考虑离合器摩擦性能衰减的湿式DCT车辆起步控制研究
2024-06-19 17:37:38饶坤胡明辉秦大同
重庆大学学报 2024年5期
关键词:鲁棒控制
饶坤 胡明辉 秦大同

doi: 10.11835/j.issn.1000-582X.2022.118
收稿日期:2022-02-28
网络出版日期:2022-06-23
基金项目:国家自然科学基金资助项目(52072053);重庆市技术创新与应用发展专项重大主题专项(cstc2019jscx-zdztzxX0047)。
Foundation:Supported by National Natural Science Foundation of China (52072053), and Special Fund for Technology Innovation and Application Development of Chongqing Municipality (cstc2019jscx-zdztzxX0047).
作者简介:饶坤(1996—),男,硕士研究生,主要从事车辆动力传动及控制研究,(E-mail) 728975269@qq.com。
通信作者:胡明辉,男,教授,博士生导师,(E-mail) minghui_h@163.com。
摘要:建立了考虑离合器摩擦系数变化及离合器性能衰减的湿式双离合变速器(dual clutch transmission,DCT)车辆起步过程动力学模型,以车辆起步过程冲击度、滑摩功和起步滑摩时间为优化目标,采用线性二次型最优控制方法获得了车辆起步过程离合器最优传递转矩。针对离合器摩擦系数变化及离合器性能衰减对车辆起步过程离合器压力控制的影响,提出了一种离合器压力非线性鲁棒控制策略,以实现对离合器最优传递转矩的跟踪。结果表明,所提出的非线性鲁棒控制策略能够在离合器摩擦系数变化的情况下实现对离合器最优传递转矩的有效跟踪,跟踪误差不大于0.02 N·m,且能够适应摩擦性能衰减导致不同寿命阶段摩擦系数的不同变化规律,与比例-积分-微分(proportion-integral-differential,PID)控制策略相比具有更精确的控制效果和更强的鲁棒性。
关键词:湿式双离合器变速器;起步;摩擦性能衰减;鲁棒控制
中图分类号:U463.212 文献标志码:A 文章编号:1000-582X(2024)05-057-10
Starting control of wet DCT vehicle considering clutch friction performance attenuation
RAO Kun, HU Minghui, QIN Datong
(State Key Laboratory of Mechanical Transmissions, Chongqing University, Chongqing 400044, P. R. China)
Abstract: A dynamic model of the starting process for a wet dual clutch transmission (DCT) vehicle, reflecting changes in clutch friction coefficient and the attenuation of clutch performance, is established. Taking minimum jerk intensity, friction work and starting sliding time as optimization objectives, the optimal transmission torque of the clutch during the vehicle starting process is determined by using the linear quadratic regulator (LQR). To address the impact of clutch performance attenuation and the variation of clutch friction coefficient with the sliding velocity on clutch pressure control, a nonlinear robust control strategy for clutch pressure is proposed. This strategy is designed to track the optimal transmission torque obtained by LQR. Results show that the proposed strategy can effectively track the optimal transmission torque even under changes in clutch friction coefficient, with an average tracking error of about 0.02 N·m. In comparison with the PID control strategy, it exhibits a more accurate control effect and greater robustness.
