基于改进sigmoid函数的PMSM无传感器控制
2024-07-31 00:00:00蔡烁卢军黄海波吕文举
湖北汽车工业学院学报 2024年2期

摘 "要:针对永磁同步电机传统滑模观测器在零点切换过程中由于使用符号函数引起高频震荡以及相位滞后现象,引入改进sigmoid函数替换符号函数以减小零点切换过程中的高频抖振,同时在使用锁相环的基础上加入角度补偿算法估计转子位置以减小高频抖振产生的角度估计误差,基于Simulink建立模型并进行仿真。仿真结果表明,与传统观测器相比,新的控制方法在抖振抑制和鲁棒性方面均有较大提升。
关键词:永磁同步电机;无传感器控制;滑模观测器;锁相环
中图分类号:TM341 " " " " " " " " " " " " " " 文献标识码:A 文章编号:1008-5483(2024)02-0042-05
Sensorless Control of PMSM Based on Enhanced Sigmoid Function
Cai Shuo, Lu Jun, Huang Haibo, Lü Wenju
(School of Electrical amp; Information Engineering, Hubei University of Automotive Technology, Shiyan 442002, China)
Abstract: In traditional sliding mode observers for permanent magnet synchronous motor (PMSM), high-frequency jitters and phase lags caused by using sign function during zero-point switching are observed. To address these issues, an enhanced sigmoid function was introduced to replace the sign function, so as to mitigate high-frequency jitters during zero-point switching. At the same time, an angle compensation algorithm was used in conjunction with a phase-locked loop (PLL) to estimate rotor position and reduce angle estimation errors caused by high-frequency jitters. A model was constructed in Simulink for simulation. The simulation outcomes indicate that the new control method greatly suppresses jitter and improves robustness compared to conventional observers.
