贝类采捕机振动去泥装置设计与试验
2024-06-17 17:47:46李陈方军罗巍吴康李建平
中国农机化学报 2024年6期
李陈 方军 罗巍 吴康 李建平

摘要:为解决泥质滩涂贝类采捕过程中,去除淤泥,实现贝泥分离,设计一种基于机械振动的贝类去泥装置。对去泥过程的贝类进行受力分析,测量贝类的物理尺寸,明晰影响去泥性能的主要因素,通过预试验确定各因素的试验取值范围。以条形筛倾角、振动电机转速和偏心块数量为试验因素,明贝率和完成时间为评价指标,以泥蛤为研究对象开展正交试验,分析各因素对去泥性能的影响,获得合理的参数组合,并进行验证试验。结果表明,当条形筛倾角为12°,振动电机转速为2 100 r/min和偏心块数量为16块时,去泥效果和效率较优,明贝率为74%,完成时间为28 s。
关键词:贝类采捕;振动去泥装置;正交试验;参数优化;条形筛
中图分类号:S973.9
文献标识码:A
文章编号:2095-5553 (2024) 06-0072-06
收稿日期:2022年7月13日
修回日期:2022年9月15日
*基金项目:浙江省农业重大技术协同推广项目(2020XTTGSC05)
第一作者:李陈,男,1991年生,浙江绍兴人,博士研究生;研究方向为生物生产机器人。E-mail: lichen2020@zju.edu.cn
通讯作者:李建平,男,1962年生,杭州人,博士,教授;研究方向为农业机械装备。E-mail: jpli@zju.edu.cn
Design and experiment of the vibratory cleaning device for shellfish harvesting machine
Li Chen1, 2, 3, Fang Jun4, Luo Wei1, 3, Wu Kang1, 2, Li Jianping1, 2, 3
(1. College of Biosystems Engineering and Food Science, Zhejiang University, Hangzhou, 310058, China; 2. Key
Laboratory of Equipment and Informatization in Environment Controlled Agriculture, Ministry of Agriculture and Rural
Affairs, Zhejiang University, Hangzhou, 310058, China; 3. Key Laboratory of Intelligent Equipment and Robotics for
Agriculture of Zhejiang Province, Hangzhou, 310058, China; 4. Zhejiang Mariculture Research Institute, Wenzhou, 325000, China)
Abstract: In order to remove mud and realize the separation of shellfish and mud in the process of collecting and catching shellfish in muddy beach, a shellfish cleaning device based on mechanical vibration was designed. In this paper, the forces on shellfish during the cleaning process were analyzed and the physical dimensions of shellfish were measured, the main factors affecting the cleaning performance were clarified and the test value range of each factor were determined through pre-tests. The inclination angle of the screen, the rotational speed of the vibration motor and the number of eccentric blocks were taken as the test factors, the shell ratio and the completion time as the evaluation indexes, the orthogonal test was carried out with the mud clam as the research object, and the influence of each factor on the cleaning performance was analyzed, a reasonable combinations of parameters was obtained and the validation tests was performed. The results showed that when the inclination angle of bar screen was 12°, the rotational speed of vibration motor was 2 100 r/min and the number of eccentric blocks was 16, the cleaning effect and efficiency were better. The shell ratio was 74% and the completion time was 28 s.
