燃料电池汽车动力系统匹配及能量管理
2024-05-31 12:46:50肖哲王宇宁赵国强黄斌
江苏大学学报(自然科学版) 2024年3期
关键词:模糊控制
肖哲 王宇宁 赵国强 黄斌
DOI: 10.3969/j.issn.1671-7775.2024.03.004
开放科学(资源服务)标识码(OSID):
摘要:
为了分析燃料电池汽车动力系统参数匹配设计以及能量管理方案对整车性能的影响,以某款燃料电池汽车为研究对象,对其主要动力系统部件进行了参数匹配.以提升整车经济性能为目标,提出了功率跟随式能量管理策略和基于模糊控制的能量管理策略,并采用滑动平均滤波算法对模糊控制策略输出量进行优化.基于AVL-Cruise和Simulink建立了联合仿真平台,搭建整车及能量管理系统模型,验证了整车动力性能,对比分析了3种控制策略下的整车经济性能.结果表明:经过优化后的能量管理策略燃料电池输出功率曲线更加平滑,且一直处于高效率输出区间内,基于燃料电池优先保护原则,经过优化后的能量管理策略性能最佳.
关键词: 燃料电池汽车; 动力匹配; 能量管理; 功率跟随; 模糊控制
中图分类号: U469.72 文献标志码: A 文章编号: 1671-7775(2024)03-0273-08
引文格式: 肖 哲,王宇宁,赵国强,等. 燃料电池汽车动力系统匹配及能量管理[J].江苏大学学报(自然科学版),2024,45(3):273-280.
收稿日期: 2022-04-20
基金项目: 先进能源科学与技术广东省实验室佛山分中心(佛山仙湖实验室)开放基金资助项目(XHD2020-003)
作者简介: 肖 哲(1994—),男,湖北孝感人,硕士研究生(whXiaozhe@163.com),主要从事汽车动力系统开发研究.
王宇宁(1976—),女,湖北武汉人,副教授(ynwang@whut.edu.cn),主要从事汽车预产品开发研究.
Power system matching and energy management of fuel cell vehicle
XIAO Zhe, WANG Yuning, ZHAO Guoqiang, HUANG Bin
(School of Automotive Engineering, Wuhan University of Technology, Wuhan, Hubei 430070, China)
Abstract: To analyze the impact of the power system parameter matching design and energy management scheme on the vehicle performance, taking a fuel cell vehicle as research object, the parameters of main power system components were matched. The power-following energy management strategy and the fuzzy control-based energy management strategy were proposed to improve the economic performance of the vehicle, and the sliding average filtering algorithm was used to optimize the output of the fuzzy control strategy. To model the vehicle and energy management system, the joint simulation platform was established based on AVL-Cruise and Simulink to verify the power performance of the vehicle, and the economic performance of the vehicle under three control strategies was comparatively analyzed. The results show that the fuel cell output power curve of the optimized energy management strategy is smoother and is always within the high-efficiency output interval. Based on the principle of fuel cell priority protection, the optimized energy management strategy has the best performance.
Key words: fuel cell vehicle; power matching; energy management; power following; fuzzy control
氫燃料电池具有能量转换效率高、废气排放低和噪声低等优点,是一种非常有前景的车用能源.氢燃料电池汽车是未来汽车可持续发展的重要研究方向之一,同时也是汽车领域治理全球环境污染和能源问题的重要方案之一[1].但是,燃料电池也存在一些缺陷,比如冷启动慢、动态特性差、无法进行制动能量回收等[2].合理的燃料电池汽车动力系统参数匹配以及能量管理策略能够使动力系统各关键部件协调工作,在满足汽车动力性的前提下提升其经济性能[3].刘世闯等[4]考虑了氢燃料电池保护优先的控制策略,其动力系统采用燃料电池+动力电池的混合驱动形式,并以此为基础完成了氢燃料电池重卡的动力系统主要零部件的参数匹配.杨坤等[5]从动力性、续驶里程、制动能量回收等方面考虑,确定了燃料电池汽车的动力系统选型. HU X.等[6]考虑了燃料电池衰退性能,提出了一种基于规则的模糊控制策略,利用遗传算法对模糊控制器进行实时优化,提升了燃料电池的寿命,但是,其实时计算量较大,难以应用于实际开发中.
