某七节折臂式起重机伸缩臂截面尺寸优化
2024-07-31 00:00:00陈勇刘吉陈君宝
湖北汽车工业学院学报 2024年2期


摘 "要:针对七节折臂式起重机伸缩臂截面进行了尺寸优化设计,旨在实现轻量化,提高机动性和承载能力。运用Solidworks进行伸缩臂的参数化建模,结合Ansys中间复合材料设计方法,生成了一系列样本数据并采用NSGA-II算法进行优化,最终确定最佳的截面尺寸。优化结果显示,在保持结构安全性和可靠性的前提下,改进后的伸缩臂减重率达到15.07%,验证了优化方法的有效性和可行性。
关键词:折臂式起重机;参数化建模;轻量化;NSGA-Ⅱ算法
中图分类号:TH12;TH213.1 " " " " " " " 文献标识码:A 文章编号:1008-5483(2024)02-0025-04
Optimization for Sectional Dimensions of Telescopic Arm of
Seven-section Articulated Boom Crane
Chen Yong, Liu Ji, Chen Junbao
(School of Mechanical Engineering, Hubei University of Automotive Technology, Shiyan 442002, China)
Abstract: The sectional dimension optimization design for the telescopic arm of a seven-section articulated boom crane was carried out, so as to achieve light weight, thereby enhancing its mobility and load-bearing capacity. Solidworks software was used for parametric modeling of the telescopic arm, and an intermediate composite material design approach by Ansys software was utilized to generate a series of sample data. The NSGA-II algorithm was employed for optimization, identifying the best sectional dimension. The optimization results show that the improved telescopic arm significantly reduces the weight by 15.07% while maintaining structural safety and reliability. This confirms the efficacy and feasibility of the optimization method.
