考虑车辆运动预测的AEB系统控制策略
2024-06-19 21:07:34韦民祥郑玲杨威
重庆大学学报 2024年5期
韦民祥 郑玲 杨威
doi: 10.11835/j.issn.1000-582X.2022.113
收稿日期:2022-01-11
网络出版日期:2022-05-07
基金项目:国家自然科学基金资助项目(51875061)。
Foundation:Supported by National Natural Science Foundation of China (51875061).
作者简介:韦民祥(1997—),男,硕士研究生,主要从事汽车主动安全技术研究,(E-mail)20162248@cqu.edu.cn。
通信作者:郑玲,女,教授,博士生导师,(E-mail)zling@cqu.edu.cn。
摘要:针对自动紧急制动(autonomous emergency braking,AEB)系统弯道适应性差及舒适性不佳的问题,提出了一种基于高斯过程运动预测,考虑变曲率弯道和制动舒适性的AEB系统控制策略。基于三次样条曲线建立行车道路模型,对前车进行定位,并计算相对曲线距离。考虑车辆运动的非线性特性以及时间效应,建立基于高斯过程理论的车辆运动预测模型,设计了基于预测碰撞时间的分级预警与制动控制策略。联合仿真结果表明:提出的控制策略能够有效实现车辆的避撞,解决了AEB系统在复杂动态工况下的弯道适应性和制动舒适性问题。
关键词:驾驶辅助系统;自动紧急制动;高斯过程;碰撞时间
中图分类号:U461.91 文献标志码:A 文章编号:1000-582X(2024)05-047-10
AEB system control strategy considering vehicle motion prediction
WEI Minxiang, ZHENG Ling, YANG Wei
(State Key Laboratory of Mechanical Transmissions, Chongqing University, Chongqing 400044, P. R. China)
Abstract: To address the issues of poor corner adaptability and discomfort in the autonomous emergency braking (AEB) system during cornering, a control strategy for the AEB system is proposed. This strategy is based on Gaussian process motion prediction, with variable curvature corners and braking comfort taken into account. A road model is established by using cubic spline curves to locate the obstacle and calculate the relative distance. Taking into