笔者以某款燃料电池汽车为例,根据其动力性指标,对其动力系统进行匹配设计,并综合考虑动力电池荷电状态(state of charge,SOC)和燃料电池输出功率的变化.为了维持蓄电池SOC值的稳定,并保证燃料电池能够工作在其高效工作区间内,制定功率跟随式能量管理策略和基于模糊控制的能量管理策略,并采用滑动平均滤波算法对模糊控制策略输出量进行优化.同时,运用AVL-Cruise软件建立整车模型,采用Simulink搭建功率跟随式能量管理策略、基于模糊控制的能量管理策略以及滑动平均滤波算法模型,将两款软件进行联合仿真,验证匹配结果.
1 燃料电池汽车动力系统及设计目标
1.1 整车动力系统基本构成
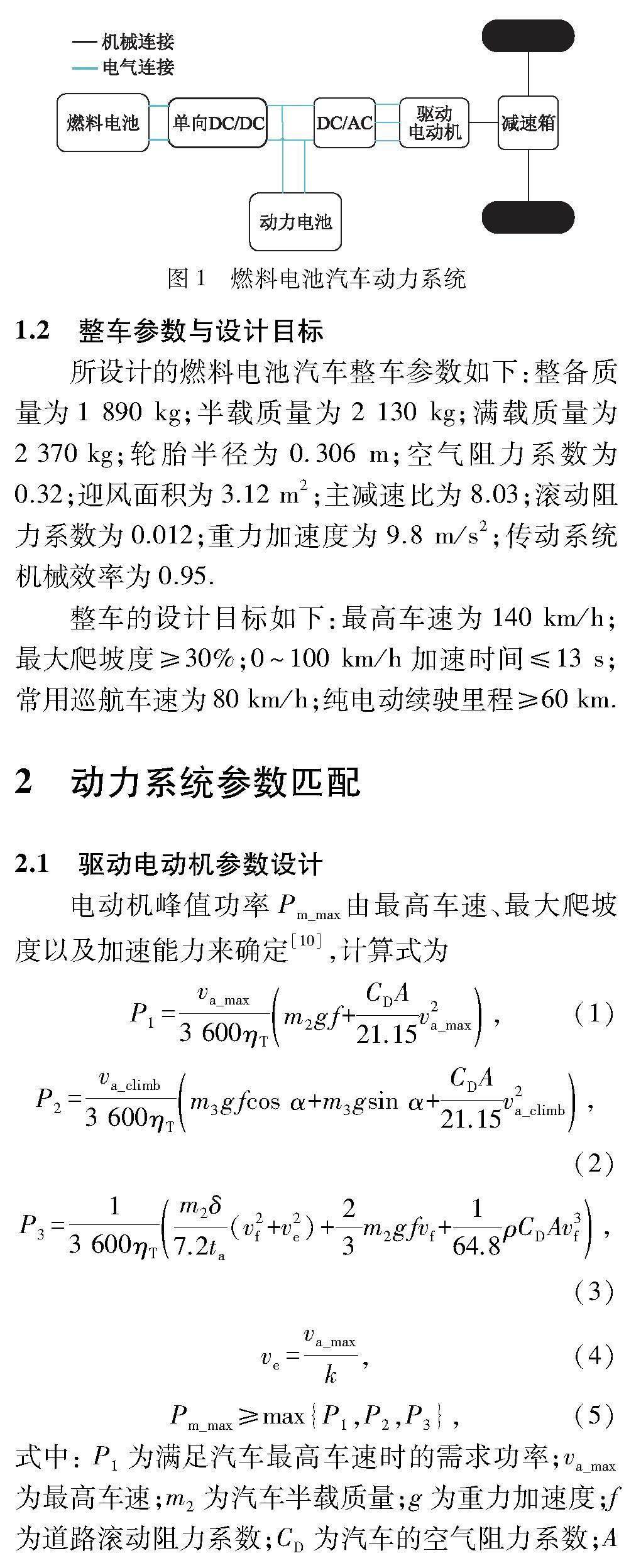
燃料电池汽车是指由电动机驱动,由燃料电池提供部分或全部电能的新能源汽车.动力系统是燃料电池汽车的核心部分,也是区别于传统汽车和其他车辆的重要标志[7].目前,在燃料电池汽车中运用较多的动力系统形式主要有2种:单燃料电池驱动形式和燃料电池加辅助能源的混合驱动形式[8].由于单燃料电池驱动的结构存在动态响应能力差、功率密度低、启动时间长等缺点,本研究采用燃料电池+动力蓄电池并联的结构为汽车动力系统供能.在该燃料电池汽车中,燃料电池作为增程器充当备用能源的角色,在动力电池难以满足行驶需求时开始工作,提供额外的能量驱动汽车行驶[9].该燃料电池的动力系统主要包括氢燃料电池、动力电池、驱动电动机、减速箱和车轮等部件,其动力系统如图1所示.