Key words: PMSM; sensorless control; sliding mode observer; PLL
永磁同步电机(permanent magnet synchronous motor,PMSM)因其高效率、高功率密度、高精度控制以及低维护成本等优点,广泛应用在工业、交通、家电等领域[1]。传统电机控制方式分有传感器控制和无传感器控制,前者依靠传感器件检测电机参数,后者根据电机绕组中的电信号利用算法估算电机位置等信息。由于传感器控制方式的成本较高,同时传感器容易受到环境、振动等因素的影响从而降低系统的可靠性,因此为了解决上述问题,无传感器控制被广泛研究。在电机控制中常见的无传感器控制方法有反电动势估计[2]、高增益观测器[3]、滑模观测器(sliding mode observer, SMO)[4]、模型预测控制[5]、机器学习等,其中滑模观测器因具有抗干扰性强、高速响应、较少的参数依赖、可扩展性强的特点被各大研究人员研究。文献[6]用积分滑模面代替传统滑模面的方式提高了电流误差值收敛到零的速度,从而增强了系统抗干扰能力。文献[7]使用SMO与变趋近律相结合的方式缓解了传统SMO在估计转子位置和转速时存在的抖动问题,但是并没有改善传统SMO由于切换函数不连续带来的抖振现象。文献[8]使用具备连续性的双曲线函数作为PMSM无传感器控制系统中的控制函数,一定程度上抑制了抖振现象。文献[9]将传统滑模观测器中基于反正切函数的转子位置估计优化为基于锁相环的位置估计,在SMO系统中对高频抖振有一定的抑制效果,同时系统的动态性能和精度也有一定的提高。在上述研究的基础上,文中将传统滑模观测中的不连续的切换函数[sgn]替换为光滑连续的改进sigmoid函数,采用观测精确度和抗干扰能力更强的锁相环进行位置估计,并在此基础上加入角度补偿算法,从而提升控制系统的整体性能。
1 PMSM数学模型
在同步旋转坐标系[d-q]下PMSM的定子电压方程为
[ud=Rid+Lddid dt-ωeLqiquq=Riq+Lqdiq dt+ωe(Ldid+ψf)] (1)
式中:[ud]、[uq]分别是定子电压的[d-q]轴分量;[id]、[iq]分别是定子电流的[d-q]轴分量;[R]是定子的电阻;[ψd]、[ψq]是定子磁链的[d-q]轴分量;[ωe]是电角速度;[Ld]、[Lq]分别是[d-q]轴电感分量;[ψf]代表永磁体磁链。将式(1)中的[ωe(Ldid+ψf)]拆开,改写为[u]与[i]的矩阵形式:
[uduq=R+dLd dt-ωeLqωeLdR+dLq dtidiq+0ωeψf] (2)
由于在滑模观测器设计中会涉及计算扩展反电动势,需要将静止坐标系[α-β]下的电机模型中与电感有关的量都打包到一起,为此需要在[d-q]轴旋转坐标系下将电感矩阵调整为“对称”的形式,式(2)可转换为
[uduq=R+dLd dt-ωeLqωeLqR+dLq dtidiq+0u0u0=ωeψf+(Ld-Lq)(ωeid-dLq dt)] (3)