account the nonlinear characteristics of vehicle motion and the effect of time, a vehicle motion prediction model based on Gaussian process theory is developed. A hierarchical early warning and braking control strategy based on predicted collision time is designed. The results of the co-simulation show that the proposed control strategy can effectively achieve collision avoidance, solving the AEB systems curve adaptability and braking comfort problems under complex dynamic conditions.
Keywords: driving assistance system; autonomous emergency brake; Gaussian process; time to collision
AEB作为典型的驾驶辅助系统[1],能够有效减少由于驾驶员操作不当而导致的车辆追尾事故[2],将成为智能化汽车不可或缺的先进驾驶辅助系统。它通过车载传感器监测周围环境和车辆状态,实时评估碰撞风险,给驾驶员提供预警、辅助制动或紧急制动等,以达到防止碰撞发生或减轻碰撞危害的目的。AEB系统的控制策略直接影响其功能实现和驾驶舒适性,是AEB系统开发的关键环节[3]。为此,中外学者开展了广泛的研究。基于碰撞时间(time to collision,TTC)的控制策略从时间尺度衡量碰撞风险,更能体现人类驾驶员对碰撞风险的观感与判断[4],在安全性和舒适性上表现出优秀的综合性能[5]。Hirst等[6]指出自车速度和与前车的相对车速是影响AEB系统干扰驾驶员操作的主要因素,提出了基于速度补偿的TTC控制策略。针对两车速度相等时,相对距离除以相对速度得到的TTC值接近无穷大的问题,徐杰等[7]提出了改进的二阶TTC计算方法。裴晓飞等[8]建立了以碰撞时间的倒数为评价指标的安全模型,从而根据危险系数判断危险等级,作出避撞决策。兰凤崇等[9]基于分层控制思想,建立了上层预碰撞时间模型、下层比例-积分-微分(proportion-integral-differential,PID)反馈调节的AEB系统控制策略,仿真结果表明车速在65 km/h以内可以有效避免碰撞。郭祥靖等[10]针对半挂汽车制动距离长、质量大、质心高等特点,提出了一种基于BP(back propagation)神经网络预测碰撞时间的AEB系统控制策略。杨为等[11]基于碰撞时间风险评估模型,设计了一种针对行人紧急避撞的分层控制策略。AEB作为高级驾驶辅助系统,在保证功能实现的基础上研究如何提升驾驶舒适性具有重要意义。黄城[12]指出现有AEB控制方法在多场景通用下的舒适性方面仍存在改进空间。Kyongsu等[13]结合制动器特性设计了非线性制动减速度曲线,从而提高车辆紧急制动时的舒适性。Bae等[14]设计了基于碰撞时间的分级制动控制策略,并在部分制动时设计制动恢复区和释放区,从而改善乘坐舒适性。