1.2 整车参数与设计目标
所设计的燃料电池汽车整车参数如下:整备质量为1 890 kg;半载质量为2 130 kg;满载质量为2 370 kg;轮胎半径为0.306 m;空气阻力系数为0.32;迎风面积为3.12 m2;主减速比为8.03;滚动阻力系数为0.012;重力加速度为9.8 m/s2;传动系统机械效率为0.95.
整车的设计目标如下:最高车速为140 km/h;最大爬坡度≥30%;0~100 km/h加速时间≤13 s;常用巡航车速为80 km/h;纯电动续驶里程≥60 km.
2 动力系统参数匹配
2.1 驱动电动机参数设计
电动机峰值功率Pm_max由最高车速、最大爬坡度以及加速能力来确定[10],计算式为
P1=va_max3 600ηTm2gf+CDA21.15v2a_max,(1)
P2=va_climb3 600ηTm3gfcos α+m3gsin α+CDA21.15v2a_climb,(2)
P3=13 600ηTm2δ7.2ta(v2f+v2e)+23m2gfvf+164.8ρCDAv3f,(3)
ve=va_maxk,(4)
Pm_max≥max{P1,P2,P3},(5)
式中: P1为满足汽车最高车速时的需求功率;va_max为最高车速;m2为汽车半载质量;g为重力加速度;f为道路滚动阻力系数;CD为汽车的空气阻力系数;A为汽车的迎风面积;ηT为传动系统效率;P2为满足汽车最大爬坡度时的需求功率;va_climb为爬坡时的车速;m3为汽车满载质量;α为汽车可克服的最大坡度角;P3为满足汽车加速性能时的需求功率;δ为旋转质量换算系数;vf为车辆加速时间的末速度;ve为电动机额定转速所对应的车速;ta为车辆加速时间;ρ为空气密度,取1.225 8 N·s2/m4; k为电动机扩大恒功率区系数,取3.
在选取电动机额定功率Pm_e时,一般主要考虑汽车的长时运行工况,本研究的设计目标为乘用燃料电池汽车,选取电动机额定功率为最高车速匀速行驶时的需求功率,即
Pm_e≥P1.(6)
設定电动机最高转速对应车辆最高车速,在求得电动机的峰值转速以后,由设定的电动机扩大恒功率区系数,可求得电动机的额定转速,计算式为
nmax≥30va_maxig3.6πrd,(7)
ne=nmaxk,(8)
式中: nmax为电动机峰值转速;ig为主减速器传动比;rd为汽车轮胎半径;ne为电动机额定转速.
确定电动机峰值功率和额定转速后,由电动机转矩、转速及输出功率关系可求得峰值转矩. 考虑车辆以一定车速驶上最大坡度时的工况需求,对电动机峰值转矩Tmax进行校核,计算式为
Tmax=30×1 000×Pm_maxπne,(9)
Tmax≥m2gfcos α+m2gsin α+CDA21.15v2a_climbrdigηT.(10)
综合考虑系统效率以及实际运用中的意外能量损耗,选取的驱动电动机技术参数如下:额定电压为360 V;峰值功率为150 kW;额定功率为50 kW;峰值转速为9 800 r/min;额定转速为3 300 r/min;峰值转矩为420 N·m.
2.2 动力蓄电池参数确定
对于燃料电池汽车而言,动力蓄电池是其主要动力源,在纯电动模式下,只有动力蓄电池为汽车提供能量,在进行动力电池选型时,在满足续驶里程的前提下,也要满足整车的功率需求.
车辆以常用车速等速巡航时,所需动力电池组的功率为
Pb=v3 600ηTηmηbm2gf+CDAv221.15,(11)
式中: v为车辆巡航时的车速;ηm为电动机工作效率;ηb为电池放电效率.
