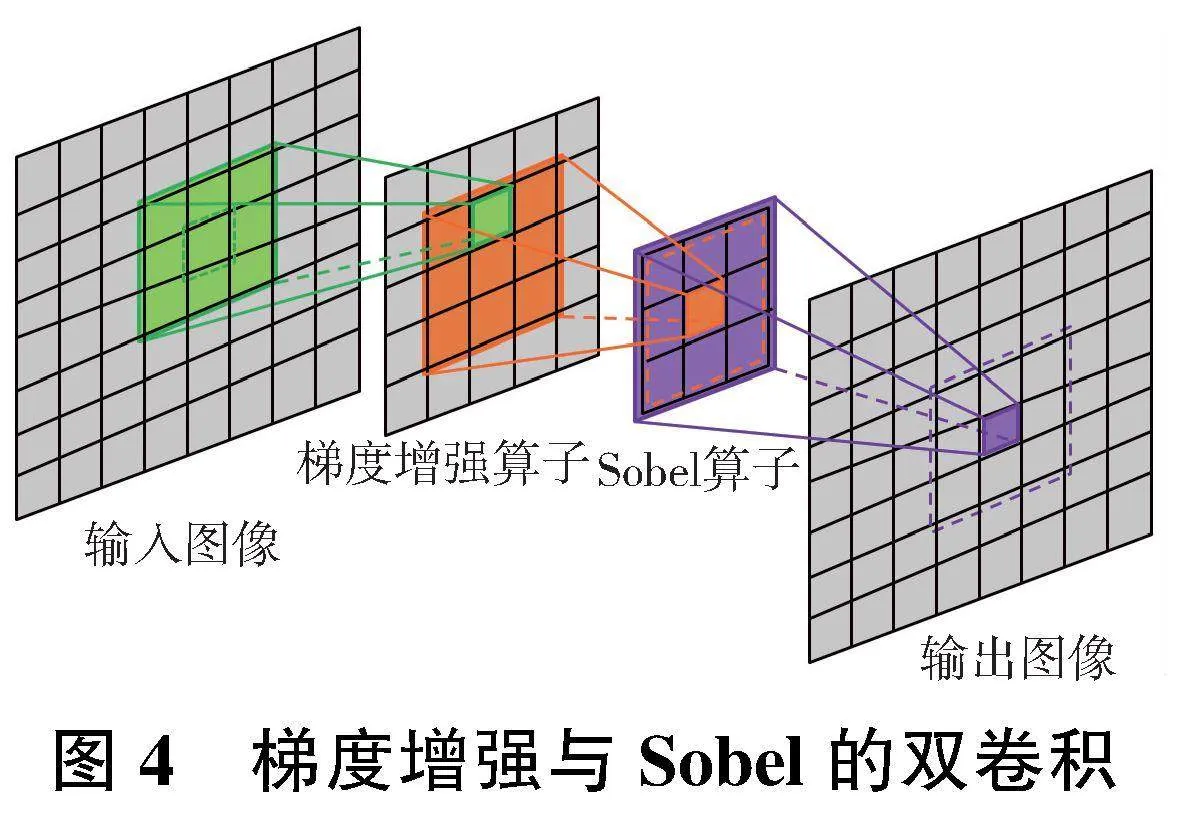
1)梯度增强与Sobel的双卷积算子
梯度增强算子是借鉴注意力机制的思想,拉伸目标与背景的灰度差值。图像经梯度增强算子与Sobel算子进行双卷积操作完成梯度边缘检测,如图4所示。此方法能够突出前景的目标区域,模糊背景区域,增强了边缘的灰度突变,使输出的梯度图更能强调边缘,弱化背景及前景内部等无用区域。
本文提出的梯度增强表达式如下:
式中:*表示卷积操作,其左为预处理后的图像f(x,y),中间为梯度增强算子,右为Sobel算子;增强梯度的算子中,sigmoid为权重归一化激活函数;s表示卷积核区域;σ表示卷积核的标准差;g0为卷积核中心位置灰度值;在激活函数参数中,k为高斯核函数,代表卷积核到中心位置的距离权重;t为目标与背景的边界阈值,采用最大熵获取;g为梯度增强算子对应的图像内各像素的灰度值。图像经改进后的卷积操作能够较好地获得边缘梯度图像,减少了其他边缘的干扰,效果如图5所示。
2)分水岭算法的边缘细化
改进后的Sobel算法获得的梯度图经阈值后得到的边缘较宽,为去除边缘冗余、采用分水岭算法[6]代替非极大值抑制与边缘连接方法细化边缘。
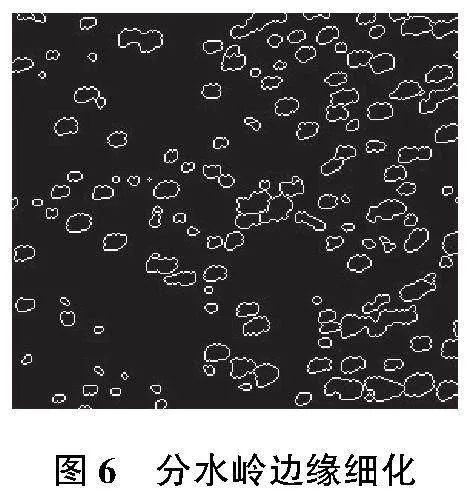
进行分水岭细化边缘前,需找出图像标记点进行注水。本文缺陷边缘为闭合轮廓,以边缘内孔洞作为注水点,以梯度图的边缘轮廓作为泛水区域,找出边缘极值点进行边缘细化。细化效果如图6所示,与非极大值抑制去除冗余,后进行形态学边缘连接相比,避免了出现连接中断和存在伪边缘现象。
3 实验结果分析
为验证本算法的有效性,实验所使用的硬件平台配置为AMD R5-4600H 3.00GHz 16GB内存 4.00GB RAM,软件平台为C++联合OpenCV,Matlab2020b,Windows10操作系统。通过实验对本文方法进行验证,并将本文提出的算法与经典算法及现有文献算法进行比较分析。