Keywords: wet dual clutch transmission; starting; attenuation of friction performance; robust control
双离合器式自动变速器(dual clutch transmission, DCT)兼具手动变速器(mechanical transmission,MT)换挡效率高、经济性好和自动变速器(automatic transmission,AT)换挡过程无动力中断等特点,且具有更快的响应,可提高车辆动力性和燃油经济性,目前已得到广泛使用[1]。DCT车辆起步过程中的离合器控制一直是DCT开发的关键和难点,控制效果的好坏直接影响到DCT车辆的起步品质[2]。
针对湿式DCT车辆起步过程控制问题,目前采用的方法主要有3种:基于经验的规则控制、模糊控制和二次型最优控制。刘增印[3]基于“快-慢-快”规律制定了基于经验的离合器控制策略。Tanaka等[4]基于驾驶员经验建立了模糊规则库,依据驾驶员踏板操作确定离合器压力。吴光强等[5]在综合考虑驾驶员的起步意图和车辆负载的基础上研究了双离合器协同起步过程,提出了基于模糊控制和神经网络的智能控制策略。基于经验的规则控制和模糊控制的离合器控制策略易于实现,但难以适应复杂工况,实际使用中局限性明显。
Glielmo等[6]引入最小值原理,以实现滑摩功和冲击度最小为目标,得到起步过程中离合器接合最优轨迹。秦大同等[7]采用线性二次型最优(LQR)控制方法,将冲击度转换为最优控制的约束条件,以滑摩功最小为目标实现离合器最优起步控制。张志刚等[8]采用LQR控制方法确定离合器目标转矩,并采用遗传算法(genetic algorithm,GA)对LQR中的加权矩阵Q、R进行最优选择。LQR控制一般不考虑离合器摩擦系数变化或将其视为定值,但摩擦系数在实际运行中是动态实时变化的,且变化规律随摩擦性能衰减而改变。因此,仅通过LQR确定的最优控制往往难以实现对最优传递转矩的有效跟踪。秦大同等[9]将与离合器性态变化相关项定义为不确定项,结合自适应滑模控制器获得离合器油压的自适应控制律,但未探究离合器摩擦系数实际变化及摩擦性能衰减规律。Cheng等[10]提出一种基于反步法与H∞控制的DCT换挡自适应控制方法,但控制器参数需根据离合器性态变化进行模糊迭代。
笔者在离合器摩擦性能试验的基础上,建立包含变摩擦系数模型的湿式DCT车辆起步动力学模型,并基于LQR控制方法确定起步过程的最优离合器传递转矩。在此基础上,考虑离合器摩擦系数变化和摩擦性能衰减带来的离合器转矩控制不确定性,基于李雅普洛夫方法设计一种离合器压力非线性鲁棒控制器,在摩擦系数实时变化的情况下实现对离合器最优传递转矩的精准跟踪,且在不改变控制参数的情况下能适应离合器不同使用寿命阶段的摩擦系数变化规律,保证控制效果稳定,具有较强的鲁棒性。所提出控制策略主要针对湿式DCT车辆单离合器起步工况,也适用于搭载湿式离合器的电控机械自动变速箱(automated mechanical transmission,AMT)的车辆起步控制。
