
倾转旋翼无人机过渡段控制策略研究
2024-08-28 00:00:00余帆黄一敏赵君宝
机械制造与自动化 2024年4期

















摘 要:针对倾转旋翼无人机过渡段的纵向控制问题,以某型倾转旋翼无人机为研究对象,综述了国内倾转旋翼机的发展趋势。利用Rotorlib软件建立倾转旋翼无人机的6自由度刚体模型;通过频域和时域对过渡段的特性进行分析,设计出过渡段的舵面操纵分配策略;对总距控制通道的控制结构进行设计。由于倾转旋翼在过渡过程中总距控制通道存在严重的耦合,根据动力学方程分析提出余弦分配的策略来改进耦合问题。通过仿真验证了余弦分配对于总距控制通道的耦合问题有明显的改善。
关键词:倾转旋翼无人机;6自由度刚体模型;过渡控制策略;余弦分配
中图分类号:V279 文献标志码:B 文章编号:1671-5276(2024)04-0230-05
Research on Transition Control of Tilt Rotor UAV
YU Fan, HUANG Yimin, ZHAO Junbao
(College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, China)
Abstract:Aiming at the longitudinal control problem of the transition section of tilt rotor UAV, taking a tilt rotor UAV as the research object, summarizs the development trend of tilt rotor UAV in China. The six degree of freedom rigid body model of the tilt rotor UAV is established by Rotorlib software. The control surface control allocation strategy for the transition section is designed by analyzing the characteristics of the transition section in the frequency domain and time domain. Due to the severe coupling of