
多功能智能联合式大葱收获机设计
2024-08-23 00:00:00何晨旭苏光富张文杰沈悦陈佳春林志伟林权
河南科技 2024年14期











摘 要:【目的】传统大葱收获方式是人工挖掘,劳动量大且效率低,收获质量不能保证,难以满足大葱收获需求,市场迫切需要可代替人力劳动、适合大规模自动化收获的大葱收获机。结合国内大葱种植的农艺要求和种植模式,本研究提出研发设计了一款多功能智能化联合式大葱收获机。【方法】该收获机主要由拨土松土机构、导向结构、合页单向防倒结构、切平捋顺机构、柔性夹持机构、定量翻转机构、滚土机构、抖土收集装置等组成,并通过遥控器控制机器运行,实现收获智能化一体化。【结果】通过实践检验证明,该收获机具有结构紧凑,稳定性强,大葱损伤率低,收集效率高等优点。【结论】该收获机可以提高大葱的收获质量和收获效率,显著降低大葱收获人工成本,促进大葱收获机械化发展,具有重要的现实意义和广阔的推广前景。
关键词:大葱;收获;自动化;智能化;一体式;多功能
中图分类号:S233.74" " "文献标志码:A" " "文章编号:1003-5168(2024)14-0052-06
DOI:10.19968/j.cnki.hnkj.1003-5168.2024.14.010
Design of Multi-Functional Intelligent Combined Scallion Harvester
Abstract: [Purposes] The traditional scallion harvesting method is manual mining, which costs a large amount of labor and has low efficiency. Therefore, the quality of harvesting can not be guaranteed, and it is difficult to meet the demand of scallion harvesting. The market urgently needs a scallion harvester that can replace human labor and is suitable for large-scale automatic harvesting. Combined with the agronomic requirements and planting mode of scallion planting, this study proposed to develop and design a multi-functional intelligent combined scallion harvester. [Methods] The harvester is mainly composed of soil shifting mechanism, guiding structure, hinge one-way anti-toppling structure, cutting and smoothing mechanism, flexible clamping mechanism, quantitative turning mechanism, rolling mechanism, shaking soil collection device, etc., and the machine is controlled by remote control to realize intelligent harvest integration. [Findings]" The harvester is proved to have the advantages of compact structure, strong institutional stability, low scallion damage rate and high collection efficiency through practical test.