目前,大多数SMO算法设计都是基于静止坐标系下的数学模型,所以要想得到静止坐标系下的数学模型只需对式(3)定子电压方程通过反Park变换即可变换到静止坐标系下
[uαuβ=R+dLd dtωe(Ld-Lq)-ωe(Ld-Lq)R+dLd dt× " " " " " " "iαiβ+0u0-sinθecosθe] (4)
式中:[μα]、 [μβ]、[iα]、[iβ]分别为静止坐标系[α]-[β]下的定子电压和定子电流;[θe]为电角度。
2 滑模观测器设计
2.1 传统滑模观测器设计
文中以表贴式PMSM作为研究目标,根据表贴式PMSM的特性,式(4)可以建立数学模型如下:
[uαuβ=R+dLd dt00R+dLd dtiaiβ+EαEβ] (5)
[EαEβT=ωeψf -sinθecosθeT] (6)
式中:[EαEβT]为扩展反电动势。为了便于应用SMO来观测扩展反电动势,将式(5)的定子电压方程改写为电流的状态方程形式:
[ddtiαiβ=Aiαiβ+1LSuαuβ-1LSEαEβA=1LS-R00-R] (7)
由式(9)可设计观测器如下:
[ddtiαiβ=Aiαiβ+1LSuαuβ-1LSvαvβ] (8)
式中:[iα]、[iβ]为观测器估计的电流值;[uα]、[uβ]为设计的SMO的控制输入信号端口。结合式(7)~(8)可以得到传统SMO定子电流的误差方程:
[ddtiαiβ=ddtiα-iαiβ-iβ=Aiαiβ+1LSEα-vαEβ-vβ] (9)
式中:[iα]、[iβ]为观测器的电流观测误差。传统滑模控制律为
[vαvβT=ksgniαsgniβT, " kgt;0] (10)
式中:[sgn]为符号函数,正数取1,负数取-1;[k]为滑模增益,决定了[iα]、[iβ]的收敛速度以及是否收敛于[iα]、[iβ]。定义滑模面函数:
[s=s1s2=iαiβ=iα-iαiβ-iβ] (11)
根据李雅普诺夫定理选择滑模面函数的李雅普诺夫候选函数:
[V=V1V2T=sTs2=12s21s22T] (12)
对式(12)求导可得:
[V=V1V2T=sTdsdt] (13)
根据李雅普诺夫定理的定义可知,系统稳定时需要满足条件:
[V(x)gt;0, " x≠0] (14)
[Vlt;0] (15)
由式(12)知,式(14)成立。根据式(9)和式(15)可得
[V1=iαddtiα=iα-RLSiα+EαLS-kLSsgniαlt;0] (16)
对式(16)整理得:
[kgt;-Ria+Eα, " iagt;0kgt;-Ria+Eα, " ialt;0] (17)
引入符号函数sgn,式(17)可整理为
[kgt;-Riα+Eα sgniα] (18)
同理,对[V2]进行求解分析可得:
[kgt;-Riβ+Eβ sgniβ] (19)
结合式(18)~(19)可知,k的取值:
[kgt; max-Riα+Eα sgniα,-Riβ+Eβ sgn iβ] (20)
