
鸽子养殖智能投料小车设计
2024-06-30 15:17黄千瑞张日红陈轩杰谢文迪肖鸿旭苏楚妍
自动化与信息工程 2024年3期
黄千瑞 张日红 陈轩杰 谢文迪 肖鸿旭 苏楚妍

摘要:随着现代畜禽业的快速发展,畜禽养殖场对养殖技术机械化、自动化的需求不断增加。鸽子精准投料技术不仅能够有效地提高饲料利用率、降低劳动力成本,还能提高生产效率和经济效益。该文以鸽子的智能精准投料为目标,设计鸽子养殖智能投料小车。首先,介绍鸽子养殖智能投料小车的硬件部分;然后,运用YOLOv7深度学习模型识别3层不同高度鸽笼内鸽子数量;接着,开发料仓内饲料剩余量超声波检测功能、路径跟踪与导航的红外循迹功能;最后,针对鸽子养殖智能投料小车的投料效率、运行精度和最佳投料距离进行实验分析。实验结果表明,在室内正常光照下,鸽子和喂料槽的识别准确率为93.36%,检测和投料的平均时间为2 s,饲料浪费率在1%以下,有效提高了鸽子养殖场的作业效率。
关键词:鸽子养殖;智能投料小车;视觉识别;深度学习;超声波检测;红外循迹
中图分类号:TP183; S817.3 文献标志码:A 文章编号:1674-2605(2024)03-0005-07
DOI:10.3969/j.issn.1674-2605.2024.03.005
Design of Intelligent Feeding Cart for Pigeon Breeding
Abstract: With the rapid development of modern livestock and poultry industry, the demand for mechanization and automation of breeding technology in livestock and poultry farms is constantly increasing. The precise feeding technology of pigeons can not only effectively improve feed utilization and reduce labor costs, but also improve production efficiency and economic benefits. This article aims to design an intelligent feeding cart for pigeon breeding with the goal of intelligent and precise feeding. Firstly, introduce the hardware of the intelligent feeding cart for pigeon breeding; Then, use the YOLOv7 deep learning model to identify the number of pigeons in three different height pigeon cages; Next, develop ultrasonic detection function for remaining feed in the silo, infrared tracking function for path tracking and navigation; Finally, experimental