智能车横向跟踪控制模式切换策略及评价方法
2024-05-31 04:23:49梁军李哲宇张星华国栋
江苏大学学报(自然科学版) 2024年3期
梁军 李哲宇 张星 华国栋


DOI: 10.3969/j.issn.1671-7775.2024.03.002
開放科学(资源服务)标识码(OSID):
摘要: 针对智能车横向跟踪控制算法传统切换策略中模型匹配策略总是处于激活状态,占用计算资源和运动平顺性变差的问题,设计了一种基于最小二乘支持向量机(least squares support vector machine, LSSVM)的控制模式切换策略,在不同工况下根据误差判断策略切换控制模式.从安全性、舒适性和跟踪精度3个方面构建控制效果评估函数,并根据多目标优化数学模型实时执行系统最优控制量.仿真试验结果表明:该切换策略能够保证智能车在不同工况下具有优秀的横向跟踪性能,路径跟踪偏差范围为±0.1 m,横摆角速度波动范围为±2 (°)/s,jerk值的范围为±10 m/s3,与传统的单一控制算法相比,具有更好的跟踪精度、稳定性和舒适性.
关键词: 智能车; 横向跟踪; 控制模式; 切换策略; 跟踪精度; 舒适性
中图分类号: U471.1 文献标志码: A 文章编号: 1671-7775(2024)03-0257-08
引文格式: 梁 军,李哲宇,张 星,等. 智能车横向跟踪控制模式切换策略及评价方法[J].江苏大学学报(自然科学版),2024,45(3):257-264.
收稿日期: 2022-04-11
基金项目: 国家重点研发计划项目(2018YFB1600500); 国家自然科学基金资助项目(51875225); 宝应县重点研发计划项目(BY201908)
作者简介: 梁 军(1976—),男,江苏扬州人,教授,博士生导师(liangjun@ujs.edu.cn),主要从事智能交通和智能车辆的研究.
李哲宇(1996—),男,江苏泰州人,硕士研究生(lizheyujs@163.com),主要从事智能交通仿真模型的研究.
Lateral tracking control mode switching strategy and
evaluation method for intelligent vehicle
LIANG Jun1, LI Zheyu1, ZHANG Xing1, HUA Guodong2
(1. Automotive Engineering Research Institute, Jiangsu University, Zhenjiang, Jiangsu 212013, China; 2. Jiangsu Smart Travel Future Automobile Research Institute Co., Ltd., Nanjing, Jiangsu 211111, China)
Abstract: To solve the problem that in traditional switching strategies for lateral tracking control algorithms in intelligent vehicles, the model matching strategy was always in active state with consuming computational resources and reducing motion smoothness, a control mode switching strategy based on least squares support vector machine (LSSVM) was designed. By the strategy, the control modes were dynamically switched based on error assessment under varying operational conditions. The control effectiveness was evaluated from three aspects of safety, comfort and tracking accuracy. The optimal control amount was executed in real time based on a multi-objective optimization mathematical model. The simulation results show that by the switching strategy, the superior lateral tracking performance in intelligent vehicles can be achieved under varying conditions with path tracking deviation range of ±0.1 m, yaw rate fluctuation range of ±2 (°)/s and jerk value range of ±10 m/s3. Compared to traditional single control algorithms, the proposed strategy exhibits improved tracking accuracy, stability and comfort.
Key words: intelligent vehicle; lateral tracking; control mode; switching strategy; tracking accuracy; comfort
随着汽车和交通领域的技术发展,人们对于在复杂多样道路环境下拥有更加安全、方便驾驶体验的需求日益增加,智能车应运而生,标志着驾驶场景逐渐由手动驾驶向自动驾驶转变.横向控制和纵向控制是自动驾驶的2项核心控制技术.其中,横向控制主要是通过控制车辆转向,使其能够准确地跟踪目标轨迹.目标路径跟踪和横向稳定性是横向控制的2个主要目标.