等速巡航时,车辆纯电动续驶里程与动力电池组输出能量之间的关系为
Wb1=PbS1vΔSOC,(12)
式中: Wb1为满足车辆等速巡航续驶里程要求时蓄电池组所需提供的能量;S1为车辆纯电动等速巡航时的续驶里程;ΔSOC为电池可用放电深度.
满足续驶里程的电池容量为
Cb1=1 000Wb1U,(13)
式中: U为电池组母线电压,其值保持与电动机电压一致.
满足电动机最大输出功率的电池容量为
Cb2=1 000Pm_maxkbUηmηb,(14)
式中: kb为电池的最大放电倍率.
综上所述,根据满足最大容量需求的原则,选取的动力蓄电池参数如下:单体电池电压为3.2 V;额定电压为360 V;单体电池数量为113块;电池容量为58 A·h.
2.3 燃料电池参数设计
燃料电池增程器应能够在动力电池电量不足或者动力电池出现故障的情况下保持车辆稳定行驶,并能满足一定的爬坡度需求,增程器额定功率为
PRE_e=vRE3 600ηTηmm2gf+CDA21.15v2RE+PAux,(15)
式中: vRE为行驶车速,其取值要根据车辆的动力性需求确定,一般在最高车速与巡航车速之间;PAux为非驱动负载消耗功率.
增程器的峰值功率PRE_max可比额定功率稍大,以便降低系统成本,也可以兼顾动力电池组最大充电能力的限制,即
PRE_max≤Pch_max,(16)
式中: Pch_max为动力电池组最大充电功率.
燃料电池的额定功率和峰值功率分别为
Pfc_e=PRE_eηDC_DC,(17)
Pfc_max=PRE_maxηDC_DC,(18)
式中: ηDC_DC为DC/DC转换器的工作效率.
综合考虑整车动力性和续驶里程的要求,选取的燃料电池参数如下:额定功率为50 kW;峰值功率为52 kW;氢气气源压力为35 MPa;氢气罐容积为120 L.
3 燃料电池汽车能量管理策略
常用的燃料电池汽车能量管理策略主要分为基于规则和基于优化2种类型,其中,基于规则的能量管理策略控制简单、工作可靠,在实际应用中较为广泛.笔者主要研究2种基于规则的能量管理策略,分别为功率跟随式能量管理策略和基于模糊控制的能量管理策略[11-13].
3.1 控制目标分析
所研究的燃料电池汽车为燃料电池+动力蓄电池的混合驱动结构,在制定能量管理策略之前,需要对这2种动力源的工作特性进行分析,充分发挥其性能,提高汽车的经济性能.
选取动力蓄电池的SOC-UOCV曲线如图2所示,其中UOCV为开路电压.
从图2可以看出:当SOC过高或者过低时,电池开路电压会发生突变,为防止电池瞬间的过放电和过充电,通常需要维持电池SOC在稳定区间内;当SOC在曲线的中段时,曲线的斜率接近于0,此时,动力电池工作较为稳定,且效率较高.根据这一特性,设定动力蓄电池SOC的理想工作区间为0.2~0.8,SOC理想的期望值为0.5.
选取的燃料电池电压、功率与电流的关系曲线如图3所示,功率与效率的关系曲线如图4所示.从图3、4可以看出:随着燃料电池工作电流的增加,电池输出功率增加,工作电压在降低,将燃料电池的工作电流控制在电流范围的中段可以获取较高的工作效率.设定燃料电池的理想输出功率区间为5~45 kW.
3.2 基于模糊控制的能量管理策略
模糊控制策略是一种基于规则的能量管理控制策略,其与传统的功率跟随式能量管理策略相比,具有更好的工况适应性.以整车需求功率Pvehicle以及动力电池实时SOC作为模糊控制器的输入,并以燃料电池输出功率Pfc为输出设计模糊控制器,所搭建的模糊控制器如图5所示.
将整车需求功率Pvehicle隸属度函数论域设置为[0,150],将Pvehicle的隶属度函数划分为{VS,S,M,B,VB},其中:VS为很小;S为小;M为中等;B为大;VB为很大.动力电池的实时SOC隶属度函数论域设置为[0.2,0.8],将动力电池的实时SOC的隶属度函数划分为{VS,S,M,B,VB}.燃料电池输出功率Pfc隶属度函数论域设置为[5,45],将Pfc的隶属度函数划分为{VS,S,M,B,VB}.上述变量的隶属度函数曲线分别如图6-8所示.模糊控制的结果是否能够达到预期,与模糊规则的制定有很大关系.本研究模糊规则的制定主要依据如下:当SOC较大时,主要由动力蓄电池输出功率;当SOC较低时,主要由燃料电池输出功率,并能给动力电池充电;当SOC在期望值附近时,燃料电池可实现一定的功率跟随. Pfc的模糊控制规则如表1所示.