综上可知,传统碰撞时间计算方法未能准确描述车辆的非线性运动特性,导致计算得出的碰撞时间并不准确,且大多针对直道工况,或假设道路为定曲率圆弧[15],对复杂的几何道路考虑不足,对紧急制动过程的舒适性关注不够。
针对AEB系统控制策略开发中碰撞时间计算不准确、弯道适应性差和制动舒适性不佳的问题,笔者采用样条曲线构造道路模型对前方目标进行定位,以曲线弧长作为自车与目标的真实相对距离,考虑车辆运动的非线性特性和时间效应,建立基于高斯过程理论的车辆运动预测模型来计算碰撞时间,考虑紧急制动过程的舒适性,设计基于预测碰撞时间分级预警与制动的控制策略,并以下层PID反馈控制器实现对减速度的跟踪控制,为克服现有AEB系统存在的不足提供新的解决思路。
1 目标定位与相对距离计算
针对现有AEB系统弯道适应性差的问题,用三次样条曲线建立当前自车行驶车道的道路中心线模型,根据感知层获取的前方目标信息,对目标车辆进行定位,以曲线弧长作为自车与目标的真实相对距离,从而降低距离计算的误差,提高AEB系统在复杂道路环境下的适应性。
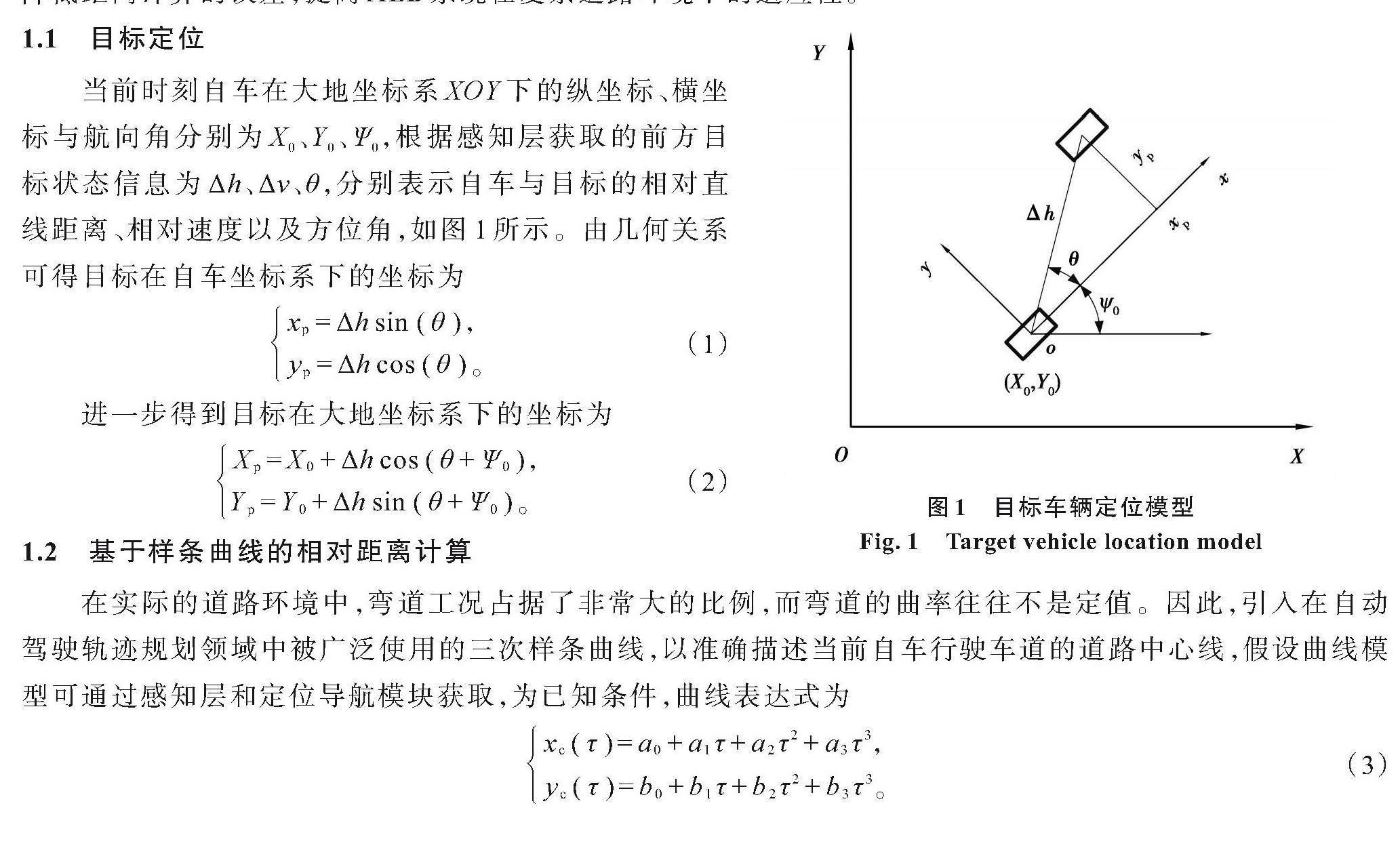
1.1 目标定位
当前时刻自车在大地坐标系XOY下的纵坐标、横坐标与航向角分别为X0、Y0、Ψ0,根据感知层获取的前方目标状态信息为Δh、Δv、θ,分别表示自车与目标的相对直线距离、相对速度以及方位角,如图1所示。由几何关系可得目标在自车坐标系下的坐标为
(1)
进一步得到目标在大地坐标系下的坐标为
(2)
1.2 基于样条曲线的相对距离计算
在实际的道路环境中,弯道工况占据了非常大的比例,而弯道的曲率往往不是定值。因此,引入在自动驾驶轨迹规划领域中被广泛使用的三次样条曲线,以准确描述当前自车行驶车道的道路中心线,假设曲线模型可通过感知层和定位导航模块获取,为已知条件,曲线表达式为
(3)
式中:xc、yc分别表示曲线上任意一点的横、纵坐标;τ为曲线参数;a0、a1、a2、a3和b0、b1、b2、b3分别为曲线的各项系数。
图2 车道中心线与路面点之间的关系
Fig. 2 Relationship between the centerline of the lane and the pavement point
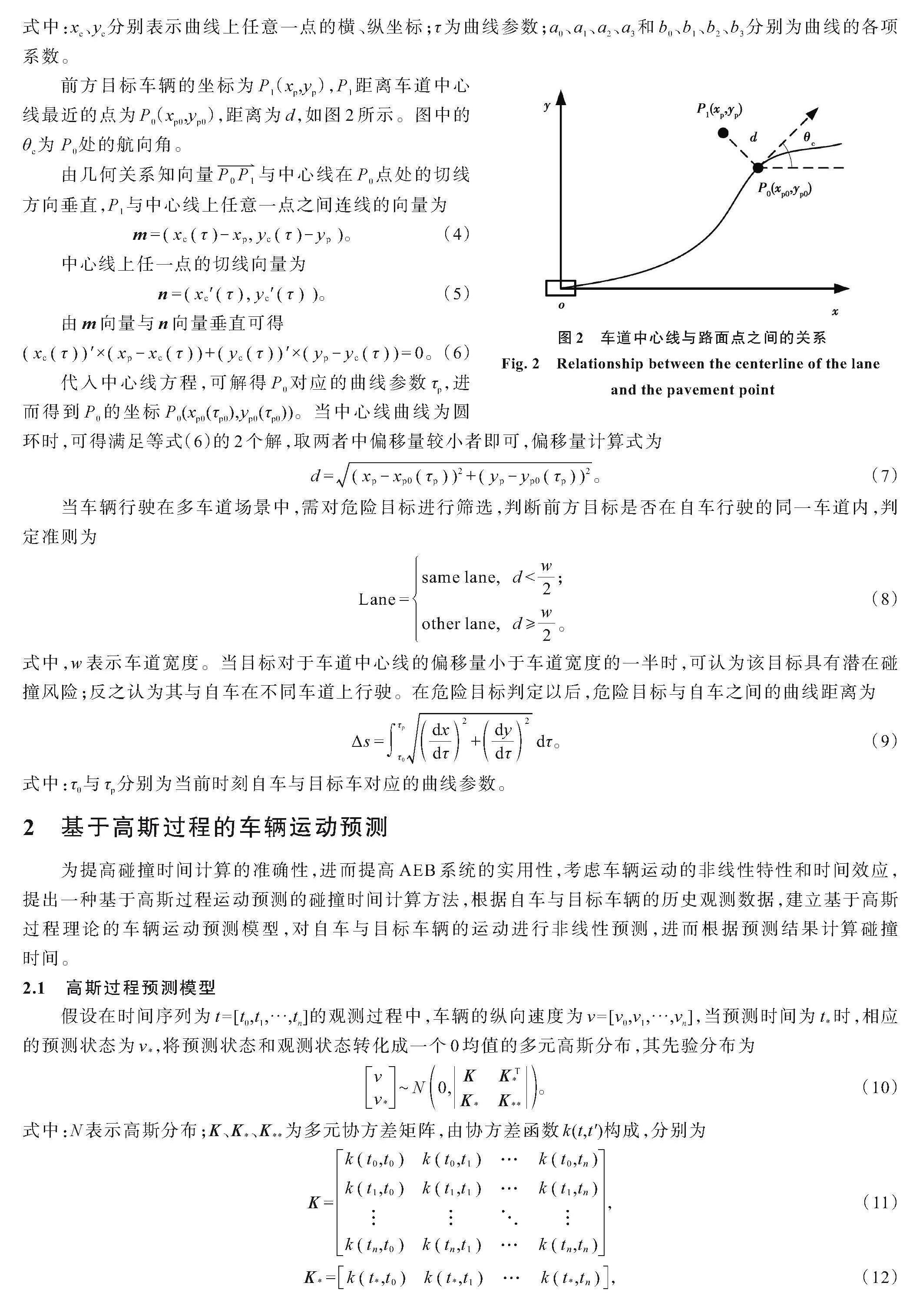
前方目标车辆的坐标为P1(xp,yp),P1距离车道中心线最近的点为P0(xp0,yp0),距离为d,如图2所示。图中的θc为 P0处的航向角。
由几何关系知向量与中心线在P0点处的切线方向垂直,P1与中心线上任意一点之间连线的向量为
。 (4)
中心线上任一点的切线向量为
。 (5)
由m向量与n向量垂直可得
。 (6)
代入中心线方程,可解得P0对应的曲线参数τp,进而得到P0的坐标P0(xp0(τp0),yp0(τp0))。当中心线曲线为圆环时,可得满足等式(6)的2个解,取两者中偏移量较小者即可,偏移量计算式为
