基于改进乌鸦搜索算法的无人艇新型路径规划策略
2024-06-19 21:07:34林蔚青林秀芳陈国童黄惠
重庆大学学报 2024年5期
关键词:路径规划
林蔚青 林秀芳 陈国童 黄惠


doi: 10.11835/j.issn.1000-582X.2023.216
收稿日期:2023-03-25
网络出版日期:2023-07-19
基金项目:国家自然科学青年基金资助项目(52105053);福建省自然科学基金资助项目(2022J011125);闽江学院人才引进资助项目(MJY20029)。
Foundation:Supported by the National Natural Science Youth Foundation of China(52105053), the Natural Science Foundation of the Science and Technology Department of Fujian Province(2022J011125), and Talent Introduction Foundation of Minjiang University(MJY20029).
作者简介:林蔚青(1979—),男,高级工程师,主要从事智能优化算法及海洋工程研究,(E-mail)linweiqing2024@163.com。
通信作者:林秀芳,女,副教授,(E-mail)xiufang_lin2010@163.com。
摘要:鉴于无人艇的实际航行需求,所规划的路径应满足顺滑性和经济性要求,为此提出一种基于改进乌鸦搜索算法和新型路径拟合方法的路径规划策略。文中提出一种新型路径拟合方法,用于优化转向点的数量并对转向点进行圆弧过渡处理,从而缩短路径长度,并保证无人艇在航速稳定的情况下实现转向,在此基础上提出一种改进的乌鸦搜索算法,用于优化路径转向点的位置。算法的改进主要体现在3个方面:采用反向学习策略以提高初始种群质量及多样性;提出一种动态变化的意识概率以提高算法局部和全局的搜索能力;采用莱维飞行策略以改善搜索的方向性和有效性。仿真结果表明,所提出的新型路径拟合方法优于B样条曲线拟合方法和直线段拟合方法。迭代计算和方差分析结果表明:在优化新型拟合路径方面,所提出的改进乌鸦搜索算法相较于标准乌鸦搜索算法、差分进化算法和遗传算法具有更高的收敛精度和鲁棒性,能更高效地处理无人艇路径规划的实际问题。
关键词:无人艇;路径规划;乌鸦搜索算法;反向学习;意识概率
中图分类号:TP273 文献标志码:A 文章编号:1000-582X(2024)05-087-11
A new path planning strategy for unmanned surface vehicle based on improved crow searching algorithm
LIN Weiqing1, LIN Xiufang2, CHEN Guotong1, HUANG Hui3
(1. College of Information and Mechanical & Electrical Engineering, Ningde Normal University, Ningde, Fujian 352000, P. R. China; 2. College of Physics & Electronic Information Engineering, Minjiang University, Fuzhou 350108, P. R. China; 3. College of Mechanical Engineering and Automation, Fuzhou University, Fuzhou 350108, P. R. China)
Abstract: Becaused of the actual navigation requirements of unmanned surface vehicles, the planned path should meet the criteria of smoothness and economy. Therefore, a novel path planning strategy based on an improved crow search algorithm combining straight lines and circular arc turns is proposed. A new path fitting method is introduced to optimize the number of turning points and address the issue of arc transition at turning points. This method overcomes the problem of frequent direction adjustments caused by B-spline curve paths for unmanned surface vehicles, while ensuring that they can achieve steering while maintaining a stable speed, thereby improving navigation stability and economy. Based on this, an improved crow search algorithm is introduced to optimize the location of path turning points. The improvement of the algorithm is mainly reflected in three aspects: the use of a reverse learning strategy to optimize the quality and the diversity of the initial population, the proposal of a dynamically changing awareness probability to improve the global search ability of the initial segment and the local search ability of the final segment of the algorithm, and the utilization of the Levy flight strategy to improve the directionality and the effectiveness of the search. The simulation results show that the proposed new path fitting method is superior to the B-spline curve fitting method and the straight line segment fitting method. Building on this fitting method, the improved crow search algorithm, the standard crow search algorithm, the differential evolution algorithm, and the genetic algorithm are used to optimize the location of the path turning point. Iterative calculation and variance analysis results demonstrate that the proposed improved crow search algorithm exhibits higher convergence accuracy and robustness compared to the other three algorithms, effectively addressing practical problems in unmanned surface vehicle path planning.
