
枸杞机械化采收技术与装备研究进展
2024-05-30 11:53:39李彦晶胡忠强张亚萍王珺徐建恒
中国农机化学报 2024年5期
关键词:枸杞
李彦晶 胡忠强 张亚萍 王珺 徐建恒

摘要:枸杞机械化采收技术与装备的研究是实现枸杞产业节本增效、转变发展方式的重要途径,对枸杞产业的快速发展有着重要的推进作用。在分析枸杞种植模式及生物特性的基础上,重点阐述目前国内枸杞机械化采收方式和采收装备研究进展,对枸杞不同的采收方式和采收装备的作业特点和性能参数进行对比分析,指出我国的枸杞采收机械化水平较低。针对枸杞机械化采收装备关键技术、采收方式、农机农艺融合等方面存在的问题,提出规范枸杞的标准种植模式、改进完善末端执行装置及加大枸杞采收装备关键技术的研究等对策建议,为枸杞高效低损的机械化、智能化采收技术与装备的进一步发展和研究提供参考。
关键词:枸杞;收获机械;机械化采收;农机农艺融合
中圖分类号:S225.93
文献标识码:A
文章编号:2095-5553 (2024) 05-0016-07
收稿日期:2022年8月29日 修回日期:2022年10月17日*基金项目:甘肃省高等学校创新基金项目(2020B—238,2021A—161);兰州工业学院青年科技创新项目(2020KJ—08)
第一作者:李彦晶,女,1984年生,甘肃甘谷人,硕士,副教授;研究方向为农业机械化装备。E-mail: 937513890@qq.com
Research progress of technology and equipment for mechanized harvest of wolfberry
Li Yanjing1, Hu Zhongqiang2, Zhang Yaping1, Wang Jun1, Xu Jianheng3
(1. School of Automotive Engineering, Lanzhou Institute of Technology, Lanzhou, 730050, China;
2. Zhejiang Sifang Co., Ltd., Jinhua, 321302, China; 3. Zhejiang Crown Power Tools Manufacturing
Co., Ltd., Jinhua, 321016, China)
Abstract:
The research on the technology and equipment of mechanized harvesting for wolfberry is an important way to realize cost saving and high efficiency, and transform the development mode of wolfberry industry,which plays an important role in promoting the rapid development of wolfberry industry. Therefore, based on the analysis of planting patterns and biological characteristics of Lycium barbarum,the research progress on mechanized harvesting methods and equipment for wolfberry in China was emphatically expounded. It was also compared and analyzed the operation characteristics and performance parameters of different harvesting methods and harvesting equipment of wolfberry, it was pointed out that level of harvesting mechanization of wolfberry was still low in our country. In view of the problems existing in the key technologies of mechanized harvesting equipment, picking methods and integration of agricultural machinery and agronomy, countermeasures and suggestions were put forward to standardize the standard planting mode of wolfberry, improve the end-executing device and increase the key technologies of wolfberry harvesting equipment, so as to provide reference for the further development and research of mechanized and intelligent harvesting technology and equipment of wolfberry with high efficiency and low loss.
