割刀自适应的采茶装置设计与分析
2024-05-30 11:53:39喻世龙刘杨陈伟祥任金波郑书河
中国农机化学报 2024年5期
关键词:运动学
喻世龙 刘杨 陈伟祥 任金波 郑书河

摘要:针对现有采茶机作业时老、嫩茶叶一刀切、嫩芽切碎及茶树机械损伤等问题,设计一种割刀自适应调节的采茶装置。根据坡地茶园地形参数和茶茎力学特性,确定采茶装置的机械及结构参数,使得割刀自适应采茶;通过对采茶装置运动学和动力学分析,建立割刀水平调节过程运动学方程和割刀切入角调节过程动力学方程,确定影响割刀运动的主要因素为:茶茎对割刀的反作用力、曲柄长度、摇杆长度和铰链安装长度;利用力矩平衡原理,得到割刀纵向偏转的充要条件,确定茶茎反作用力范围为0~55.42 N;采用Adams开展对割刀水平调节过程仿真分析,确定最优曲柄长度、摇杆长度和铰链安装长度分别为330 mm、200 mm和500 mm。
关键词:采茶装置;割刀自适应;运动学;Adams仿真
中图分类号:S225.99
文献标识码:A
文章编号:2095-5553 (2024) 05-0036-07
收稿日期:2023年6月20日 修回日期:2023年9月15日*基金项目:福建省农业科技引导性项目(2022N0009);福建农林大学茶全产业链创新与服务体系建设项目(K1520005A05)
第一作者:喻世龙,男,1998年生,四川达州人,硕士研究生;研究方向为农业机械化工程。E-mail: 2249956959@qq.com
通讯作者:郑书河,男,1976年生,福州人,博士,教授,博导;研究方向为农业物料特性和农业装备。E-mail: zsh@fafu.edu.cn
Design and analysis of tea-plucking device with adaptive adjustment of cutter
Yu Shilong1, Liu Yang1, Chen Weixiang1, Ren Jinbo1, 2, Zheng Shuhe1, 2
(1. College of Mechanical and Electrical Engineering, Fujian Agriculture and Forestry University, Fuzhou,
350100, China; 2. Fujian Engineering Research Center of Modern Agricultural Equipment, Fuzhou 350100, China)
Abstract:
Aiming at the problems of indiscriminate cutting of old and young tea leaves, crushing of tender buds, and mechanical damage to tea trees in the existing tea pickers, a tea-plucking device with automatic cutter adjustment was designed in this paper. Based on the terrain parameters of sloped tea plantations and the mechanical properties of tea stems, the mechanical and structural parameters of the harvesting device were determined, enabling flexible tea harvesting by the cutter. Through kinematic and dynamic analysis of the plucking device, the kinematic equations for horizontal cutter adjustment and dynamic equations for cutter cutting angle adjustment were established, identifying the main factors influencing cutter motion as the counterforce of the tea stem on the cutter, crank length, rocker arm length, and hinge mounting length. By using torque equilibrium principles, the necessary and sufficient conditions for longitudinal cutter deflection were obtained, determining the counterforce range as 0-55.42N. Adams simulations of the horizontal cutter adjustment process were utilized to identify optimum crank length, rocker arm length, and hinge mounting length as 330 mm, 200 mm and 500 mm, respectively.