。 (7)
当车辆行驶在多车道场景中,需对危险目标进行筛选,判断前方目标是否在自车行驶的同一车道内,判定准则为
(8)
式中,w表示车道宽度。当目标对于车道中心线的偏移量小于车道宽度的一半时,可认为该目标具有潜在碰撞风险;反之认为其与自车在不同车道上行驶。在危险目标判定以后,危险目标与自车之间的曲线距离为
。 (9)
式中:τ0与τp分别为当前时刻自车与目标车对应的曲线参数。
2 基于高斯过程的车辆运动预测
为提高碰撞时间计算的准确性,进而提高AEB系统的实用性,考虑车辆运动的非线性特性和时间效应,提出一种基于高斯过程运动预测的碰撞时间计算方法,根据自车与目标车辆的历史观测数据,建立基于高斯过程理论的车辆运动预测模型,对自车与目标车辆的运动进行非线性预测,进而根据预测结果计算碰撞时间。
2.1 高斯过程预测模型
假设在时间序列为t=[t0,t1,···,tn]的观测过程中,车辆的纵向速度为v=[v0,v1,···,vn],当预测时间为时,相应的预测状态为,将预测状态和观测状态转化成一个0均值的多元高斯分布,其先验分布为
。 (10)
式中:N表示高斯分布;K、、为多元协方差矩阵,由协方差函数k(t,t′)构成,分别为
, (11)
, (12)
。 (13)
式中,协方差函数k(t,t′)为径向基核函数,其表达式为
。 (14)
式中:参数σ和l通过组合参数ζ求解,ζ=[σ, l]是可通过极大似然估计求得的模型超参数,可表示为
。 (15)
式中,n为样本量。
基于观测状态,可由条件分布推知车辆纵向速度预测状态的分布:
。 (16)
2.2 基于运动预测的TTC计算
基于高斯过程理论,根据一定的历史观测数据,对未来一段时间内车辆的纵向运动进行预测,可得到预测时域内预测状态的分布,即车辆未来纵向速度的均值与置信区间,预测结果如图3所示。
图3 基于高斯过程理论的车辆运动预测结果
Fig. 3 Vehicle motion prediction results based on Gaussian Process theory
图3分别为加速和减速2种典型车辆运行状态下的运动预测结果,采样频率为20 Hz,基于5 s的历史数据对未来3 s的车速进行预测。从图3可知,预测误差与预测时间呈正相关,预测时间越长误差越大,但在有限的预测时间内,预测结果的误差在1.5 m/s以内,基于高斯过程理论对车辆车速的预测结果能够真实地反应车辆在未来一段时间内的非线性运动状态。
假设当前时刻为t=0,自车速度为v0,前方目标车辆的速度为vp0,由历史观测数据,通过高斯过程运动预测模型分别得到自车和目标车辆的速度曲线:
, (17)
。 (18)
自车和目标车辆在未来时刻的行驶路程分别为
, (19)
。 (20)
当前时刻下自车与前车的相对距离为Δs,则碰撞时间可通过求解式(21)获得。
。 (21)
3 考虑弯道及运动预测的AEB系统控制策略
AEB作为先进驾驶辅助系统,仅对车辆的纵向运动进行控制,而不干预车辆转向,车辆的主控权仍在于人类驾驶员。在弯道工况中,转向控制仍然由驾驶员完成,因此在控制策略中将弯道行驶工况简化为车辆纵向运动,AEB系统仅干预车辆的纵向运动。