Keywords:
wolfberry; harvesting machinery; mechanized harvest; agricultural machinery and agronomy integration
0 引言
枸杞是一种季节性较强且分段成熟的茄科枸杞属植物,在我国西北地区是重要的特色经济作物之一,具有较强的适应性和耐旱、耐盐碱性,药食两用,且药理作用和保健功效较好,此外也可制酒和饮料[1-4]。近年来,我国枸杞种植面积约为2×105 hm2,主要种植区分布在宁夏、青海、甘肃、新疆和内蒙古等地,其中宁夏是国内枸杞的原产地和主产区,宁夏枸杞也最为出名,并且在2018年成立了我国首个枸杞研究院—中国枸杞研究院;青海野生枸杞资源丰富,不仅是枸杞生物多样性发源地之一,而且是国内枸杞的新兴种植区;甘肃是枸杞传统主产区,枸杞不仅是甘肃省的“十大陇药”之一,而且是传统道地药材,更是农民增收致富的“金果产业”和“绿色银行”;新疆是我国枸杞种植最北区域,独特的地理条件和区域气候有利于枸杞产业的发展;内蒙古将枸杞作为经济发展和退耕还林的“先锋”树种[5-7]。
目前,枸杞全程机械化生产主要由产前机械化(机械化育苗和移栽)、产中机械化(机械化植保和采收)和产后机械化(鲜果加工机械化)三大环节组成[8]。其中,枸杞的机械化采收是枸杞全程机械化生产过程中最重要的环节。随着农药雾化理论、喷雾技术及植保无人机施药技术取得的进步与发展[9],使得产中植保机械化水平明显提升,但由于枸杞属于浆果,果实小、果皮薄、水分大、易破损、枝条细软交错,在采摘期内分批多次成熟,且边开花边结果边采摘,同时枸杞采收受天气的影响较大,使得产中机械化采收难度较大,而一些蓝莓、樱桃等浆果类采收机不能满足枸杞机械化收获的要求;此外,传统的人工采收方式劳动强度大、效率低、成本高,这种采收方式已不能满足社会生产需求,一定程度上限制了枸杞采收机械化水平。因此,为推动枸杞产业的高效快速发展,枸杞采收装备虽然取得阶段性进展,但仍然存在一些问题,需要进一步对不同枸杞采收装备的研发开展深入研究。
本文在分析枸杞种植模式及生物特性的基础上,重点阐述目前国内枸杞机械化采收方式和采收装备研究进展,对枸杞不同的采收方式和采收装备的作业特点和性能参数进行对比分析,指出枸杞机械化采收装备关键技术、采收方式、农机农艺融合等方面存在问题并提出相关建议。
1 枸杞种植模式及生物特性
枸杞的种植多属密植型,种植模式主要有传统种植模式和标准种植模式两种。标准种植模式因其树型主干竖直,树高、树宽、挂果枝条长短、行距和株距一致性好,挂果规律且具有同面性,宜进行机械化作业等优点而被广泛推广[10-12]。对甘肃省靖远县栽植5年的部分成龄枸杞树进行实测,枸杞的行距为2.5~3 m,株距1.0~1.5 m,平均株高1.6 m,平均冠幅1.4 m,平均每公顷约4 500株左右。
枸杞的主要特性表现为两点:一是果实与枝条、花与枝条之间的结合力F,即主要是青果果梗F1、成熟果果梗F2、成熟果果蒂F2′和花F3的结合力[13, 14],研究表明:各处结合力的大小不同,F2>F1>F3>F2′,且结合力随枸杞品种的不同也有差异;二是枸杞是“无限花序、连续花果”,在枸杞的采收过程中,如若损伤青果和花朵等[15, 16],将直接影响下茬枸杞的产量。枸杞的采收通常在每年的6—8月(夏果)和9—11月(秋果)左右,根据果实成熟度的不同,其理化性质不同,若采收早,则枸杞小而硬,且青果较多;若采收晚,则有烂果、莓果等,所以为了不降低枸杞的质量和产量,在果实圆润且成形饱满时进行采收,一般初果期平均采摘周期7~10 d,盛果期平均采摘周期5 d,末果期平均采摘周期7 d。枸杞机械化采收是限制枸杞产业快速发展的主要瓶颈,提高枸杞采收机械化装备水平,对实现枸杞高效低损机械化、智能化采收具有重要意义。