Keywords:
tea-plucking device; adaptive cutter; kinematics; Adams simulation
0 引言
茶作為一种绿色饮料,含有丰富的茶多酚、生物碱和氨基酸等营养物质,深受大众喜爱[1]。茶叶采摘是茶叶生产过程的重要环节,直接影响茶的品质和产量[2]。针对大宗茶机械化采摘,日本起步最早,如早期的单人采茶机、双人采茶机。近年来,寺田制作所研制了一种乘坐式采茶机[3],采用高地隙液压履带底盘,配套往复式切割器和茶叶收集装置,割刀高度可调,实现茶叶采摘机械化。但由于国内茶园管理规范不一、茶园地形以山地丘陵为主、成本较高,大型机械作业难以推广,而便携式采茶机因其携带方便、操作简单而广受欢迎[4-6]。
目前国内常用的采茶机类型为:NV45(60)H型单人背负式采茶机,4C-525型单人手提式电动采茶机,CS-100型、SVR-110型、PHV-100型双人担架式采茶机等。其切割原理均为往复式,与螺旋滚刀式和水平圆盘刀式相比,往复式切割工作效率相对较高[1, 7, 8]。杜哲[6]、王升[9]等先后开展茶叶茎秆力学特性、双动刀往复式采茶机能耗及结构参数的研究,确定了最佳齿距、齿高、刀机速比[10]。闫晶晶[11]研制了割刀高度可调的自走式履带采茶机,汤一平等[12]研制了基于机器视觉的乘坐式采茶机,通过间接法确定割刀与嫩芽的距离,从而调整割刀高度。赵润茂[13]、吴敏[14]等分别提出使用超声波和激光雷达的方法检测割刀与嫩芽距离的分布式仿形采茶机,减小嫩芽定位误差。针对其他仿形方法,Chen等[15]采用深度学习的方法开展复杂背景下的茶叶嫩芽识别、采摘点定位[16]。Yang等[17]研究了其他形式的采摘器,但均因工作效率较低无法解决大宗茶采摘难题[18, 19]。
目前开展的仿形采茶机较大程度地减小劳动强度,提高生产效率,但仅局限于割刀高度方向的调整。在茶叶采摘过程中,由于地面不平导致割刀横轴上倾斜采茶,以及采茶过程受到茶茎反作用力下,割刀纵轴不能灵活调整等,仍然存在茶树损伤、碎叶率偏高等问题。因此本文提出一种适用于坡地茶园的割刀自适应采茶机,可根据茶稍高度自动调整割刀高度,利用茶茎反作用力自适应调整割刀纵轴切入角度,实现坡地上地面不平时横轴上自动校平割刀。
1 总体结构与工作原理
1.1 结构组成
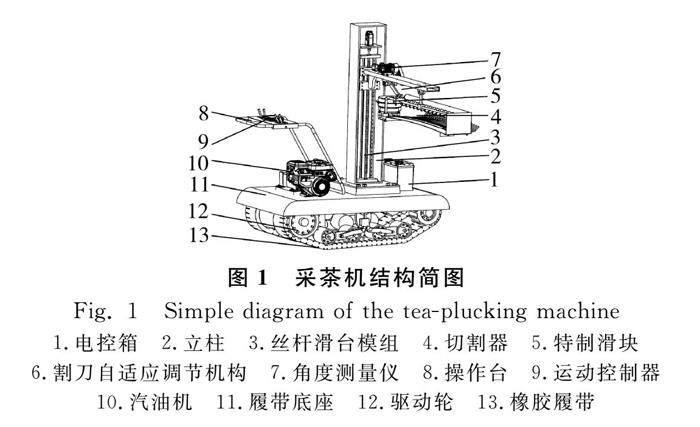
割刀自适应调节的采茶机主要由行走机构、丝杆滑台模组、切割器、割刀自适应调节机构等构成,如图1所示。
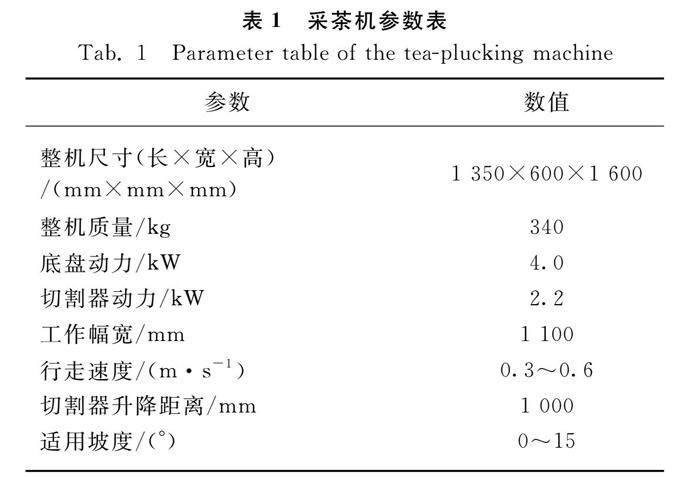
其中,行走机构主要包括履带式底盘和操作台。丝杆滑台模组安装于履带底座中心的立柱中,主要包括驱动电机,丝杆、导轨、螺母滑块等。切割器包括小型汽油机、割刀、拉杆、风机、风管、集叶梳、集叶袋等。自适应调节机构包括步进电机、同步带、曲柄、摇杆、悬臂和特制滑块等。采茶机主要技术参数如表1所示。
1.2 工作原理
采茶机在丘陵茶园工作过程中,假设水平方向为X轴,采茶机前进方向为Y轴,切割器升降方向为Z轴。采茶装置固定在螺母滑块上,通过丝杆滑台模组实现割刀沿Z轴(高度方向)的移动自由度控制。采茶机因地面不平导致割刀横向X轴倾斜,由角度检测仪检测地面坡度,控制安装在悬臂上的步进电机转动,通过同步带驱动曲柄转动相应角度;曲柄与特制滑块铰接,特制滑块可在切割器上方的拉杆中滑动,摇杆与拉杆相对固定;此时切割器受到水平自适应调节机构的约束可以实现割刀绕Y轴(前进方向)的转动自由度控制,使得割刀保持水平。拉杆在特制滑块中滑动的同时,通过平键与其内部切入角调节机构连接,使切割器在受到茶茎反作用力时可小幅度调节割刀的切入角,实现割刀绕X轴(水平方向)的力反馈自适应转动控制。集叶梳将茶叶嫩芽聚集,往复式切割器将嫩芽割下。风机鼓风至风管,将被割下的嫩芽吹进悬挂在切割器支架上的集叶袋中,完成茶叶采摘。
2 关键部件设计
2.1 水平自适应调节机构
水平自适应调节机构由步进电机、悬臂、摇杆、曲柄、切割器、特制滑块等部件构成,如图2所示,滑块B焊接在摇杆下端,并限制拉杆在该滑块中的轴向位移。当割刀倾斜时,驱动曲柄转动一定角度即可调平割刀。