tilt rotor in the total distance control channel during the transition, a cosine allocation strategy is proposed to solve the coupling problem. Simulation results verify that the proposed strategy significantly improves the total distance control channe and coupling.
Keywords:tilt rotor UAV; six degree of freedom rigid body model; transition control strategy; cosine allocation
0 引言
无人倾转旋翼机是一种由动力驱动、依靠遥控飞行或者自主控制飞行的可垂直/短距起降的无人驾驶航空飞行器,能够根据飞行任务的需求携带多种任务设备,具备超视距飞行能力和通信能力,并且能够重复使用[1-2]。无人倾转旋翼机的机翼两端各安装一套可跟随短舱转动的旋翼推进装置,短舱可以在很大范围内完成倾转,并且固定在所需的方向,因此能够产生向上的升力或者前向推力[3-4]。
国内外对倾转旋翼机的轨迹设计也展开了大量的研究。郭剑东[5]为了使控制系统具有良好的鲁棒稳定性,使用H∞回路鲁棒控制来设计小型倾转旋翼机过渡阶段控制律,利用自适应技术实现各模式间的切换,并通过仿真证明其可行性。韩丽敏[6]提出了基于H∞理论的控制律设计方法来解决倾转旋翼机过渡阶段鲁棒性差的特点,并利用仿真验证其有效性。然而理论与实践不同,目前大部分先进的控制理论因复杂度高而无法实现工程化应用,甚至不能保证其稳定性,从而对飞行安全产生威胁。
本文以工程型号机的研发为基础,对其进行6自由度仿真模型的建立,从无人倾转旋翼机的动力学变化规律出发对其控制策略进行了研究,并且对其鲁棒性进行分析并提出改进策略,以此提高飞行品质以及系统的鲁棒性。
1 问题描述
1.1 研究对象描述
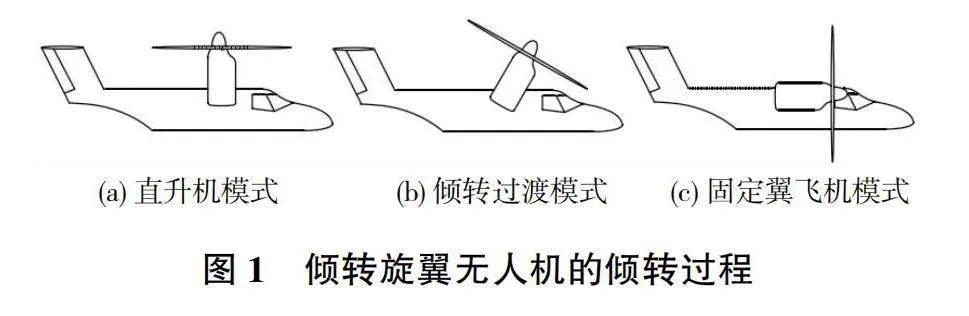