[Conclusions] The harvesting can improve the harvesting quality and harvesting efficiency of scallion, significantly reduce the labour cost of scallion harvesting, and promote the development of scallion harvesting mechanization, which has important practical significance and broad promotion prospects.
Keywords: scallion; harvesting; automated; intelligent; integration; multifunctional
0 引言
大葱是我国主要特色经济作物之一,大葱生产主要过程包括耕整葱地、育苗、开沟、移栽、培土和收获等,其中收获是至关重要的一环[1-3]。传统大葱收获方式是人工挖掘,不仅劳动量大且效率低,收获质量不能保证。近几年随着国外先进技术的引进和我国科技的进步,目前我国主要大葱收获机主要有两种,分别为分段收获机械和联合收获机械[4-5],其中分段收获机械结构简易、成本较低、容易操作,虽然在部分地区得到了推广应用,但分段收获机械仅对大葱进行松土提升,仍需要人工进行拔取、清杂、装框等作业,工作效率较低、人工成本较高[6-8];对于大葱联合收获机,大部分产品都存在技术瓶颈,不仅作业效率低,而且伤葱率高、清杂率低,难以满足国内大葱的收获需求[9-10]。本研究基于国内大葱种植农艺,研发设计了一种多功能智能联合式大葱收获机,该收获机可实现一次作业,完成大葱的旋耕松土、挖掘、多级清土清杂、切平、柔性夹持输送、收集装筐等,可显著提高大葱的收获质量和收获效率,降低大葱收获的人工成本,从而促进大葱收获向机械化、自动化发展,具有重要的社会现实意义和广阔的推广前景。
1 收获机整体结构及工作原理
1.1 整体结构
多功能智能联合式大葱收获机主要由机架、拨土松土机构、导向结构、合页单向防倒结构、切平捋顺机构、柔性夹持机构、定量翻转机构、滚土机构和抖土收集装置组成,其按照不同的使用功能与工作顺序,进行合理组装搭配,形成一个完整的收获机,收获机如图1所示。
1.2 工作原理
多功能智能联合式大葱收获机在一个工作周期内,主要完成行驶、松土、切平捋顺、导向、夹持、第一次清土、翻转、第二次清土、收集等动作,工作流程如图2所示。
大葱收获机在工作时根据指定工作路线,沿着大葱种植方向匀速前进。首先,前端电机通过同步带,带动松土盘沿着刀刃方向旋转,对大葱根部周围的泥土进行松土作业,保护了大葱根部的完整性。
然后,收获机继续前进,大葱进入导向装置。喇叭开口式的导向结构,将一定范围内的大葱包络到指定输送通道上。为了防止大葱由于根部泥土松动以及后续受切割时造成的不稳定,出现乱倾倒的现象,在导向装置后端,设置了合页单向防倒装置,继而保证了大葱顺利进入切平捋顺机构,刀片将大葱叶绿部分切平,两个滚筒毛刷反向旋转并夹持着大葱,保持竖直状态,进入柔性夹持传送机构,大葱通过一对交错皮带紧密夹持作用下,彻底从泥土中拔出,离开土壤沿着皮带传送方向,由竖直状态变为水平状态,进入定量翻转机构。最后,翻转机构尾端设计有滚土毛刷,对大葱根部进行第一次清土,当定量翻转机构上的大葱达到一定数量后,单片机收到时间信号,定量翻转机构进行向前翻转90°,一定数量的大葱掉落到抖土收集装置中,此时电机驱动曲柄摇杆机构抖动收集板,从而抖落收集板上的大葱根部剩余的泥土,完成收集。整个收集过程,均由自制遥控器控制完成,降低了人工成本。由于大葱的种植模式为单垄作业,所以大葱收获机可以在指定工作路线完成自主收获。