兼顾宜人性与安全性,提出一种基于碰撞时间的分级预警与制动控制策略:当碰撞时间达到预警时间阈值TTC1st时,AEB系统被激活,进入Ⅰ级风险状态,填充制动系统管路的油压,降低制动时延,同时对驾驶员发出碰撞警示;当达到阈值TTC2nd时,进入Ⅱ级风险状态,以期望减速度a2nd进行强制制动;当达到阈值TTC3rd时,进入Ⅲ级状态,以期望减速度a3rd进行全力制动,控制逻辑如图4所示。同时,为了减轻紧急制动过程中车辆状态急剧变化给驾驶员产生的不适感,在紧急制动开始阶段设置缓冲带,用三次多项式设计减速度曲线,缓和减速度的阶跃变化,从而提高乘坐舒适性。
3.1 碰撞时间阈值及切换逻辑
基于碰撞时间的AEB控制策略与基于距离的控制策略相比,更符合驾驶员对危险行车状态的认知和判断,宜人性能更佳,但碰撞时间阈值的选取非常关键。若阈值选择过大,则容易干扰驾驶员的正常驾驶,造成驾驶员的反感和不信任;若阈值选取较小,则安全性得不到可靠的保证。
《营运车辆自动紧急制动系统性能要求和测试规程》JT/T1242—2019[16]中规定,AEB系统紧急制动阶段不应在TTC≥3 s前开始,且高斯过程车辆运动预测模型对车速的预测误差随预测时间增大而增大,但在3 s内预测误差小于1.5 m/s。因此,选取Ⅰ级风险状态下的碰撞时间阈值为TTC1st=3 s;综合考虑舒适性和安全性,选取Ⅱ级、Ⅲ级风险状态的阈值分别为TTC2nd=1.9 s,TTC3rd=0.9 s[9]。风险等级flag的判定逻辑如式(22)所示。
(22)
为防止车辆在制动过程中风险等级频繁切换而造成车辆运动的抖动,对切换过程的临界状态进行约束。当风险等级为1时,若驾驶员进行制动则解除预警;当风险等级为2或3时,若驾驶员无制动操作或制动强度没有达到期望值时,则进行辅助制动,直至自车速度小于或等于前车速度,退出当前风险状态。
3.2 制动减速度控制
在车辆制动的过程中,减速度及其变化率的大小是影响乘坐舒适性的主要因素[11]。统计结果表明,紧急制动时驾驶人员行车减速度的平均值为0.38g,最大减速度为0.72g[15]。综合考虑驾驶舒适性和安全性,选取部分制动时的减速度a2nd=-4 m/s2,全力制动时的减速度a3rd=-7 m/s2。
紧急制动时,由于减速度及其变化率jerk的急剧变化,会引起驾驶员的极度不适。Kyongsu等[13]指出,减速度的变化率满足约束式(23),可有效保证紧急制动时的舒适性。
。 (23)
为此,引入自动驾驶轨迹规划中广泛使用的多项式曲线,设计制动减速度曲线来缓和减速度的阶跃变化,从而保证制动过程的舒适性。使用三次多项式曲线来设计减速度的缓和曲线,其表达式为
。 (24)
式中:a为减速度;A、B、C、D分别为多项式曲线的各项系数。
则减速度变化率为
。 (25)
初始时刻约束条件为
, (26)
。 (27)
式中:a0和jerk0分别为开始减速时间t0的减速度和减速度变化率。
缓和曲线末端约束条件为
, (28)
。 (29)
式中:aend和jerkend分别为终止减速时间tend的减速度和减速度变化率。
联立式(26)~式(29),求解得期望减速度曲线如图5所示。