本文的研究对象来源于实验室与国内某研究所合作的倾转旋翼无人机项目。对象倾转旋翼无人机通过短舱机构自动向前倾斜完成倾转过渡过程,如图1所示。同传统直升机不同,直升机需要通过尾桨来抵消旋翼产生的反转矩,倾转旋翼机左右双旋翼产生的反转矩能够互相自行抵消[7]。该倾转旋翼无人机拥有两套操纵舵面,即旋翼操纵舵面和气动操纵舵面。旋翼舵面操纵量有总距、纵向周期变距,气动舵面操纵量包括升降舵、襟翼、方向舵[8]。图1所示为该飞行器在直升机模式时左右双旋翼通过总距来改变旋翼拉力。总距为旋翼的操纵舵面,改变总距相当于改变桨叶的迎角,原理是通过舵机带动拉杆以此来改变桨叶迎角使得总距发生变化,最终导致旋翼的拉力发生改变。
当倾转旋翼无人机进行倾转过渡时,随着旋翼的前倾,旋翼拉力的方向在纵向上的分量逐渐增大[9]。此时改变总距会同时影响纵向和垂向上的分力大小,如图2所示,存在严重的操作耦合,这会大大影响控制品质。
1.2 建模与特性分析
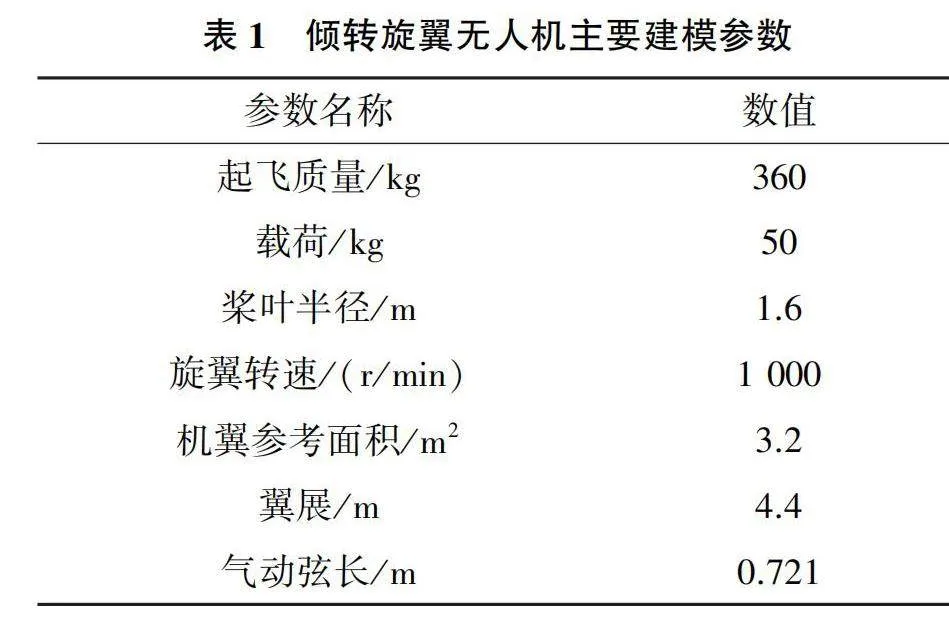
对象倾转旋翼无人机采用混合机体法建模,通过Rotorlib建模软件对倾转旋翼无人机的双旋翼进行建模,实时计算出旋翼产生的力和力矩,且该软件的旋翼建模已经由实际飞行验证了其软件建模的高置信度。机体气动模型采用课题组成熟的增量法进行建模,根据基态的气动数据与气动舵面舵偏产生的气动数据增量来计算出气动力和力矩,通过接口函数加入到Rotorlib的6自由度刚体模型中,该倾转旋翼无人机的主要建模参数如表1所示。
构建完倾转旋翼无人机的6自由度刚体模型之后通过时域和频域对其特性进行分析。通过在配平状态下的线性模型中注入单个操纵舵面扰动从而展开时域下的操纵响应分析。各舵面的扰动信号为持续0.5s的脉冲信号。通过观察纵向状态量的时域响应曲线,分析不同短舱倾角下的各纵向操纵舵面操纵效率的变化规律,总距输入1°脉冲,升降舵和纵向周期变距的输入保持为0不变(图3)。
由图3可见,随着短舱倾角的减小,旋翼拉力在纵向的分量逐渐增大。虽然垂向分力对总距的偏导随着短舱倾角的减小而减小,但由图3可见飞行模式下总距仍然对垂向速度有剧烈的影响。
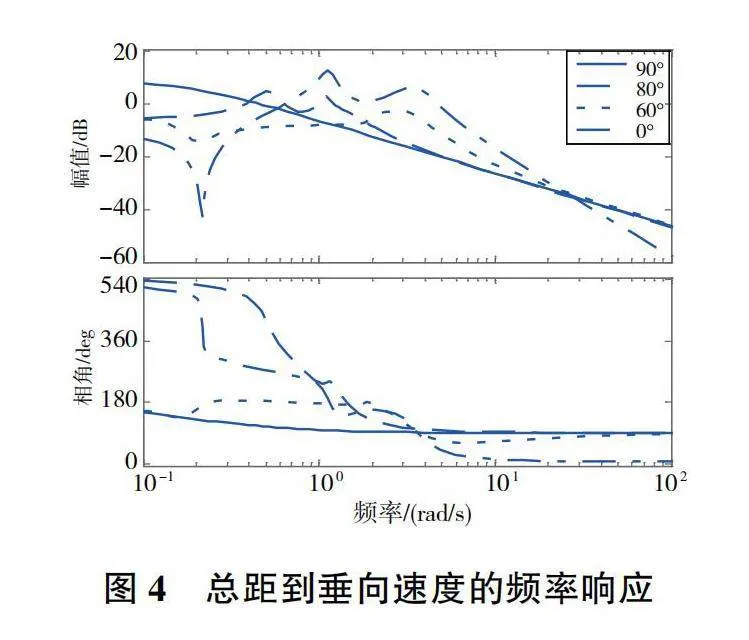
通过从不同短舱倾角下的线性化模型中提取总距操纵舵面到纵向状态量的传递函数,从而对各纵向操纵舵面操纵效率的变化规律展开频域分析,如图4和图5所示。
频域响应曲线中低频段的增益和截止频率的大小可以表征该通道的快速性,即舵面输入对状态量的操纵效率。可以结合低频段增益和截止频率由上述频域曲线中得到与时域分析中一样的结论:随着旋翼短舱的前倾,总距对垂向速度的操纵效率逐渐减弱,对前向速度的操纵效率逐渐增强,纵向周期变距的操纵效率逐渐减弱的同时升降舵操纵效率逐渐增强。