1 湿式DCT车辆起步动力学模型
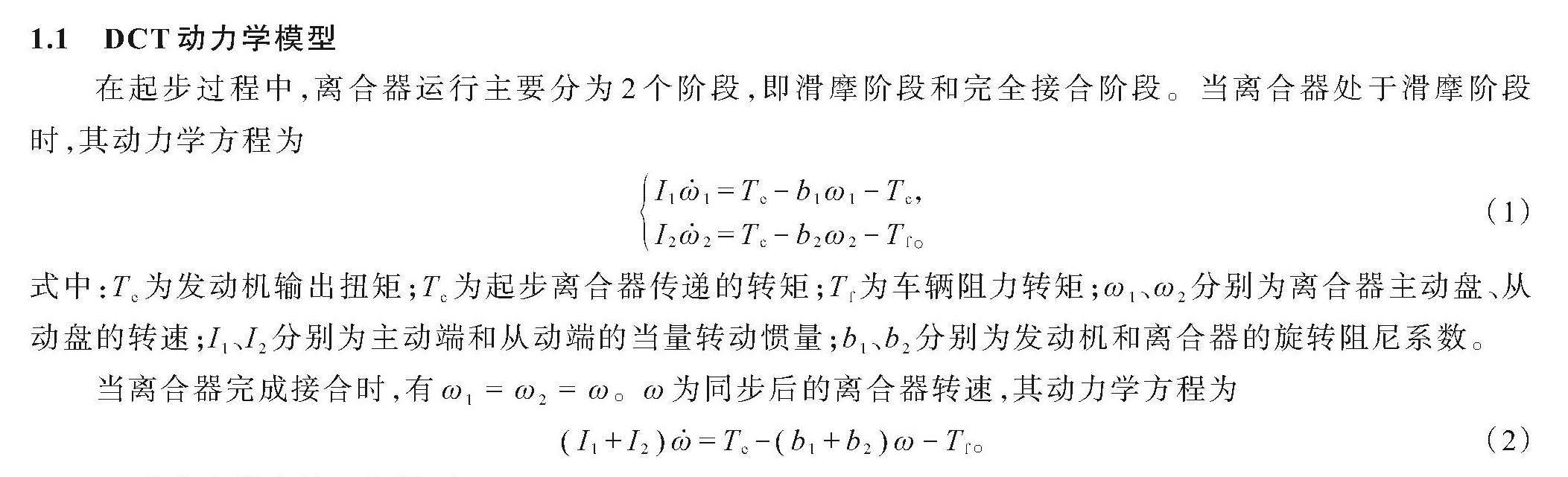
1.1 DCT动力学模型
在起步过程中,离合器运行主要分为2个阶段,即滑摩阶段和完全接合阶段。当离合器处于滑摩阶段时,其动力学方程为
(1)
式中:为发动机输出扭矩;为起步离合器传递的转矩;为车辆阻力转矩;、分别为离合器主动盘、从动盘的转速;、分别为主动端和从动端的当量转动惯量;、分别为发动机和离合器的旋转阻尼系数。
当离合器完成接合时,有。为同步后的离合器转速,其动力学方程为
。 (2)
1.2 湿式离合器摩擦系数模型
湿式离合器的摩擦系数并非定值,而是实时动态变化的。这个变化分为2个维度,一方面,在短时间内摩擦系数μ随离合器主从动盘转速差Δω、离合器压力P和离合器温度T等因素的变化而变化,可以表示为;另一方面,随着接合分离次数增加,湿式离合器摩擦性能衰减,导致摩擦系数变化规律发生改变[11]。
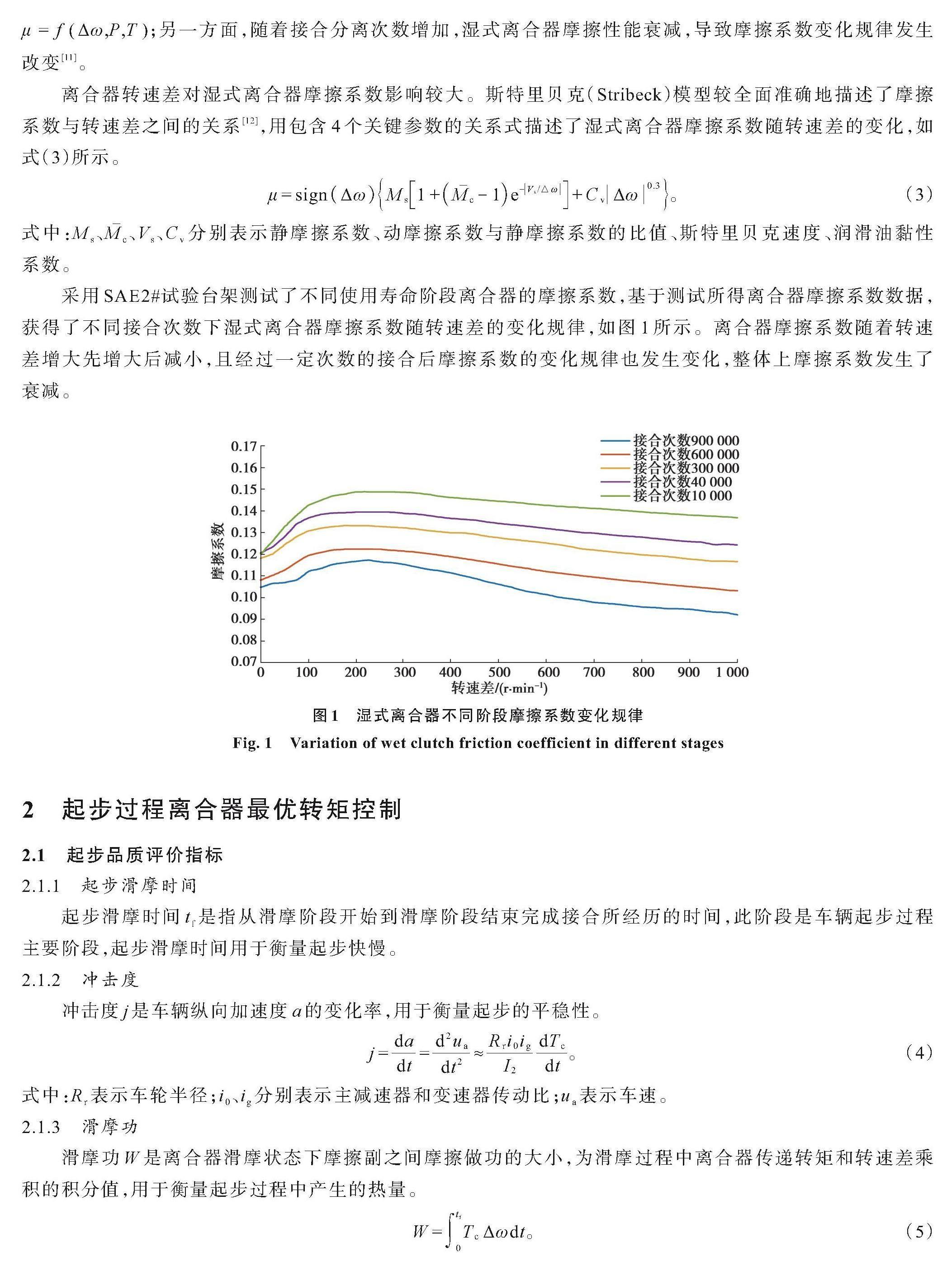
离合器转速差对湿式离合器摩擦系数影响较大。斯特里贝克(Stribeck)模型较全面准确地描述了摩擦系数与转速差之间的关系[12],用包含4个关键参数的关系式描述了湿式离合器摩擦系数随转速差的变化,如式(3)所示。
。 (3)
式中:、、、分别表示静摩擦系数、动摩擦系数与静摩擦系数的比值、斯特里贝克速度、润滑油黏性系数。
采用SAE2#试验台架测试了不同使用寿命阶段离合器的摩擦系数,基于测试所得离合器摩擦系数数据,获得了不同接合次数下湿式离合器摩擦系数随转速差的变化规律,如图1所示。离合器摩擦系数随着转速差增大先增大后减小,且经过一定次数的接合后摩擦系数的变化规律也发生变化,整体上摩擦系数发生了衰减。
2 起步过程离合器最优转矩控制
2.1 起步品质评价指标
2.1.1 起步滑摩时间
起步滑摩时间是指从滑摩阶段开始到滑摩阶段结束完成接合所经历的时间,此阶段是车辆起步过程主要阶段,起步滑摩时间用于衡量起步快慢。
2.1.2 冲击度
冲击度j是车辆纵向加速度的变化率,用于衡量起步的平稳性。
。 (4)
式中:表示车轮半径;、分别表示主减速器和变速器传动比;表示车速。
2.1.3 滑摩功
滑摩功W是离合器滑摩状态下摩擦副之间摩擦做功的大小,为滑摩过程中离合器传递转矩和转速差乘积的积分值,用于衡量起步过程中产生的热量。
。 (5)
2.2 基于LQR的离合器转矩控制