2 国内外枸杞机械化采收技术与装备研究进展
2.1 国外枸杞机械化采收技术与装备研究进展
国外对浆果类采收机械的研究较多,但对枸杞的采收机械研究很少,So[17]针对韩国枸杞的生物力学特性,设计了一款振动式枸杞采收装置。该装置通过试验得出最佳技术参数值:当振动频率为15~20 Hz,振幅为25~35 mm,振动时间为3 s时,采净率为82%,采收效率为4.717 kg/h,是传统人工采收效率的4.2倍,但国外枸杞生长特性和种植模式与我国不同,且该装置的采收效率并不高,因此不适用于我国枸杞的机械化采收。
2.2 国内枸杞机械化采收技术与装备研究进展
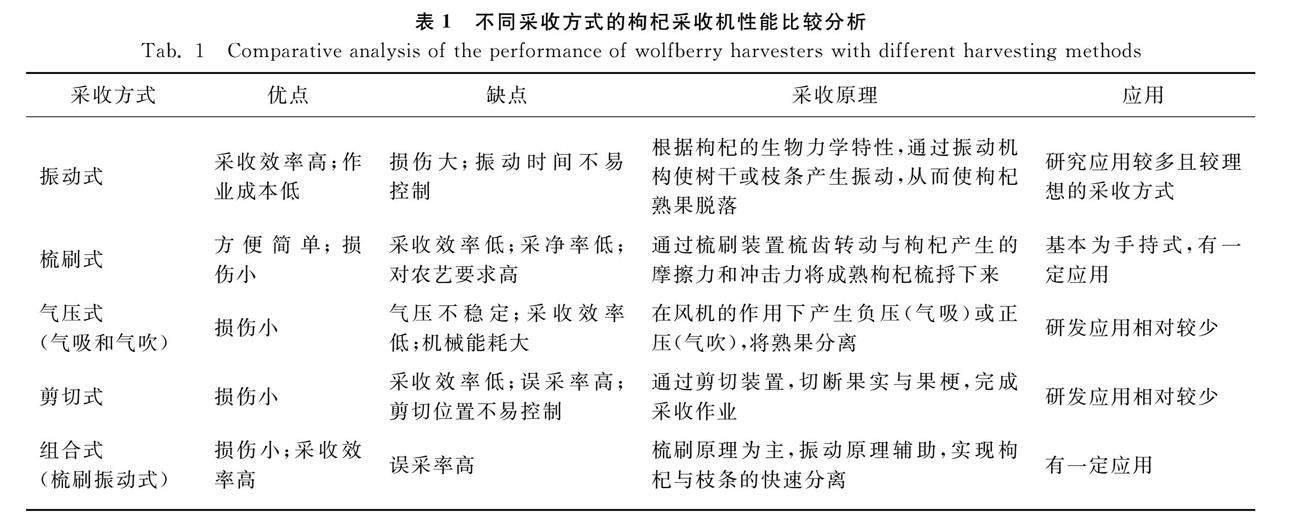
我国是枸杞种植面积较多的国家,21世纪初国内才对枸杞采收机械进行研究,目前处于发展阶段,主要在宁夏等几个主产区进行研究。目前,枸杞采收机主要有便携式枸杞采收装置和自走式枸杞采收机两大类,采收方式分为振动式、梳刷式、气吸式、剪切式和组合式等,其中以振动采收方式应用最为普遍,表1为不同采收方式的枸杞采收机性能比较分析。分析表明:不同的采收方式在采收作业过程中,采收效率虽比传统采收均有不同程度的提高,但仍存在对熟果的漏采和对青果、花朵、枝条及叶片造成损伤及误采现象,影响枸杞后续的生长和产量。后期研究人员可针对这些采收方式的枸杞采收机继续进行改进和优化,最终达到对枸杞高效率、低损伤、机械化及智能化采摘。
1) 便携式枸杞采收装备。
目前,国内枸杞采收装备,主要以振动、梳刷便携式为主,例如宁夏农林科学院国家枸杞工程技术研究中心与宁夏某公司联合研制开发的4ZGB-30型便携式枸杞采摘机,首次实现了枸杞采摘样机的研制,自此打破了数百年人工采摘的历史,该采摘机通过偏心圆盘将瞬时力作用给枝条,使枸杞脱落,实现机械化采摘。
万芳新等[18]通过正交旋转组合试验对便携式枸杞振动采收装置的结构与参数进行优化,降低损伤率;张文强等[19]设计优化针对枸杞枝条的振摇枸杞采收机,通过平移板上振摇指排使枝条产生晃动,实现枝条与枸杞的脱离、枸杞与梳刷的分离,采收效果较好。
张文强等[20]还设计并优化手持变间距梳刷式枸杞采收装置,通过梳刷与枸杞间产生的摩擦力將枸杞与枝条脱离,利用梳刷指间距变化的周期性,实现枸杞与梳刷指的分离,为枸杞机械化采收提供一种新型的末端执行方案;马永龙等[21]设计可根据果型大小更换梳板的手持式双梳板可变间距枸杞采摘器,该采摘器有上下两个梳板,工作时合二为一,梳齿为镰刀状,根部为等间距直齿,尖端为齿间距逐渐减小的斜齿,且为方便采收,梳齿的角度为钝角,并指向手柄方向,采收后的枸杞落入收集盒,降低生产成本。
余水等[22]设计由采摘头和果实收集盒组成的便携式枸杞采摘装置,该装置利用旋转的螺旋形采摘片,实现枸杞采摘,该装置结构简单,操作方便,损伤率较小;陈军等[23]通过振动和梳刷原理相融合设计便携振刷式枸杞采收机,实现枸杞机械采收的高效低损。
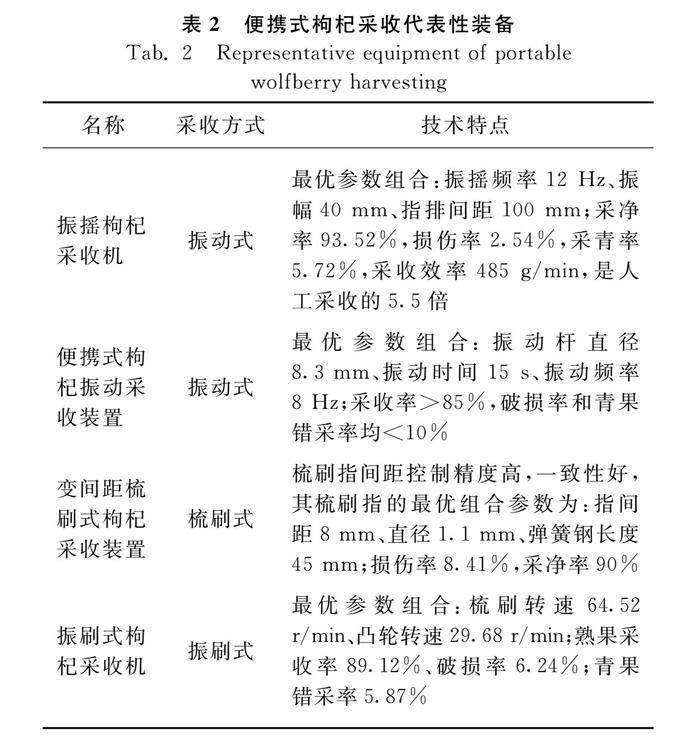
上述国内便携式枸杞采收代表性装备,具体见表2。
这几种采收装备均为手持便携式,是一种精巧的农用手持机械,具有结构简单、体积小、成本低、携带方便和操作简单等优势,适用于中小型枸杞种植面积配套,在盛果期,采摘效率是人工的3~5倍,提高了采收效率,但这些采收机基本都为半机械化,仍然依赖于人工,因此对于枸杞的大面积种植区域,不能满足采摘期相对集中的季节性要求和劳动力短缺现状,且长时间的操作使得农户劳动强度大,采收效率反而并不高,还普遍存在对青果、枝叶和花朵的误采、损伤等问题。