Keywords: unmanned surface vehicle; path planning; crow search algorithm; opposition-based learning; awareness probability
近年来,无人艇在科学考察、海洋监测和国防维权等方面的应用日渐广泛,无人艇的相关技术也越来越受到重视。无人艇的自动驾驶技术是无人艇核心技术之一,它主要包含信息采集、信息处理、自主决策、底层控制和船岸通信等方面内容。自主决策主要体现在路径规划上,通过信息处理和各种数学算法生成一条自动航行路线,包括路径信息和航速信息,路径规划不仅关系到无人艇的运行效率,还影响到无人艇的航行安全。路径规划已经成为无人艇自动驾驶的关键技术之一,受到了海内外众多学者的关注[1]。无人艇的路径规划主要涉及路径拟合和路径点位置的全局规划2个方面的技术问题。
目前无人艇路径基本采用直线段拟合方案[2]和B样条曲线拟合方案[3],这2种方案的路径点分别是直线段转向点和曲线采样点,其中直线段拟合路径方案存在折角转弯的问题,即无人艇在转向点处进行转向时,需提前将航速降为零,再进行转向,这无疑影响无人艇航行的顺滑性和经济性;而基于B样条曲线的航行路径,则需要无人艇在航行过程中不停地调整行驶方向,对无人艇的方向定位仪器和自动航行装备的灵敏度和可靠度要求非常高。
对于路径点的全局规划,传统算法主要包括可视图法[4-5]、格栅法[6]、A*算法[7]等。可视图法由于需要不断重构可视图,存在搜索效率低和组合爆炸等问题[8]。格栅法中的网格大小影响搜索精度,网格太大则精度不足,网格太小则需要比较大的存储空间,搜索时间较长。A*算法可以处理复杂环境下的路径规划问题,但存在大量绕弯路径是该算法的一个主要问题。随着智能优化算法的提出和广泛应用,有部分学者已将智能优化算法应用到无人艇路径规划中,如粒子群算法[9-11]、遗传算法[12-14]、灰狼算法[15]等。
乌鸦搜索算法(crow search algorithm,CSA)是由Askarzadeh[16]提出的一种受乌鸦智能行为启示而产生的群体智能优化算法,该算法具有结构简单、参数少和收敛速度快等特点。实验仿真结果表明在解决多种工程问题方面,CSA的优化结果优于遗传算法、粒子群算法与和声搜索算法,已经在一些领域取得了较好的应用成果。Askarzadeh等[17]使用CSA精确预测火力发电厂的输入-输出特性,研究结果表明CSA的性能优于粒子群算法、遗传算法、蜂群算法和最小二乘法。王丽婷等[18]利用CSA对支持向量机进行参数优化,仿真结果表明,与遗传算法和粒子群算法相比,CSA具有更佳的寻优能力和更快的寻优速度。然而,由于标准CSA搜索方式过于简单,导致有时搜索出现算法早熟和收敛精度不足等问题。因此,不少学者相继提出了一些CSA的改进措施。例如,Lin等[19]针对建筑物减震控制中的模糊控制器设计问题,提出一种实值和虚值混合编码的带变异操作的CSA,证明了这种改进CSA的收敛精度和鲁棒性都优于遗传算法;刘雪静等[20]提出了一种二次贪心变异型CSA,并证明了这种改进的CSA比二进制人工蜂群算法更适合求解联盟背包问题;樊英等[21]利用改进的二进制CSA对车载网络频谱分配问题进行优化,结果表明二进制CSA解决了原始CSA收敛速度慢、不稳定和易陷入局部最优等问题。
虽然CSA及其改进算法已在多领域得到成功应用,但鲜有将该算法用于无人艇路径优化方面的研究。文中基于优化设计的思想,在选中某种优化指标的基础上,对CSA进行算法改进,用于优化无人艇路径点的全局规划,此外,针对上述无人艇路径拟合方案的缺陷,提出采用直线与圆弧转弯结合的新型拟合路径方法,最终形成了一种基于改进CSA的无人艇新型路径规划策略,以期能高效处理无人艇航行路径的实际规划问题。