起步过程的关键为控制离合器传递转矩,使起步滑摩时间、冲击度和滑摩功等起步评价指标在滑摩阶段达到最优。以双离合器1挡起步为例,得到起步过程控制的状态空间方程
(6)
式中:x为系统状态变量,,=,=-,=;u为控制变量,u=[];A、B分别为状态矩阵和控制矩阵;为扰动变量矩阵;C为输出系数矩阵;y为输出变量。将发动机输出扭矩和车辆阻力转矩视为扰动变量,可将离合器系统滑摩阶段动力学方程式改写为
(7)
起步控制过程的目标函数如下,积分项中的第1项、第2项、第3项分别反映起步滑摩时间、滑摩功、冲击度等指标的大小。
。 (8)
式中:q1、q2、r分别为目标函数中3个积分项的加权系数。
构造哈密尔顿函数如下:
。 (9)
式中,λ为协状态函数,与x和Γ齐次。取λ为
。 (10)
式中:p和h为待求解系数矩阵。
根据控制方程极值条件,得到
。 (11)
解得
。 (12)
式中,u*为最优控制。
式(10)中的p可通过式(13)的黎卡提方程求解,黎卡提方程可在Matlab中用lqr函数命令求解。
。 (13)
式中,Q为权值系数矩阵,。
式(10)中的h通过状态方程和协状态方程极值条件求解:
。 (14)
将p和h代入式(10),可得最优控制律为:
。 (15)
对最优控制积分即可求得起步过程中离合器最优传递转矩。
3 考虑离合器摩擦性能衰减的起步过程离合器压力自适应控制策略
通过线性二次型最优方法获得离合器最优传递转矩后,需要控制离合器压力来实现对最优转矩的跟踪。滑摩阶段离合器传递转矩由离合器摩擦系数μ、离合器压力P和离合器结构参数共同决定。
。 (16)
式中:z为离合器摩擦面个数;R为离合器等效半径。若摩擦系数恒定且已知,最优转矩和离合器结构参数已知,即可得到最优压力。但实际运行过程中湿式离合器的摩擦系数并非恒定,且变化规律随着离合器的衰减而不同,给控制系统带来非线性。已有方法用PID控制器实现对最优轨迹的跟踪,但PID控制器跟踪效果有限,且相同控制参数无法适应不同阶段摩擦系数的变化规律,需要进行实时调校。
根据李雅普洛夫方法设计一种未知输入观测器和非线性控制相结合的自适应鲁棒控制器来跟踪离合器最优传递转矩,不仅能实现良好的跟踪效果,且能适应不同阶段的离合器摩擦系数变化规律。由于离合器传递转矩无法实时测量,故通过对可测状态变量离合器从动盘转速的跟踪间接实现对离合器最优传递转矩的跟踪。
3.1 离合器压力非线性鲁棒控制器设计
定义跟踪误差为
(17)
式中,为离合器最优传递转矩对应的离合器从动端转速。
对跟踪误差求导得
。 (18)
得到新的系统动力学方程式如下:
。 (19)
式中:离合器摩擦系数是不确定的变化值,离合器压力为需要设计的控制量。
根据李雅普洛夫定理,需要找到一个李雅普洛夫函数,满足是正定的,且是负定的,则系统是渐进稳定的,即满足跟踪误差。
构造李雅普洛夫函数如下:
。 (20)
对求导得
。 (21)
当时,有,满足正定,且负定;为控制参数。设计控制律为
。 (22)
3.2 未知输入观测器设计
由于摩擦系数是未知的,以上控制律仍然无法实现。设计一个未知输入观测器获得摩擦系数变化对系统的影响,观测系统如下:
(23)
式中:为静摩擦系数值,在观测系统中为恒定值;、、、分别为离合器主、从动盘转速及其变化率的观测值。
实际系统为
(24)
实际系统中摩擦系数是实时变化的。
定义为摩擦系数变化值,
, (25)
则对于实际系统有
。 (26)
将(23)式代入得
。 (27)
整理(27)式得
。 (28)
令,则可将式(22)中控制律改写为
。 (29)
4 仿真验证
根据湿式DCT车辆起步动力学方程和湿式DCT工作原理,利用Matlab/Simulink建立湿式DCT车辆起步过程控制策略仿真模型,控制系统结构如图2所示。图中,、、分别为离合器目标传递转矩、发动机目标转速、离合器从动端目标转速。起步开始时发动机采用恒转速控制策略迅速到达目标转速,通过调节节气门开度控制发动机转矩跟踪发动机目标转速[13],线性二次型最优控制器根据系统状态变量和最优反馈控制律得到离合器最优传递转矩,非线性鲁棒控制器对离合器最优传递转矩进行跟踪输出最优离合器压力。
以发动机目标转速1 300 r?min-1为例,通过线性二次型最优控制得到的离合器最优传递转矩和离合器主、从动盘最优转速如图3所示。
为验证提出的非线性鲁棒控制策略的控制效果及适应不同阶段离合器摩擦系数变化规律的鲁棒性,首先将设计的非线性鲁棒控制器和经过参数调校的PID控制器对经过10 000次接合的离合器的跟踪效果进行对比,然后比较对摩擦性能衰减后的不同寿命阶段的离合器的跟踪和控制效果,验证其鲁棒性。
4.1 非线性鲁棒控制与PID控制效果比较
图4为所设计的未知输入观测器的观测效果,可以看出,观测器可以有效观测出摩擦系数变化值,摩擦系数观测值与真实值基本重合,观测值与真实值的误差在±1.2×10-13之内,基本可忽略不计。
将开环控制策略、PID控制策略、非线性鲁棒控制策略的仿真结果进行对比,结果如图5和表1所示。可见3种策略都能实现离合器同步完成起步过程,提出的非线性鲁棒控制策略能实现对离合器最优传递转矩和最优轨迹的良好跟踪,离合器传递转矩跟踪误差在0.02 N?m以内,其余指标与跟踪目标基本一致。开环控制和PID控制在离合器同步瞬间均产生了较大的冲击,最大冲击度分别达到了-17.97 m·s-3和-19.63 m·s-3,远大于目标值-0.74 m·s-3,主要原因是即将同步时离合器主、从动盘转速差接近零,摩擦系数和离合器运动状态发生突变,产生较大冲击度,开环控制和PID控制无法适应摩擦系数的快速变化实现对离合器传递转矩的跟踪,导致离合器转矩发生突变。所提出的非线性鲁棒控制策略能实现对离合器最优传递转矩的有效跟踪,避免在完成接合瞬间发生转矩突变,从而大幅降低冲击度。由于无法实现对离合器传递转矩的跟踪,开环控制和PID控制的起步滑摩时间和滑摩功2项指标也比跟踪目标略差,其中开环控制滑摩功增加了147 J,起步滑摩时间延长了0.7 s,PID控制滑摩功增加了36 J,起步滑摩时间延长了0.3 s。