2 总距控制通道控制律设计
2.1 垂向控制结构设计
对象倾转旋翼无人机总距控制通道采用阻尼内回路对高度进行控制,基于阻尼内回路的高度控制律主控量为高度信号,为提高系统阻尼引入升降速率。为了提高控制的环境适应性,采用了两个手段,首先是总距的配平值作为前馈部分,其值与机体质量、转速、海拔高度等有关,从此方面可提高环境适应性。其次是为了提高在扰动情况下高度控制的适应能力而引入积分环节,单纯的高度PD控制结构仅能在配平量完全准确的情况下才能实现高度的零偏差控制。
基于阻尼内回路的高度控制律为
控制结构如图6所示。
1)升降速度阻尼回路设计
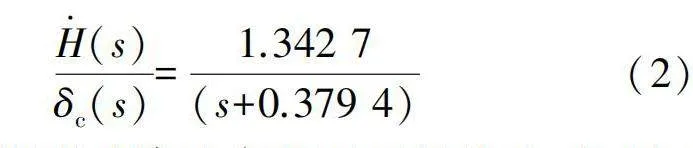
参数设计由内而外,首先设计升降速率的反馈系数。根据模型求出总距到升降速度响应的传递函数为
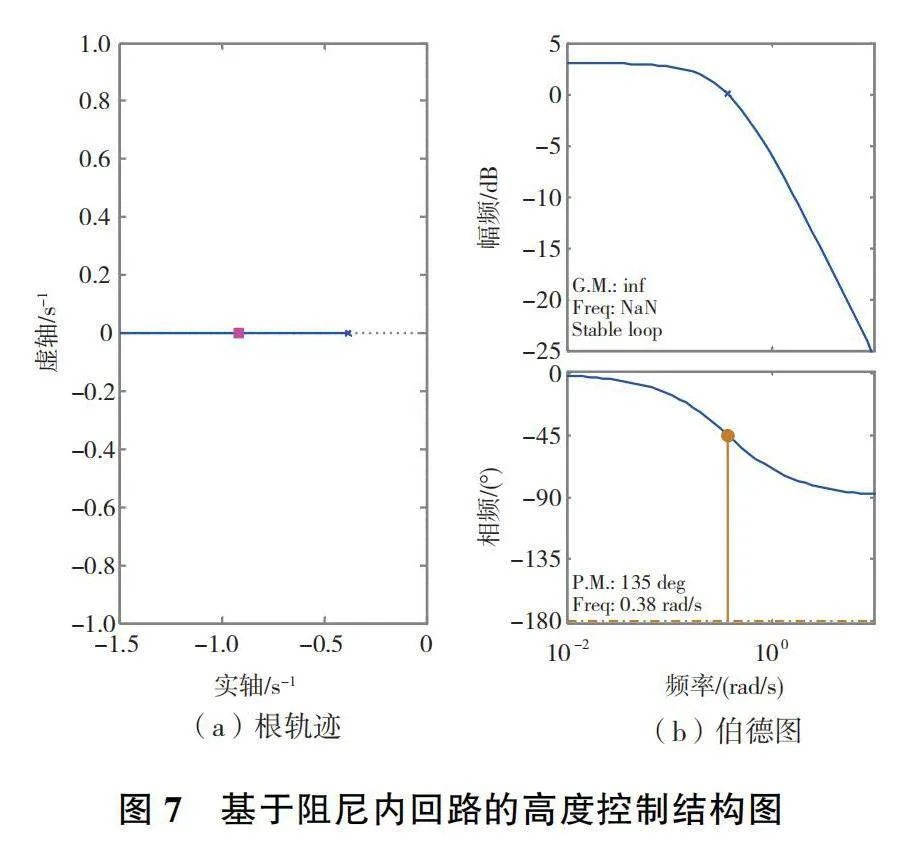
绘制总距到升降速率的开环根轨迹,如图7所示。
由开环传递函数结合图7所示根轨迹可以看出,总距到升降速率响应速度缓慢,需加快系统响应速度。再结合一组不同升降速率反馈增益下如图8所示的总距到高度开环根轨迹图,可以看出升降速率的系数变化不改变高度开环根轨迹形状,仅改变了响应速度的大小。同时考虑工程使用,系数选取KH·=0.4。此时垂向的时间常数减小为1.1s,响应速度得到明显的改善。
2)高度控制回路设计
高度通道是随遇平衡的,即本身出现一个干扰项,如突然有阵向上垂向风,高度会随之爬高固定到新位置而不会归置原位置。此特性下可以仅使用PD控制结构便可以使之达到阻尼控制,满足控制的平稳性,但是为了使高度通道在不同环境下有消除控制误差的能力,积分环节必不可少。同时考虑在自主起降阶段,高度控制的控制精度要求较高,所以最终采取PID结构。
接入升降速率后提取出总距到高度通道的开环传递函数:
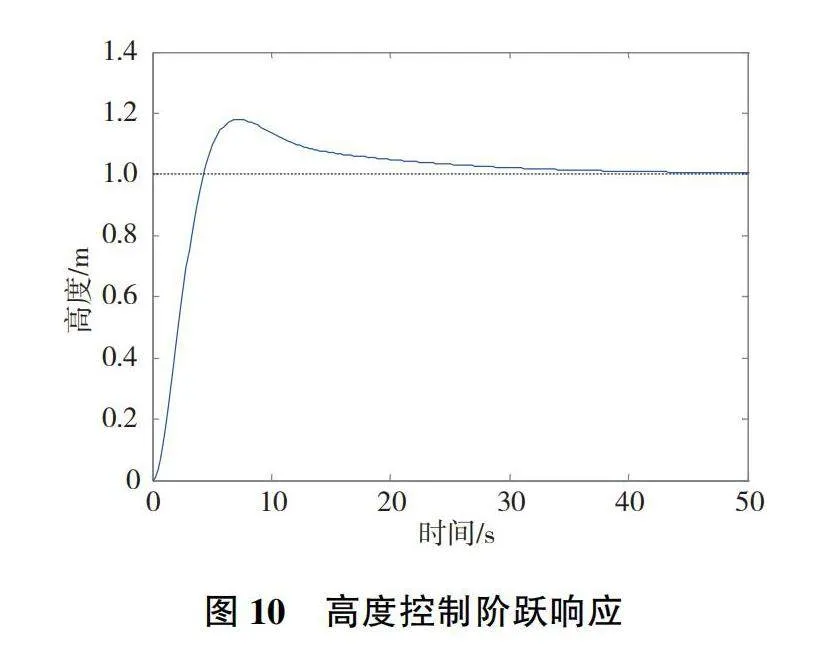
利用MATLAB的sisotool设计高度通道的比例积分环节,如图9所示。
观察图9,阻尼比为0.737,幅值裕度为稳定,相角裕度Pmgt;56°,同时观察高度控制阶跃响应曲线图(图10),上升时间为7s,调节时间在31s,超调量δ<20%。此结果可以满足设计要求。最终设计参数为KH=0.45,IH=0.03。
2.2 纵向控制结构设计
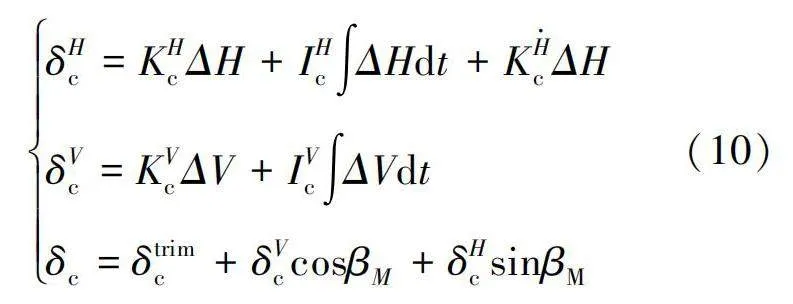