3.3 功率跟随式能量管理策略
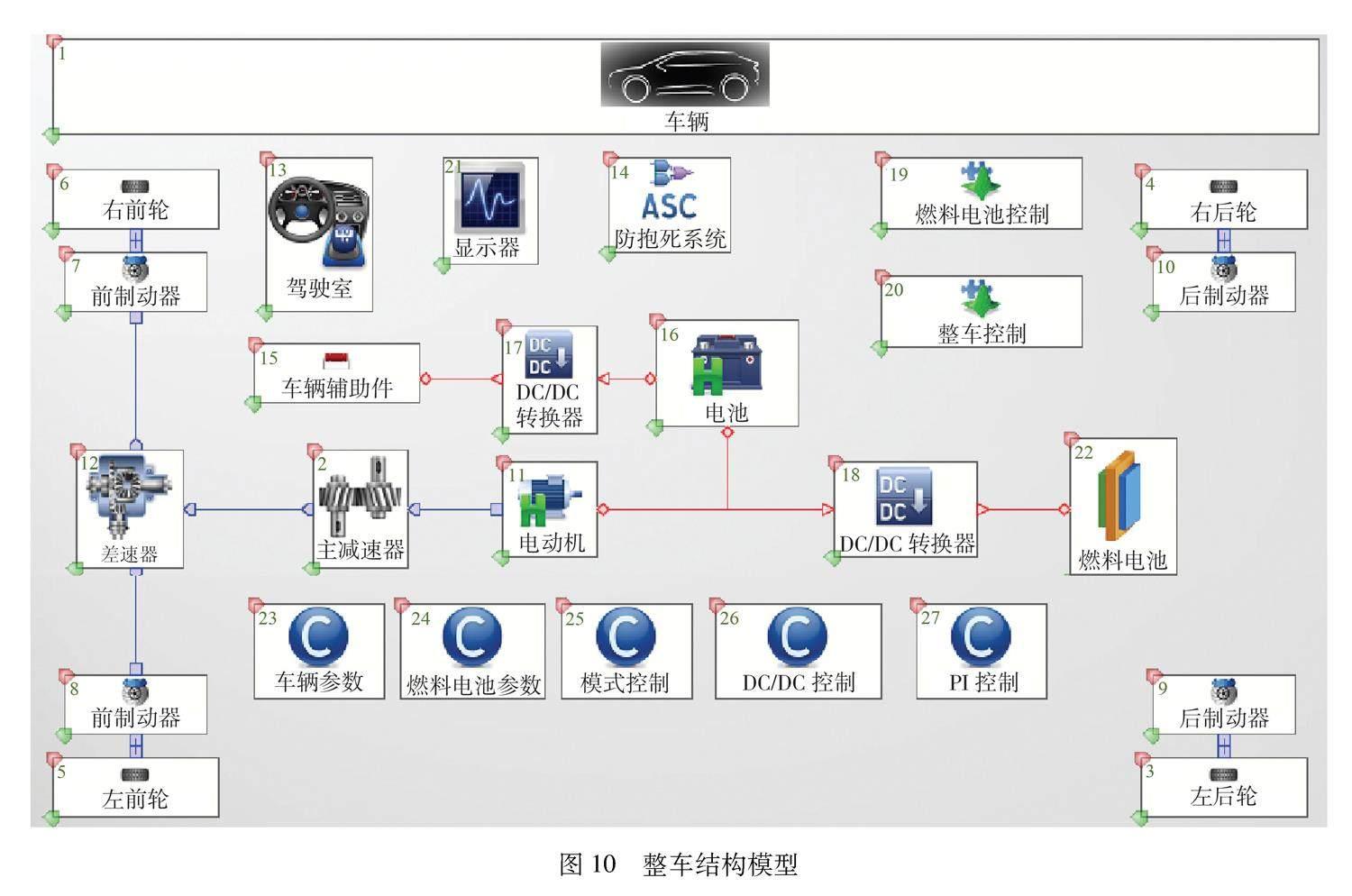
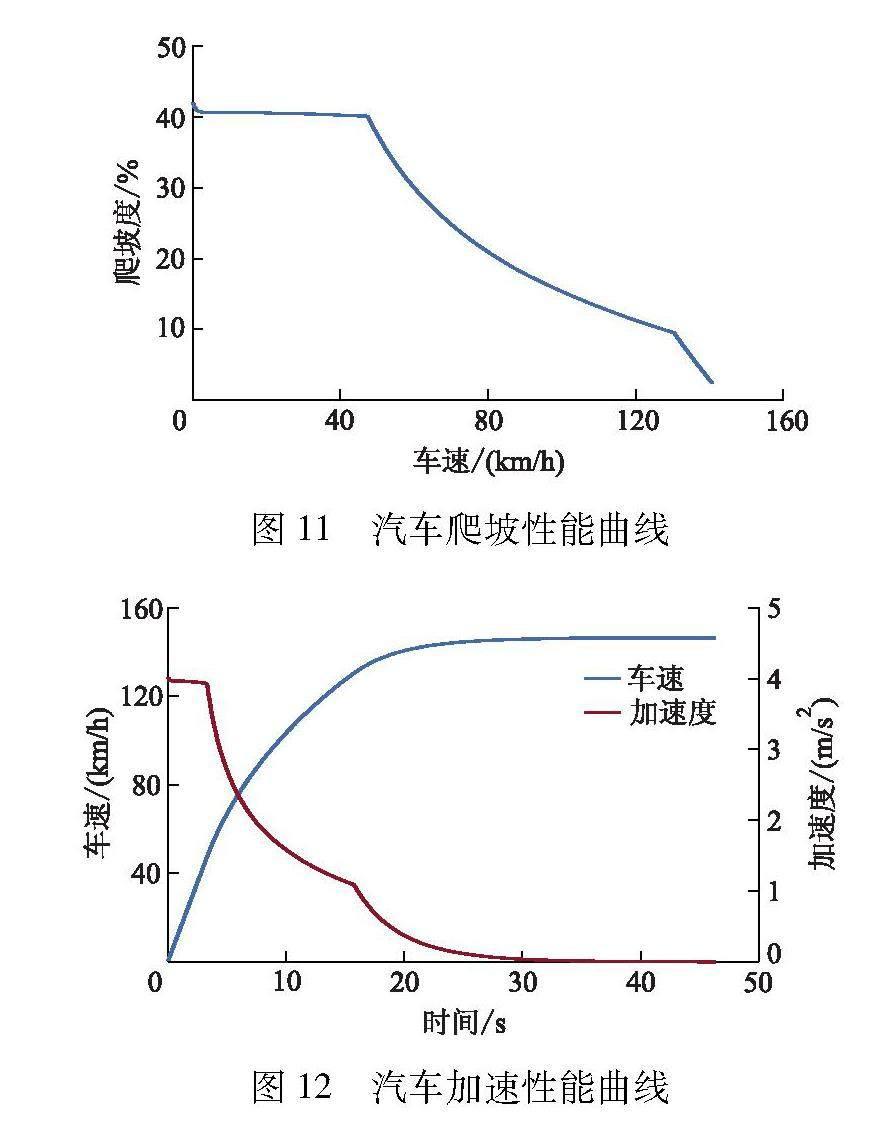
功率跟随式能量管理策略的基本控制思想是整车所需功率优先由燃料电池提供,不足部分由动力蓄电池进行补充.功率跟随式能量管理策略原理如图9所示,其中:Pvehicle为整车需求功率;Pfc为燃料电池输出功率;Pfc_max为燃料电池最大放电功率;Pfc_eff为燃料电池最佳放电功率;Pbat为动力蓄电池功率;Pbat_max为动力蓄电池最大充放电功率; SOCmax为动力蓄电池SOC上限;SOCmin为动力蓄电池SOC下限;SOCexp为动力蓄电池期望SOC.首先判断汽车是否处于制动状态,若处于制动状态,燃料电池处于关闭状态.之后根据动力蓄电池SOC来决定燃料电池的输出功率,将SOC值划分为4个区间,分别为SOC 根据图2所示的动力蓄电池SOC-UOCV曲线,当电池的SOC在曲线中段时,曲线的工作状态较为稳定,可认为此状态为动力蓄电池的高效工作区. 3.4 优化的模糊控制能量管理策略 模糊控制輸出功率虽然能够跟随整车需求功率,但是,在实际驾驶过程中路况较为复杂,整车需求功率会产生频繁且大幅度的变化,燃料电池的输出功率也会受到相应影响而导致燃料电池寿命急速降低,严重影响整车经济性能. 利用滑动平均滤波算法可以使燃料电池输出功率更加平滑,基本上不会在瞬间产生急剧的变化[14].滑动平均滤波算法的基本思想是设定一个宽度固定的滑动窗口,该窗口沿着时间序列滑动,同时取窗内数据的算术平均值作为输出值,而由输出值组成另一个数字序列,也就是滤波后的序列,其计算式为 Pfc=1N∑n-1t=0PT(T-t),(19) 式中: N为滑动窗口中数据的个数;PT为T时刻燃料电池的输出功率;T为采样时间;t为时间轴的时间. 将模糊控制器所输出的燃料电池功率作为滑动平均滤波算法的输入,得到更为平滑的燃料电池输出功率,可以避免燃料电池产生高频输出功率,大幅度增加了燃料电池的寿命. 4 整车建模及仿真分析 在选定好动力系统各部件参数以及整车能量管理策略以后,通过AVL-Cruise和Simulink搭建联合仿真平台. 4.1 整车模型建立 选用AVL-Cruise搭建整车模型框架,根据设计的车辆结构将所需要的模块放入主界面;然后根据前文匹配结果依次输入各部件对应的参数,按实际情况连接各部件之间的机械信号与电信号;最后在数据总线中将各部件之间的数据信号进行连接.搭建的整车结构模型如图10所示. 在Simulink中搭建整车控制策略,将其编译成dll文件在AVL-Cruise中进行联合仿真分析. 4.2 动力性仿真结果 汽车动力性主要考虑满载爬坡性能、满载最高车速和满载加速性能,汽车爬坡性能曲线、汽车加速性能曲线分别如图11、12所示,可以看出:汽车在车速为30 km/h时,爬坡度能够达到40.40%,满足设计需求;汽车在加速时,最高车速能够达到146.36 km/h,满足设计需求;0~100 km/h的加速时间为7.71 s,满足设计需求. 