1 新型路径拟合方法
针对直线段拟合路径方案与B样条曲线拟合路径方案的缺陷,文中所提出的新型拟合路径拟合方法在转向点处将采用圆弧转向路径,以解决折角转弯造成的速度损失问题;在非转向部分路径则采用直线段拟合,以解决曲线路径带来的频繁转向问题;对转向点进行优化处理,以减少无人艇变向次数。
步骤1:按路径点形成初始路径(S, P1, P2, …, Pn-1, G)。黑色区域为障碍物,如图1所示,P1、P2、P3、P4、P5、P6、P7为路径转向点。
步骤2:优化路径转向点。由于存在部分多余的转向点,故需从起始点开始依次与后续转向点进行连线,直至与障碍物干涉。如图2中的线段SP4与障碍物干涉了,此时应将前一点P3作为新的第二个转向点,如图3所示;接下来将作为新的起点,重新与后续转向点进行连线,直至与障碍物干涉,如图4中的线段,此时则将前一点P5作为新第二个转向点所示,以此类推,最后得到新的路径,见图5所示。
步骤3:将新的转向点进行圆弧过渡,依据推荐的无人艇的转弯半径r,将转向点改成圆弧过渡,圆弧半径为r,圆弧转化结果见图6所示。
为了验证所提出的新型路径拟合方案的效果,将其与直线段拟合路径方案和B样条曲线拟合路径方案进行比较,结果如图7所示。由图可见,新型拟合路径的长度最短,路径比较顺滑,因此可以减少路径转弯带来的速度损失,如果无人艇转弯半径足够大,则不需要对航速进行调整即可实现无人艇的平稳转向,从而保证航行的经济性。
2 基于改进乌鸦搜索算法的无人艇路径规划
鉴于新型路径拟合方法只是优化路径点数量并处理转向点圆弧过渡的问题,而全局路径点的位置也是决定路径优劣的关键因素之一,为此在新型路径拟合方法的基础上提出一种改进的CSA(improved CSA,ICSA),用于解决路径点位置的优化问题。
2.1 标准CSA
标准CSA是依据乌鸦的智能觅食行为启发提出来的。算法中的乌鸦会记住自己储藏食物的位置,同时会跟踪其余乌鸦,并偷取它们的食物,而被跟踪的乌鸦有一定的概率发现自己被跟踪了,一旦发现,则将跟踪自己的乌鸦带到其他随机位置。依据乌鸦的觅食原理,将每一只乌鸦位置作为一个解,假设种群规模为N,初代乌鸦群的位置(初始解)用表示,表示初代乌鸦记住的藏匿食物最佳位置,且。乌鸦i在第t次迭代时的位置为,食物的储藏位置为,跟踪被发现的意识概率为PA,假设乌鸦i随机选择乌鸦j进行跟踪,根据意识概率可将位置分为以下2种情况:
1)乌鸦j未发现被跟踪,则乌鸦i找到乌鸦j的食物储藏点;
2)乌鸦j发现被跟踪,则乌鸦j将乌鸦i带到随机位置。
乌鸦i的位置更新方法见式(1)和式(2)。
; (1)
。 (2)
式中:ri、rj为[0,1]之间的随机数;为乌鸦i在第t次迭代中的飞行长度。lf一般取为2,依据文献[16-20],当lf=2时搜索边界涵盖了所有的相邻区域;当lf<2时,搜索边界则较小,增加了乌鸦i停在乌鸦i和乌鸦j之间的概率;当lf>2时,搜索边界则较大,增加了乌鸦i越过乌鸦j的概率,故将参数l设定为2;PA为乌鸦j发现被跟踪的概率,为解的适应度。
依据标准CSA的原理,将CSA的优化步骤如下。
步骤1:随机产生初始种群,及初始记忆中的储藏位置
步骤2:依据式(1)和式(2)对乌鸦位置进行更新。
步骤3:判断是否在可行域范围内,如果是,则允许更新位置,否则保持位置不变。
步骤4:计算解对应的适应度值