Keywords: shellfish harvesting; vibratory de-sludging device; orthogonal test; parameter optimization; bar screen
0 引言
贝类营养丰富,味道鲜美,是餐桌上的一道美味佳肴,广受消费者的喜爱[1, 2]。我国是贝类养殖大国,年产量约为12 000 kt,其中滩涂贝类的产量约占我国贝类养殖总产量的20%[3]。随着生活水平的不断提高,人们对贝类的需求量逐渐增加,因此提高贝类生产的效率迫在眉睫。
贝类采捕是滩涂贝类养殖中重要的生产环节。国内外学者对硬质滩涂的贝类采捕进行了相关研究。为了提高滩涂贝类采收效率,陈正等[4]使用履带自行走的方式设计采捕机,采用振动挖掘机构将贝类采捕后输送到滚筒筛式清洗机完成贝类的清洗和分级。Holt等[5]设计了一种水下振动采蛤装置,利用雪橇使采捕机在海底滑行,采用耙齿将蛤类捕获。申屠留芳等[6]采用机耕船牵引的方式,利用挖掘铲采捕贝类,经链网传送至网兜,在输送过程中用高压水枪清洗贝类,实现采捕和收集。权伟等[7]研制了一种漂浮式的贝类采收装置,在漂浮底座上安装采泥,排泥和贝类收集框,可以在池塘或浅海滩涂作业。
贝类去泥是贝类采捕中的重要环节,目前农业上应用的分离装置主要有链杆式输送器[8],振动分离筛、滚筒筛[9]等。振动筛分装置是贝类采捕机的关键部件之一,其结构和性能直接影响贝类的去泥效果。振动筛分装置中偏心轮振动机构应用最为广泛,在花生收获[10, 11],马铃薯收获[12]、玉米和谷物筛分等农用机械中都有广泛应用[13-15]。
泥质滩涂表层土壤流变性大、抗剪与承压能力差,泥蛤外壳上的淤泥不容易去除,国内有关泥质滩涂贝类机械振动去泥的研究较少。贝类去泥主要是人工采捕,劳动强度大、生产效率低、工作条件差。本文以泥蛤为研究对象,根据贝类的物理特性,设计一种振动去泥装置,对条形筛和泥蛤进行受力分析,研究条形筛倾角、振动电机转速和偏心块数量对去泥性能的影响,获得合理的参数组合,以期解决贝类采捕过程的去泥问题。
1 去泥装置设计
1.1 去泥装置结构
目前,人工去泥是通过耙爪将泥蛤和淤泥采捕进网袋中,在水中来回拖动网袋,将淤泥从泥蛤表面去除。但是泥蛤表面粗糙,淤泥牢牢黏附在其表面,去除较难,需要甩动多次。
参考人工去泥的工作方式,设计了一种振动去泥装置,该装置主要包括振动电机、弹簧片,条形筛,机架等,如图1所示。条形筛通过4根弹簧片安装在机架上,条形筛的上方安装一台振动电机,条形筛可调倾角可调,振动电机选用HY-0.9的偏心振动电机,弹簧片采用65锰钢片。条形筛的质量约为8 kg,主要技术参数如表1所示。弹簧片可以增大条形筛的振幅,振动电机安装在条形筛上方,振动电机带动条形筛振动,从而实现泥蛤的抛掷运动,实现去泥操作。
1.2 工作原理
工作时,采贝机的挖贝装置将贝和淤泥的混合物采挖到去泥装置上,去泥装置的振动动力由振动电机提供,调节振动电机转速可以控制条形筛的振动频率,振动电机的转动带动条形筛振动,条形筛相对于水平面倾角为α,条形筛带动泥蛤做抛掷运动,对泥蛤有较强的分离和输送能力,淤泥从条形筛的间隙中漏出,泥蛤沿着斜面向低处运动,最后到泥蛤收集装置。
1.3 条形筛设计