4.3 纯电动续驶里程仿真结果 汽车在纯电动状态下行驶时,燃料电池关闭,此时,整车全部能量都由动力蓄电池提供,纯电动模式下的续驶里程是考察汽车经济性能的主要指标之一.选取仿真初始SOC为0.8,直到SOC降为0.2时停止仿真,选取新欧洲汽车法规循环工况(new Europe driving cycle,NEDC)和汽车常用巡航车速进行仿真,纯电动模式下的续驶里程曲线如图13所示,NEDC下的纯电动续驶里程为68.65 km,等速巡航下的续驶里程为65.11 km,满足设计需求. 4.4 不同控制策略下的仿真结果 仿真设置的初始SOC为0.5,采用NEDC工况进行仿真分析,仿真结果如图14-17所示.从图14可以看出,实时车速基本与期望车速保持一致,表明整车输出功率基本能够满足行驶时的功率需求.从图15可以看出,功率跟随式能量管理策略的SOC最为稳定.从图16可以看出,优化后的模糊控制器输出功率最为稳定.从图17可以看出,基于模糊控制的能量管理策略氢气消耗量最少. 综上所述,3种能量管理策略的输出功率均能满足整车需求功率;功率跟随式能量管理策略能够有效维持动力蓄电池SOC稳定,但燃料电池输出功率波动非常大,会大幅度降低燃料电池寿命;基于模糊控制的能量管理策略氢气消耗量最小且燃料电池输出功率较为平缓,但在仿真结束时,其动力电池SOC值最低;优化后的能量管理策略其燃料电池输出功率最为平缓且输出功率都在燃料电池高效输出区间内,基于燃料电池优先保护原则,优化后的能量管理策略综合性能最为突出. 5 结 论 1) 所设计的燃料电池汽车能够满足最高车速、最大爬坡度以及100 km加速性能的需求. 2) 基于滑动平均滤波算法优化后的能量管理策略对于动力蓄电池SOC有一定的调节能力,能够保证动力蓄电池工作在舒适的SOC区间内. 3) 基于滑动平均滤波算法优化后的能量管理策略能够保证燃料电池输出功率保持平稳,即便在NEDC工况下,车速变化较快,仍然能维持燃料电池输出功率曲线的平滑性,能够避免燃料电池输出功率大幅度波动,可以有效提升燃料电池的寿命,基于燃料电池优先保护原则,此方案效果最佳. [WT5HZ]参考文献(References)[WT5”BZ] [1] SONG K, DING Y H, HU X, et al. Degradation adaptive energy management strategy using fuel cell state-of-health for fuel economy improvement of hybrid electric vehicle[J]. Applied Energy, DOI: 10.1016/j.apenergy.2020.116413. [2] LI W G, FENG G S, JIA S M, et al. Research on multi-energy management system of fuel cell vehicle based on fuzzy control[J]. Journal of Intelligent & Fuzzy