analysis was conducted on the feeding efficiency, operational accuracy, and optimal feeding distance of the intelligent feeding cart for pigeon breeding. The results showed that under normal indoor lighting, the accuracy of identifying pigeons and feeding troughs was 93.36%, the average time for detection and feeding was 2 seconds, and the feed rate was below 1%, effectively improving the operational efficiency of the pigeon breeding farm.
Keywords: pigeon breeding; intelligent feeding cart; visual recognition; deep learning; ultrasonic testing; infrared tracking
0 引言
随着现代化畜禽业的迅猛发展,畜禽养殖规模也不断扩大。我国鸽子养殖规模占世界鸽子养殖总规模的80%以上,主要集中在新疆、广东、山东、四川和
安徽等地区[1]。据统计,2021年全国鸽子出栏量达6.1亿只,其中广东省全年出栏乳鸽超过3亿只,种鸽存栏量约2 100万对[2]。在庞大的养殖规模下,传统鸽舍+人工喂养的方式已无法满足现代养殖业的需求。为提高养殖效率、降低养殖成本,智能化养殖技术应运而生[3-5],为现代养殖业提供了行之有效的解决方案。
近年来,许多专家学者对智能化养殖进行了大量的研究。李国发等[6]研制蛋鸡智能化养殖系统,实现了定时定量向蛋鸡供水供料。李丽华等[7]根据种鸡个体信息设计精确投料控制系统及机械装置,实现了种鸡饲喂的智能识别、信息传输、自动储存及精确给料。SYAM等[8]设计鸡笼顶部运输饲料机器人,能够平稳地运送饲料。但以上方案都对养殖场地要求较高,且需花费较大的成本进行设备升级[9-11]。
本文设计一种鸽子养殖智能投料小车,采用传感技术和智能控制技术,自动识别鸽子数量,按需投放饲料[12],且不需要对养殖场的设备升级,仅需在现有鸽子养殖场的地面上用黑色胶带标出循迹线,鸽子养殖智能投料小车即可按照循迹线行进。
1 鸽子养殖智能投料小车
1.1 结构与运行原理
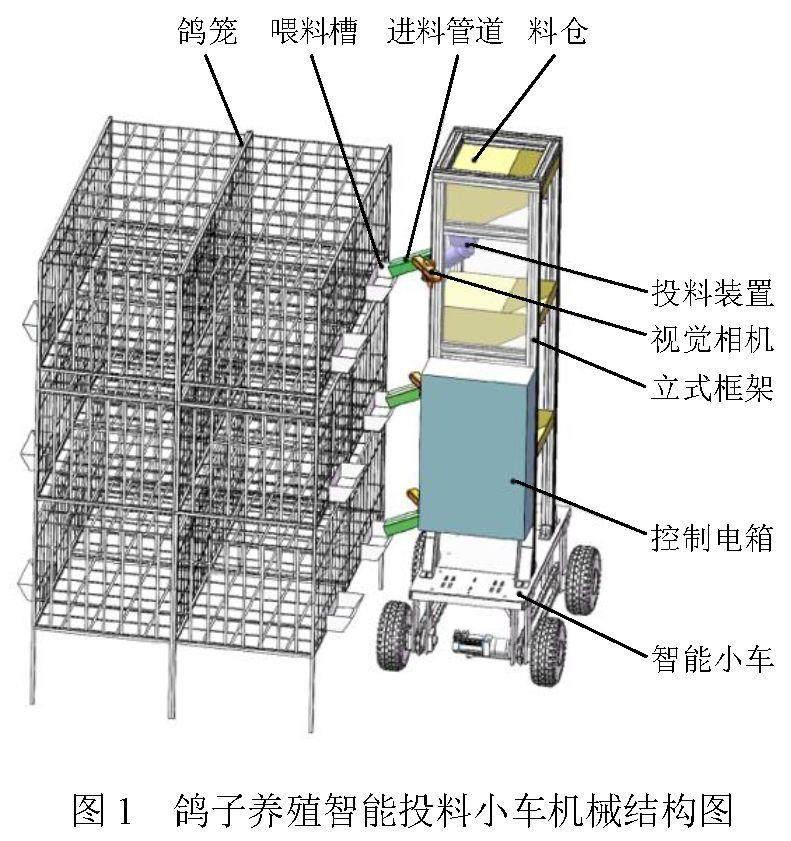
鸽子养殖智能投料小车主要由智能小车、控制电箱、视觉相机、投料装置、料仓、进料管道等组成,如图1所示。
在料仓顶部的开口处进料,料仓底部开有漏料孔;进料管道连接投料装置与喂料槽。根据鸽笼喂料槽的3种不同高度,在鸽子养殖智能投料小车上布置了3套投料装置。视觉相机和投料装置的电控电路置于控
制电箱内,由微型电脑实现传感和控制信号的集中处理。对角线布置的伺服电机通过链传动驱动智能小车行进;当智能小车停在投料位置时,视觉相机对鸽子数量进行精确识别;控制电箱内的STM32单片机通过控制投料装置直流电机的通电时间,控制流入喂料槽内的饲料量。同一列喂料槽投喂完成后,智能小车移动至下一列鸽笼位置,继续执行下一次投料任务。
1.2 控制系统