4.2 鲁棒性验证
摩擦系数变化规律随着离合器摩擦性能衰减在不同的使用寿命阶段会发生改变,而固定增益的PID控制无法较好适应不同的工况。图6为不同寿命阶段离合器在固定增益的PID控制和固定参数非线性鲁棒控制结果的比较,在不同工况下固定增益PID控制器的离合器转速和传递转矩存在较明显的差距,而所设计的非线性鲁棒控制器在不同工况下控制效果基本一致。可见,所提出的非线性鲁棒控制有较好的鲁棒性,能够适应离合器摩擦性能衰减后不同寿命阶段的摩擦系数变化。
5 结 论
提出了一种考虑离合器摩擦系数变化及摩擦性能衰减的湿式DCT车辆起步过程离合器压力非线性鲁棒控制方法,针对湿式DCT车辆起步过程中离合器摩擦系数不确定带来的离合器控制问题,在线性二次型最优控制得出起步过程离合器最优传递转矩的基础上,考虑离合器摩擦系数变化对离合器压力控制的影响,基于李雅普洛夫方法制定了离合器压力非线性鲁棒控制策略,并建立了湿式DCT车辆起步过程仿真模型,在离合器摩擦系数变化和离合器摩擦性能衰减的条件下对所提出的离合器压力自适应鲁棒控制策略进行了仿真验证。结果表明,提出的控制策略能够在离合器摩擦系数变化的情况下实现对滑摩过程中离合器最优传递转矩的有效跟踪,且在离合器摩擦性能衰减后的不同寿命阶段仍能保证良好的控制效果,提高了车辆的起步品质。
参考文献
[1] 赵治国, 仇江海. DCT车辆起步及换挡过程双离合器H∞鲁棒控制[J]. 中国机械工程, 2012, 23(6): 745-751.
Zhao Z G, Qiu J H. H∞ robust control for twin clutches of DCT during vehicles starting and shifting processes[J]. China Mechanical Engineering, 2012, 23(6): 745-751. (in Chinese)
[2] Zhao Z G, He L, Zheng Z X, et al. Self-adaptive optimal control of dry dual clutch transmission (DCT) during starting process[J]. Mechanical Systems and Signal Processing, 2016, 68/69: 504-522.