jerk的幅值与始、末端减速度差值Δa以及缓冲带时间Δt相关,Δt的选取应满足约束条件式(23)。在部分制动工况中,Δa=4 m/s2,取Δt=0.6 s;从部分制动转换到全力制动的过程中,Δa=3 m/s2,则取Δt=0.45 s,计算结果如图6所示。
图6 减速度曲线计算结果
Fig. 6 Calculation results of deceleration curve
为实现对制动减速度的跟踪控制,基于PID控制理论设计以期望减速度ades与实际减速度aact的偏差e(t)为输入、制动压力为输出的下层控制器,控制律为
。 (30)
式中:u(t)为控制器的输出量,即制动压力;KP、KI、KD分别为PID控制器的比例系数、积分系数和微分系数,可通过试凑法进行整定[17]。
4 仿真分析
为验证提出的控制策略的有效性,在PreScan和Matlab/Simulink联合仿真平台中搭建典型测试场景,在4种工况下对提出的控制策略进行仿真测试:前车静止(car-to-car rear stationary,CCRs)工况、前车匀速行驶(car-to-car rear moving,CCRm)工况、前车减速行驶(car-to-car rear braking,CCRb)工况和弯道工况。
4.1 CCRs工况
设置自车初始速度为50 km/h,前车初始速度为0 km/h,减速度为0 m/s2,初始相对距离为100 m,仿真结果如图7所示。
由图7可知,自车以50 km/h的初始速度,由PreScan中的驾驶员模型驾驶自车稳速接近静止的前车。4.34 s时系统判断出碰撞风险,发出碰撞预警;在5.44 s时进入Ⅱ级风险状态,开始进行部分制动;随后在6.67 s时进入全力制动状态,直至8.28 s时车辆停车,最终停车间距为2.51 m。在5.44 s以前,由PreScan中的驾驶员模型对自车进行操控,速度和减速度均存在一定的误差,AEB系统介入后,车辆的减速度能够准确跟随期望值,实现了紧急避撞,在保证安全性的前提下有效地提高了紧急制动时的乘坐舒适性。
4.2 CCRm工况
设置自车初始速度为50 km/h,前车初始速度为20 km/h,减速度为0 m/s2,初始相对距离为100 m,仿真结果如图8所示。
从图8可知,该工况下,9.08 s时进入预警状态,10.18 s时开始进行强制制动,由于碰撞风险并未达到Ⅲ级,在12.50 s时两车的相对速度为0,AEB系统退出控制,由驾驶员接管控制,此时两车的最小距离为7.30 m,保证了行车安全。
4.3 CCRb工况
设置自车和前车的初始速度均为50 km/h,5.00 s时前车以-4 m/s2的减速度减速至停车,初始相对距离为30 m,仿真结果如图9所示。
从图9中可以看出,前车在5.00 s时开始减速,6.89 s时系统发出碰撞预警;7.39 s时AEB系统介入并进行部分制动,随即在8.19 s时风险等级达到Ⅲ级,进行全力制动,最终停车间距为1.85 m,在安全距离范围内。整个强制制动的过程持续2.63 s,车辆速度由50 km/h减速至0,控制策略能够有效地实现动态紧急避撞。
4.4 弯道工况
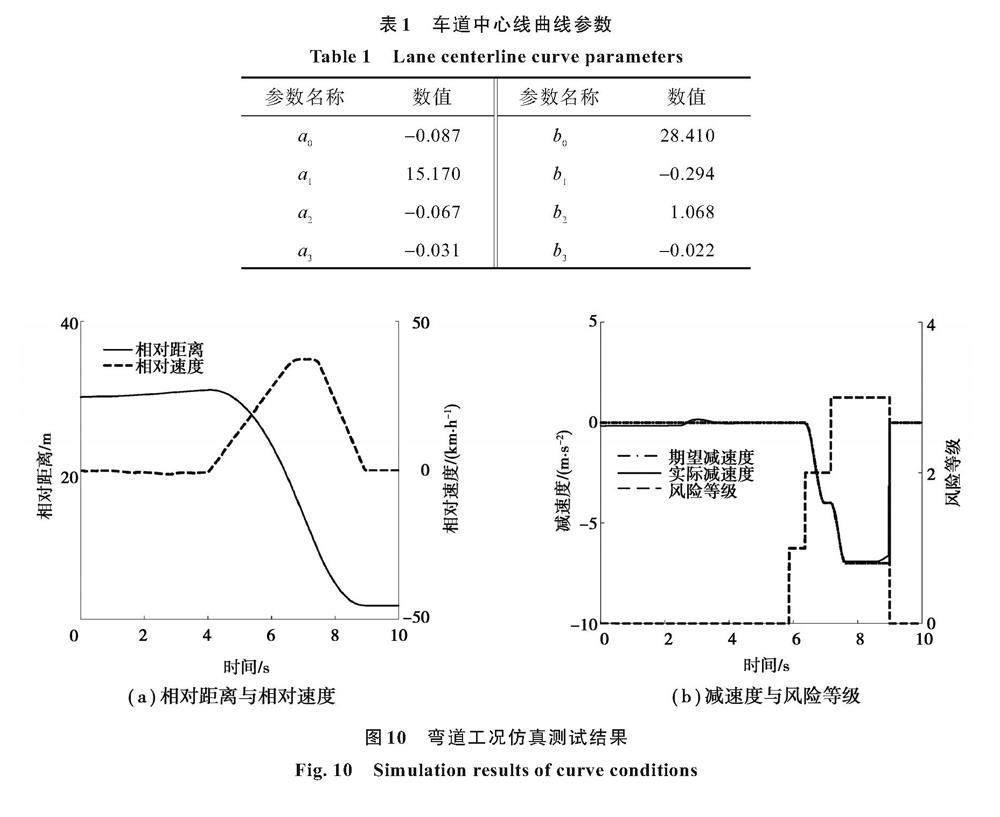