1) 筛条间距。条形筛是去泥装置的核心部件,筛条间隙的大小影响去泥的效果,使用游标卡尺测量泥蛤的外形参数,如图2所示,作为振动筛分机构研制的基础。
条形筛网格间距适宜,以防漏蛤。泥蛤的外形参数测量结果见表2。泥蛤外形的长、宽、高的平均值分别为31.1 mm、24.3 mm和22.1 mm。其中三个长度的最小值为高度19.3 mm。因此,条形筛两筛杆的间距应小于长宽高的最小值,可考虑预留1.1~1.3倍的余量,故条形筛的间距选用15 mm,筛条选用直径为6 mm的钢条,既有较好的去泥效果,也能防止漏贝,见图3。
2) 条形筛倾角α。通过前期试验测得,泥蛤与条形筛的摩擦角为17.6°,为避免泥蛤自行向下滑动,条形筛倾角应小于摩擦角。通过前期试验发现,条形筛倾角小于8°时,泥蛤在条形筛的移动速度过慢,会导致堵塞。条形筛倾角大于16°时,泥蛤在条形筛的移动速度太快,会导致去泥效果不佳。因此取条形筛的倾角为8°~16°。
1.4 振动电机及参数确定
振动电机为条形筛振动提供动力,主要包括电机、驱动轴和偏心块。电机的额定转速为3 000 r/min。偏心块为半圆片状结构,偏心距e为12.8 mm,偏心块重量为18.45 g,外圆半径R1为31.25 mm,内圆半径R2为3.6 mm,厚度为1.45 mm,可拆卸地安装在驱动轴上,如图4所示。
振动电机产生的激振力
F=nmeω2(1)
式中: n——偏心块数量;
m——偏心块质量;
e——偏心距;
ω——电机的角速度。
可以通过调节偏心块数量和电机转速,来控制激振力。试验中发现,随着电机转速的变化,泥蛤的去泥效果也会变化,当电机转速小于1 800 r/min,泥蛤与筛面的振动较慢,分离时间较长。当电机转速大于2 400 r/min,泥蛤与筛面的振动较快,对分离效果影响不大,过高的转速会导致整机的可靠性降低。故取电机转速为1 800~2 400 r/min。驱动轴一共安装16片偏心块,当偏心块少于8片,条形筛振幅较小,本装置选择8~16片偏心块。
2 振动过程的受力分析
2.1 条形筛受力分析
振动条形筛在振动过程中,其位移可表示为
S=Bsinωt(2)
式中: S——条形筛振动的总位移;
B——条形筛沿振动方向的振幅;
t——转动时间。
将条形筛振动的总位移按照平行条形筛为x轴和垂直条形筛为y轴进行分解,其在x方向和y方向分量如式(3)所示。
Sx=Bsinωtcos(α+β)
Sy=Bsinωtsin(α+β)(3)
式中: α——筛面与水平面的夹角;
β——弹簧片垂线与筛面的夹角。
对式(2)进行一阶导数和二阶导数,即可以得到x方向、y方向的速度和加速度。
vx=Bωcosωtcos(α+β)
vy=Bωcosωtsin(α+β)(4)
ax=-Bω2sinωtsin(α+β)
ay=-Bω2sinωtcos(α+β)(5)
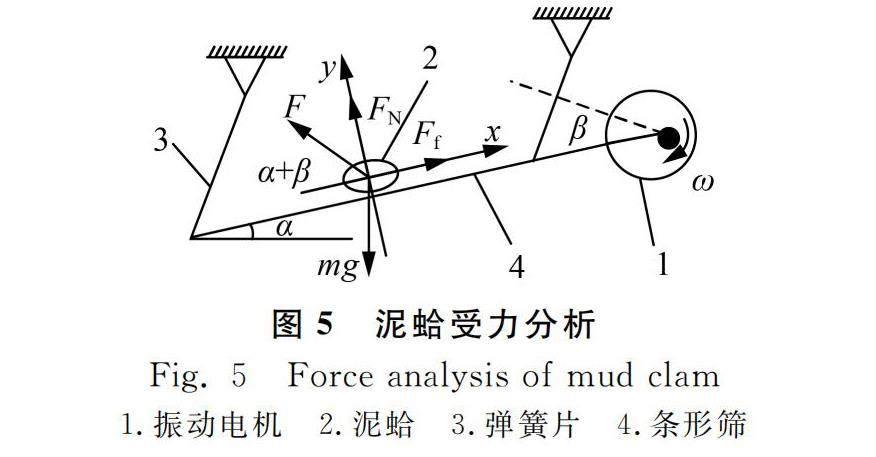
2.2 泥蛤受力分析
泥蛤在条形筛上进行抛掷运动,受力情况见图5。
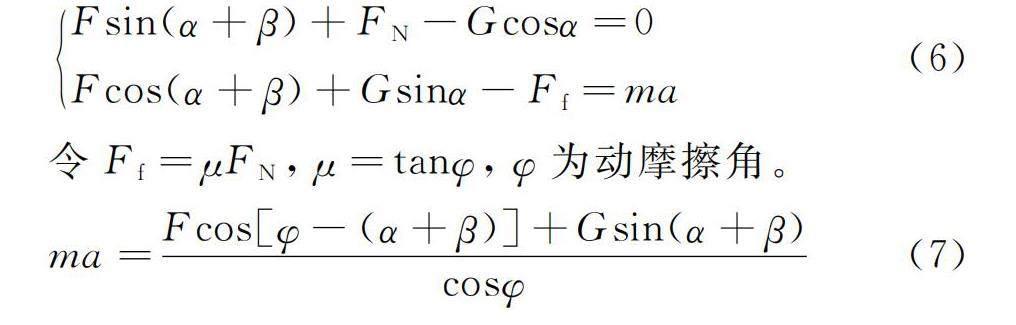
为了简化分析过程,忽略泥蛤之间的相互摩擦和碰撞,取单个泥蛤为研究对象,以其重心为原点,平行于条形筛方向为x轴,垂直于条形筛方向为y轴建立坐标系[16]。由图5分析可知