Key words: articulated boom crane; parametric modeling; light weight; NSGA-II algorithm
伸缩臂是折臂式起重机的重要负载部位[1],在选取同样截面形状的条件下,合理设计伸缩臂截面的尺寸参数能更好地提升折臂式起重机的安全性和起重性能,降低整体质量,节约成本,避免由于伸缩臂变形过大导致伸缩臂折断,从而引发安全事故[2]。目前许多企业仍依靠传统的经验设计,通过参考国外同类型的设备来类比设计,导致起重机各项参数相对保守,产品质量偏大,增加了能耗。为了克服设计上的限制并提升产品性能,有限元分析技术在起重机领域的应用显得尤为重要,主要包括2个方面:1)对伸缩臂、转台等部件在不同工况下进行仿真校核,以验证前期设计的合理性;2)通过有限元仿真软件对起重机结构进行优化设计,比较不同截面形状对伸缩臂的性能影响,从而实现轻量化设计。Wang等人[3]通过Ansys对300 T起重机伸缩臂的3种危险工况进行分析,对伸缩臂质量进行优化,达到轻量化的目的;Hui Wang等人[4]提出了基于一维高阶理论的U型薄壁梁模型;Junjie Lyv等人[5]通过Solidworks和Ansys联合仿真对单缸伸缩臂进行静力和模态分析,避免作业工程中产生共振;张磊等人[6]在QY25K5型起重机的基础参数上,设计U形截面,通过Inspire和ANSYS比对优化结果,为后续设计提供参考;朱节宏等人[7]对8 T起重机进行有限元分析,依据分析结果对伸缩臂进行局部强化、减材的操作,实现减重12%的预期目标;徐赛华等人[8]采用含有交叉项的响应面函数,以质量为优化目标进行尺寸优化。上述设计都是单一地将质量作为优化目标,忽略了实际情况中的风载等侧偏载,计算结果存在误差,因此文中考虑侧偏载荷情况,将质量、竖直方向和回转方向的挠度作为优化目标,通过NSGA-Ⅱ算法进行多目标优化,以获取最优的截面尺寸参数。
1 伸缩臂参数化建模
SQ580ZB7折臂式起重机主要由立柱、连杆、四连杆机构1、动臂、吊臂(伸缩臂)、四连杆机构2、动臂油缸及吊臂油缸等组成[9](图1)。折臂式起重机通过变幅油缸来实现重物的升降,通过立柱的旋转控制重物的左右旋转。伸缩臂作为主要承载部件,其结构决定了起重机的稳定性和安全性,文中对伸缩臂的截面尺寸进行优化,寻求最优的参数解。
依据设计图纸,在Solidworks中对起重机进行参数化建模,遵循模型简化原则,去掉倒角、圆孔等特征,忽略油缸等辅助结构[10],忽略摩擦力和温度等因素的影响,在保证伸缩臂力学性能的前提下得到简化模型(图2)。