目前常见的横向跟踪控制算法主要包括比例-积分-微分 (proportional-integral-differential, PID)控制[1-2]、模型预测控制(model predictive control, MPC) [3-5]、 纯跟踪(pure pursuit, PP)控制[6]等,以及基于神经网络[7-8]、强化学习[9]等方法的优化控制方法.这些单一控制算法容易实现,但在复杂多变的工况下,很难达到最优控制效果.初亮等[10]提出了一种基于模糊控制的模式识别策略和基于冲击度限制的模式切换策略.蔡英凤等[11]设计了一种带稳定监督的切换策略,根据车速进行切换,低速工况下使用PID控制,高速工况下使用MPC控制.类似的多种控制算法协同工作模式虽然提高了多种工况下系统的鲁棒性和路径跟踪精度,但是关于控制算法切换策略的研究还存在一些问题,比如:在传统的切换策略中,模型匹配策略总是处于激活状态,占用大量计算资源;模式切换后,由于控制目标的改变,车辆运动状态容易发生突变,可能诱发加速度导数jerk值过大及运动平顺性变差等问题.
笔者设计一种基于最小二乘支持向量机(least squares support vector machine, LSSVM)算法的控制模式切换策略,根据误差判断策略实现模式切换,并且提出基于安全性、舒适性和跟踪精度的评价方法.
1 车辆动力学模型及运动状态估计
1.1 车辆动力学模型
1.1.1 车辆模型
搭建的四自由度车辆模型如图1所示,其中: Fxi(i=1,2,3,4分别代表左前轮、右前轮、左后轮、右后轮)为车辆受到的纵向力;Fyi为车辆受到的横向力;δf为前轮转角;df、dr分别为前后轮轮距;lf、lr分别为前轴和后轴距质心的距离;vx、vy分别为车辆的纵向和横向速度;β为质心侧偏角;ψ·为横摆角速度;hs为质心到侧倾中心的垂直距离;φ为侧倾角;ms为簧载质量;g为重力加速度;Fzi为车辆作用于轮胎的垂直荷载.
车辆动力学方程为
∑Fxi=mt(v·x-vyψ·),
∑Fyi=mt(v·y+vxψ·),
∑Mzi=Izψ··,(1)
式中: mt为整车质量;Iz为横摆惯性矩;Mzi为重心处z轴方向各车轮的力矩.
轮胎受力的计算公式为
∑Fxi=(Fx1+Fx2)cos δf-(Fy1+Fy2)sin δf+
Fx3+Fx4,
∑Fyi=(Fx1+Fx2)sin δf+(Fy1+Fy2)cos δf+
Fy3+Fy4,
∑Mzi=lf[(Fx1+Fx2)sin δf+(Fy1+Fy2)cos δf]-
lr(Fy3+Fy4)+df2[(Fy1-Fy2)sin δf-
(Fx1-Fx2)cos δf]+dr2(Fx3-Fx4).(2)
車辆在受到纵、横向加速度时,车辆作用于轮胎的垂直荷载Fzi也在一直变化,所以轮胎垂向的运动方程为
Fz1=mtglr2(lr+lf)-mtaxhs2(lr+lf)-mtayhslr0.5df(lr+lf),
Fz2=mtglr2(lr+lf)-mtaxhs2(lr+lf)+mtayhslr0.5df(lr+lf),
Fz3=mtglf2(lr+lf)+mtaxhs2(lr+lf)-mtayhslr0.5df(lr+lf),
Fz4=mtglf2(lr+lf)+mtaxhs2(lr+lf)+mtayhslr0.5df(lr+lf),(3)
式中: ax、ay分别为车辆的纵向、横向加速度.
1.1.2 轮胎模型
轮胎具有很强的非线性,在车辆横向运动中,轮胎模型精度决定其控制效果.横向加速度大于0.4g时,轮胎模型会逐渐转变为非线性.在小侧偏角情况下,可认为轮胎侧偏角与轮胎侧向力成线性关系,但随着侧偏角增大,侧偏力与侧偏角的关系会变为非线性.
车辆侧偏角与轮胎横向力的关系如图2所示,在沥青和积雪路面上,两者间斜率表示不同路面的轮胎侧偏刚度特性.其中,沥青、积雪路面分别表示具有高摩擦系数的高侧偏刚度和具有低摩擦系数的低侧偏刚度.
小侧偏角情况下,轮胎的纵向力和横向力分别为
Fxi=μλiFzi,
Fyi=-Cαiαi,(4)
式中: μ为道路附着系数;λi为轮胎滑移率;αi为侧偏角;Cαi为轮胎侧偏刚度.