根据整机设计要求和提前测得的缓坡茶园地形参数,切割器横轴偏转最大夹角值为30°,当曲柄与切割器拉杆相互垂直时,切割器运动到下极限位置,如图3所示,过B点作水平线交CD于E,根据机构几何特性可确定各杆长之间的关系,可初步确定L1为550mm,L2为200mm,L3为342mm。
5 仿真分析
5.1 方案设计
优化自适应采茶装置结构时,需要综合考虑运动空间、部件尺寸与安装位置。测量SVR110型切割器外形尺寸,需在拉杆上方预留100mm的空间用于安装小型汽油机,分析切割器工作空间、悬臂长度(1000mm)和各零件受力情况,确定悬臂上两铰链安装距离范围为500mm≤L1≤650mm,摇杆长度范围为150mm≤L2≤250mm。
根据式(1),不同的L1、L2组合决定曲柄L3的长度,机构各运动参数也会发生改变。设置仿真时间为3s,铰链安装长度L1、摇杆L2的初始值分别为500mm、150mm,进行间距为50mm的仿真试验,设定仿真参数如表2所示。
本文使用SolidWorks软件建立采茶机三维模型,将切割器简化为质点作用于拉杆上,使用布尔操作合并拉杆与摇杆。忽略对割刀水平自适应运动过程各参数影响很小的零件,如插销、螺母、垫片等。将简化后的模型导入ADAMS中。根据水平自适应调节机构的运动特性,定义各零件约束条件,如表3所示。
5.2 仿真结果与分析
在仿真模型中,按照表3约束条件添加运动副。通过分析割刀从下极限位置偏转30°到上极限位置运动过程中关键构件的参数变化情况,从而确定最优组合。
图9~图10是不同铰链安装长度与不同摇杆长度组合下的割刀角速度、角加速度的曲线图。以其中2组仿真试验为例,图9(a)、图10(a)是铰链安装长度L1为500mm分别与摇杆长度L2为150mm、200mm、250mm组合下的割刀角速度、角加速度的曲线图;图9(b)、图10(b)是铰链安装长度L1为550mm分别与摇杆长度L2为150mm、200mm、250mm组合下的割刀角速度、角加速度的曲线。通过上述曲线可以看出,在2.5s前,割刀角速度、角加速度变化差距不大;在2.5s后,摇杆长度L2越小,割刀的角速度、角加速度變化越小;由于割刀在相同时间内偏转相同的角度,角加速度变化越小意味着割刀运动越平稳,有益于提高采茶质量。
图11是摇杆长度L2为150mm时,不同铰链安装长度特制滑块在切割器拉杆上的速度仿真分析。随着L1的减小,特制滑块在切割器拉杆上的速度不断减小;速度越小,在相同时间内,特制滑块在切割器拉杆上的位移越小;在满足机构设计参数的前提下,移动位移越小,机构越紧凑。
图12是铰链安装长度L1为500mm时,拉杆上某点的Z轴位移仿真情况分析。纵坐标表示该点与悬臂的距离,正负仅表示方向。可以看出,当摇杆长度L2为150mm和250mm时,该点纵坐标均为正值,表示该点会与悬臂干涉,无法满足设计要求。因此,为了保证机构运动平稳、结构紧凑,结合图9~图12的仿真分析,最终选择最优铰链安装长度L1=500mm,摇杆长度L2=200mm,此时曲柄长度为L3=330mm。
6 结论
本文设计一种割刀自适应的采茶装置,通过运动学分析、动力学分析和仿真试验。
1) 根据坡地茶园参数及茶茎力学特性,研究割刀水平自适应调节机构和割刀切入角自适应调节机构的结构特性;对采茶装置结构及参数进行设计,使割刀能在小于15°的坡地上始终保持水平,并使切割器在茶茎反作用力下偏转角最大值为15°。
2) 建立采茶装置关键构件参数的数学模型,并推导出割刀调平过程运动学方程及割刀切入角调节过程动力学方程,确定切割器在茶茎力作用下发生偏转的充要条件,进一步探究割刀的运动规律。
3) 设计割刀调平机构运动仿真试验,得到割刀调平过程中角速度、角加速度、特制滑块运动速度等参数变化规律,确定最优结构参数。最终确定铰链安装长度为500mm,摇杆长度为200mm,曲柄长度为330mm。
参 考 文 献
[1]
王文明, 肖宏儒, 宋志禹, 等. 茶叶生产全程机械化技术研究现状与展望[J]. 中国农机化学报, 2020, 41(5): 226-236.