步骤5:更新记忆中的食物储藏位置,表示第t次迭代中第i只乌鸦的记忆中储藏位置对应的适应度函数值,具体更新策略为
(3)
步骤6:判断是否满足算法收敛条件,如果不满足,则重复执行步骤2~步骤5,直至达到收敛条件。
2.2 改进的CSA
由于CSA调节参数少,易陷入局部解和收敛精度低。故从以下3个方面提出改进方案。
1)利用反向学习算法[22]优化初始种群。初始种群的优劣对算法的优化精度和收敛速度影响较大,多样性较好的初始种群对提升算法性能有很大帮助,而通过随机方式产生种群可能会造成初始种群分布不均,影响种群的多样性,通过反向学习对初始种群进行优化,能有效提高初始种群的有效性。下面为具体的反向学习优化方法。
假设随机初始种群,,n为种群数量,D为解向量的维度,,,则按式(4)计算反向种群:
。 (4)
通过组合种群选择n个适应度较大的乌鸦位置作为新的初始种群。
2)采用动态意识概率替代固定意识概率。由于标准CSA的意识概率PA是按固定概率50%来设定,故搜索过程比较僵化,考虑到初期搜索时需要保证样本的多样性,需增加全局搜索能力,故需减小PA值;后期搜索时需保证收敛速度,故要增大PA值。基于以上考虑,所提出的动态意识概率需满足以下3个条件。
条件1:动态意识概率必须在规定的最大和最小概率之间变化。
条件2:动态意识概率须随着迭代次数的增加而减小。
条件3:在搜索初始阶段PA值应大于50%,在搜索后期PA值应小于50%。
基于以上的3个条件,提出了一种动态意识概率公式,为
。 (5)
根据式(1)和式(2)可知,PA值越大越倾向于全局搜索,越小则越倾向于局部搜索,但考虑到搜索初始阶段也要有一定的局部搜索能力,故将PAmax设定为0.7~0.9;同时也要保证搜索后期也有一定的全局搜索能力,故将PAmin设定为0.1~0.3。由于文中仅是验证所提出的动态意识概率的有效性,则初步选定PAmax=0.8,PAmin=0.2。为了验证式(5)的有效性,将PA与迭代次数t的函数关系表达如图8所示。
从图8中的曲线变化规律可知,迭代次数t=1时,PA为最大值0.8,t=100时,PA为最小值0.2;PA随迭代次数增加而减小;迭代次数t<46,PA均小于0.5,按式(2)进行搜索的概率提高了,从而提高了全局搜索能力;当迭代次数t≥46,PA则开始超过0.5,按式(1)进行搜索的概率提高了,从而提高了收敛速度,增强了局部搜索能力。依据以上分析,该动态意识概率满足了上述的3个条件要求,对CSA的改进有一定的可行性。
3)采用莱维飞行改进随机搜索。莱维飞行是服从莱维分布的随机搜索路径,是一种短距离搜索和偶尔长距离的跳变相间的随机搜索方式,它能够增加种群多样性和扩大搜索范围,常用于改进粒子群、布谷鸟算法等。
莱维飞行位置更新公式为
, (6)
式中:为步长因子,通常根据式(7)来计算;表示点对点的乘积;s为步长。
, (7)
式中:为当前最优解位置;为常数,通常取0.1,随机步长s借助Levy飞行的生成过程,满足
, (8)
式中,μ、v服从参数为、的正态分布
, (9)
, (10)
。 (11)
式中:取常数1.5;为常数1。
2.3 基于ICSA的路径规划优化步骤
在新型路径拟合方法的基础上,ICSA对路径规划的优化按以下步骤进行。
步骤1:随机产生初始种群。
1)在起始点S与终点G之间产生m个纵向等间距分布的随机路径点,与起始点S和终点G组合成为一条初始路径=(S,P1,P2,…,Pm-1,G)=(p1,p2,…,pn),依次产生N条随机路径,进而产生初始种群。
2)依据新型路径拟合方法对路径上的路径点进行优化,形成新型拟合路径。