[3] 刘增印. 基于模型的离合器起步控制参数优化方法研究[D]. 长春: 吉林大学, 2018.
Liu Z Y. Research on model-based parameter optimization method of clutch starting control[D]. Changchun: Jilin University, 2018. (in Chinese)
[4] Tanaka H, Wada H. Fuzzy control of clutch engagement for automated manual transmission[J]. Vehicle System Dynamics, 1995, 24(4/5): 365-376.
[5] 吴光强, 司建玉. 双离合器自动变速器起步的智能控制策略[J]. 同济大学学报(自然科学版), 2012, 40(1): 81-87.
Wu G Q, Si J Y. Launching intelligent control strategy for dual clutch transmission[J]. Journal of Tongji University (Natural Science), 2012, 40(1): 81-87. (in Chinese)
[6] Glielmo L, Vasca F. Optimal control of dry clutch engagement[J]. Journal of Passenger Cars: Mechanical Systems Journal, 2000, 109: 1233-1239.
[7] 秦大同, 陈清洪. 基于最优控制的AMT/DCT离合器通用起步控制[J]. 机械工程学报, 2011, 47(12): 85-91.
Qin D T, Chen Q H. Universal clutch starting control of AMT/DCT automatic transmission based on optimal control[J]. Journal of Mechanical Engineering, 2011, 47(12): 85-91. (in Chinese)
[8] 张志刚, 陈金晶, 姚炼红, 等. 基于GA-LQR两挡DCT离合器目标转矩控制[J]. 机械传动, 2020, 44(3): 28-33.
Zhang Z G, Chen J J, Yao L H, et al. Target torque control of two-speed DCT clutch based on GA-LQR[J]. Journal of Mechanical Transmission, 2020, 44(3): 28-33. (in Chinese)
[9] 秦大同, 简军杭, 程坤, 等. 基于扩展状态观测器和滑模控制的双离合器自动变速器起步自适应控制[J]. 中国公路学报, 2021, 34(9): 39-50.
Qin D T, Jian J H, Cheng K, et al. Adaptive starting control of dual clutch transmission based on extended state observer and sliding-mode control[J]. China Journal of Highway and Transport, 2021, 34(9): 39-50. (in Chinese)
[10] Cheng K, Qin D T, Jian J H, et al. Adaptive gearshift control of wet dual clutch transmission based on extended state observer and H∞ robust control[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2021, 235(22): 6586-6598.
[11] Iqbal S, Janssens T, Desmet W, et al. Transmitted power and energy flow behavior of degrading wet friction clutches[J]. International Journal of Applied Research in Mechanical Engineering, 2012: 286-291.
[12] Al-Bender F, Lampaert V, Swevers J. The generalized Maxwell-slip model: a novel model for friction simulation and compensation[J]. IEEE Transactions on Automatic Control, 2005, 50(11): 1883-1887.
[13] 胡建军, 胡宏奎, 伍国强, 等. 重型商用车AMT自动控制策略及试验分析[J]. 重庆大学学报, 2010, 33(6): 31-41.
Hu J J, Hu H K, Wu G Q, et al. Automatic control strategy and its test analysis for the heavy truck AMT[J]. Journal of Chongqing University, 2010, 33(6): 31-41. (in Chinese)
(编辑 罗敏)
猜你喜欢
制造技术与机床(2019年9期)2019-09-10 07:36:30
自动化学报(2019年6期)2019-07-23 01:18:22
北京航空航天大学学报(2018年1期)2018-04-20 06:38:13
中国现代教育装备(2017年17期)2017-01-28 19:17:54
计算技术与自动化(2016年4期)2017-01-11 14:01:31
厦门理工学院学报(2016年1期)2016-12-01 04:50:41
北京航空航天大学学报(2016年7期)2016-11-16 01:51:01
中国科技博览(2016年26期)2016-10-24 18:17:55
系统工程与电子技术(2016年4期)2016-08-24 07:46:18
自动化学报(2016年3期)2016-08-23 12:02:52