1.1 优化参数选取
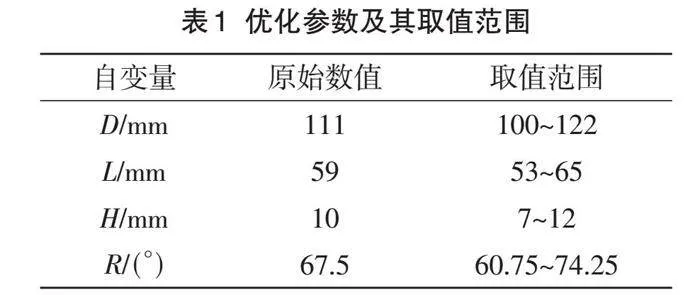
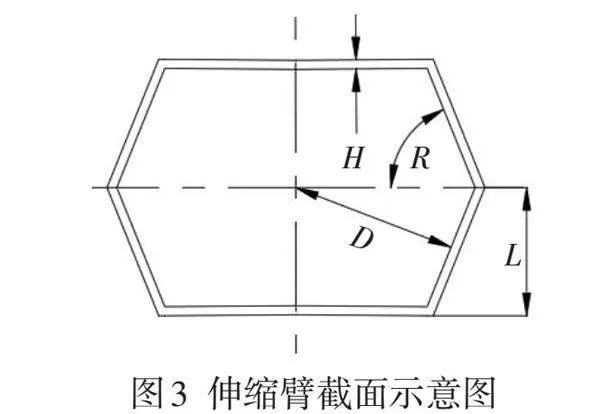
在Solidworks中建立不同节臂之间的尺寸关系,为缩短计算时间,对第七节伸缩臂进行单独分析,根据优化后的尺寸参数计算其他节臂尺寸,基于二维尺寸对模型重建。优化参数以原始模型作为参考,将伸缩臂的主要尺寸参数设置成自变量,如图3所示。综合考虑设计要求和约束条件,包括结构的强度、刚度、稳定性等,结合企业先验设计经验,在原始数据基础上上下浮动10%作为设计变量的取值范围,具体数值如表1所示。
1.2 典型工况和载荷选取
依据GB/T3811—2008[11],起重机作业的最危险工况为起重机伸缩臂全部伸展,呈水平姿态,按照设计的额定载荷施加力,额定载荷为1700 kg。在实际作业中,伸缩臂受环境风载荷影响,为了更真实地模拟实际作业环境,确保设计的可靠性和安全性,考虑对伸缩臂施加侧偏载荷,侧偏系数取5%。
2 伸缩臂有限元分析
2.1 材料属性
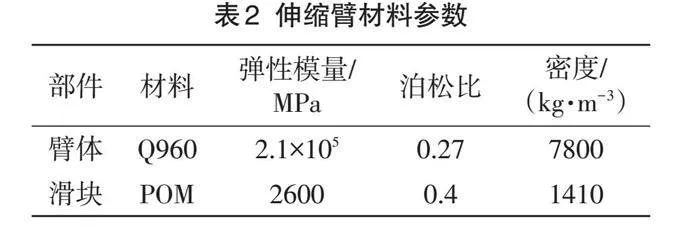
伸缩臂臂体材料采用的Q960是高强度低合金结构钢,具有良好的综合力学性能和焊接性能,屈服强度为960 MPa,抗拉强度为980 [MPa];滑块采用的POM塑料刚性高、摩擦低,具有良好的尺寸稳定性。材料属性在Engineering Date中添加,见表2。
2.2 安全系数
有风正常工作时,依据《起重机设计手册》,材料屈服强度和抗拉强度比值大于0.7时,许用应力的计算公式为
[σ=σb nb] (1)
式中:[[σ]]为许用应力;[σb]为抗拉强度;[nb]为材料的屈服强度及抗拉强度比值在对应载荷时选取的安全系数,取2.2。根据式(1)计算得[[σ]]为445 MPa。
根据GB/T3811—2008,起重机在变幅平面Y和回转平面[X]内的挠度计算公式为
[UY=L21000, " " "UX=0.7L21000] (2)
式中:[L]为伸缩臂总长;[UY]为变幅平面的许用挠度;[UX]为回转平面内的许用挠度。[L]取18.2 m,计算得到[UY]为331.24 mm,[UX]为231.87 mm。
2.3 边界条件和网格划分
起重机伸缩臂是薄壁结构,在划分网格时采用壳单元。为了提高计算精度,先对模型抽取中面[12],单元尺寸选择10 mm,通过ANSYS自动划分生成网格,第七节伸缩臂的网格单元数为18 628,节点数为18 669,网格划分情况如图4所示。伸缩臂间主要通过滑块和臂体的相互挤压来传递压力[13],文中选取某时刻作业姿态进行分析,各节臂之间没有相对位移,所以滑块和臂体之间的接触均采用刚性连接,载荷力分解为变幅平面内施加17 kN载荷分量,回转平面施加850 N侧偏载荷分量,具体边界条件和载荷施加如图5所示。