3)基于新型拟合路径计算路径长度,直接将路径长度作为适应度值f()使用,的适应度值f()的计算见式(12),其中为
, (12)
式中:为第t次迭代中的第i条路径;为第t次迭代中的第i条路径中的第j个转向点;ρ为惩罚因子;为两相邻转向点与之间的障碍物长度。
步骤2:利用反向学习算法对初始种群进行优化,对初始种群P(t=1)、对应的适应度值f()和储藏位置M(t=1)进行更新。
步骤3:设定迭代次数t=1。
步骤4:依据式(5)计算动态意识概率PA。
步骤5:根据式(1)和式(6)将乌鸦位置更新为
步骤6:判断是否在可行域范围内,如果是,则允许更新位置,否则保持位置不变。
步骤7: 依据步骤1中的式(2)和式(3)产生新型拟合路径,再依据式(12)计算适应度值f()。
步骤8:依据式(3)更新乌鸦的食物储藏位置
步骤9:迭代次数增加1,即t=t+1。
步骤10:判断t是否大于总迭代次数T,如果否,则转入步骤4继续进行优化,反之,则输出最优路径(最优的食物储藏位置)和相应结果。
依据上述步骤,基于ICSA的路径规划优化流程如图9所示。
3 仿真实验与分析
为了验证文中所提出的ICSA的性能和新型路径拟合方法的可行性,选择在Matlab仿真环境下进行仿真实验,采用2个场景进行验证,实验的仿真区域尺寸为500×500,起点坐标为[10, 10],终点坐标为[490, 490],单位均为km。假设无人艇航速为60 km/h,且转弯半径为40 km,在这种前提下即可保证无人艇在转向时速度仍然维持不变。为了验证所提出的改进乌鸦搜索算法及其动态意识概率的有效性,将ICSA分为ICSA1和ICSA2,其中ICSA1的改进方面包括采用反向学习算法优化初始种群,以及采用莱维飞行策略改进随机搜索;ICSA2则在ICSA1的基础上,增加了动态意识概率以替换标准CSA的固定意识概率。同时还采用了差分进化算法(difference methods,DE)、遗传算法(genetic algorithm,GA)和标准乌鸦搜索算法(CSA)进行仿真实验。在这些优化算法中均令式(12)中的惩罚因子ρ=200、种群数N=100、最大迭代次数T=200,算法的其余参数见表1所示。由于这些算法都属于随机优化算法,因此对每个算法都进行了20次实验。
针对ICSA2优化得到的最优路径点,分别采用新型路径拟合方法、B样条曲线路径拟合方法、直线段路径拟合方法进行路径拟合,结果如图10所示。由图可见,相较于另外2种拟合方案,利用新型路径拟合方法得到的路径长度明显更短,转向点数量更少,同时也能保证路径的顺滑性,更能满足无人艇航行的实际需求。
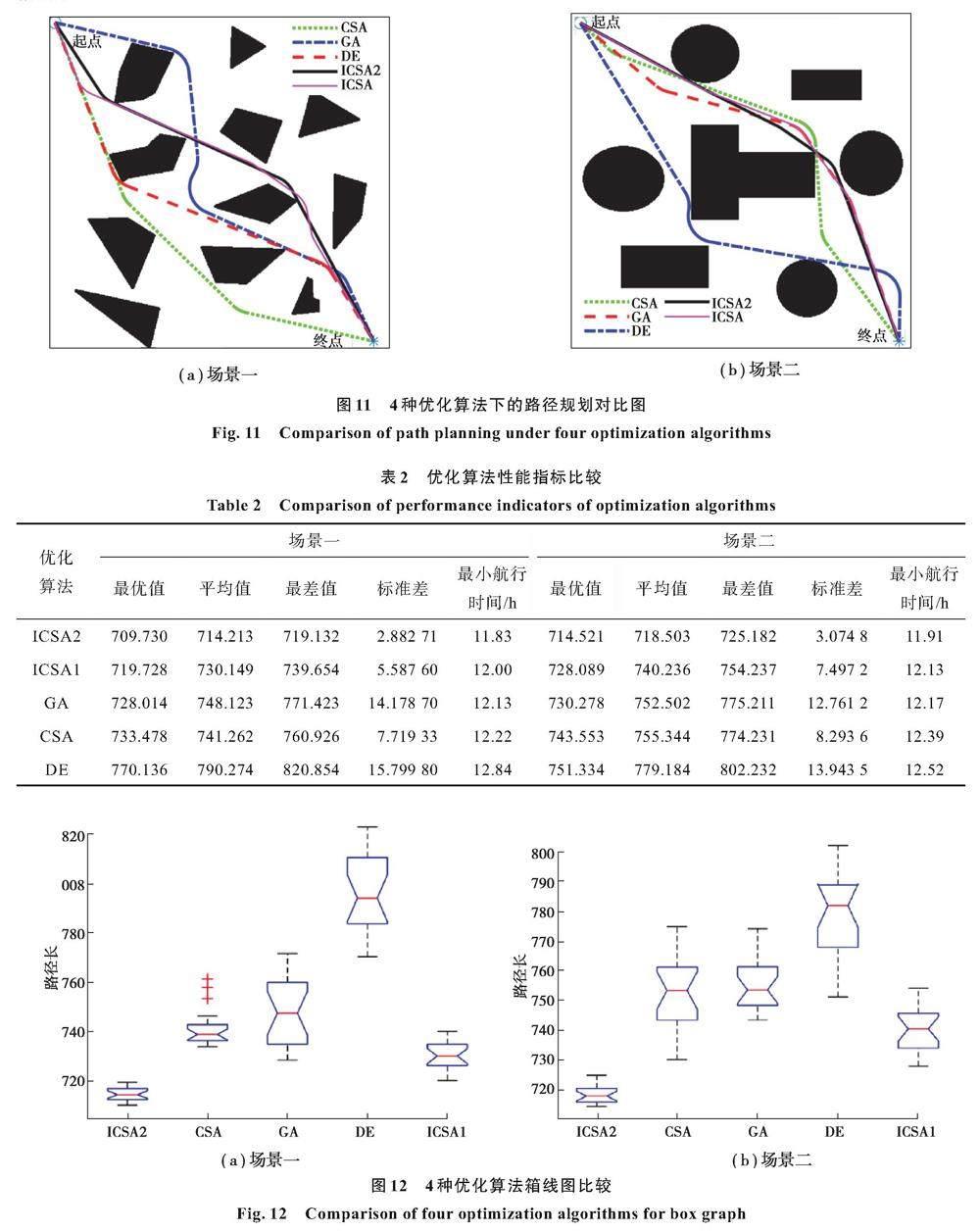
20次实验中各算法优化得到的最佳无人艇路径见图11所示。从图11(a)中可知,ICSA1和DE优化的路径包含有4个转向点,其余3个算法的路径都只有3个转向点;从图11(b)中可知,ICSA1、ICSA2和GA优化的路径包含2个转向点,CSA和DE优化的路径则有3个转向点。
为了进一步进行比较,将不同算法优化得到的路径长度的最优值、平均值、最差值和标准差列入表2中,并利用箱线图(见图12)确定最有效的算法。由表2可见,ICSA2对应的4个指标都是最小值,尤其是路径长度的平均值明显小于另外4种算法。另外在图12中,ICSA2的箱线图最小值和中间值明显小于其余4种算法。这说明与另外4种算法相比,ICSA2的鲁棒性和收敛精度最高,证明了ICSA2在优化无人艇新型拟合路径方面的性能最好,同时也验证了所提出的动态意识概率的有效性。