鸽子养殖智能投料小车控制系统主要包括移动电源模块、运动控制模块、料仓检测模块、投料执行模块和视觉感知模块等,系统结构如图2所示。
移动电源模块负责给鸽子养殖智能投料小车供能;运动控制模块通过RS232控制智能小车的行走和转弯;料仓检测模块检测料仓内剩余饲料量;投料执行模块进行饲料投放;视觉感知模块部署了YOLOv7深度学习模型,可实时检测鸽笼内的鸽子数量和喂料槽位置。
鸽子养殖智能投料小车有遥控和全自动循迹2种工作模式,可通过遥控器控制进入或退出全自动循迹模式。
在遥控模式下,遥控器发送无线信号到运动控制模块;运动控制模块控制伺服电机驱动智能小车行进,实现智能小车的移动控制[13]。当智能小车开始移动时,运动控制模块发送准备接收图像信息的信号到视觉感知模块,驱动视觉相机识别鸽子数量和喂料槽位置,并将识别结果反馈给STM32单片机。当进料管道到达喂料槽前时,STM32单片机驱动继电器控制投料执行模块,使饲料通过进料管道滑入喂料槽中。
在全自动循迹模式下,鸽子智能投料小车跟踪循迹线行进至鸽笼处,感应到横置的循迹线时停止行进;视觉相机识别鸽子数量和喂料槽位置;STM32单片机控制投料及投料时间;完成投料后鸽子养殖智能投料小车继续沿着循迹线移动至下一列鸽笼处,直至完成所有投料任务。
2 投喂装置
投喂装置由料仓、投料装置和进料管道等组成,结构如图3所示。
单位时间的漏料量通过投料装置的调节手柄来调节。当投料装置的直流电机启动后,叶轮旋转将料仓内的饲料通过进料管道导流到喂料槽中。
2.1 投料量测试
鸽子养殖智能投料小车通过12 V 20 AH的锂电池供电。经测试,当锂电池电压降到10 V以下时,电池耗电较快且无法使3个投料装置的直流电机都正常工作。当锂电池供电电压为10 V时,以鸽子数量为参考,投料量和投喂时间的线性变化较为稳定,故3个投料装置直流电机的供电电压均选为10 V。在每个笼室中随机放入1~4只鸽子,对投料装置进行实验测试,得到投料量和投喂时间的关系曲线如图4所示。
由图4可知,鸽子养殖智能投料小车按照平均每次约17 g的投料量进行投喂,每只鸽子的平均投喂时间约为1 s,投喂启动时间约为1 s(鸽子养殖智能投料小车启动后初次落料时,会先往投料装置内填充饲料)。
2.2 投料控制
料仓检测模块通过料仓内的超声波传感器来检测料仓顶端与饲料平面的距离,以此监测饲料的剩余量,并通过串口通信向STM32单片机发送信号。信号分为少(0~62.35 mm)、中(62.35~169.7 mm)、满(大于169.7 mm)3种,分别对应“Low”、“Mid”、“Ful”,显示在OLED屏幕上。
3 智能小车
智能小车主要由车架、链条、托架、车轮、轴承、链轮、减速器和伺服电机等组成,如图5所示。智能小车采用的链式差速驱动与转向结构,可适应工作负载大、运行时间长、环境恶劣的工况条件。
对角线布置的伺服电机和减速器为智能小车提供动力,通过链传动实现智能小车的前进、后退和差速转向等功能。伺服电机选用TSDA-C11A-04C,功率为0.4 W,动力输出轴转速为n = 3 000 r/min,配套减速器的减速比为1∶40。为了增加智能小车的安全性,在遥控模式下,增设转弯“自锁”功能。开启“自锁”功能后,小车无法转弯,防止摇杆误操作等使智能小车突发运动。
为了实现智能小车在全自动循迹模式下的运动控制,需对其进行运动学模型建模。将智能小车在空间的运动简化为在平面坐标系XOY上的运动,智能小车运动学简化模型如图6所示。