当[k]满足式(20)时,式(15)成立,系统收敛。函数[V]将收敛到0,且保持在该状态,此时[iα]为0,结合式(9)~(10)及滑模控制的等效控制原理,可以得到:
[EαEβT=vαvβT=ksgn iαsgn iβT] (21)
可以看出实际的控制量是不连续的高频切换信号,会产生较大的纹波,因此需要加入低通滤波器,滤波器表达式:
[EαEβT=wc wc+s-1EαEβT] (22)
式中:[ωc]为滤波器的截止频率。
2.2 改进滑模观测器设计
在传统滑模观测器中,符号函数[sgn]作为系统控制函数常用于滑模控制和状态估计。但这种方法会在控制过程中引起高频的切换,在某些情况下会导致控制器的输出出现“抖动”现象,引起系统震荡,影响控制系统的性能。除外,符号函数的输出变化非常陡峭,这会导致控制器的输入含有高频分量,增加电机的磨损,降低系统的可靠性和寿命。为了解决上述问题,文中提出了基于改进sigmoid的连续函数逼近方法,它可以在某个范围内具有符号函数的特性,使系统具有较强的鲁棒性,同时该函数的连续光滑特性可以减少系统抖动和高频分量。改进后的sigmoid函数表达式为
[sigm(s)=21+e-αs-1] (23)
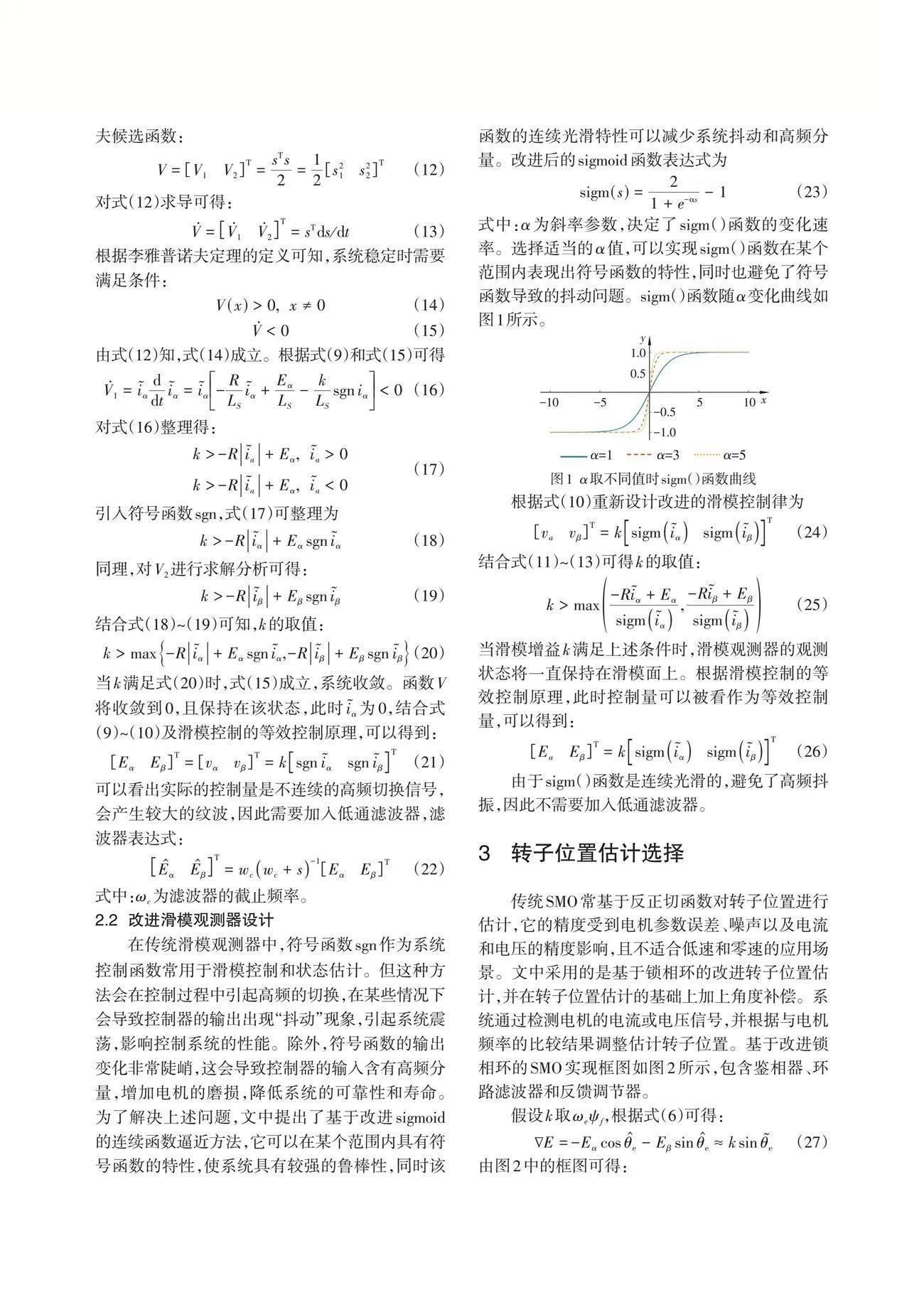
式中:[α]为斜率参数,决定了sigm()函数的变化速率。选择适当的[α]值,可以实现sigm()函数在某个范围内表现出符号函数的特性,同时也避免了符号函数导致的抖动问题。sigm()函数随[α]变化曲线如图1所示。
根据式(10)重新设计改进的滑模控制律为
[vavβT=ksigmiαsigmiβT] (24)
结合式(11)~(13)可得k的取值:
[kgt;max-Riα+Eαsigmiα,-Riβ+Eβsigmiβ] (25)
当滑模增益[k]满足上述条件时,滑模观测器的观测状态将一直保持在滑模面上。根据滑模控制的等效控制原理,此时控制量可以被看作为等效控制量,可以得到:
[EaEβT=ksigmiαsigmiβT] (26)
由于sigm()函数是连续光滑的,避免了高频抖振,因此不需要加入低通滤波器。
3 转子位置估计选择
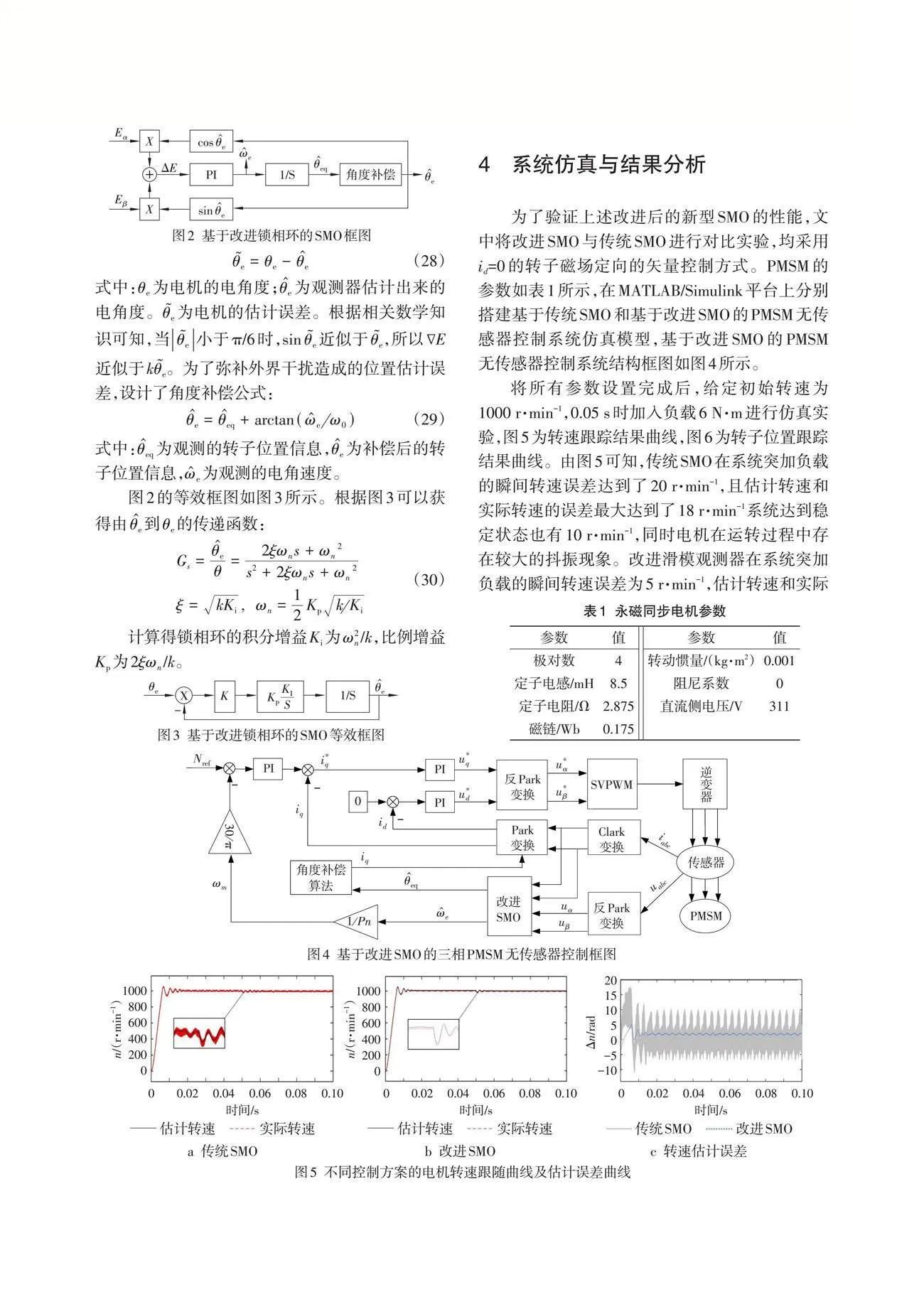
传统SMO常基于反正切函数对转子位置进行估计,它的精度受到电机参数误差、噪声以及电流和电压的精度影响,且不适合低速和零速的应用场景。文中采用的是基于锁相环的改进转子位置估计,并在转子位置估计的基础上加上角度补偿。系统通过检测电机的电流或电压信号,并根据与电机频率的比较结果调整估计转子位置。基于改进锁相环的SMO实现框图如图2所示,包含鉴相器、环路滤波器和反馈调节器。
假设k取[ωeψf],根据式(6)可得:
[∇E=-Eαcosθe-Eβsinθe≈ksinθe] (27)
由图2中的框图可得:
[θe=θe-θe] (28)
式中:[θe]为电机的电角度;[θe]为观测器估计出来的电角度。[θe]为电机的估计误差。根据相关数学知识可知,当[θe]小于[π/6]时,[sinθe]近似于[θe],所以[∇E]近似于[kθe]。为了弥补外界干扰造成的位置估计误差,设计了角度补偿公式:
[θe=θeq+arctan(ωe ω0)] (29)
式中:[θeq]为观测的转子位置信息,[θe]为补偿后的转子位置信息,[ωe]为观测的电角速度。
图2的等效框图如图3所示。根据图3可以获得由[θe]到[θe]的传递函数:
[Gs=θeθ=2ξωns+ωn2s2+2ξωns+ωn2ξ=kKi, " ωn=12KpkKi] (30)
计算得锁相环的积分增益[Ki]为[ω2n/k],比例增益[Kp]为[2ξωn/k]。
4 系统仿真与结果分析
为了验证上述改进后的新型SMO的性能,文中将改进SMO与传统SMO进行对比实验,均采用[id]=0的转子磁场定向的矢量控制方式。PMSM的参数如表1所示,在MATLAB/Simulink平台上分别搭建基于传统SMO和基于改进SMO的PMSM无传感器控制系统仿真模型,基于改进SMO的PMSM无传感器控制系统结构框图如图4所示。
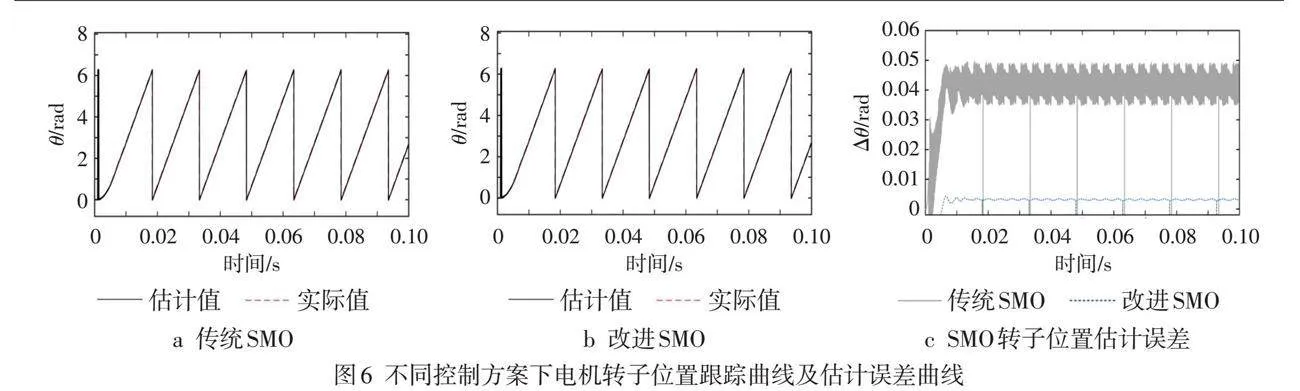
将所有参数设置完成后,给定初始转速为1000 r·min-1,0.05 s时加入负载6 N·m进行仿真实验,图5为转速跟踪结果曲线,图6为转子位置跟踪结果曲线。由图5可知,传统SMO在系统突加负载的瞬间转速误差达到了20 r·min-1,且估计转速和实际转速的误差最大达到了18 r·min-1系统达到稳定状态也有10 r·min-1,同时电机在运转过程中存在较大的抖振现象。改进滑模观测器在系统突加负载的瞬间转速误差为5 r·min-1,估计转速和实际转速的误差最大为5 r·min-1,系统稳定时的转速误差维持在2 r·min-1,与传统SMO相比,控制效果改善较大。同时改进SMO控制的电机在运转过程中非常平稳,抑制抖振现象效果明显,并且具有更好的动态响应能力和抗干扰能力。
通过图6可知,传统SMO的转子估计误差为0.04 rad,改进SMO的转子估计误差为0.0083 rad,改善了79%,具有更加好的转子位置估计能力,显著提高了对转子位置估计的精确度。
5 结论
文中提出了新型的滑模观测器策略。采用在零点连续的改进sigmoid函数代替传统的符号函数,采用锁相环对转子位置进行估计,并在此基础上加入角度补偿算法。仿真分析表明,改进的控制策略抖振较弱,响应速度、转子位置的观测精确和系统鲁棒性均有所提升。
参考文献:
[1] "谷善茂,何凤有,谭国俊,等. 永磁同步电动机无传感器控制技术现状与发展[J]. 电工技术学报,2009,24(11):14-20.
[2] "张瑞祥,包广清,汪波,等. 基于变趋近律滑模反电动势观测器的BLDCM无位置传感器控制[J]. 电机与控制应用,2022,49(8):1-6.
[3] "王杰,周立,苏美霞,等. 基于模糊控制的自适应超螺旋滑模观测器无传感器控制[J]. 电气工程学报,2023,18(1):32-42.
[4] "柯栋梁,汪凤翔,李家祥. 基于自适应高增益观测器的永磁同步电机预测电流控制方法[J]. 中国电机工程学报,2021,41(2):728-738.