为了验证ICSA2与另外4种算法是否在性能方面存在显著的差异,采用了方差分析法,设定显著性水平,分析结果见表3所示。表中SS表示离均平方和,df表示自由度,MS表示均方,F值等于组内MS除以组间MS。在分析结果中如果P值小于显著水平,则证明确实存在显著差异。表3中ICSA与另外3种算法比较的P值远小于0.05,表明ICSA2与ICSA1、CSA、GA、DE这4个算法之间都存在着统计学意义上的显著差异。
图13为ICSA2、ICSA1、CSA、GA和DE这5种算法的优化迭代图。由图可知:ICSA2优化的路径最短;ICSA1相较于ICSA,采用反向学习算法对初始种群进行优化后,提高了种群质量,同时采用了莱维飞行策略对随机搜索进行改进,提高了随机搜索的方向性,进而提高了搜索精度;与CSA1相比,ICSA2由于利用了动态意识概率,提高了搜索初始阶段的全局搜索能力和搜索末段的局部搜索能力,从而提高了搜索的效率和精度。
4 结 论
为了解决无人艇路径规划中的2个关键技术问题,实现路径的拟合和路径点位置的全局规划,提出了一种基于改进乌鸦搜索算法的无人艇新型路径规划策略。
1)提出了一种直线与圆弧转弯相结合的新型无人艇路径拟合方法,对路径点数量进行优化,精简了多余的转向点,依据无人艇转弯半径要求,对转向点进行圆弧过渡处理,从而形成了一条短而顺滑的路径。
2)在无人艇新型路径拟合方法的基础上,提出了一种改进的乌鸦搜索算法,实现了转向点位置的全局优化。主要从3个方面进行了优化算法改进:首先,引入了反向学习策略对初始种群进行优化;然后,提出了一种随迭代次数而动态变化的意识概率,以提升迭代初期的全局搜索能力和后期的局部搜索能力;最后,采用了莱维飞行策略对随机搜索进行改进。
3)仿真结果表明:所提出的新型路径拟合方法优于传统的B样条曲线路径拟合方法和直线段路径拟合方案,提高了航行路径的经济性和顺滑性。方差分析结果表明所提出的改进乌鸦搜索算法相较于标准乌鸦搜索算法、遗传算法和差分进化算法,在优化新型拟合路径方面有更强的鲁棒性和更高的收敛精度,能进一步缩短无人艇的航行距离,可进一步改善无人艇自动航行的稳定性和经济性,为无人艇自动航行路径中的关键问题提供了一种有效的解决方案。
所设定的意识概率的最大值PAmax和最小值PAmin对动态意识概率值有直接影响,故下一步将针对意识概率的最大值和最小值对乌鸦搜索算法性能的影响做进一步研究,同时对乌鸦搜索算法做进一步改进;另外由于海上的障碍物并非都是静止不动的,故后期研究方向将针对具有动态避障要求的全局路径规划。此外,后期研究中还将考虑使用模拟船进一步验证路径规划策略的有效性。
参考文献
[1] 吴博, 熊勇, 文元桥. 基于速度障碍原理的无人艇自动避碰算法[J]. 大连海事大学学报, 2014, 40(2): 13-16.
Wu B, Xiong Y, Wen Y Q. Automatic collision avoidance algorithm for unmanned surface vessel based on velocity obstacles[J]. Journal of Dalian Maritime University, 2014, 40(2): 13-16. (in Chinese)
[2] Shah B C, Gupta S K. Long-distance path planning for unmanned surface vehicles in complex marine environment[J]. IEEE Journal of Oceanic Engineering, 2020, 45(3): 813-830.