Systems, 2021,40(4):6205-6217. [3] KANDIDAYENI M, MACIAS A, BOULON L. Efficiency upgrade of hybrid fuel cell vehicles′ energy management strategies by online systemic management of fuel cell[J]. IEEE Transactions on Industrial Electronics,2021,68(6):4941-4953. [4] 刘世闯,孙桓五,王瑞鑫,等. 大功率型氢燃料电池重卡动力系统匹配设计[J]. 汽车工程, 2021,43(2):196-203. LIU S C, SUN H W, WANG R X, et al. Matching design of power system for high power hydrogen fuel cell heavy-duty truck[J]. Automotive Engineering, 2021,43(2):196-203.(in Chinese) [5] 杨坤,王杰,肖军生,等. 某B级燃料电池电动汽车匹配设计研究[J]. 汽车工程学报, 2018,8(6):399-406. YANG K, WANG J, XIAO J S, et al. Study on the matching and design of a B-class fuel cell electric vehicle[J]. Chinese Journal of Automotive Engineering, 2018,8(6):399-406.(in Chinese). [6] HU X, LIU S K, SONG K, et al. Novel fuzzy control energy management strategy for fuel cell hybrid electric vehicles considering state of health[J]. Energies, DOI:10.3390/en14206481. [7] GAO J W, LI M, HU Y F, et al. Challenges and deve-lopments of automotive fuel cell hybrid power system and control[J]. Science China(Information Sciences), 2019,62(5):50-74. [8] 黄英英,文雪峰. 燃料电池汽车动力系统匹配方法研究[J]. 重型汽车, 2021(3):13-14. HUANG Y Y, WEN X F. Research on matching me-thod of fuel cell vehicle power system[J]. Heavy Truck, 2021(3):13-14.(in Chinese) [9] 孟祥飞. 