大侧偏角情况下,根据Dugoff轮胎模型,轮胎的纵向力和横向力分别为
Fxi=Cσiλi1-λif(Si),
Fyi=Cαitan αi1-λif(Si),(5)
式中: σi为纵向滑移角;Cσi为轮胎纵向刚度.
α1
α2
α3
α4=δf
δf
0
0+εf
εf
εr
εrφ-vy+lfψ·vx-dfψ·/2
vy+lfψ·vx+dfψ·/2
vy-lrψ·vx-drψ·/2
vy-lfψ·vx+drψ·/2,(6)
式中: εf、εr分别为前后侧倾转向系数.
f(Si)=2-Si,Si<1,
1,Si≥1,
Si=μFzi(1-εrvxλ2i+tan2αi)2C2αiσ2i+C2σitan2αi(1-λ2i),
λi=Rwωi-vxmax(Rwωi,vx),(7)
式中: Rw为轮胎半径;ωi为轮胎角速度.
根据车辆横摆角速度ψ·、侧倾角速度φ·、侧倾角φ、质心侧偏角β、车辆速度v、车轮角速度ω、纵向加速度ax、横向加速度ay、轮胎受力等参数,推导出车辆状态方程.首先,定义状态变量为
x(t)=[ψ·φ· φ v β Fy1 Fy2 Fy3 Fy4 Fx1 Fx2 Fx3 Fx4].(8)
车辆模型量测输出矩阵为
y(t)=[ax ayψ·φ· ω1 ω2 ω3 ω4].(9)
则非线性轮胎模型的车辆状态方程为
x·(t)=f(x(t),u(t))+(t),
y(t)=h(x(t),u(t))+ν(t),(10)
式中: u(t)为输入变量,u(t)=[δf ω1 ω2 ω3 ω4];(t)、v(t)分别为均值为0的系统过程噪声和量测噪声.
1.2 基于IMM-UKF的运动状态估计
实际行驶中,车辆横向运动受路面状况影响很大,因此,设计基于多模型交互(interacting multiple model, IMM)算法和无迹卡尔曼滤波(unscented Kalman filter, UKF)对沥青、积雪等路面进行车辆模型估计.该算法包含交互、滤波、更新和融合估计4个步骤[12].
步骤1: 输入交互.πij为从模式i到j的马尔科夫转移概率,令
πij=0.950.050.050.95.(11)
μi(k)為模型i在k时刻的模型概率,则k-1时刻的混合概率为
μi|jk-1|k-1=1ηjbij μik-1,(12)
式中: bij为πij中的元素;ηj=∑2i=1(bij μik-1)为量纲一因数,i,j=1、i,j=2分别表示考虑沥青、积雪路面转弯刚度特性的车辆模型.
模型j在k时刻的混合初始状态、混合初始协方差分别为
x~jk-1|k-1=∑2i=1(μi|jk-1|k-1x^ik-1|k-1),(13)
P~jk-1|k-1=∑2i=1[μi|jk-1|k-1(P^ik-1|k-1+QQT)],(14)
式中: Q=x~jk-1|k-1-x^ik-1|k-1,x^ik-1|k-1、P^ik-1|k-1分别为模型j在前一采样时间的估计状态和估计协方差.
步骤2:UKF滤波.得到k时刻的初值后,执行模型匹配滤波,将求得的混合初始状态和协方差设为与模型j匹配的UKF的输入.首先预测2个模型的状态,协方差增益为
Kjk=P-xy,jk|k-1(P-jx,k|k-1)-1.(15)
滤波为
x^jk|k=x-jk|k-1+Kjk(yjk-yjk|k-1).(16)
滤波协方差为
P^x,jk|k=P^x,jk|k-1-KjkP^y,jk|k-1(Kjk)T.(17)
步骤3: 概率更新.在高斯分布假设下,每个模型j在k时刻的似然函数为
Λjk=exp-12(zik)T(sik)-1zik|2πSjk|,(18)
式中: zik为残差,zik=yk-(Hik)Tx^ik|k-1;Sik为对应协方差,Sik=HikPik|k-1(Hik)T+Rik.