Wang Wenming, Xiao Hongru, Song Zhiyu, et al. Research status and prospects of tea production mechanization technology [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(5): 226-236.
[2] 李楊, 董春旺, 陈建能, 等. 茶叶智能采摘技术研究进展与展望[J]. 中国茶叶, 2022, 44(7): 1-9.
Li Yang, Dong Chunwang, Chen Jianneng, et al. Research progress and prospect of intelligent tea picking technology [J]. China Tea, 2022, 44(7): 1-9.
[3] Terada J. Traveling type tea leaf plucking machine for sweep dew [P]. JP2010148519, 2010-07-08.
[4] 黄藩, 王云, 熊元元, 等. 我国茶叶机械化采摘技术研究现状与发展趋势[J]. 江苏农业科学, 2019, 47(12): 48-51.
Huang Fan, Wang Yun, Xiong Yuanyuan, et al. Research status and development trend of tea mechanized picking technology in China [J]. Jiangsu Agricultural Sciences, 2019, 47(12): 48-51.
[5] 易文裕, 程方平, 邱云桥, 等. 单人采茶机研究现状与发展趋势[J]. 中国农机化学报, 2020, 41(11): 33-38.
Yi Wenyu, Cheng Fangping, Qiu Yunqiao, et al. Research status and development trend of single tea picking machine [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(11): 33-38.
[6] 杜哲, 胡永光, 王升. 便携式采茶机切割器运动仿真与试验[J]. 农业机械学报, 2018, 49(S1): 221-226.
Du Zhe, Hu Yongguang, Wang Sheng. Simulation and experiment of reciprocating cutter kinematic of portable tea picking machine [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(S1): 221-226.
[7] 韩余, 肖宏儒, 秦广明, 等. 国内外采茶机械发展状况研究[J]. 中国农机化学报, 2014, 35(2): 20-24.
Han Yu, Xiao Hongru, Qin Guangming, et al. Studies on develop situations of tea-leaf picker both at home and abroad [J]. Journal of Chinese Agricultural Mechanization, 2014, 35(2): 20-24.
[8] 权启爱. 采茶机械的研制和我国采茶机械化事业的发展(续)[J]. 中国茶叶, 2018, 40(9): 8-12.
[9] 王升. 便携式电动采茶机关键部件设计与试验研究[D]. 镇江: 江苏大学, 2018.
Wang Sheng. Research design and experimental study on portable electric tea plucking machine [D]. Zhenjiang: Jiangsu University, 2018.