2) 自走式枸杞采收装备。
目前,小型便携式枸杞采收装备在采收过程中存在着低效高损、采净率低、青果误采率较高、不能连续采收等共性问题。这些共性问题制约了我国枸杞产业的高速发展,急需解决。
如表3所示,国内一些研究学者为实现枸杞机械化连续采收和提高枸杞采收高效低损的机械化水平,根据枸杞的生物特性和种植模式,对自走式枸杞采收机进行相关研究和试验。农业农村部南京农业机械化研究所对履带自走式枸杞采收机研究较多,如张最等[24, 25]设计了额定功率为38 kW的4GZ-1500A自走振动式枸杞采收机,该采收机通过建立枸杞振动采摘力学模型,对工作参数进行优化,得到了最佳参数组合,采摘效率得到一定程度的提高,但该研究只针对夏果,且未考虑枸杞挂果枝条在树干各方向的无规律分布情况,核心振动单元设计未实现轻量化;梅松等[26]通过农机农艺融合的思路,在自走式枸杞机械化连续采收技术方面有所突破,并取得阶段性成果,设计了以隧道式仿形往復振动系统和柔性接果防漏归集系统为目标,基于往复振动方法的4GQF-2200型枸杞采收机,取得较好的试验效果,实现枸杞采收机高效低损的机械化采收,该采收机虽然对往复振动单元进行轻量化处理,但青果、花朵等的错采率并没有得到很大的改善,并且通过气吹原理实现果实分选归集,功率消耗较大[27, 28]。
徐丽明等[29]将振动采收原理和梳刷采收原理相结合,通过优化实现枸杞熟果、果柄在外力作用下的分离过程控制,确定影响熟果脱落的主要因素,并设计梳刷振动式枸杞收获装置,该装置有两个运动,一个以机构的整体运动为主,起旋转梳刷的作用,另一个是内部运动,即收获杆的辅助振动作用,梳刷振动同时作用,使枸杞快速脱落,实现梳刷振动组合式采收,且通过试验确定采收效果最佳的参数组合,提高采收效率,降低作业成本。
研发的三款枸杞采收机均体积较大,根据不同的种植模式进行作业,均大幅提高枸杞的采收效率,达到“摘熟留青”的采摘目标,尤其是梳刷振动式枸杞收获装置在成熟枸杞采收率与破损率两个方面有较明显地改善,但这些采收机仍需要进一步开展可靠性、精准性和耐久性等试验,以及枸杞不同种植地域作业适应性研究。因此,我国枸杞采收技术与装备仍处在探索与试验阶段。
3 存在问题与发展建议
我国研制的枸杞机械化采收装备为枸杞采收作业带来了一定程度的便利,但由于枸杞生长特性和采收作业的复杂性,使得我国枸杞采收机械化水平不高,存在对枸杞熟果采摘精准度低,青果、花和枝叶等误采率高,损伤大,通用性低等问题。枸杞机械化采收的技术目标是实现高效低损,进而实现自动化、智能化和信息化采收,结合枸杞生物特性和机械化采收现状及已有技术,提出以下问题与建议。
3.1 存在问题
3.1.1 采收装备与种植模式融合度不够
枸杞挂果枝条细软交错,生长方向各异,树冠结构无规律,果实易损伤,边开花边结果边成熟,且成熟度不同的枸杞与果梗、果蒂之间的结合力有差异;另外,不同地区的种植农艺不同,大规模的枸杞标准种植园很少。因此枸杞的生物特性和差异化的种植农艺增加了采收装备的研发难度和成本,可推广性和通用性差。
3.1.2 末端执行装置作业性能较差,采收方式单一
无论小型便携式枸杞采收装置,还是大中型自走式枸杞采收机,其末端执行方式普遍单一,且不同采收方式的末端执行装置均对熟果、青果和花等有所损伤,直接影响枸杞的质量和下一茬产量。采用振动式采收的末端执行装置通过振动源,选用不同的频率对枸杞树进行振摇或对枝条进行拍打,使枸杞振落,提高了采收效率,降低了劳动强度,但在振摇或拍打过程中,对挂果枝条造成损伤,影响后续枸杞树生长[2, 3],且对手持式的采收装备,若长时间的机械工作使劳动者产生手部疲劳,降低了工作能力;由于枸杞果实与花无规律的相互穿插,当采用梳刷式采收的末端执行装置作业时,对花和枝条等有损伤,且枝条易缠绕,影响采收的连续性,采收效率较低。