得到模式j概率更新为
μjk|k=μjk-1|k-1Λjk∑2i=1(μjk-1|k-1Λik).(19)
步骤4: 融合估计.该步骤得到k时刻的状态估计、协方矩阵分别为
x^k|k=∑2j=1 (μjk|kx^jk|k),(20)
P^k|k=∑2j=1{μjk|k[P^jk|k+(x^jk|k-x^k|k)(x^jk|k-x^k|k)T]}.(21)
2 控制模式切换策略
2.1 横向跟踪工况划分
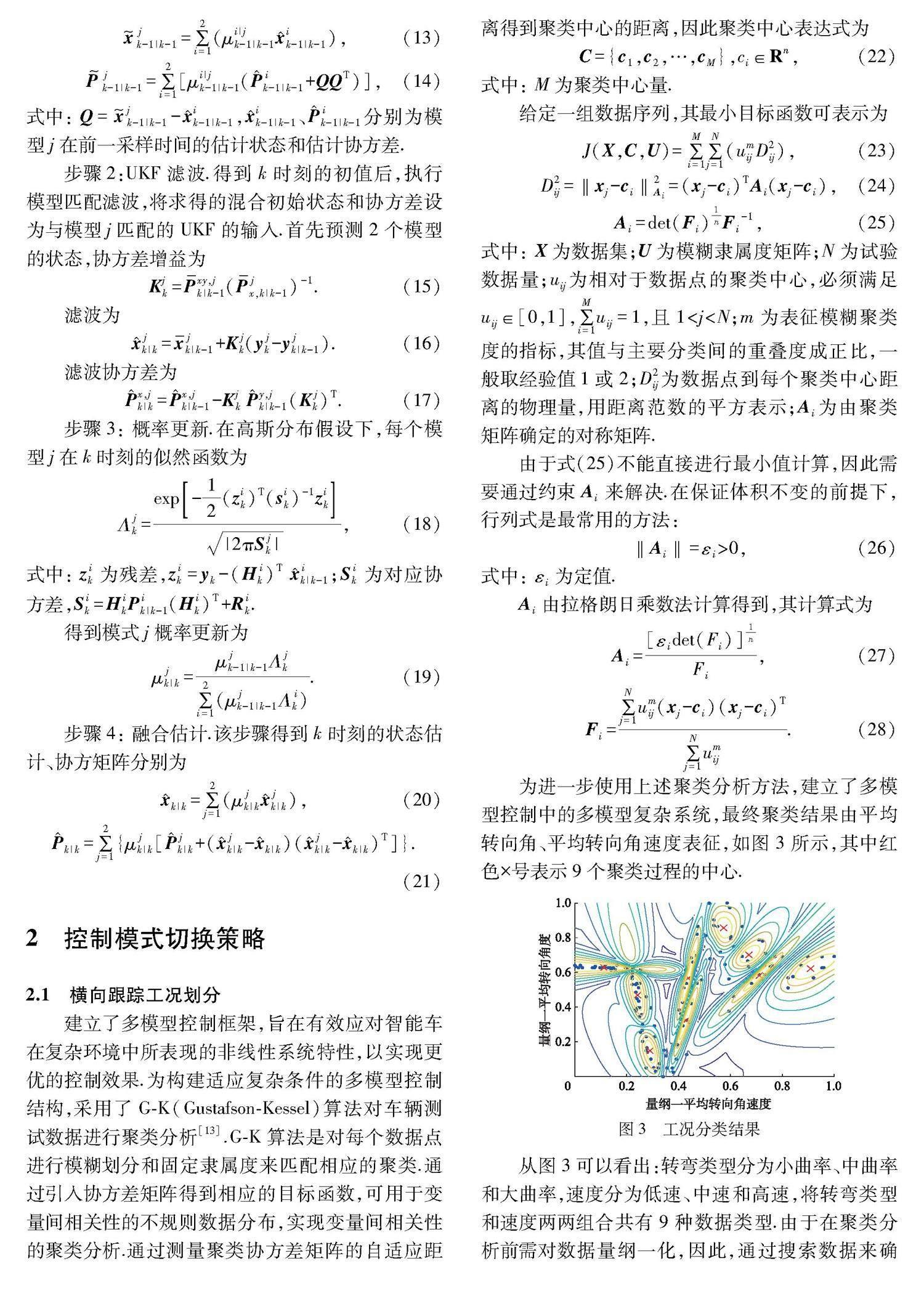
建立了多模型控制框架,旨在有效应对智能车在复杂环境中所表现的非线性系统特性,以实现更优的控制效果.为构建适应复杂条件的多模型控制结构,采用了G-K(Gustafson-Kessel)算法对车辆测试数据进行聚类分析[13].G-K算法是对每个数据点进行模糊划分和固定隶属度来匹配相应的聚类.通过引入协方差矩阵得到相应的目标函数,可用于变量间相关性的不规则数据分布,实现变量间相关性的聚类分析.通过测量聚类协方差矩阵的自适应距离得到聚类中心的距离,因此聚类中心表达式为
C={c1,c2,…,cM},ci∈Rn,(22)
式中: M为聚类中心量.