[3] Wang Z, Li G F, Ren J. Dynamic path planning for unmanned surface vehicle in complex offshore areas based on hybrid algorithm[J]. Computer Communications, 2021, 166(17): 49-56.
[4] Niu H L, Lu Y, Savvaris A, et al. An energy-efficient path planning algorithm for unmanned surface vehicles[J]. Ocean Engineering, 2018, 161: 308-321.
[5] Bertsekas D P. Robust shortest path planning and semicontractive dynamic programming[J]. Naval Research Logistics (NRL), 2019, 66(1): 15-37.
[6] 邢博闻, 杨柳, 胡庆松, 等. 无人船全覆盖路径规划算法研究[J]. 兵器装备工程学报, 2022, 43(9): 28-33.
Xing B W, Yang L, Hu Q S, et al. Research of unmanned ship based on artificial bee colony method[J]. Journal of Ordnance Equipment Engineering, 2022, 43(9): 28-33.
[7] Long Y, Zuo Z M, Su Y X, et al. An A*-based bacterial foraging optimisation algorithm for global path planning of unmanned surface vehicles[J]. Journal of Navigation, 2020, 73(6): 1247-1262.
[8] 周利坤, 刘宏昭. 自适应人工鱼群算法在清罐移动机器人路径规划中的应用[J]. 机械科学与技术, 2012, 31(7): 1085-1089.
Zhou L K, Liu H Z. An adaptive artificial fish school algorithm for path planning of mobile tank-clearing robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2012, 31(7): 1085-1089. (in Chinese)
[9] Ma Y, Hu M Q, Yan X P. Multi-objective path planning for unmanned surface vehicle with currents effects[J]. ISA Transactions, 2018, 75: 137-156.
[10] Wang C, Mao Y S, Du K J. Simulation on local obstacle avoidance algorithm for unmanned surface vehicle[J]. International Journal of Simulation Modelling, 2016, 15(3): 460-472.