增程式燃料电池电动汽车控制策略研究与开发[D]. 天津:天津科技大学, 2020. [10] 王瑞鑫. 大功率型燃料电池重卡动力系统匹配设计与能量管理策略研究[D]. 太原: 太原理工大学, 2021. [11] DENG K, LIU Y X, HAI D, et al. Deep reinforcement learning based energy management strategy of fuel cell hybrid railway vehicles considering fuel cell aging[J]. Energy Conversion and Management, DOI:10.1016/j.enconman.2021.115030. [12] SHEN D, LIM C C, SHI P. Fuzzy model based control for energy management and optimization in fuel cell vehicles[J].IEEE Transactions on Vehicular Technology, 2020, 69(12): 14674-14688. [13] ZHAO Z, WANG T, LI M,et al. Optimization of fuzzy control energy management strategy for fuel cell vehicle power system using a multi-islandgenetic algorithm[J]. Energy Science & Engineering, 2021,9(4):548-564. [14] 趙勇,谢金法,时佳威,等. 考虑燃料电池耐久性的FCHV复合能量管理策略[J]. 现代制造工程, 2020(4):70-76,158. ZHAO Y, XIE J F, SHI J W,et al. Energy management strategy of FCHV considering fuel cell durability[J]. Modern Manufacturing Engineering, 2020(4):70-76,158.(in Chinese) [JY,2][HT5SS](责任编辑 贾国方)
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12 03:00:52
电子制作(2019年16期)2019-09-27 09:34:44
电源技术(2017年1期)2017-03-20 13:38:09
环境科技(2016年5期)2016-11-10 02:42:12
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
西北工业大学学报(2015年1期)2016-01-19 03:29:52
池州学院学报(2015年3期)2016-01-05 01:13:18
电源技术(2015年11期)2015-08-22 08:50:38