给定一组数据序列,其最小目标函数可表示为
J(X,C,U)=∑Mi=1∑Nj=1(umijD2ij),(23)
D2ij=‖xj-ci‖2Ai=(xj-ci)TAi(xj-ci),(24)
Ai=det(Fi)1nFi-1,(25)
式中: X为数据集;U为模糊隶属度矩阵;N为试验数据量;uij为相对于数据点的聚类中心,必须满足uij∈[0,1],∑Mi=1uij=1,且1 由于式(25)不能直接进行最小值计算,因此需要通过约束Ai来解决.在保证体积不变的前提下,行列式是最常用的方法: ‖Ai‖=εi>0,(26) 式中: εi为定值. Ai由拉格朗日乘数法计算得到,其计算式为 Ai=[εidet(Fi)]1nFi,(27) Fi=∑Nj=1umij(xj-ci)(xj-ci)T∑Nj=1umij.(28) 为进一步使用上述聚类分析方法,建立了多模型控制中的多模型复杂系统,最终聚类结果由平均转向角、平均转向角速度表征,如图3所示,其中红色×号表示9个聚类过程的中心. 从图3可以看出:转弯类型分为小曲率、中曲率和大曲率,速度分为低速、中速和高速,将转弯类型和速度两两组合共有9种数据类型.由于在聚类分析前需对数据量纲一化,因此,通过搜索数据来确定转向角、转向角速度的上下限. 为进一步科学评估聚类效果的结果,选择分配系数PC和分类熵CE进行度量.PC用于度量集群间的重叠,其计算式为 PC(M)=1N∑Mi=1∑Nj=1u2ij.(29) CE用于度量每个集群划分的模糊度,其计算式为 CE(M)=-1N∑Mi=1∑Nj=1(uijlog uij).(30) 当PC(M)达到最大值且CE(M)达到最小值时,可得到2个评估系数的最优值.即PC(M)值越大聚类效果越好,CE(M)值越小分类效果越好. 2.2 基于LSSVM的回归处理 支持向量机(support vector machine, SVM)是用于数据分类和回归的理论算法,本节主要利用其强大的数据回归功能进行回归处理.但由于SVM的约束条件为不等式约束,大大限制了拉格朗日乘子的求解,而最小二乘支持向量机则将SVM方法中的不等式约束转变为等式约束,将二次规划问题转化为解线性方程组问题[14],简化了计算过程.其优化目标数学表达式为 minω,e J(ω,e)=12ωTω+γ12∑Ni=1e2i, s.t. yi=ωTφ(xi)+b+ei,(31) 式中: φ(xi)为核空间映射函数;ω为权重向量;ei为误差变量;b为偏差值;γ为正则参数. 求对偶问题的计算式为 Xj=0ET EΩij+I/γba=0y,(32) 式中: E=[1 1 … 1]T;a=[a1 a2 … aN]T;I为单位矩阵;Ωij=φ(xi)Tφ(xj); y=[y1 y2 … yN]T. 通过求解式(32),得到优化变量a和b,然后通过LSSVM模型y(x)=∑Ni=1(aiK(xi,x))+b进行回归处理.该方法相较于SVM提升了计算效率,降低了计算时间. 2.3 模式切换策略 在多模型控制结构中,模式切换是关键.采用欧式距离来度量输入变量和聚类中心的实际距离,即 d=∑ni=1|xi-x0|2,(33) 式中: d为区分每个模型的指标;x0为每个聚合组的聚类中心. 在计算时需要循环迭代,迭代过程中需实时计算每个聚类中心的实际距离.根据最小距离原则而确定当前类别,然后将系统的当前模型切换至子模型中得到预测输出. 由于智能车控制系统是多输入输出的非线性控制系统,令控制系统输出为O(τ),估计输出为O^(τ),则当前系统偏差为 e(τ)=O(τ)-O^(τ),(34) 式中: τ为当前采样时间. 传统的间接切换方法中,模型匹配策略总是处于激活状态,因此系统运行需要大量计算资源.考虑到系统工作环境并非时刻变化,为降低计算负载,减少非必要的控制器切换次数,提出一种引入误差判断策略和模型匹配策略的新型切换策略,根据误差判断值和模型匹配结果进行控制策略切换 [14]. 误差判断策略是新型切换策略的关键,主要用于計算误差判断值[15],其表达式为 J(τ)=ζe2(τ)+θ∑kτ=0ξk-τe2(τ),(35) 式中: J(τ)为误差判断值;ζ为实际控制误差权重;θ为控制误差的历史权重;ξ为决定遗忘速度的遗忘因子. 通过选择适当的遗忘因子,可以去除早期控制误差数据,并有效保存当前周期的误差数据,使得切换策略更精准.此外,可避免因瞬态冲击引发的不必要的模型匹配和控制器切换.只有当误差判断值大于阈值时,才会激活模型匹配策略. 3 评价方法 横向控制需要满足驾驶安全、舒适和按目标路径行驶等要求,因此建立了安全性目标函数Js、舒适性目标函数Jc、精度目标函数Ja作为评价指标.根据系统约束条件,需构建实时多目标优化问题的数学模型对各指标进行优化. 