[11] Zhong J B, Li B Y, Li S X, et al. Particle swarm optimization with orientation angle-based grouping for practical unmanned surface vehicle path planning[J]. Applied Ocean Research, 2021, 111: 102658.
[12] 谢冲冲, 李莹. 基于改进算法的移动机器人路径规划[J]. 重庆大学学报, 2021, 44(12): 140-148.
Xie C C, Li Y. Path planning of mobile robots based on improved algorithm[J]. Journal of Chongqing University, 2021, 44(12): 140-148. (in Chinese)
[13] Kim H, Kim S H, Jeon M, et al. A study on path optimization method of an unmanned surface vehicle under environmental loads using genetic algorithm[J]. Ocean Engineering, 2017, 142: 616-624.
[14] Guo H, Mao Z Y, Ding W J, et al. Optimal search path planning for unmanned surface vehicle based on an improved genetic algorithm[J]. Computers & Electrical Engineering, 2019, 79: 106467.
[15] 刘志强, 何丽, 袁亮, 等. 采用改进灰狼算法的移动机器人路径规划[J]. 西安交通大学学报, 2022, 56(10): 49-60.
Liu Z Q, He L, Yuan L, et al. Path planning of mobile robot based on TGWO algorithm[J]. Journal of Xian Jiaotong University, 2022, 56(10): 49-60. (in Chinese)
[16] Askarzadeh A. A novel metaheuristic method for solving constrained engineering optimization problems: crow search algorithm[J]. Computers & Structures, 2016, 169: 1-12.
[17] Askarzadeh A, Gharibi M. Accurate estimation of cost function parameters for thermal power plants using a novel optimization approach[J]. Energy Sources, Part A: Recovery, Utilization, and Environmental Effects, 2018, 40(19/24): 2986-2999.
[18] 王丽婷, 张金鑫, 张金华. 乌鸦搜索算法在SVM参数优化中的应用[J]. 计算机工程与应用, 2019, 55(21): 214-219.
Wang L T, Zhang J X, Zhang J H. Application of crow search algorithm in SVM parameter optimization[J]. Computer Engineering and Applications, 2019, 55(21): 214-219. (in Chinese)
[19] Lin X F, Chen S M, Lin W Q. Modified crow search algorithm-based fuzzy control of adjacent buildings connected by magnetorheological dampers considering soil-structure interaction[J]. Journal of Vibration and Control, 2021, 27(1/2): 57-72.
[20] 刘雪静, 贺毅朝, 吴聪聪. 求解集合联盟背包问题的二次贪心变异乌鸦算法[J]. 微电子学与计算机, 2018, 35(11): 13-19.
Liu X J, He Y C, Wu C C. Quadratic greedy mutated crow search algorithm for solving set-union knapsack problem[J]. Microelectronics & Computer, 2018, 35(11): 13-19. (in Chinese)
[21] 樊英, 张达敏, 陈忠云, 等. 基于改进乌鸦算法的车载网络频谱分配方案[J]. 计算机科学, 2020, 47(12): 273-278.
Fan Y, Zhang D M, Chen Z Y, et al. Spectrum allocation scheme of vehicular ad hoc networks based on improved crow search algorithm[J]. Computer Science, 2020, 47(12): 273-278. (in Chinese)
[22] Rahnamayan S, Tizhoosh H R, Salama M M A. Opposition-based differential evolution[J]. IEEE Transactions on Evolutionary Computation, 2008, 12(1): 64-79.
(编辑 詹燕平)
猜你喜欢
物联网技术(2016年12期)2017-01-21 21:28:10
中国新通信(2016年22期)2017-01-13 09:15:21
电脑知识与技术(2016年28期)2016-12-21 13:11:43
电子技术与软件工程(2016年20期)2016-12-21 10:52:33
科技视界(2016年26期)2016-12-17 15:53:57
电脑知识与技术(2016年26期)2016-11-25 00:00:00
科技视界(2016年20期)2016-09-29 12:00:43
电脑知识与技术(2016年17期)2016-07-23 20:25:51
电脑知识与技术(2016年13期)2016-06-29 20:13:01
中国科技博览(2016年3期)2016-04-25 17:11:10