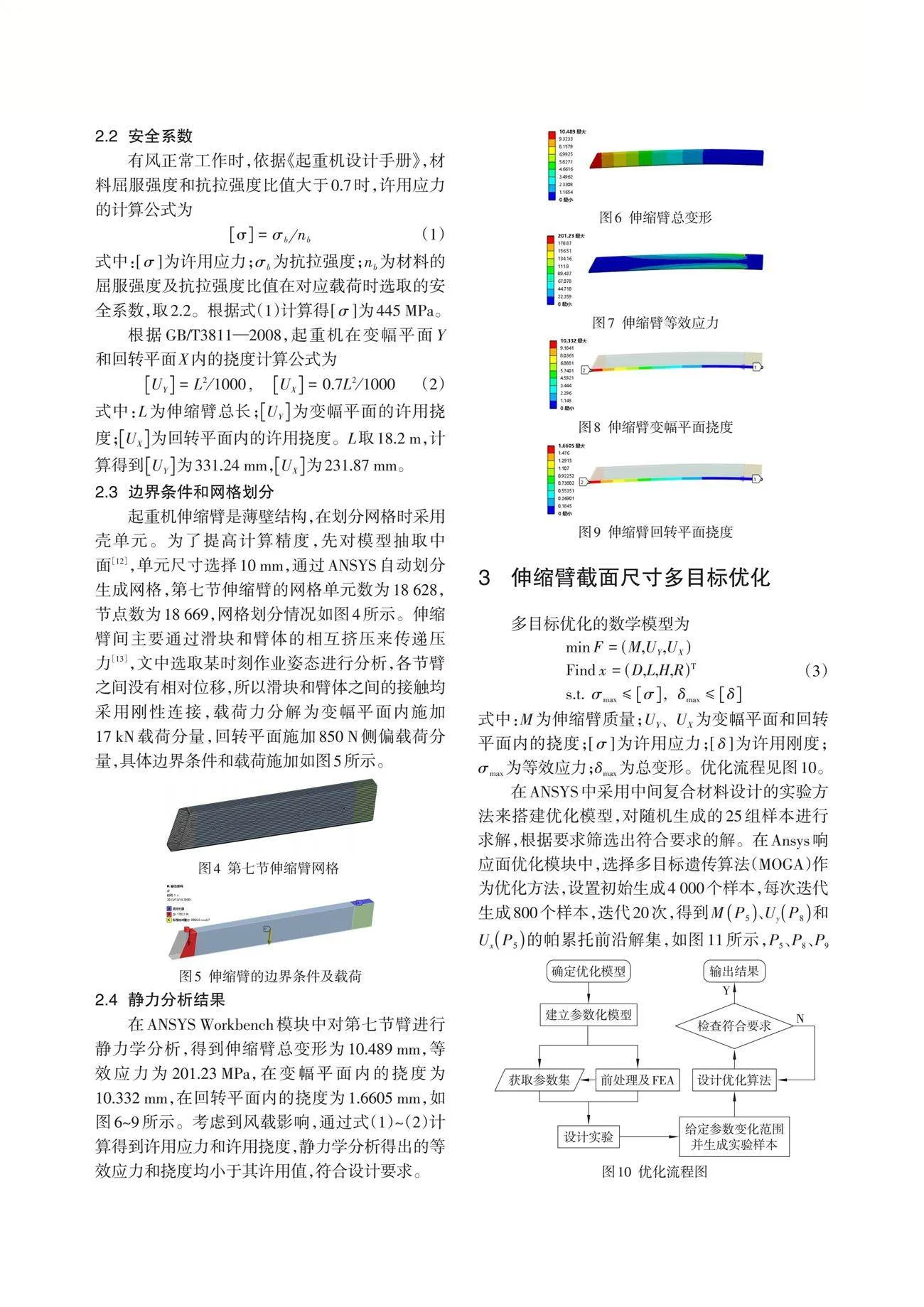
2.4 静力分析结果
在ANSYS Workbench模块中对第七节臂进行静力学分析,得到伸缩臂总变形为10.489 mm,等效应力为201.23 MPa,在变幅平面内的挠度为10.332 mm,在回转平面内的挠度为1.6605 mm,如图6~9所示。考虑到风载影响,通过式(1)~(2)计算得到许用应力和许用挠度,静力学分析得出的等效应力和挠度均小于其许用值,符合设计要求。
3 伸缩臂截面尺寸多目标优化
多目标优化的数学模型为
[minF=(M,UY,UX)Find x=(D,L,H,R)Ts.t. "σmax≤σ, " δmax≤δ] (3)
式中:[M]为伸缩臂质量;[UY、UX]为变幅平面和回转平面内的挠度;[[σ]]为许用应力;[[δ]]为许用刚度;[σmax]为等效应力;[δmax]为总变形。优化流程见图10。
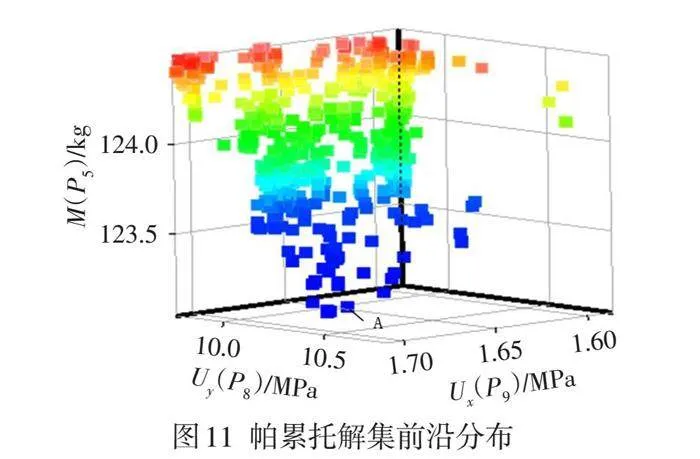
在ANSYS中采用中间复合材料设计的实验方法来搭建优化模型,对随机生成的25组样本进行求解,根据要求筛选出符合要求的解。在Ansys响应面优化模块中,选择多目标遗传算法(MOGA)作为优化方法,设置初始生成4 000个样本,每次迭代生成800个样本,迭代20次,得到[MP5]、[UyP8]和[UxP5]的帕累托前沿解集,如图11所示,P5、P8、P9为多目标优化中质量、变幅和回转平面挠度编号。从图11中可以看出,全局优化解集呈现扇形分布,随着伸缩臂总体质量的减小,挠度呈现不同趋势的减小。在这些解集中选取点A作为最终优化解。
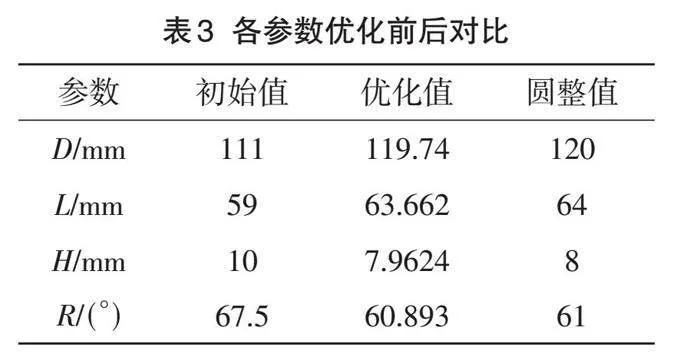
表3为点A各参数的优化值与圆整值,根据圆整值对伸缩臂重新建模,并进行有限元分析,得到优化后的质量、挠度等参数值(表4)。从表3~4可看出,优化后[MP5]减小了15.07%,同时变幅平面和回转平面的挠度分别减小了2.99%和0.99%,总变形减小了2.88%;虽然等效应力增大了4.25%,但仍在许用范围之内,满足材料的刚度、强度要求。
4 结论
针对某型号七节折臂式起重机,运用Solidworks对伸缩臂进行参数化建模,并与ANSYS进行联合仿真,对伸缩臂截面的尺寸进行优化。专注于起重机作业中的最危险工况,使用有限元分析方法研究伸缩臂的结构强度和稳定性。将变幅平面和回转平面内的挠度作为优化变量,在确定伸缩臂六边形截面和使用材料的情况下,通过NSGA-Ⅱ算法对样本点进行多目标优化,得到帕累托最优解集,在保证满足材料强度和刚度的条件下,起重机伸缩臂质量减小了15.07%,达到轻量化的效果,为后续同类型产品结构设计提供重要参考。
参考文献:
[1] "郭旭. 汽车起重机伸缩臂结构有限元分析及软件开发[D]. 秦皇岛:燕山大学,2020.