[5] "李耀华,刘子焜,王孝宇,等. 永磁同步电机模型预测转矩控制简化控制策略[J]. 控制理论与应用,2023,40(10):1793-1805.
[6] "张祺琛,刘细平,王方凯文,等. 基于改进滑模观测器的永磁同步电机无传感器控制[J]. 组合机床与自动化加工技术,2022(1):85-88.
[7] "张强,赵显新,马强. 基于新型滑模观测器的永磁同步电机无传感器控制[J]. 组合机床与自动化加工技术,2020(7):98-101.
[8] "涂志文,蒋成明,涂群章,等. 基于改进型SMO的PMSM无传感器控制方法[J]. 装备制造技术,2020(11):12-17.
[9] "丰飞,邵瑛. 基于PLL系统的永磁同步电机滑模观测器控制系统研究[J]. 自动化技术与应用,2021(8):6-10.
[10] "郭军宏,曹太强,林轩,等. 一种改进滑模观测器的永磁同步电机无传感器控制[J/OL]. 控制工程,1-9[2024-04-01]. https://doi.org/10.14107/j.cnki.kzgc.20220185.
[11] "袁潇,杨泽斌,徐雷钧. 基于改进型滑模观测器的永磁同步电机无传感器控制策略[J]. 微特电机,2022,50(7):47-52.
[12] "Datta S,Chandra A,Chowdhuri S. High Performance Sensor-less V/f Control of Surface PMSM in Voltage Vector Plane with ZVV Injection and SMO-based Position Estimation Method[J]. Electrical Engineering,2022,104(2):657-666.
[13] "Ren N N,Fan L,Zhang Z. Sensorless PMSM Control with Sliding Mode Observer Based on Sigmoid Function[J]. Journal of Electrical Engineering amp; Technology,2021,16(2):933-939.
猜你喜欢
电子制作(2019年15期)2019-08-27 01:12:08
电子测试(2018年14期)2018-09-26 06:04:00
电测与仪表(2017年24期)2017-12-19 05:15:22
汽车工程学报(2016年5期)2017-01-16 02:42:50
计算技术与自动化(2016年4期)2017-01-11 14:06:23
电子技术与软件工程(2016年19期)2016-12-19 18:43:28
中国科技博览(2016年15期)2016-08-23 00:59:37
电脑知识与技术(2016年13期)2016-06-29 21:41:37
科技视界(2016年12期)2016-05-25 11:07:56
电测与仪表(2016年22期)2016-04-12 00:19:54