Fsin(α+β)+FN-Gcosα=0
Fcos(α+β)+Gsinα-Ff=ma(6)
令Ff=μFN,μ=tanφ,φ为动摩擦角。
ma=Fcos[φ-(α+β)]+Gsin(α+β)cosφ(7)
为了确保泥蛤不会自行滑动,一般有α<φ。
若泥蛤从静止状态开始正向滑动,即a>0,则有
cos[φ-(α+β)]>0(8)
F>Gsin(φ-α)cos[φ-(α+β)](9)
振动条形筛的振动强度
K=Bω2g(10)
则振动条形筛的振动强度K大于正向滑移临界振动强度K下滑时,泥蛤开始相对条形筛平面向下滑移。
K>Gsin(φ-α)cos[φ-(α+β)]=K下滑(11)
以上理论分析显示:条形筛的倾角,振动电机的转速和条形筛的振幅,都影响泥蛤的振动过程。
3 试验测试
2022年3月于浙江大学紫金港校区农生环D座进行试验,试验现场如图6所示。
试验材料来自浙江温州乐清湾某滩涂泥蛤养殖场,主要包括泥蛤和淤泥。倾角仪为沪豪H69020104,测振仪为希玛AS63B,数字转速器采用希玛AR925。
试验对象选用浙江省海洋水产养殖研究所培育的清江1号泥蛤,从养殖塘中捕捞50颗泥蛤。
3.1 测量参数确定
通过2.1节分析可知,条形筛的位移和加速度与筛面倾角、振动频率和振动幅度有着密切的关系。
为明确各结构参数对工作条形筛分离效果的影响,以明贝率和完成时间为指标,条形筛倾角、振动电机转速和偏心块数量作为试验因素进行正交试验,探究3个因素的最优组合。根据正交试验的特点选择3因素3水平试验,因素水平表[17]如表3所示。
3.2 测定方法
为满足相同的试验条件,每次投以相同喂入量,称取筛分后泥蛤的重量。随机称取至少30个泥蛤,用电子秤称得其质量为W1,混合入1 000 g的淤泥。将泥蛤和淤泥投放到振动条形筛上,去泥完成后,对分离后的泥蛤进行称重W2。计算明贝率,并记录试验所需时间。明贝率的计算如式(12)所示。
η=W1W2(12)
式中: W1——泥蛤的初始重量;
W2——筛分后泥蛤混合物的重量;
η——明贝率。
每次做完试验,清洗泥蛤,重新将原来的泥蛤类增加1 000 g淤泥,混合均匀,每种条件下重复试验3次,取平均值。
3.3 正交试验
试验结果为明贝率和试验时间,试验设计方案与试验结果如表4所示,其中A、B、C为因素编码值,D组为空白对照组。
因素第i个水平的均值
ki=KiN(13)
式中: Ki——与该因素第i个水平有关的试验结果之和;
N——水平i的试验次数。
极差
R=maxi≠jki-kj(14)
明贝率方差分析结果如表5所示。
完成时间方差分析结果如表6所示。
3.4 试验结果分析
对于指标明贝率因素影响的主次顺序是A、C、B,条形筛倾角A对明贝率影响显著,偏心块数量对明贝率影响较显著,电机转速B振对明贝率影响较小,倾角越小明贝率越高,但是花费时间越长。
对于指标完成时间因素影响的主次顺序是A、C、B,条形筛倾角A对完成时间影响显著,电机转速B和偏心块数量C振对完成时间影响较小,倾角越大完成时间越短,但是明贝率越低。