3.1.3 采收技术低,专业技术人才缺乏
国内对枸杞机械化采收装备的重视程度不够,在采收装备上的研发投入不足或较少,科研力度不够。目前,虽然枸杞采收技术和装备取得了一些进展,但整体上技术含量不高,仍存在问题,如对青果、花和枝叶等的损伤、错采及枸杞熟果识别的精准度等关键问题没有得到实质性的解决;自走式集成采收机研究较少,缺乏相关自主知识产权技术及关键部件的科研成果转化进程缓慢,制约了枸杞采收的机械化发展。另外,相关研究领域的领军人才和创新团队匮乏,采收装备技术研发人员不足,人才队伍结构不完善。
3.2 发展建议
3.2.1 加强农机农艺的融合
枸杞机械化的发展离不开配套的农艺,研究枸杞与果柄、枸杞与采收机作用部件之间的关系,通过规范化的标准建园模式种植枸杞、整形修剪,使枸杞冠型结构合理、枝条分布均匀、挂果规律,为机械化采收提供条件,方便枸杞的采收,且保证枸杞机械化采收装备作业时的灵活性和通用性。
3.2.2 加强末端执行装置的改进
结合枸杞的生物特性,采用组合式的采收方式,使枸杞在采收作业过程中受到来自不同方向的作用力而更容易脱落;将柔性材料应用在末端执行装置上,降低损伤率和误采率;在手持振动式采收机上设计减振装置,降低手部疲劳感。
3.2.3 加大研发力度,突破采收装备关键技术
对枸杞采收装备进行全面和深入的理论研究与试验,并进行工作参数优化设计,加强农机企业、学校和科研院所对关键结构和核心技术的联合研究力度,发挥各自优势,解决技术难题;采用自动控制技术、传感与检测技术、图像识别技术等新兴技术[30],通过大小、颜色、成熟度等选择性识别,以提高采收装备的技术水平和技术含量;加强枸杞相关方面人才的储备,稳定人才队伍,加强科技创新团队建设,实现大而强,多而优的局面,使枸杞采收的机械化水平提高,并逐渐向自动化、智能化和信息化方向发展。
4 结语
枸杞药食价值的不断挖掘,加速了枸杞产业的发展,机械化采收是枸杞产业节本增效、转变发展方式的重要途径。目前我国研发的各类枸杞采收装备,一定程度上提高了采收率,降低了采收成本、误采率及对青果、花和枝叶等的损伤问题,但是枸杞在采收作业时的误采、漏采和破损等关键技术问题没有得到大的突破,因此我国的枸杞采收技术与装备仍处在探索与试验阶段,需进一步对关键部件进行研制。同时,枸杞机械化采收方式在一段时间内仍然以振动和梳刷式为主,有必要对末端执行装置进一步改进完善,不断探知更加适合枸杞机械化采收高效低损的技术与装备。
随着自动控制技术、传感器感知精度、识别速度、大数据、云计算等新兴技术的发展,加大提升枸杞机械采收技术与装备关键环节的基础理论研究力度,规范枸杞的种植模式、整形修剪等农艺,持续提升和改进现有便携式枸杞采收装备和自走式枸杞采收机的作业性能,以期进一步解决精准识别、误采、漏采和破损等关键问题。此外,重点开展大面积标准化种植园的宜机化研究,促进自走式枸杞采收机的通用性和集成化、智能化和信息化发展,建立起一个可持续发展的枸杞采收机械化技术体系,对于提高我国枸杞高效低损的机械化采收、推动枸杞产业的现代化发展具有重要意义。
参 考 文 献
[1] 任珩, 王君兰. 我国枸杞产业发展现状及提升路径[J]. 科技促进发展, 2019, 15(3): 310-317.