设置自车初始速度为50 km/h,前车初始速度为20 km/h,当时间为4.00 s时,前车以-4m/s2的减速度减速至停车,初始相对距离为30 m,车道中心线方程为式(3),曲线各参数如表1所示,仿真结果如图10所示。
从图10可知,前车在4.00 s时开始减速,5.18 s时系统发出碰撞预警,随着前车继续减速,两车相对距离持续减小,在6.37 s时进入Ⅱ级风险状态,开始进行部分制动,随后全力制动至停车,整个制动过程持续2.62 s,停车间距为1.85 m。所设计的AEB系统控制策略能够适应复杂的动态工况,在变曲率的曲线道路下,仍能够兼顾舒适性实现紧急避撞功能。
5 结 论
针对AEB系统弯道适应性差及舒适性不佳的问题,建立了三次样条曲线道路模型以及基于高斯过程理论的车辆运动预测模型,设计了基于预测碰撞时间的分级预警与制动控制策略。研究结果表明:
1)基于三次样条曲线的道路模型,考虑了实际道路的几何复杂性,真实反应了变曲率弯道道路的几何特性,能够准确计算出自车与前方目标车辆的相对曲线距离。
2)基于高斯过程理论的车辆运动预测模型考虑了车辆运动的非线性特性和时间效应,在3 s内对车速的预测误差小于1.5 m/s,且能准确计算出碰撞时间。
3)联合仿真验证表明,所提出的AEB控制策略在CCRs、CCRm、CCRb典型工况中均能兼顾制动舒适性实现紧急避撞,且在变曲率的弯道减速工况中,仍表现出可靠的避撞功能,提高了AEB系统的弯道适应性和舒适性,有助于推进AEB系统关键技术的发展与工程化应用。
参考文献
[1] 任玥. 智能电动汽车主动循迹与避撞控制研究[D]. 重庆: 重庆大学, 2018.
Ren Y. Research on active path tracking and collision avoidance for autonomous electric vehicle[D]. Chongqing: Chongqing University, 2018.(in Chinese)
[2] National Highway Traffic Safety Administration. Automatic emergency braking (AEB) system research report: 01551243 [R]. Washington, DC: National Highway Traffic Safety Administration, 2014.
[3] 何仁, 冯海鹏. 自动紧急制动(AEB)技术的研究与进展[J]. 汽车安全与节能学报, 2019, 10(1): 1-15.
He R, Feng H P. Research and development of autonomous emergency brake (AEB) technology[J]. Journal of Automotive Safety and Energy, 2019, 10(1): 1-15.(in Chinese)
[4] Lee D N. A theory of visual control of braking based on information about time-to-collision[J]. Perception, 1976, 5(4): 437-459.