振动去泥装置作业时的各个因素,因根据实际情况而定,筛分时的振动频率过高或振幅过大,会提高机器的故障率;筛分网倾角过大,会加速泥蛤下落,进而加快筛分时间,但是淤泥和泥蛤的分离不够。应考虑机器的可靠性,在保证收获效率的同时,考虑收获质量。考虑采贝机的前进和挖掘速度,去泥时间不超过30 s。综上所述,较为合理的参数为A2B2C3,即分离网倾角12°,电机转速2 100 r/min,偏心块数量16块。在此参数组合下进行验证试验,经过5次试验,其平均筛分率为74%,平均完成时间为28 s。
4 结论
1) 设计一种振动去泥装置,采用振动电机驱动条形筛;对泥蛤的物理特性进行研究,得到泥蛤长度、宽度、厚度和摩擦力等物理参数,对条形筛进行设计,并对振动电机进行参数确定。
2) 对条形筛和泥蛤的振动过程进行受力分析,得到影响试验的关键因素,通过试验得到各因素对去泥效果的影响,条形筛倾斜角度对明贝率和完成时间有显著影响,偏心块数量效果次之。振动频率和偏心块数量对完成时间有显著影响。
3) 在条形筛倾角为12°,电机转速为2 100 r/min,偏心块数量为16块时,去泥效果较优。在该参数下进行验证试验,结果表明,其筛分率为74%,完成时间为28 s,无明显堵塞现象,优于目前人工收获质量,满足泥蛤收获作业要求。
4) 本文为江浙沿海泥质滩涂贝类振动去泥提供解决办法,促进泥质滩涂贝类从人工采收向机械化转型。
参 考 文 献
[1]李苹苹. 五种经济贝类的营养成分及蛋白质质量分析[J]. 食品研究与开发, 2014, 35(15): 99-101.
Li Pingping. The analysis of nutrient ingredients and protein quality on five economic shillfish [J]. Food Research and Development, 2014, 35(15): 99-101.
[2]赵圣涛, 常青, 刘慧, 等. 物联网在工厂化水产养殖中的应用分析[J]. 渔业现代化, 2019, 46(4): 8-13.
Zhao Shengtao, Chang Qing, Liu Hui, et al. Analysis on application of Internet of Tings in industrial aquaculture [J]. Fishery Modernization, 2019, 46(4): 8-13.
[3]农业农村部渔业渔政管理局, 全国水产技术推广总站, 中国水产学会. 2021中国渔业统计年鉴[M]. 北京: 中国农业出版社, 2021.
[4]陈正, 朱从容, 李振华, 等. 履带式滩涂贝类采收机设计[J]. 机械工程师, 2015(12): 136-137.
Chen Zheng, Zhu Congrong, Li Zhenhua, et al. Design of tracked tidal shellfish harvesting machine [J]. Mechanical Engineer, 2015(12): 136-137.
[5]Holt J K, Creswell R L. Vibratory shellfish harvesters and methods [P]. US Patent: 5027533A, 1991-07-02.
[6]申屠留芳, 巩尊国, 孙星钊, 等. 自走式蛤类收获机的设计[J]. 中国农机化学报, 2015, 36(1): 192-195.