Ren Heng, Wang Junlan. The development status and improving path of Lyceum Barbarum L. industry in China [J]. Science & Technology for Development, 2019, 15(3): 310-317.
[2] 马嘉伟. 我国枸杞机械化采摘技术的现状及发展趋势[J]. 机械研究与应用, 2017, 30(4): 151-153, 155.
Ma Jiawei. Research status and prospect of the mechanized technology of picking wolfberry in China [J]. Mechanical Research & Application, 2017, 30(4): 151-153, 155.
[3] 石志刚, 肖宏儒, 万如, 等. 枸杞采摘机研究进展[J]. 农业科技与装备, 2016(5): 53-56.
Shi Zhigang, Xiao Hongru, Wan Ru, et al. Research progress of Chinese wolfberry picking machine [J]. Agricultural Science & Technology and Equipment, 2016(5): 53-56.
[4] Amagase H, Farnsworth N R. A review of botanical characteristics, phytochemistry, clinical relevance in efficacy and safety of Lyceum barbarum fruit (Goji) [J]. Food Research International, 2011, 44(7): 1702-1717.
[5] 王海英. 國内主要枸杞产区基本情况调查[J]. 青海农林科技, 2013(4): 10-12.
Wang Haiying. Investigation on the basic conditions of domestic main wolfberry producing areas [J]. Science and Technology of Qinghai Agriculture and Forestry, 2013(4): 10-12.
[6] 雒晓兵. 靖远县枸杞产业现状及发展建议[J]. 大众科技, 2021, 23(6): 82-84, 93.
Luo Xiaobing. Current situation and development suggestions of wolfberry industry in Jingyuan County [J]. Popular Science & Technology, 2021, 23(6): 82-84, 93.
[7] 李向东, 康天兰, 刘学周, 等. 甘肃省枸杞产业现状及发展建议[J]. 甘肃农业科技, 2017(1): 65-69.
Li Xiangdong, Kang Tianlan, Liu Xuezhou, et al. Development suggestions and status of wolfberry industry in Gansu Province [J]. Gansu Agricultural Science and Technology, 2017(1): 65-69.
[8] 赵凤勇. 枸杞机械化生产装备与技术需求分析[J]. 中国农机化, 2012(2): 44-45, 53.