3.1 评价指标 3.1.1 安全性指标 Js由车辆横向加速度性能Js1和侧倾角性能Js2决定.Js1可表示为 Js1=∫τa0ay(t)a^y2dt,(36) 式中: ay(t)为t时刻的横向加速度;a^y为横向加速度标准阈值;τa为测试时间. Js2可表示为 Js2=∫τa0φ(t)φ^2dt,(37) 式中: φ(t)为侧倾角;φ^为侧倾角标准阈值. Js可表示为 Js=ws1J2s1+ws2J2s2ws1+ws2,(38) 式中: ws1和ws2分别为横向加速度性能和侧倾角性能权重. 3.1.2 舒适度性能指标 Jc由车辆横摆角速度性能Jc1和纵向加速度性能Jc2决定.Jc1可表示为 Jc1=∫τa0ψ·(t)ψ·^2dt,(39) 式中:ψ·^为横摆角速度标准阈值. Jc2可表示为 Jc2=∫τa0ax(t)a^x2dt,(40) 式中: ax(t)为t时刻的纵向加速度;a^x为纵向加速度标准阈值. Jc可表示为 Jc=wc1J2c1+wc2J2c2wc1+wc2,(41) 式中: wc1和wc2分别为横摆角速度性能和纵向加速度性能权重. 评价舒适度的重要指标还有冲击度,即加速度导数jerk,我国推荐 jerk 值范围为±17.64 m/s3. 3.1.3 精度指标 Ja由车辆轨迹跟踪误差指标Ja1和方向误差指标Ja2决定.Ja1可表示为 Ja1=∫τa0f(t)-y(t)T^2dt,(42) 式中: f(t)为期望行驶轨迹;y(t)为实际行驶轨迹;T^为轨迹误差标准阈值. Ja2可表示为 Ja2=∫τa0vx(t)-ψ(t)D^2dt,(43) 式中: vx(t)为t时刻的纵向速度;ψ(t)为横摆角;D^为方向误差标准阈值. Ja可表示为 Ja=wa1J2a1+wa2J2a2wa1+wa2,(44) 式中: wa1和wa2分别为轨迹跟踪误差指标和方向误差权重. 上述指标的阈值和权重均由大量实际驾驶数据确定. 3.2 基于多目标优化的评价模型 根据上述3项指标,可得到多目标优化的数学模型: min y=[JsJcJa]T, s.t.ay(t)∈[-2.25,2.25], φ(t)∈[-3,3], ψ·(t)∈[-4,4], ax(t)∈[-2,2], f(t)-y(t)∈[-0.2,0.2], vx(t)ψ(t)∈[-1.2,1.2], ws1+ws2=wc1+wc2=wa1+wa2=1.(45) 计算控制变量y的最小值,即可得到系统最优控制量,在计算过程中可通过调整搜索范围满足上述约束. 4 试验验证 4.1 试验设计 仿真试验基于Carsim/Simulink联合仿真平台,测试切换策略的有效性和优越性.利用Carsim/Si-mulink软件搭建试验场景和控制模型.Carsim中车辆的部分关键参数如下:整车质量为1 370 kg;前、后轮胎侧偏刚度分别为-66 479、-60 068 N/rad;质心高度为 0.520 m;轮胎滚动半径为 0.320 m;前轴和后轴距质心的距离分别为1 110、1 670 mm. 试验设计了单移线工况、双移线工况,验证LSSVM切换策略的跟踪精度、稳定性和舒适性.通过参考轨迹和实际轨迹的对比图验证跟踪精度,通过横摆角速度随时间的变化曲线验证稳定性,通过冲击度随时间的变化曲线验证舒适性.同时,将只根据车速进行切换的速度切换策略作为对比试验,验证所提方法的优越性. 4.2 仿真结果及分析 4.2.1 单移线工况 变道超车过程是一种常见的路径跟踪工况,可视为单移线工况.选用的单移线曲线方程为 Y=d12ππ+2πlX-l2+sin2πlX-l2,(46) 式中: d1、l为控制参数;X为车辆横向位移;Y为车辆纵向位移. 本研究选取: d1=4 m;l=100 m. 单移线工况仿真结果如图4所示. 4.2.2 双移线工况 双移线工况也是一种常见的测试工况,可以很好地验证车辆的路径跟踪性能和行驶稳定性.双移线工况仿真结果如图5所示. 选用的双移线曲线方程[16]为 Y=dy12(1+tanh z1)-dy22(1+tanh z2),(47) 式中: z1=2.425X-27.19-1.2; z2=2.421.95X-56.46-1.2;dy1= 4.05;dy2= 5.70. 單移线工况下道路曲率变化较小,双移线工况下道路曲率变化较大,从图4、5可以看出,在2种工况下智能车都能做到准确地跟踪目标路径,体现了该控制策略对变曲率道路环境的良好适应性.从图4a可以看出,在横向位移31 m处,参考轨迹与实际轨迹的偏差达到最大值0.07 m.从图5a可以看出,在横向位移54 m处,参考轨迹与实际轨迹的偏差达到最大值0.09 m.车辆在大曲率路段易出现轨迹偏差,但是在仿真试验中,路径跟踪偏差范围始终控制为±0.1 m,相比于1.795 m的车身宽度,该偏差非常小,证明了LSSVM切换策略具有优秀的目标路径跟踪性能.从图4b、5b可以看出,LSSVM切换策略相较于速度切换策略,横摆角速度波动范围为±2 (°)/s,抖动更小,变化更加平稳,在行驶稳定性方面具有明显优势.