3.1 图像去噪效果对比
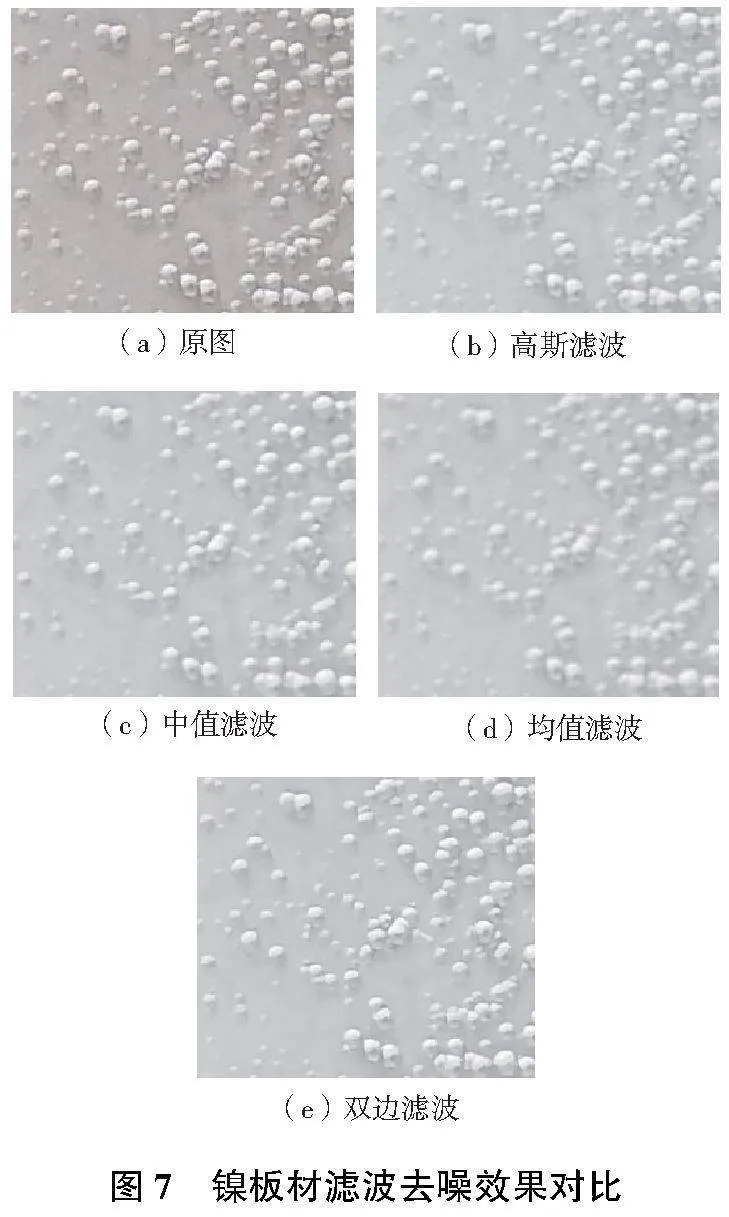
将本文采用的双边滤波去噪算法与其他几种经典滤波方法作比较,如图7所示。对比可知,高斯滤波和均值滤波边缘清晰度较差;中值滤波部分干扰噪声无法去除;双边滤波在去除平滑区域干扰噪声的同时,较好地保留了缺陷边缘区域。
为更客观评价以上几种滤波对镍板图像的去噪能力,本文利用峰值信噪比(PSNR)作为去噪性能评价指标。峰值信噪比越大,降噪效果越好。由表1可知,随机选取的几张镍板图像经滤波后,双边滤波的效果要好于其他几种滤波算法。
3.2 缺陷检测效果对比
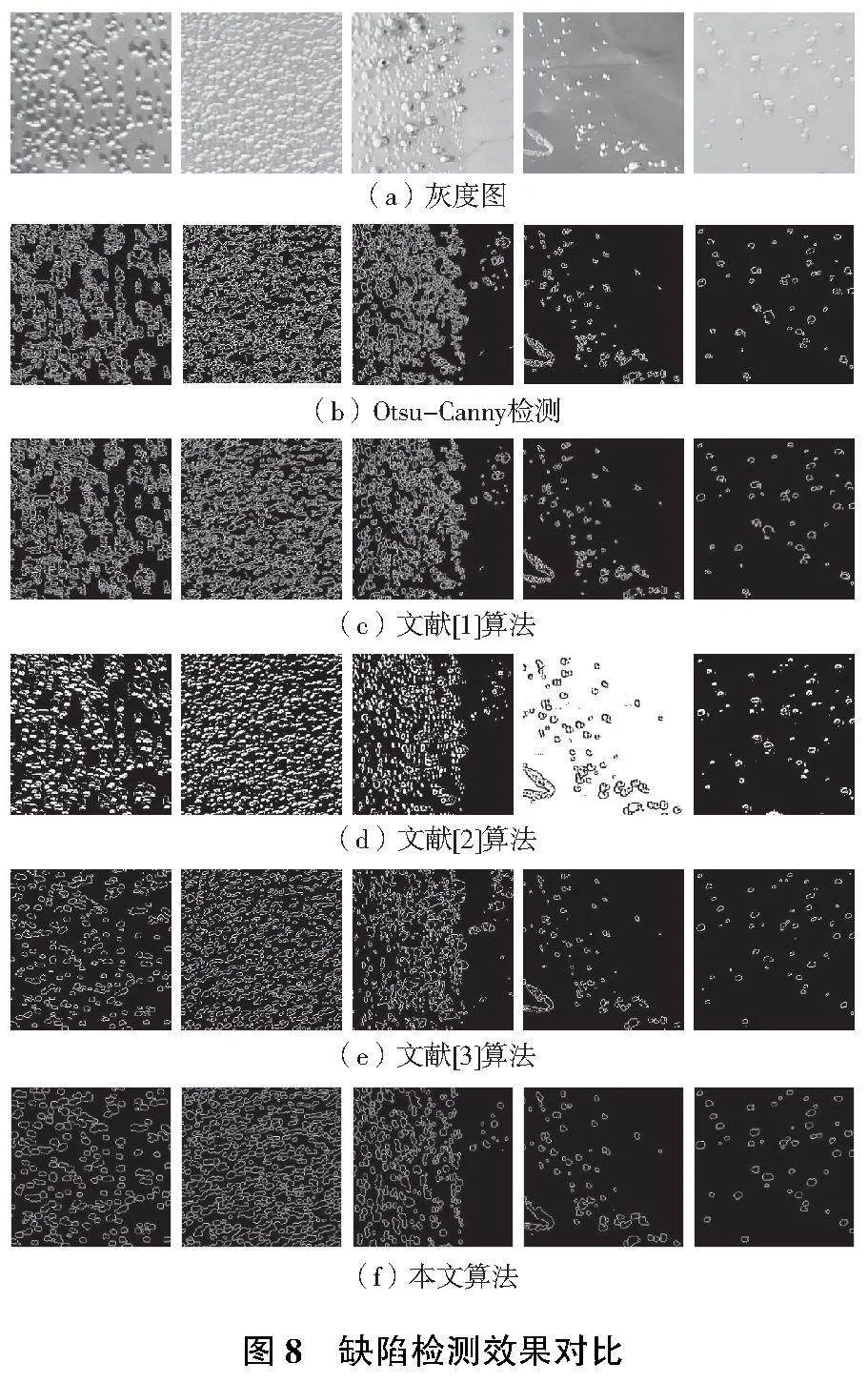
为验证本文提出的边缘检测算法的有效性,现选取几种典型的镍板缺陷分布,将常用的几种经典缺陷检测算法及现有文献提出的算法与本文方法进行比较分析,如图8所示。由于单个缺陷相对于镍板整体而言非常微小,为便于观察比较,取局部灰度图,如图8(a)所示。图8(b)为Otsu-Canny边缘检测算法,此算法存在一定伪边缘和断连接现象;图8(c)为文献[1]算法,在镍板检测中效果稍好于Canny算法,但提升效果不明显;图8(d)的文献[2]算法能够检测出镍板缺陷的二值图,并取得不错的效果,但会出现如第4张的翻转现象;图8(e)为文献[3]算法,该算法与本文算法检测效果相似,但会出现边缘中断现象,连接性不如本文算法,此外该方法第3张图像检测失败;图8(f)为本文算法效果,相较于上述算法,本文能够更好地检测出镍板缺陷,同时获得了较好的效果。
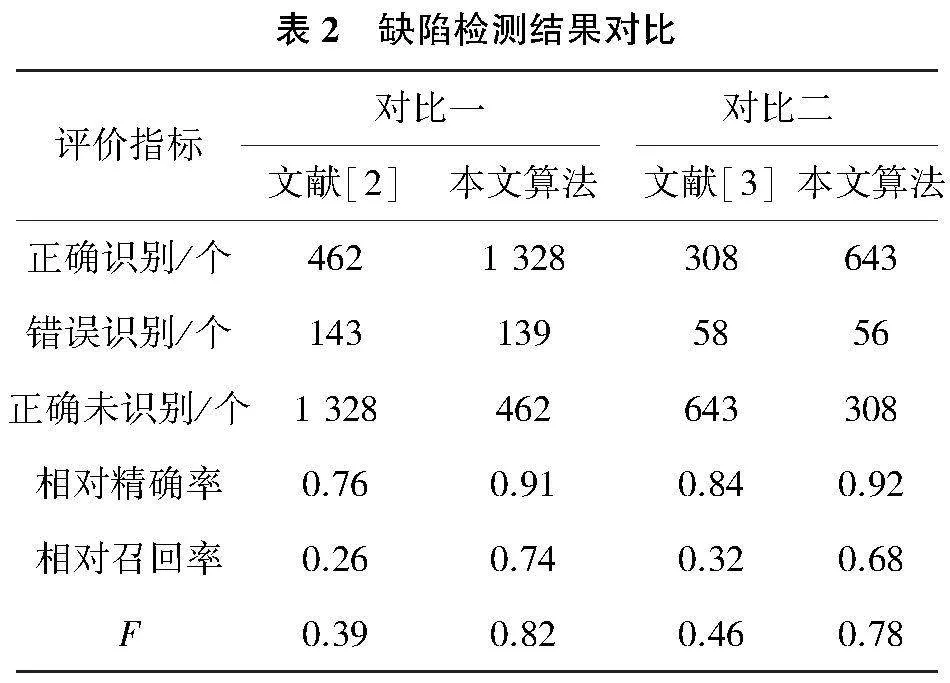