Zhao Fengyong. Production equipment and technology requirement analysis of wolfberry mechanization [J]. Chinese Agricultural Mechanization, 2012(2): 44-45, 53.
[9] 陳盼阳, 秦维彩, 王宝坤. 植保无人飞机施药技术研究进展[J]. 中国农机化学报, 2022, 43(1): 67-79.
Chen Panyang, Qin Weicai, Wang Baokun. Research progress application technology of plant protection UAV [J]. Journal of Chinese Agricultural Mechanization, 2022, 43(1): 67-79.
[10] 彭要, 张正勇, 刘洋, 等. 精准夹持振动式枸杞采摘装置设计与实验[J]. 机械研究与应用, 2018, 31(6): 123-129, 132.
Peng Yao, Zhang Zhengyong, Liu Yang, et al. Design and experiment of accurate clamping vibration wolfberry harvesting machine [J]. Mechanical Research & Application, 2018, 31(6): 123-129, 132.
[11] 赵映, 肖宏儒, 王新江, 等. 基于标准化种植模式下4GQB-3300枸杞采摘机设计与脱果试验[J]. 中国农机化学报, 2019, 40(6): 43-51.
Zhao Ying, Xiao Hongru, Wang Xinjiang, et al. Design and fruit drop experiment of 4GQB-3300 Lycium L. harvester based on standardized planting mode [J]. Journal of Chinese Agricultural Mechanization, 2019, 40(6): 43-51.
[12] 程敬春, 郭辉, 韩长杰, 等. 枸杞机械采摘技术研究现状及发展趋势[J]. 农业科技与装备, 2012(3): 12-13.
Cheng Jingchun, Guo Hui, Han Changjie, et al. Present situation and analysis of Chinese wolfberry mechanical picking technology research in China [J]. Agricultural Science & Technology and Equipment, 2012(3): 12-13.
[13] 李乐凯. 基于振动式采摘的枸杞植株生物力学关键特性研究[D]. 银川: 宁夏大学, 2020.
Li Lekai. Research on the biomechanical characteristic of wolfberry plant based on the vibrating harvesting [D]. Yinchuan: Ningxia University, 2020.
[14] 何苗, 坎杂, 李成松等. 枸杞振动采收机理分析与试验[J]. 农业工程学报, 2017, 33(11): 47-53.
He Miao,Kan Za, Li Chengsong, et al. Mechanism analysis and experiment on vibration harvesting of wolfberry [J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(11): 47-53.
[15] Du Xiaoqiang, Chen Du, Zhang Qin, et al. Dynamic responses of sweet cherry trees under vibratory excitation [J]. Biosystems Engineering, 2012, 111(3): 305-314.
[16] 何苗, 李成松, 王丽红, 等. 枸杞采收装置的研究现状[J]. 安徽农业科学, 2015, 43(33): 367-369, 385.
He Miao, Li Chengsong, Wang Lihong, et al. Research status of the harvesting device of Lycium barbarum L. [J]. Journal of Anhui Agricultural Sciences, 2015, 43(33): 367-369, 385.
[17] So J D. Vibratory harvesting machine for boxthorn (Lycium Chinense Mill) berries [J]. Transactions of the American Society of Agricultural Engineers, 2003, 46(2): 211-221.
[18] 万芳新, 孙浩博, 杜小龙, 等. 自走式枸杞振动采收机设计与试验[J]. 干旱地区农业研究, 2021, 39(5): 231-238.
Wan Fangxin, Sun Haobo, Du Xiaolong, et al. Design and test of self-propelled Lycium barbarum vibrating harvester [J]. Agricultural Research in the Arid Areas, 2021, 39(5): 231-238.
[19] 张文强, 张明明, 张俊雄, 等. 振摇枸杞采收机设计与试验[J]. 农业机械学报, 2018, 49(7): 97-102.
Zhang Wenqiang, Zhang Mingming, Zhang Junxiong, et al. Design and experiment of vibrating wolfberry harvester [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(7): 97-102.
[20] 张文强, 李召召, 谭豫之, 等. 变间距梳刷式枸杞采收装置优化设计与试验[J]. 农业机械学报, 2018, 49(8): 83-90.
Zhang Wenqiang, Li Zhaozhao, Tan Yuzhi, et al. Optimal design and experiment on variable pacing combing brush picking device for Lycium barbarum [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(8): 83-90.