[2] "徐格宁. 机械装备金属结构设计[M]. 2版. 北京:机械工业出版社,2009.
[3] "Wang C S,Xing B S. Optimization of Crane Telescopic Boom Structure Based on Finite Element Software[J]. SAE International Journal of Materials and Manufacturing,2023,16(2):5-16-02-0015.
[4] Wang H,Zhang L,Liang S L,et al. One-dimensional High-order Dynamic Model of U-shaped Thin-wall Arm Segment of Telescopic Boom of Crane[M]//Advances in Transdisciplinary Engineering. IOS Press,2022. doi:10.3233/atde220473.
[5] "Lv J J,Fan R Q,Zheng X B,et al. Finite Element Analysis of the Telescopic Boom with Single Cylinder and Pinning System for Gantry Crane[C]//Third International Conference on Mechanical Design and Simulation (MDS 2023). SPIE,2023. doi:10.1117/12.2682005.
[6] "张磊,于世杰,徐进友,等. 面向轻量化目标的起重机伸臂结构设计及截面尺寸优化[J]. 机械设计,2023,40(6):124-133.
[7] "朱节宏,苏永志. 8t汽车起重机伸缩式主臂结构优化设计[J]. 装备制造技术,2023(8):182-186.
[8] "罗凯,滕儒民,樊传平,等. 全地面起重机起升变幅协调策略研究[J]. 中国工程机械学报,2021,19(4):313-317.
[9] "徐赛华,张高峰,杨秀萍,等. 基于响应面法的重载机械臂优化设计[J]. 制造业自动化,2022,44(4):70-72.
[10] "吴卫萍. 随车起重机吊臂结构分析与优化[D]. 广州:华南理工大学,2015.
[11] "国家质量监督检验检疫总局,中国国家标准化管理委员会. 起重机设计规范:GB/T 3811—2008[S]. 北京:中国标准出版社,2008.
[12] 徐成斌,路明村,张卫明. Solid Thinking Inspire优化设计基础与工程应用[M]. 北京:机械工业出版社,2016.
[13] "程远禄,王剑彬,张成亮. 基于ANSYS Workbench的QY80型汽车起重机吊臂有限元分析[J]. 机械研究与应用,2018,31(6):4-6.
[14] "杨慧杰,肖华,蔚旺,等. 中国汽车起重机的发展趋势探讨:BICES 2015北京展会上的汽车起重机[J]. 建设机械技术与管理,2015,28(10):48-49.
猜你喜欢
精密成形工程(2022年2期)2022-02-22 05:44:14
哈尔滨轴承(2020年4期)2020-03-17 08:13:52
成都信息工程大学学报(2019年4期)2019-11-04 00:56:02
阅读与作文(英语初中版)(2019年8期)2019-08-27 03:59:25
智富时代(2019年2期)2019-04-18 07:44:42
小学生学习指导(低年级)(2018年11期)2018-12-03 05:05:00
中学生数理化·高一版(2017年9期)2017-12-19 12:15:15
中国铸造装备与技术(2017年3期)2017-06-21 11:33:34
西安工程大学学报(2016年6期)2017-01-15 14:09:28
现代防御技术(2016年1期)2016-06-01 12:13:27