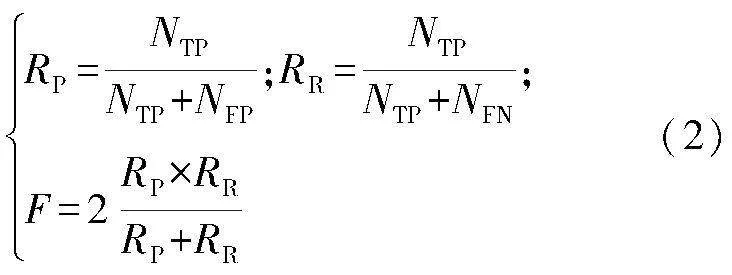
为更客观评价本文算法,减少样本特殊性对检测结果的影响,抽取100张镍板缺陷图像作为实验对象进行比较。精确率P、召回率R及F值(F-Score)为评估边缘检测效果的常用指标[7]。多数镍板缺陷数量过多,采用人工标注获取真实缺陷工作量巨大,为对比文献与本文算法的检测效果,提出了相对精确率RP、相对召回率RR及F值作为评价指标。不同于全部比较每一缺陷的检测状况,现只统计文献与本文算法检测结果相异部分,即文献与本文算法交并之差,进行两两对比,相关表达式如下:
式中:NTP代表交并之差后正确识别缺陷的个数;NFP代表错误识别缺陷的个数;NFN表示正确未被识别缺陷的个数。两算法相对精确率和相对召回率较高者,缺陷误检率和漏检率越低;F值是精确率与召回率的均衡值,越高检测效果越好。将文献[2]、文献[3]分别与本文算法对比,统计随机选取100张镍板图像中的正确识别、错误识别及正确未识别缺陷总个数,计算RP、RR、F值如表2所示。对比可知,本文检测算法优于其他方法。
4 结语
本文针对镍板材图像的缺陷问题,以Otsu-Canny边缘检测为基础,设计了增强梯度的算子与Sobel结合,利用最大熵阈值,实现边缘检测,提出了分水岭的边缘细化。将该算法应用于镍板材缺陷检测。实验结果表明:本算法检测缺陷效果优于其他经典算法及几种现有文献算法,对镍板缺陷检测具有一定的参考与应用价值。在后续工作中,需继续改进该方法,提高缺陷识别率,同时可以考虑将该算法移植到电解铜等其他具有相似缺陷的有色金属检测中。
参考文献:
[1] AMAR K B, RICARDO A S, INGARAO G, et al. Single point incremental forming:an assessment of the progress and technology trends from 2005 to 2015[J]. Journal of Manufacturing Processes,2017,27:37-62.