通过1.2节的分析,可以发现在过渡过程中,随着旋翼的前倾,总距的改变会导致纵向和垂向上的力同时发生改变。所以过渡过程中总距也可以对纵向的速度进行控制。这里对速度的控制采用简单的比例积分控制,具体控制表达式如下:
参数设置通过非线性仿真选取设计的最终参数为KVc=0.3,IVc=0.03。
3 总距控制通道改进
3.1 改进策略控制结构
针对过渡过程总距控制通道高度和速度耦合的问题,其本质在于纵向周期变距在大干扰下试图调节飞行器的前飞速度时,改变了旋翼升力的方向,从而影响其垂向分力并最终影响到高度控制效果。本节提出余弦分配的改进设计方法。
改进控制策略的设计思路是对总距控制通道的速度控制分量与高度控制分量按照一定权重系数进行分配,权重系数随短舱角的大小而变化,如图11所示。
过渡过程运动分析可得平飞过渡过程某一短舱角β下的纵向运动方程如式(5)所示。
无人机在平飞过程中轨迹为0°,因此无人机的俯仰角等于机身迎角,可进一步化简得式(6)。
式中:T和Hs分别表示左右双旋翼产生的拉力和后向力;L和D分别表示无人机产生的气动升力和阻力;V·表示无人机合力产生的加速度。
忽略旋翼后向力中的翼型阻力及其他小项,可以得到式(7)。
Hs=Ta1s(7)
式中a1s表示旋翼挥舞引起的后倒角。由于过渡飞行过程中飞行迎角相对较小,为凸显主要矛盾,忽略动力学方程中的ϑ,将式(7)代入式(6)可得:
忽略旋翼挥舞的影响,可以得到下式:
可以看出旋翼拉力在纵、垂向的分量与短舱角有着天然的三角函数关系,而飞机模式操纵段的纵、垂向耦合程度也是与旋翼轴的倾转有关。故可以采用余弦分配即三角函数来对速度控制分量和高度控制分量进行分配,所以改进控制结构如下所示。
3.2 改进策略性能对比
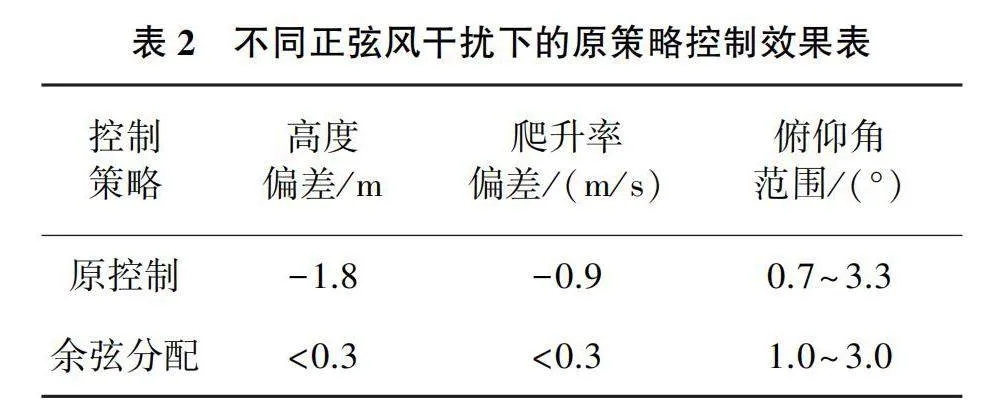
为了验证余弦分配改进策略的控制效果,本小节选取最恶劣的5m/s的顺风环境和5m/s的正弦风环境进行非线性仿真和理论分析,仿真数据如表2所示,仿真曲线如图12所示。
根据正弦风控制效果表和动态响应曲线可知,在余弦分配改进策略的作用下,相比较原始策略控制性能有着显著的提升,这也表明了余弦分配策略的合理性和可行性。
4 结语
本文聚焦于倾转旋翼无人机过渡段的操纵分配以及纵向控制问题,具体研究成果包括:
1)建立了倾转旋翼无人机的6自由度刚体模型,通过频域和时域对其过渡特性进行了分析,设计了过渡段的舵面分配操纵策略;
2)设计了总距控制通道的控制结构,并且提出了余弦分配的改进控制策略,提升了倾转旋翼无人机的飞行品质。