从图4c、5c可以看出,在车辆起步及控制模式切换时冲击度较大,冲击度的范围为±10 m/s3,即jerk值的范围为±10 m/s3,满足行车舒适性(我国推荐jerk值为±17.64 m/s3). 5 结 论 1) 针对车辆在不同工况下的横向动力学特性差异,设计了基于LSSVM算法的控制模式切换策略,根据误差判断策略和当前工况智能切换控制模式以达到最优控制效果.设计了以安全性、舒适度、控制精度为评价指标的智能车横向控制模式切换实时多目标优化数学模型及指标优化方法.仿真试验结果表明:设计的基于最小二乘支持向量机的控制模式切换策略,能够保证智能车在不同工况下具有优秀的横向跟踪性能,路径跟踪偏差范围为±0.1 m,横摆角速度波动范围为±2 (°)/s,jerk值的范围为±10 m/s3,与传统的单一控制算法相比,具有更好的跟踪精度、稳定性和舒适性. 2) 未来计划将所设计的切换策略移植到实车上验证不同工况下的横向跟踪性能、计算资源消耗及评价方法的效能. [WT5HZ]参考文献(References)[WT5”BZ] [1] NIE L Z, GUAN J Y, LU C H, et al.Longitudinal speed control of autonomous vehicle based on a self-adaptive PID of radial basis function neural network[J].IET Intelligent Transport Systems, 2018,12(6):485-494. [2] QI W Q. Fuzzy control strategy of pure electric vehicle based on driving intention recognition[J]. Journal of Intelligent & Fuzzy Systems, 2020,39(4):5131-5139. [3] GUO H Y, SHEN C, ZHANG H, et al. Simultaneous trajectory planning and tracking using an MPC method for cyber-physical systems:a case study of obstacle avoidance for an intelligent vehicle[J].IEEE Transactions on Industrial Informatics, 2018,14(9):4273-4283. [4] HUNG N T, PASCOAL A M, JOHANSEN T A. Coope-rative path following of constrained autonomous vehicles with model predictive control and event-triggered communications[J].International Journal of Robust and Nonlinear Control, 2020,30(7):2644-2670. [5] TRAN A, MURALEEDHARAN A, OKUDA H,et al. Scenario-based stochastic MPC for vehicle speed control considering the interaction with pedestrians[J].IFAC-Papers OnLine, 2020,53(2):15325-15331. [6] AHN J, SHIN S, KIM M,et al. Accurate path tracking by adjusting look-ahead point in pure pursuit method[J]. International Journal of Automotive Technology, 2021,22(1):119-129. [7] SONG H M, WOO J, KIM H K. In-vehicle network intrusion detection using deep convolutional neural network[J]. Vehicular Communications, DOI:10.1016/j.vehcom.2019.100198. [8] JI X W, HE X K, LYU C, et al. Adaptive-neural-network-based robust lateral motion control for autonomous vehicle at driving limits[J]. Control Engineering Practice, 2018,76:41-53. [9] WASALA A, BYRNE D, MIESBAUER P, et al. Tra-jectory based lateral control: a reinforcement learning case study[J]. Engineering Applications of Artificial Intelligence, DOI:10.1016/j.engappai.2020.103799. [10] 初亮,張培志,林婷婷. 