Shentu Liufang, Gong Zunguo, Sun Xingzhao, et al. Design of the self-propelled clam harvester [J]. Journal of Chinese Agricultural Mechanization, 2015, 36(1): 192-195.
[7]权伟, 余少娜, 应苗苗, 等. 贝类采收装置[P]. 中国专利: CN303439784S, 2015-11-11.
[8]李佳隆. 链杆式花生起收机放铺装置设计及试验分析[D]. 沈阳: 沈阳农业大学, 2018.
Li Jialong. Design and experimental analysis of chain bar type peanut harvester laying device [D]. Shenyang: Shenyang Agricultural University, 2018.
[9]王冠, 霍丽丽, 赵立欣, 等. 秸秆类生物质原料筛分除杂试验及滚筒筛改进[J]. 农业工程学报, 2016, 32(13):218-222.
Wang Guan, Huo Lili, Zhao Lixin, et al. Screening of biomass straw materials and improvement of feedstock equipment [J]. Transactions of the Chinese Society of Agricultural Engineering, 2016, 32(13): 218-222.
[10]高连兴, 李献奇, 关萌, 等. 双吸风口振动式花生荚果清选装置设计与试验[J]. 农业机械学报, 2015, 46(3): 110-117.
Gao Lianxing, Li Xianqi, Guan Meng, et al. Design and test on cleaning device of peanut pods with double air suction inlets with vibration screen [J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(3): 110-117.
[11]鲍起静. 干花生清选特性与筛选装置运动参数分析及仿真研究[D]. 沈阳: 沈阳农业大学, 2018.
Bao Qijing. Kinematic analysis and simulation of dry peanut cleaning characteristics and screening device [D]. Shenyang: Shenyang Agricultural University, 2018.
[12]张兆国, 王海翼, 李彦彬, 等. 多级分离缓冲马铃薯收获机设计与试验[J]. 农业机械学报, 2021, 52(2): 96-109.
Zhang Zhaoguo, Wang Haiyi, Li Yanbin, et al. Design and experiment of multi-stage separation buffer potato harvester [J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(2): 96-109.
[13]王立军, 李瑞, 于泳涛, 等. 玉米籽粒收获机双层不平行振动筛设计与试验[J]. 农业机械学报, 2019, 50(7): 130-139.
Wang Lijun, Li Rui, Yu Yongtao, et al. Design and test of double-layer non-parallel vibrating screens [J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(7): 130-139.
[14]李义博. 玉米收获机清选装置内杂余抛送器设计与试验[D]. 哈尔滨: 东北农业大学, 2019.
Li Yibo. Design and experiment of mechanism of throwing impurity in cleaning device of maize grain harvester [D]. Harbin: Northeast Agricultural University, 2019.
[15]李菊, 王增彪, 沈惠平, 等. 凸柱筛面并联振动筛的谷物筛分试验与分析[J]. 机械设计与研究, 2016, 32(1): 150-154, 158.
Li Ju, Wang Zengbiao, Shen Huiping, et al. Experiment and analysis of parallel vibrating sieve with convex column screen surface on grain screening [J]. Machine Design & Research, 2016, 32(1): 150-154, 158.
[16]闻邦椿, 刘凤翘. 振动机械的理论及应用[M]. 北京: 机械工业出版社, 1982.
[17]王万中. 试验的设计与分析[M]. 北京: 高等教育出版社, 2004.
猜你喜欢
筑路机械与施工机械化(2016年11期)2017-02-05 20:54:02
科教导刊·电子版(2016年30期)2016-12-26 16:43:00
山东农业科学(2016年11期)2016-12-17 22:14:38
安徽理工大学学报·自然科学版(2016年1期)2016-12-14 22:19:41
湖北农业科学(2016年18期)2016-12-08 18:51:32
中国民族民间医药·上半月(2016年10期)2016-11-19 11:34:28
电脑知识与技术(2016年24期)2016-11-14 02:03:09
科技视界(2016年23期)2016-11-04 08:17:36
科技视界(2016年18期)2016-11-03 21:44:44
科技视界(2016年20期)2016-09-29 11:36:29