参考文献:
[1] STACKLEY S J. Unmanned systems integrated roadmap FY2011-2036 [Z]. Washington DC:Officer Of the Secretary Of Defense, 2011.
[2] PAW Y C. Synthesis and validation of flight control for UAV [D]. Minneapolis :The University of Minnesota, 2009.
[3] BOLKCOM C. V-22 osprey tilt-rotor aircraft [R]. [S.I.:s.n.],2004.
[4] AMARILLO T.V-22 osprey pocket guide[R]. [S.I.]:Bell Boeing V-22 Program Office, 2007.
[5] 郭剑东. 无人倾转旋翼机飞行控制研究[D]. 南京:南京航空航天大学,2013.
[6] 韩丽敏. 倾转旋翼机过渡段纵向控制技术研究[D]. 南京:南京航空航天大学,2011.
[7] 曹芸芸. 倾转旋翼飞行器飞行动力学数学建模方法研究[D]. 南京:南京航空航天大学,2012.
[8] 赖水清,严峰,徐珂. 倾转旋翼机过渡飞行阶段控制律设计研究[J]. 直升机技术,2009(3):52-55.
[9] 肖斯奇. 倾转旋翼无人机过渡段纵向控制策略研究[D]. 南京:南京航空航天大学,2021.
收稿日期:2022-11-23
猜你喜欢
西安航空学院学报(2024年1期)2024-02-21 09:20:38
航空学报(2022年11期)2022-12-06 09:36:22
北京航空航天大学学报(2021年6期)2021-07-20 07:23:56
北京航空航天大学学报(2021年6期)2021-07-20 07:23:50
航空发动机(2021年1期)2021-05-22 01:20:30
航天控制(2020年4期)2020-09-03 10:46:16
装备环境工程(2020年2期)2020-03-23 06:44:06
铁道通信信号(2019年1期)2019-03-21 07:37:46
百科探秘·航空航天(2016年11期)2016-02-26 12:00:25
石油化工自动化(2014年6期)2014-09-10 05:53:32