图6中和分别为智能小车左右两侧的线速度,与智能小车的质心速度![]() 同向时为正,反向时为负;
同向时为正,反向时为负;![]() 为
为![]() 与坐标系X轴正方向的夹角;B为左侧轮与右侧轮中心距离。
与坐标系X轴正方向的夹角;B为左侧轮与右侧轮中心距离。
智能小车的状态运动方程为
当![]() 时,智能小车直线行进;当
时,智能小车直线行进;当![]() 时,智能小车右转向行进;当
时,智能小车右转向行进;当![]() 时,智能小车左转向行进,当
时,智能小车左转向行进,当![]() 时,智能小车在原地打转。
时,智能小车在原地打转。
运动控制模块通过安装在智能小车前的红外传感器进行移动控制反馈,控制伺服电机的启停与差速转向,使智能小车保持在循迹线上。运动控制模块的循迹程序设有直行、左转、右转、喂料和停止5种状态。假设智能小车行走在喂料槽的右侧方向为正,五路红外传感器在正方向从左向右分别为L2、L1、M、R1、R2,逻辑为1表示识别到循迹线,逻辑为0表示没有识别到循迹线,循迹模式流程如图7所示。
当只有红外传感器M输出1时,智能小车退出流程继续前行。当智能小车小幅偏移循迹线时,将进行小幅度偏移修正,若红外传感器L1输出1,则智能小车右转修正直至只有红外传感器M输出1;若红外传感器R1输出1,则智能小车左转修正直至只有红外传感器M输出1。当智能小车大幅偏移循迹线时,将进行大幅度偏移修正,若红外传感器L2输出0,则智能小车自旋右转修正直至R1输出1,再进入向右小幅度偏移修正环节;若红外传感器R2输出0,则智能小车自旋左转修正,直至L1输出1,再进入向左小幅度偏移修正环节。
4 视觉识别
4.1 YOLOv7深度学习模型网络结构
视觉感知模块采用YOLOv7深度学习模型识别鸽子数量和喂料槽位置。该模型主要包括主干网络(Backbone)、颈部(Neck)和头部(Head)等网络结构,如图8所示。
主干网络对图像数据进行融合,得到融合数据集;颈部网络将视觉相机拍摄的鸽子和喂料槽图像进行特征合并,并将图像特征传输给头部网络;头部网络利用损失函数引导学习过程,从而选出合理的计算结果。在YOLOv7的检测程序中加入结果计数指令,通过统计计数识别的目标标记框,得到鸽子数量。
4.2 评估指标
为了评估YOLOv7深度学习模型的识别性能,采用准确率(Precision, P),召回率(Recall, Rc)作为评价指标,并以综合评价指标(F1)作为准确率和召回率的评估值。
式中:TP 为正确识别鸽子的数量,FP为将非鸽子目标错误识别为鸽子的数量,FN为误将鸽子识别为背景的数量。
4.3 数据集
鸽子和喂料槽图像数据集拍摄于某鸽子养殖场与实验室模拟场景,其中在养殖场拍摄的1 000幅图像用于训练,实验室模拟场景拍摄的300幅图像用于测试。
利用相机平移拍摄某鸽子养殖场的鸽子和喂料槽的图像数据,尽可能地记录鸽子在鸽笼内的姿态,同时将喂料槽包含在图像中,便于后续的标记工作。
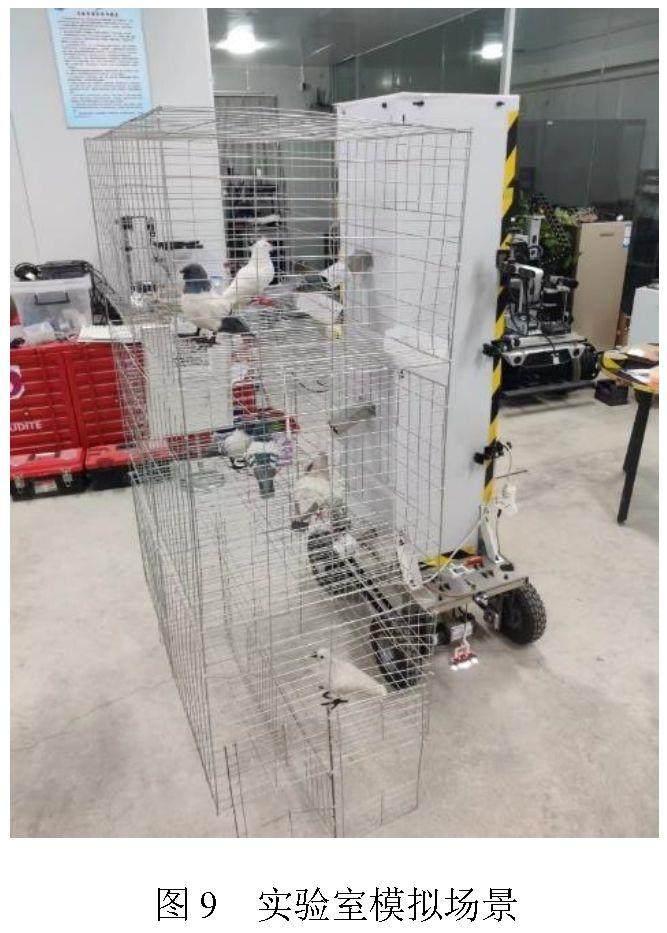
实验室模拟场景如图9所示,其最大程度地复现真实的鸽子养殖场景。将若干形态不同的鸽子随机放入鸽笼,以鸽子的种类、朝向、数量作为变量,每拍摄一幅鸽子图像改变一个变量,以此尽可能地突出鸽子的外表形态特征。同时,尽量多做部位遮挡,使图像中既有全身的鸽子,也有被部分遮挡的鸽子,以便训练的YOLOv7深度学习模型能精确地识别鸽子数量。
4.4 训练与结果