[21] 马永龙, 耿峻. 双梳板可变间距梳耙式枸杞采摘器设计[J]. 内燃机与配件, 2018(1): 226-227.
[22] 余水, 郭书杰, 杨栋, 等. 便携式枸杞采摘装置设计[J]. 机械研究与应用, 2018, 31(5): 113-114, 117.
Yu Shui, Guo Shujie, Yang Dong, et al. Design of portable wolfberry picking machine [J]. Mechanical Research & Application, 2018, 31(5): 113-114, 117.
[23] 陈军, 赵健, 陈云, 等. 振刷式枸杞采收机设计与试验优化[J]. 农业机械学报, 2019, 50(1): 152-161, 95.
Chen Jun, Zhao Jian, Chen Yun, et al. Design and experiment on vibrating and comb brushing harvester for Lycium barbarum [J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(1): 152-161, 95.
[24] 张最, 肖宏儒, 丁文芹, 等. 振动式枸杞采摘机理仿真分析与样机试验[J]. 农业工程学报, 2015, 31(10): 20-28.
Zhang Zui, Xiao Hongru, Ding Wenqin, et al. Mechanism simulation analysis and prototype experiment of Lycium barbarum harvest by vibration mode [J]. Transactions of the Chinese Society of Agricultural Engineering, 2015, 31(10): 20-28.
[25] 张最. 振动式枸杞采摘机构的设计与试验[D]. 北京: 中国农业科学院, 2016.
Zhang Zui. The design and experiment of Lycium barbarum harvesting mechanism by vibration mode [D]. Beijing: Chinese Academy of Agricultural Sciences, 2016.
[26] 梅松, 肖宏儒, 石志刚, 等. 基于往复振动方法的枸杞低损采收技术装备设计与试验[J]. 中国农机化学报, 2019, 40(11): 100-105, 208.
Mei Song, Xiao Hongru, Shi Zhigang, et al. Design and test of low-loss Lycium barbarum harvesting technology and equipment based on reciprocating vibration method [J].Journal of Chinese Agricultural Mechanization, 2019, 40(11): 100-105, 208.
[27] 胡明明, 万芳新, 杜小龙, 等. 振动式枸杞采摘机设计[J]. 中国农机化学报, 2018, 39(7): 25-29.
Hu Mingming, Wan Fangxin, Du Xiaolong, et al. Design of vibrating wolfberry picking machine [J]. Journal of Chinese Agricultural Mechanization, 2018, 39(7): 25-29.
[28] 胡明明. 振动式枸杞采摘机虚拟样机设计[D]. 兰州: 甘肃农业大学, 2018.
Hu Mingming. Virtual prototype of vibrating Chinese wolfberry picking machine [D]. Lanzhou: Gansu Agricultural University, 2018.
[29] 徐丽明, 陈俊威, 吴刚, 等. 梳刷振动式枸杞收获装置设计与运行参数优化[J]. 农业工程学报, 2018, 34(9): 75-82.
Xu Liming, Chen Junwei, Wu Gang, et al. Design and operating parameter optimization of comb brush vibratory harvesting device for wolfberry [J]. Transactions of the Chinese Society of Agricultural Engineering, 2018, 34(9): 75-82.
[30] 袁建霞, 張秋菊, 胡小鹿, 等. 农业传感器国际竞争态势与研究前沿分析[J]. 现代农业科技, 2019(14): 233-235, 237.
Yuan Jianxia, Zhang Qiuju, Hu Xiaolu, et al. Analysis on international competition situation and research fronts of agricultural sensor [J]. Modern Agricultural Science and Technology, 2019(14): 233-235, 237.
猜你喜欢
红蜻蜓·低年级(2023年10期)2023-10-31 08:28:06
学与玩(2022年2期)2022-05-03 09:46:45
中老年保健(2021年2期)2021-08-22 07:29:32
绿色中国(2019年13期)2019-11-26 07:11:00
阅读(低年级)(2019年9期)2019-11-15 11:07:53
海峡姐妹(2019年5期)2019-06-18 10:40:50
中国生殖健康(2019年12期)2019-01-07 01:54:44
基层中医药(2018年10期)2018-12-06 09:27:22
基层中医药(2018年6期)2018-08-29 01:20:08
祝您健康·文摘版(2018年3期)2018-04-06 18:11:18