2 主要机构设计
2.1 拨土松土机构
拨土松土机构由两个松土盘、两对同步带轮和两对同步带组成,其结构如图3所示。通过两个直流减速电机6控制同步带轮旋转,同步带5传递扭矩,使松土盘1沿着刀刃方向进行旋转,从而对大葱根部进行松土作业,有效保证了大葱根部的完整性。
2.2 导向结构
导向结构由左导向板和右导向板组成,其结构如图4所示。喇叭开口式的导向结构可以将一定范围内的大葱包络到指定运行轨迹内,即左右导向板之间的通道内,有效提高了大葱收获机收获大葱的效率和成功率。
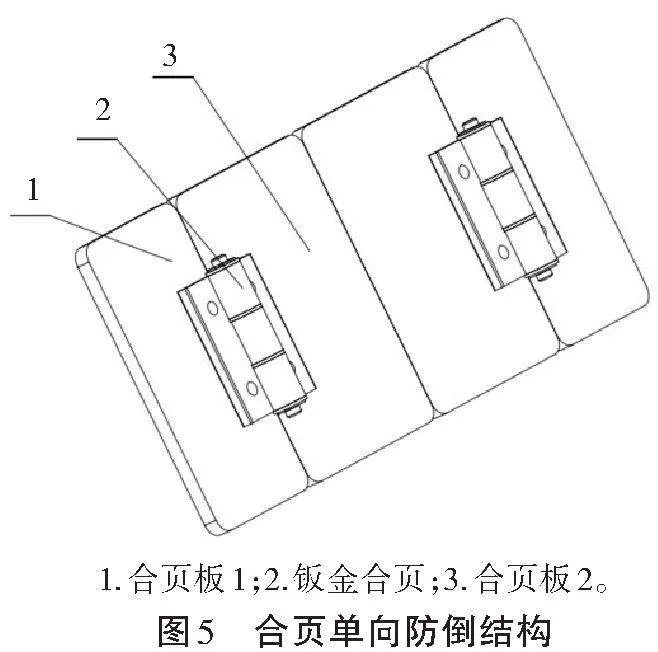
2.3 合页单向防倒结构
合页单向防倒结构由两个合页板和一个钣金合页组成,其结构如图5所示。大葱离开导向结构进入切平捋顺机构时,为了避免大葱由于根部泥土松动以及顶部绿叶部分受到切割力作用造成不稳定,出现乱倾倒的现象,所以在导向装置后端设置合页单向防倒结构。
2.4 切平捋顺机构
切平捋顺机构由滚筒毛刷固定板、滚筒毛刷、齿轮和联轴器等组成,其结构如图6所示。该机构由直流减速电机6驱动刀片3将大葱绿叶部分切平,通过中间小齿轮7啮合带动两个大齿轮8,实现两个滚筒毛刷2反向旋转,夹持大葱保持竖直状态,并推送进入柔性夹持传送机构。
2.5 柔性夹持机构
柔性夹持机构由滚筒、张紧座、皮带、轴、联轴器、齿轮、同步带轮和同步带等组成,如图7所示。柔性夹持机构的动力源直流电机11通过同步带12和带轮13及齿轮传动,带动一对交错皮带3转动,大葱在皮带3夹持作用下,彻底从泥土中拔出,沿着皮带传送方向,大葱由竖直状态变为水平状态。柔性夹持机构能够轻柔地夹持大葱,前张紧座2可以调整皮带松紧,从而避免对大葱造成损伤或压坏,保护了大葱的完整性和品质。柔性夹持机构可以调节夹持力度和夹持方式,能够根据大葱的不同大小和形状进行灵活调整,提高了适应性和操作的便利性。
2.6 滚土机构
滚土机构由单轴蜗杆式减速电机、联轴器、轴承座和滚筒毛刷等组成,其结构如图8所示。减速电机1通过蜗轮蜗杆减速带动滚筒毛刷4旋转,对大葱根部进行第一次清理。
2.7 定量翻转机构
定量翻转机构由翻转板、直流减速电机、PVC管、同步带轮等组成,其结构如图9所示。直流减速电机5驱动同步带6,带动PVC管3旋转,使传送到翻转板1上的大葱掉落到抖土收集装置中。该机构根据事先测试一定数量大葱掉落到翻转板上的时间,再写入单片机一个定时器程序,完成收集一定数量大葱后,电机带动滚筒翻转一定角度,完成定量翻转作业。
2.8 抖土收集装置
抖土收集装置由双轴蜗杆式电机、联轴器、加厚板、曲柄、抖土收集板等组成,其结构如图10所示。双轴蜗杆式电机11带动曲柄5旋转,带动摇杆板2左右摆动,从而使抖土收集板1振动,抖落大葱根部剩余的泥土,实现大葱根部的深度清洁,并完成收集。在此,抖土频率可以根据不同数量和种类的大葱进行调整,从而提高大葱收获机的适应性。
2.9 机架及行走机构
大葱收获机机架及行走机构如图11所示。机架主要采用标准件20 mm×20 mm规格的铝型材装配而成,通过角码及T型螺栓进行连接,由于所使用零配件均为标准件,从而大大降低了制作成本,且安装拆卸容易。大葱收获机的工作环境为田地,路面崎岖且泥泞,优选两驱动轮配合两从动轮方式,为收获机提供前进驱动力。
2.10 控制路线
多功能智能联合式大葱收获机通过stm32控制板连接电机驱动模块控制电机的启停、PWM调速、机构分级控制来进行工作。根据不同机构的运动形式可采用不同种类的电机驱动,控制路线如图12所示。