将鸽子和喂料槽图像进行标记后上传至服务器进行模型训练,服务器参数如表1所示。
基于YOLOv7深度学习模型,在服务器的Ubuntu系统进行模拟训练。训练出的模型在室内正常光照与弱光照下识别鸽子和喂料槽的准确率、召回率、F1值分别如表2、3所示。
由表2、3可知,训练后的YOLOv7深度学习模型在室内正常光照下识别准确率为93.36%,在弱光照条件下识别准确率为78.57%,说明该YOLOv7深度学习模型具有较高的识别准确率。
5 实验分析
5.1 场景实验
虽然图9所示的实验室模拟场景在杂乱环境下有利于模型准确率的测试,但该场景不利于鸽子养殖智能投料小车进行投料距离实验和运行精度测试。为了测试鸽子养殖智能投料小车的最佳工作状态,搭建了如图10所示的模拟实验场景,分别开展最佳投料距离实验和运行精度测试,并记录鸽子养殖智能投料小车在各阶段的运行和停留时间。实验场景光照控制在300 Lux,在每个笼室中随机放入0~4只鸽子,并清空喂料槽。每只鸽子每天投喂饲料4次[14],每次投喂饲料约17 g。
5.2 最佳投料距离实验
当智能小车停在鸽笼前时,进料管道不一定对准喂料槽。为使饲料全部落在喂料槽内,测试进料管道与鸽笼的距离。将智能小车与鸽笼的距离从240 mm开始不断缩短,每缩短5 mm进行一次投料,若有饲料没落入喂料槽中,则继续缩短距离。当智能小车与鸽笼的距离为210~225 mm,进料管道与鸽笼的距离为75~90 mm时,进料管道恰好对准喂料槽,饲料全部进入喂料槽内。
5.3 运行精度测试
设鸽笼每个笼室内有4只鸽子,对鸽子养殖智能投料小车的运行精度进行测试。将循迹线布置在距离鸽笼240 mm处;第一条横置的循迹线布置在第一列鸽笼的中心位置前500 mm处,每隔500 mm横置一条循迹线,且横置的循迹线数量等于待识别的鸽笼列数加一。本实验鸽笼列数为4,故横置的循迹线为5条。分别记录智能小车从上一列鸽笼行走至下一列鸽笼的时间![]() 、每列鸽笼的停留时间
、每列鸽笼的停留时间![]() 、鸽子数量识别准确率
、鸽子数量识别准确率![]() 。运行精度测试重复4次,测试平均值如表4所示。
。运行精度测试重复4次,测试平均值如表4所示。
由表4可知,智能小车从上一列鸽笼行走至下一列鸽笼的时间约为3.1 s,每列鸽笼平均停留的时间约为3.9 s。
鸽子人工饲养时,饲养员对每个笼室的平均投料时间为3 s,每一列鸽笼平均投料所需时间约为9 s;从一列鸽笼移步到下一列鸽笼所需时间约为1.8 s。考虑到智能小车的稳定运行,并确保进料管道的饲料完整滑出,鸽子养殖智能投料小车在投料前、投料后均需约0.5 s的缓冲时间。鸽子养殖智能投料小车投料一列鸽笼所需时间为8 s,饲养员投料一列鸽笼所需时间为10.8 s,饲养效率提升了26%。考虑到鸽子养殖智能投料小车可以保持较长时间的稳定准确投料,而人工饲养投喂会因饲养员疲劳导致效率降低,且人工难以把握投料量的精准度。综上所述,鸽子养殖智能投料小车在饲养效率上高于人工饲养,且随着鸽笼列数的增多和每个笼室鸽子数量的增加,鸽子养殖智能投料小车的饲养效率会更高。
6 结论
1) 相比于人工饲养,鸽子养殖智能投料小车通过视觉识别鸽子数量进行精准投料,可减少饲料浪费,饲养效率提升了26%,减少了劳动力成本,具有一定的实用价值。
2) 智能小车通过遥控器操作或跟踪循迹线自动完成行进、转弯和识别喂料等一系列流程,并可以切换遥控和全自动循迹两种工作模式。