[2] YOSHIHARA S,MAC DONALD B,HASEGAWA T,et al. Design improvement of spin forming of magnesium alloy tubes using finite element[J]. Journal of Materials Processing Technology,2004,153/154:816-820.
[3] 郝用兴,杨功正,刘亚辉,等. TA1板单点渐进成形壁厚变化规律的数值模拟研究[J]. 制造技术与机床,2022(1):89-93.
[4] 苏春建,赵栋,李广震,等. 多道次单点渐进成形多参数交互影响[J]. 塑性工程学报,2022,29(9):25-31.
[5] 刘炫,李鹏程,陈怡霖,等. 板料多道次渐进成形轨迹规划与生成研究[J]. 黑龙江科学,2021,12(24):106-108.
[6] KWIATKOWSKI L,MELSHEIMER O,WENZEL S,et al. Experimental investigation of tool path strategies for incremental necking-in[J]. International Journal of Material Forming,2010,3(1):967-970.
[7] ANCELLOTTI S,FONTANARI V,SLAGHENAUFI S,et al. Forming rectangular tubes into complicated 3D shapes by combining three-roll push bending,twisting and rotary draw bending:the role of the fabrication loading history on the mechanical response[J]. International Journal of Material Forming,2019,12(6):907-926.
[8] 张奥强,杨晨. 一种微管单点成形有限元分析及成形机关键零部件承载分析[J]. 精密成形工程,2021,13(6):106-111.
[9] CUI Y D,LIU Z Y. C-Sets-based sequential heuristic procedure for the one-dimensional cutting stock problem with pattern reduction[J]. Optimization Methods and Software,2011,26(1):155-167.
猜你喜欢
软件导刊(2016年11期)2016-12-22 21:52:17
电脑知识与技术(2016年28期)2016-12-21 12:13:14
科技视界(2016年26期)2016-12-17 17:31:58
科技视界(2016年25期)2016-11-25 19:53:52
科技视界(2016年25期)2016-11-25 09:27:34
科教导刊(2016年25期)2016-11-15 17:53:37
软件工程(2016年8期)2016-10-25 15:55:22
科技视界(2016年20期)2016-09-29 11:11:40
科技视界(2016年6期)2016-07-12 09:12:40
科技视界(2016年15期)2016-06-30 19:03:30