纯电动轿车模式识别及模式切换策略[J].华中科技大学学报(自然科学版), 2014,42(6):12-16. CHU L, ZHANG P Z, LIN T T. Study on mode recognition and mode switching strategy of electric vehicle[J].Journal of Huazhong University of Science and Technology(Natural Science Edition), 2014,42(6):12-16.(in Chinese) [11] 蔡英凤,李健,孙晓强,等. 智能汽车路径跟踪混合控制策略研究[J]. 中国机械工程,2020,31(3):289-298. CAI Y F, LI J,SUN X Q, et al. Research on hybrid control strategy for intelligent vehicle path tracking[J].China Mechanical Engineering, 2020,31(3):289-298.(in Chinese) [12] KIM D J , LEE S H , CHUNG C C. Interacting multiple model Kalman filter based vehicle lateral motion estimation under various road surface conditions[C]∥IEEE Conference on Control Technology and Applications. Piscataway,USA:IEEE,2018:1234-1239. [13] TANG F, LI C S. Intelligent vehicle lateral tracking control based on multiple model prediction[J]. AIP Advances, DOI:10.1063/1.5141506. [14] 吴青,臧博研,祁宗仙,等.基于压缩感知的多核稀疏最小二乘支持向量机[J].系统工程与电子技术,2019,41(9):1930-1936. WU Q, ZANG B Y, QI Z X, et al. Multi-kernal sparse least square support vector machine using compressive sensing[J].Journal of Systems Engineering and Electronics, 2019,41(9):1930-1936.(in Chinese) [15] HUANG G M,YUAN X F,SHI K,et al. A BP-PID controller-based multi-model control system for lateral stability of distributed drive electric vehicle[J]. Journal of the Franklin Institute:Engineering and Applied Mathematics, 2019,356(13):7290-7311. [16] 龔建伟,姜岩,徐威. 无人驾驶车辆模型预测控制[M]. 2版.北京:北京理工大学出版社, 2020. [JY,2][HT5SS](责任编辑 贾国方)
猜你喜欢
福建轻纺(2022年4期)2022-06-01 06:26:06
现代仪器与医疗(2021年2期)2021-07-21 02:19:12
建筑热能通风空调(2018年5期)2018-07-09 03:16:38
池州学院学报(2017年3期)2017-10-16 01:38:35
商场现代化(2016年29期)2016-12-23 00:01:03
商业会计(2016年12期)2016-10-08 01:05:54
中国市场(2016年21期)2016-06-06 04:28:28
中国科技博览(2016年9期)2016-04-25 20:06:46
中国科技博览(2016年7期)2016-04-25 06:16:36
消费者报道(2016年3期)2016-02-28 19:07:32