3 电路控制设计
根据大葱收获的工作环境以及设备使用条件,本研究自主设计以STM32F103C6T6芯片为核心的信号接收机和遥控器,遥控器完成对接收机的信号控制,操纵大葱收获机的收获动作。STM32F103C6T6芯片采用了基于ARM Cortex-M3内核的架构,具有高性能和较高的时钟频率,能够处理复杂的计算任务和完成多任务处理,并且集成了丰富的外设,包括多个通用定时器、串行通信接口(如USART、SPI、I2C)、模拟数字转换器(ADC)等,可以满足大葱收获机的控制需求。接收机搭载NRF24L01无线模块、双路电机驱动模块和MOSFET MOS管场效应管模块,12 V铅酸蓄电池通过DC-DC降压到5 V后通过LDO降压到3.3 V给芯片NRF24L01模块供电。该接收机有12个通道,拥有控制四路电机正反转、四路开关和四路PWM电机调速功能。板载3个LED指示灯,可以显示当前的工作状态。遥控器控制板搭载TP4056锂电池充电管理芯片,可以通过TYPE-C接口进行充电,采用锂电池供电。遥控器采用两个电阻式摇杆、两个拨盘齿轮电位器、两个三段开关和四个独立按键进行控制。同时板载一块0.96寸的OLED显示屏,可以显示12个通道及电池状态等信息。
4 结语
本研究研发设计了一种多功能联合式大葱收获机,其集大葱挖掘、刷土、柔性夹持、输送、二次清土、收集等作业于一体。通过理论分析和田间试验,确定了挖掘抖土装置、柔性夹持输送装置、收集装置等关键结构及参数,解决了大葱联合收获的难题。实践证明,该收获机结构合理、运行可靠,不仅提高了大葱生产收获自动化、智能化水平,也进一步助力大葱产业提质增效。
参考文献:
[1]赵帮宏,宗义湘,乔立娟,等.2019年我国辛辣类蔬菜产业发展趋势与政策建议[J].中国蔬菜,2019(6):1-5.
[2]彭帅,杨勇,陈龙,等.大葱种植与机械化收获分析[J].中国农机化学报,2017,38(9):30-35.
[3]丁为民.农业机械学[M].北京:中国农业出版社,2011.
[4]王方艳.大葱生产技术及收获装备[J].农业工程,2017,7(5):1-4.
[5]刘敬伟.双行大葱联合收获机的设计与研究[D].泰安:山东农业大学,2018.
[6]彭帅.双行自走式大葱联合收获机的设计及关键技术研究[D].青岛:青岛理工大学,2018.
[7]中国农业机械科学研究院.农业机械设计手册[M].北京:机械工业出版社,2007.
[8]王方艳,高洪伟.基于农机农艺融合的大葱机械化移栽关键技术研究[J].农机化研究,2018,40(9):257-263.
[9]山东省质量技术监督局. 农产品收获机械 通用技术要求第1 部分:大葱挖掘机:DB37/T 2878.1—2016[S]. 2016.
[10]刘敬伟,李玉华,吴彦强,等.双行自走式大葱收获机的设计研究[J].农机化研究,2019,41(3):130-134.
猜你喜欢
演艺科技(2016年4期)2016-11-16 08:16:21
农机使用与维修(2016年10期)2016-11-10 09:24:47
知音励志·社科版(2016年8期)2016-11-05 04:34:11
家庭科学·新健康(2016年9期)2016-10-25 16:41:38
中国科技博览(2016年18期)2016-10-19 07:01:13
中国市场(2016年36期)2016-10-19 03:40:15
科技视界(2016年20期)2016-09-29 14:13:02
科技视界(2016年20期)2016-09-29 13:45:10
企业导报(2016年13期)2016-07-19 17:24:34
新民周刊(2016年21期)2016-06-02 11:08:15