[5] 胡远志, 吕章洁, 刘西. 基于PreScan的AEB系统纵向避撞算法及仿真验证[J]. 汽车安全与节能学报, 2017, 8(2): 136-142.
Hu Y Z, Lv Z J, Liu X. Algorithm and simulation verification of longitudinal collision avoidance for autonomous emergency break (AEB) system based on PreScan[J]. Journal of Automotive Safety and Energy, 2017, 8(2): 136-142. (in Chinese)
[6] Hirst S, Graham R. The format and presentation of collision warnings[M]//Ergonomics and safety of intelligent driver interfaces. Boca Raton, Florida: CRC Press, 1997: 203-219.
[7] 徐杰, 李博, 霍克, 等. 基于Euro-NCAP的自动紧急制动系统算法开发[C] // 2014第十七届汽车安全技术学术会议. 北京: 中国汽车工程学会, 2014: 142-148.
Xu J, Li B, Huo K, et al. Development of autonomous emergency braking systems algorithm based on Euro-NCAP[C] // The 17th Automotive Safety Technology Conference 2014. Beijing: China Society of Automotive Engineers, 2014: 142-148. (in Chinese)
[8] 裴晓飞, 刘昭度, 马国成, 等. 汽车主动避撞系统的安全距离模型和目标检测算法[J]. 汽车安全与节能学报, 2012, 3(1): 26-33.
Pei X F, Liu Z D, Ma G C, et al. Safe distance model and obstacle detection algorithms for a collision warning and collision avoidance system[J]. Journal of Automotive Safety and Energy, 2012, 3(1): 26-33. (in Chinese)
[9] 兰凤崇, 余蒙, 李诗成, 等. 考虑预碰撞时间的自动紧急制动系统分层控制策略研究[J]. 汽车工程, 2020, 42(2): 206-214.
Lan F C, Yu M, Li S C, et al. Research on hierarchical control strategy for automatic emergency braking system with consideration of time-to-collision[J]. Automotive Engineering, 2020, 42(2): 206-214. (in Chinese)
[10] 郭祥靖, 孙攀, 邓杰, 等. 基于BP神经网络算法预测的重型半挂汽车列车AEB控制策略研究[J]. 汽车工程, 2021, 43(9): 1350-1359, 1366.
Guo X J, Sun P, Deng J, et al. Research on AEB control strategy of a heavy tractor-semitrailer combination based on BP neural network algorithm prediction[J]. Automotive Engineering, 2021, 43(9): 1350-1359, 1366. (in Chinese)
[11] 杨为, 赵胡屹, 舒红. 自动紧急制动系统行人避撞策略及仿真验证[J]. 重庆大学学报, 2019, 42(2): 1-10.
Yang W. Zhao H Y, Shu H. Simulation and verification of the control strategies for AEB pedestrian collision avoidance system[J]. Journal of Chongqing University, 2019, 42(2): 1-10. (in Chinese)
[12] 黄城. 考虑舒适性的AEB控制策略研究[D]. 重庆: 西南大学, 2021.
Huang C. Research on AEB control strategy considering comfort[D]. Chongqing: Southwest University, 2021. (in Chinese)
[13] Kyongsu Y, Jintai C. Nonlinear brake control for vehicle CW/CA systems[J]. IEEE/ASME Transactions on Mechatronics, 2002, 6(1): 17-25.
[14] Bae J J, Lee M S, Kang N. Partial and full braking algorithm according to time-to-collision for both safety and ride comfort in an autonomous vehicle[J]. International Journal of Automotive Technology, 2020, 21(2): 351-360.
[15] Mun H, Kim G, Kim B. AEB system for a curved road considering V2V based road surface conditions[J]. Advanced Science and Technology Letters, 2015, 86: 8-13.
[16] 周炜, 曲保章, 李文亮, 等. 营运车辆自动紧急制动系统性能要求和测试规程: JT/T1242—2019[S]. 北京: 中华人民共和国交通部, 2019.
Zhou W, Qu B Z, Li W L, et al. Performance requirements and test procedures for advanced emergency braking system for operating vehicles: JT/T1242—2019[S]. Beijing: Ministry of Transport of the Peoples Republic of China, 2019. (in Chinese).
[17] 李以农, 郑玲. 汽车控制理论与应用[M]. 北京: 清华大学出版社, 2021.
Li Y N, Zheng L. Automobile control theory and application[M]. Beijing: Tsinghua University Press, 2021. (in Chinese)
(编辑 罗敏)