3) 实验结果表明,鸽子养殖智能投料小车在全自动循迹时,鸽子和喂料槽的识别准确率达到93.36%,符合鸽子养殖业精细饲喂的要求。
参考文献
[1] 朱静,李婷婷,施寿荣,等.我国鸽、鹌鹑及特种家禽产业发展现状、存在问题及对策[J].中国畜牧杂志,2024,60(1):387-392.
[2] 陈绰琎,邱晓莉,刘延清,等.广东省肉鸽产业提质增效的探索和思考[J].养禽与禽病防治,2023(1):25-27.
[3] 冯大春,刘双印,尹航,等.规模化肉鸽养殖数字化建设及应用示范[J].中国家禽,2022,44(10):112-117.
[4] ZHOU Z, LIU D, SUN H, et al. Pigeon robot for navigation guided by remote control: system construction and functional verification[J]. Journal of Bionic Engineering, 2021,18(1):184-196.
[5] 孟蕊,崔晓东,余礼根,等.畜禽精准饲喂管理技术发展现状与展望[J].家畜生态学报,2021,42(2):1-7.
[6] 李国发,陈国防,王红英.一种蛋鸡智能化养殖设备[P].河南:CN201820354514.0,2018-12-11.
[7] 李丽华,邢雅周,于尧,等.基于超高频RFID的种鸡个体精准饲喂系统[J].河北农业大学学报,2019,42(6):109-114.
[8] SYAM R , ARSYAD H , BAUNA R ,et al.Kinematics Analysis of End Effector for Carrier Robot of Feeding Broiler Chicken System[C]//Journal of Physics Conference Series. IOP Publishing, 2018,962(1):012013.
[9] 马永华,刘茜,于海兰.基于单片机的直流伺服电机调速系统设计[J].电子测试,2021(15):31-32;56.
[10] 刘旭芳,李华.中国肉鸽产业发展现状与前景[J].农业展望, 2021,17(6):57-60.
[11] 单达聪,安源,姜玉贤,等.规模养鸽背喂式自动饲喂机设计与应用[J].饲料工业,2018,39(9):14-19.
[12] 吕钊钦,蔡吉晨,周建军,等.肉鸽规模养殖自动化饲喂装置设计[J].农业工程学报,2014,30(11):30-36.
[13] 夏侯命栋,张雄杰,王鲍,等.基于STM32的5段式S型交流伺服电机控制方法[J].机电工程技术,2023,52(2):42-46.
[14] 朱立学,官金炫,张世昂,等.基于深度学习的肉鸽精准饲喂机器人的研制与试验[J].机电产品开发与创新,2022,35(5): 6-10.
猜你喜欢
中国高新技术企业(2016年34期)2017-02-10
科技视界(2016年26期)2016-12-17
新教育时代·教师版(2016年23期)2016-12-06
法制与社会(2016年32期)2016-12-01
艺术科技(2016年9期)2016-11-18
中国市场(2016年38期)2016-11-15
软件导刊(2016年9期)2016-11-07
软件工程(2016年8期)2016-10-25
今传媒(2016年9期)2016-10-15
科技视界(2016年4期)2016-02-22