[10] Du Z, Hu Y, Buttar N A. Analysis of mechanical properties for tea stem using grey relational analysis coupled with multiple linear regression [J]. Scientia Horticulturae, 2020, 260: 108886.
[11] 闫晶晶. 仿形采茶机的优化设计及与茶园管理的协调性研究[D]. 合肥: 安徽农业大学, 2019.
Yan Jingjing. Optimization design of profiling tea picking machine and research on coordination with tea plantation management [D]. Hefei: Anhui Agricultural University, 2019.
[12] 汤一平, 韩旺明, 胡安国, 等. 基于机器视觉的乘用式智能采茶机设计与试验[J]. 农业机械学报, 2016, 47(7): 15-20.
Tang Yiping, Han Wangming, Hu Anguo, et al. Design and experiment of intelligentized tea-plucking machine for human riding based on machine vision [J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(7): 15-20.
[13] 赵润茂, 卞贤炳, 陈建能, 等. 分布控制的乘坐式仿形采茶原型机研制与试验[J]. 茶叶科学, 2022, 42(2): 263-276.
Zhao Runmao, Bian Xianbing, Chen Jianneng, et al. Development and test for distributed control prototype of the riding profiling tea harvester [J]. Journal of Tea Science, 2022, 42(2): 263-276.
[14] 吴敏, 郇晓龙, 陈建能, 等. 融合2D激光雷达与航向姿态参考系统的采茶机仿形方法研究与试验[J]. 茶叶科学, 2023, 43(1): 135-145.
Wu Min, Huan Xiaolong, Chen Jianneng, et al. Research and experiment on profiling method of tea picker based on fusion of 2D-LiDAR and attitude and heading reference system [J]. Journal of Tea Science, 2023, 43(1): 135-145.
[15] Chen Y T, Chen S F. Localizing plucking points of tea leaves using deep convolutional neural networks [J]. Computers and Electronics in Agriculture, 2020, 171: 105298.
[16] 朱红春, 李旭, 孟炀, 等. 基于Faster R-CNN网络的茶叶嫩芽检测[J]. 农业机械学报, 2022, 53(5): 217-224.
Zhu Hongchun, Li Xu, Meng Yang, et al. Tea bud detection based on Faster R-CNN network [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(5): 217-224.
[17] Yang H, Chen L, Ma Z, et al. Computer vision-based high-quality tea automatic plucking robot using Delta parallel manipulator [J]. Computers and Electronics in Agriculture, 2021, 181: 105946.
[18] 羅坤, 吴正敏, 曹成茂, 等. 茶鲜叶嫩梢捏切组合式采摘器设计与试验[J]. 农业工程学报, 2022, 38(13): 1-9.
Luo Kun, Wu Zhengmin, Cao Chengmao, et al. Design and experiment of the combined pinch and cut picker for tea fresh leaf tips [J]. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38(13): 1-9.
[19] 刘俊锋, 潘志刚, 陈勇, 等. 高档名优绿茶仿生采摘指气动控制系统研制[J]. 中国农机化学报, 2021, 42(3): 166-170, 188.
Liu Junfeng, Pan Zhigang, Chen Yong, et al. Development of the pneumatic control system for the bionic plucking fingers for high-quality green tea [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(3): 166-170, 188.
[20] 王琪, 林恒矗, 廖鹏, 等. 茶叶茎秆剪切力特性[J]. 福建农林大学学报(自然科学版), 2022, 51(3): 428-432.
Wang Qi, Lin Hengchu, Liao Peng, et al. Shearing mechanical properties of tea stem [J]. Journal of Fujian Agriculture and Forestry University(Natural Science Edition), 2022, 51(3): 428-432.
猜你喜欢
高中数理化(2024年6期)2024-05-08 19:57:03
汽车实用技术(2022年16期)2022-08-31 07:00:32
装备制造技术(2021年2期)2021-07-21 05:38:12
河北省科学院学报(2020年1期)2020-05-25 06:57:18
电子制作(2019年15期)2019-08-27 01:12:16
重型机械(2019年3期)2019-08-27 00:58:54
制造技术与机床(2018年11期)2018-11-23 01:07:50
浙江农业学报(2016年7期)2016-06-15 20:30:10
智能系统学报(2015年4期)2015-12-27 09:38:07
海军航空大学学报(2015年1期)2015-11-11 17:18:37